อ่าน 18 นาที
ไอซีตัวจับเวลา 555
ไอ ซีตัวจับเวลา 555 เป็น วงจรรวม ที่ใช้ในงาน จับเวลา หน่วงเวลา สร้างพัลส์ และ ออสซิลเลเตอร์...
ไอซีตัวจับเวลา 555
 | |
| ประเภทส่วนประกอบ | วงจรแอคทีฟแบบ รวม |
|---|---|
| นักประดิษฐ์ | ฮันส์ คาเมนซินด์ (1971) |
| ผลิตครั้งแรก | พ.ศ. 2515 |
| สัญลักษณ์อิเล็กทรอนิกส์ | |
 | |
ไอซีตัวจับเวลา 555เป็นวงจรรวม ที่ใช้ในงาน จับเวลาหน่วงเวลา สร้างพัลส์ และออสซิลเลเตอร์หลากหลายประเภทเป็นหนึ่งในไอซีจับเวลาที่ได้รับความนิยมมากที่สุดเนื่องจากมีความยืดหยุ่นและราคาไม่แพง วงจรที่พัฒนาต่อยอดจาก 555 มีวงจรจับเวลาสอง ( 556 ) หรือสี่ ( 558 ) วงจรในแพ็คเกจเดียว[ 2 ]การออกแบบนี้วางจำหน่ายครั้งแรกในปี 1972 โดยSignetics [ 3 ] [ 4 ]และใช้ทรานซิสเตอร์แบบไบโพลาร์จังก์ชัน ตั้งแต่นั้นมา บริษัทจำนวนมากได้ผลิตตัวจับเวลาแบบดั้งเดิมและต่อมาได้ผลิตตัวจับเวลา CMOSพลังงานต่ำที่คล้ายกันในปี 2017 มีการกล่าวว่ามีการผลิตตัวจับเวลา 555 มากกว่าหนึ่งพันล้านตัวต่อปีตามการประมาณการบางอย่าง และการออกแบบนี้ "น่าจะเป็นวงจรรวมที่ได้รับความนิยมมากที่สุดเท่าที่เคยมีมา" [ 5 ]
ประวัติศาสตร์



ไอซีตัวจับเวลาได้รับการออกแบบในปี 1971 โดยHans Camenzind ภายใต้สัญญา จ้างกับSignetics [ 3 ] ในปี 1968 เขาได้รับการว่าจ้างจาก Signetics ให้พัฒนา ไอซี วงจรล็อกเฟส (PLL) เขาออกแบบออสซิลเลเตอร์สำหรับ PLL โดยที่ความถี่ไม่ขึ้นอยู่กับแรงดันไฟฟ้าหรืออุณหภูมิของแหล่งจ่ายไฟ ต่อมา Signetics ได้เลิกจ้างพนักงานครึ่งหนึ่งเนื่องจากภาวะเศรษฐกิจถดถอยในปี 1970และการพัฒนา PLL จึงหยุดชะงักลง[ 6 ] Camenzind เสนอการพัฒนาวงจรอเนกประสงค์โดยใช้ออสซิลเลเตอร์สำหรับ PLL และขอให้เขาพัฒนาวงจรนี้ด้วยตนเอง โดยยืมอุปกรณ์จาก Signetics แทนที่จะถูกลดเงินเดือนลงครึ่งหนึ่ง แนวคิดของ Camenzind ถูกปฏิเสธในตอนแรก เนื่องจากวิศวกรคนอื่นๆ โต้แย้งว่าผลิตภัณฑ์สามารถสร้างได้จากชิ้นส่วนที่มีอยู่ซึ่งบริษัทจำหน่าย อย่างไรก็ตาม ผู้จัดการฝ่ายการตลาดอนุมัติแนวคิดนี้[ 7 ]
การออกแบบครั้งแรกสำหรับ 555 ได้รับการตรวจสอบในช่วงฤดูร้อนของปี 1971 [ 8 ]หลังจากที่การออกแบบนี้ได้รับการทดสอบและพบว่าไม่มีข้อผิดพลาด Camenzind ก็ได้ไอเดียที่จะใช้ตัวต้านทานโดยตรงแทนแหล่งจ่ายกระแสคงที่ และพบว่ามันทำงานได้อย่างน่าพอใจ[ 8 ]การเปลี่ยนแปลงการออกแบบนี้ลดจำนวนขาภายนอกที่ต้องการจาก 9 ขาเหลือ 8 ขา ทำให้ IC สามารถบรรจุในแพ็คเกจ 8 ขาแทนที่จะเป็นแพ็คเกจ 14 ขา[ 8 ]เวอร์ชันที่แก้ไขนี้ผ่านการตรวจสอบการออกแบบครั้งที่สอง และต้นแบบเสร็จสมบูรณ์ในเดือนตุลาคม 1971 ในชื่อ NE555V (พลาสติกDIP ) และ SE555T (โลหะTO-5 ) [ 9 ] เวอร์ชัน 9 ขาได้รับการเผยแพร่แล้วโดยบริษัทอื่นที่ก่อตั้งโดยวิศวกรที่เข้าร่วมการตรวจสอบครั้งแรกและเกษียณจาก Signetics บริษัทนั้นได้ถอนเวอร์ชันของตนออกหลังจากที่ 555 ได้รับการเผยแพร่ไม่นาน ตัวจับเวลา 555 ผลิตโดยบริษัท 12 แห่งในปี พ.ศ. 2515 และกลายเป็นสินค้าขายดี[ 6 ]
555 พบการใช้งานมากมายนอกเหนือจากตัวจับเวลา Camenzind ตั้งข้อสังเกตในปี 1997 ว่า "เก้าในสิบของการใช้งานอยู่ในพื้นที่และวิธีการที่ฉันไม่เคยคิดมาก่อน เป็นเวลาหลายเดือนที่ฉันได้รับโทรศัพท์จากวิศวกรที่มีไอเดียใหม่ๆ ในการใช้อุปกรณ์นี้" [ 8 ]
ชื่อ
หนังสือหลายเล่มรายงานว่าชื่อ "555" ของไอซีตัวจับเวลามาจากตัวต้านทาน 5 kΩ สามตัวที่อยู่ภายในชิป[ 10 ] [ 11 ] [ 12 ]อย่างไรก็ตาม ในการสัมภาษณ์ที่บันทึกไว้กับภัณฑารักษ์พิพิธภัณฑ์ทรานซิสเตอร์ออนไลน์[ 13 ]ฮันส์ คาเมนซินด์ กล่าวว่า "มันถูกเลือกโดยพลการเท่านั้น อาร์ต ฟิวรี (ผู้จัดการฝ่ายการตลาด) คิดว่าวงจรนี้จะขายดีมาก จึงเลือกชื่อ '555' ไอซีตัวจับเวลา" [ 14 ]
ออกแบบ
ขึ้นอยู่กับผู้ผลิต แพ็คเกจ 555 มาตรฐานประกอบด้วยทรานซิสเตอร์ 25 ตัว ไดโอด 2 ตัวและตัวต้านทาน 15 ตัว บน ชิป ซิลิคอน ที่บรรจุใน แพ็คเกจแบบ Dual In-Line 8 ขา(DIP-8) [ 15 ]รุ่นที่มีให้เลือก ได้แก่ 556 (DIP-14 ที่รวม 555 สองตัวที่สมบูรณ์ไว้ในชิปเดียว) [ 16 ]และ 558 / 559 (ทั้งสองรุ่นเป็น DIP-16 ที่รวมตัวจับเวลาที่มีฟังก์ชันการทำงานลดลงสี่ตัวไว้ในชิปเดียว) [ 2 ]
ชิปNE555มีช่วงอุณหภูมิใช้งานเชิงพาณิชย์ตั้งแต่ 0 °C ถึง +70 °C และ ชิป SE555มีช่วงอุณหภูมิใช้งานทางทหารตั้งแต่ −55 °C ถึง +125 °C ชิปเหล่านี้มีให้เลือกทั้งแบบตัวเรือนโลหะที่มีความน่าเชื่อถือสูง (แพ็คเกจ T) และแบบตัวเรือนพลาสติกอีพ็อกซี่ราคาประหยัด (แพ็คเกจ V) ดังนั้นหมายเลขชิ้นส่วนเต็มจึงเป็น NE555V, NE555T, SE555V และ SE555T
ปัจจุบันมีเวอร์ชัน CMOS ที่ใช้พลังงานต่ำของ 555 วางจำหน่ายแล้ว เช่น Intersil ICM7555 และ Texas Instruments LMC555, TLC555, TLC551 [ 17 ] [ 18 ] [ 19 ] [ 20 ]
แผนผังภายใน
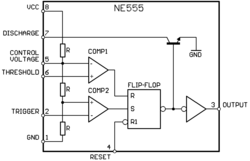
แผนภาพบล็อกภายในและแผนผังวงจรของตัวจับเวลา 555 ได้รับการเน้นด้วยสีเดียวกันในภาพวาดทั้งสามภาพเพื่อชี้แจงวิธีการใช้งานชิป: [ 2 ]
- วงจรแบ่งแรงดัน : ระหว่างแรงดันไฟเลี้ยงบวก VCCและกราวด์ GND มีวงจรแบ่งแรงดันประกอบด้วยตัวต้านทาน สามตัวที่เหมือนกัน (5 kΩสำหรับตัวจับเวลาแบบไบโพลาร์, 100 kΩ หรือสูงกว่าสำหรับ CMOS) เพื่อสร้างแรงดันอ้างอิงสำหรับตัวเปรียบเทียบแบบอนาล็อก CONTROL เชื่อมต่ออยู่ระหว่างตัวต้านทานสองตัวบนสุด ทำให้สามารถใช้แรงดันภายนอกควบคุมแรงดันอ้างอิงได้
- เมื่อไม่ได้มีการขับเคลื่อน CONTROL วงจรแบ่ง แรง ดันนี้จะ สร้างแรงดันอ้างอิงบนที่2/3 V CC และแรงดันอ้างอิงล่างที่1/3 V CC
- เมื่อสัญญาณ CONTROL ถูกขับ แรงดันอ้างอิงด้านบนจะเป็น V CONTROL และ แรง ดันอ้างอิงด้านล่างจะเป็น1/2 V CONTROL
- วงจรเปรียบเทียบค่าเกณฑ์ : อินพุตด้านลบของ วงจรเปรียบเทียบเชื่อมต่อกับแรงดันอ้างอิงด้านบนของตัวแบ่งแรงดัน และอินพุตด้านบวกของวงจรเปรียบเทียบเชื่อมต่อกับค่าเกณฑ์ (THRESHOLD)
- วงจรเปรียบเทียบแบบทริกเกอร์ : อินพุตบวกของ วงจรเปรียบเทียบเชื่อมต่อกับแรงดันอ้างอิงล่างของตัวแบ่งแรงดัน และอินพุตลบของวงจรเปรียบเทียบเชื่อมต่อกับ TRIGGER
- แลตช์ : แลตช์แบบตั้งค่าและรีเซ็ตจะเก็บสถานะของตัวจับเวลาและถูกควบคุมโดยตัวเปรียบเทียบสองตัว ค่า RESET จะแทนที่ค่าอินพุตอีกสองตัว ดังนั้นแลตช์ (และตัวจับเวลาทั้งหมด) จึงสามารถรีเซ็ตได้ตลอดเวลา
- เอาต์พุต : สัญญาณเอาต์พุตจากแลตช์จะตามด้วยวงจรเอาต์พุตที่มี ไดรเวอร์เอาต์พุต แบบพุชพูลซึ่งสามารถจ่ายกระแสได้สูงสุด 200 mA สำหรับตัวจับเวลาแบบไบโพลาร์ และต่ำกว่าสำหรับตัวจับเวลาแบบ CMOS
- การคายประจุ : นอกจากนี้ เอาต์พุตของวงจรล็อคยังควบคุมทรานซิสเตอร์ที่ทำหน้าที่เป็นสวิตช์อิเล็กทรอนิกส์ซึ่งเชื่อมต่อ DISCHARGE กับกราวด์
![แผนภาพบล็อกภายใน 555[1]](//upload.wikimedia.org/wikipedia/commons/thumb/1/17/NE555_Bloc_Diagram.svg/500px-NE555_Bloc_Diagram.svg.png) แผนภาพบล็อกภายใน 555 [ 1 ]
แผนภาพบล็อกภายใน 555 [ 1 ] แผนผังวงจรภายใน 555 เวอร์ชันไบโพลาร์
แผนผังวงจรภายใน 555 เวอร์ชันไบโพลาร์ แผนผังวงจรภายในของ 555 เวอร์ชัน CMOS
แผนผังวงจรภายในของ 555 เวอร์ชัน CMOS
![แผนภาพบล็อกภายใน 555[1]](https://upload.wikimedia.org/wikipedia/commons/thumb/1/17/NE555_Bloc_Diagram.svg/500px-NE555_Bloc_Diagram.svg.png)


พินเอาต์
ตารางต่อไปนี้แสดง การต่อขาของตัวจับเวลา 555 แบบ 8 ขา[ 1 ]และตัวจับเวลาคู่ 556 แบบ 14 ขา[ 21 ]เนื่องจาก 556 นั้นเป็นตัวจับเวลา 555 สองตัวที่ใช้ขาจ่ายไฟร่วมกัน หมายเลขขาของแต่ละครึ่งจึงถูกแบ่งออกเป็นสองคอลัมน์[ 2 ]
| 555 พิน# | 556 (หน่วยที่ 1) | 556 (หน่วยที่ 2) | ชื่อพิน | ทิศทางของพิน | คำอธิบายพิน[ 1 ] [ 21 ] [ 2 ] |
|---|---|---|---|---|---|
| 1 | 7 | ก.น. | พลัง | แหล่งจ่ายไฟกราวด์: พินนี้คือ แรงดันอ้างอิง กราวด์ (ศูนย์โวลต์) [ 22 ] | |
| 2 | 6 | 8 | สิ่งกระตุ้น | ป้อนข้อมูล | ท ริกเกอร์: เมื่อV TRIGGERลดลงต่ำกว่า1/2 V CONTROL ( 1/3 V CC ยกเว้นเมื่อ CONTROL ถูกขับเคลื่อนด้วยสัญญาณภายนอก) OUTPUT จะอยู่ในสถานะสูงและช่วงเวลาการจับเวลาจะเริ่มต้นขึ้น[ 22 ]ตราบใดที่ TRIGGER ยังคงมีแรงดันต่ำ OUTPUT ก็จะยังคงอยู่ในสถานะสูง |
| 3 | 5 | 9 | เอาต์พุต | เอาต์พุต | เอาต์พุต: ขานี้เป็น เอาต์พุต แบบพุชพูล (PP) ซึ่งสามารถส่งสัญญาณไปยังสถานะต่ำ (GND) หรือสถานะสูง ( VCC ลบ ประมาณ 1.7 โวลต์สำหรับตัวจับเวลาแบบไบโพลา ร์หรือVCCสำหรับตัวจับเวลาแบบ CMOS) |
| 4 | 4 | 10 | รีเซ็ต | ป้อนข้อมูล | รีเซ็ต: ช่วงเวลาการจับเวลาอาจถูกรีเซ็ตโดยการขับพินนี้ไปที่ GND แต่การจับเวลาจะไม่เริ่มต้นใหม่จนกว่าพินนี้จะมีแรงดันไฟฟ้าสูงกว่าประมาณ 0.7 โวลต์ พินนี้จะแทนที่TRIGGERซึ่งจะแทนที่ THRESHOLD หากไม่ได้ใช้พินนี้ ควรเชื่อมต่อกับVCC เพื่อป้องกัน ไม่ให้สัญญาณรบกวนทางไฟฟ้าทำให้เกิดการรีเซ็ตโดยไม่ได้ตั้งใจ[ 23 ] [ 22 ] |
| 5 | 3 | 11 | ควบคุม | ป้อนข้อมูล | การควบคุม: พินนี้ช่วยให้เข้าถึงตัวแบ่งแรงดัน ภายใน ( 2/3 V CCโดยค่าเริ่มต้น) โดยการจ่ายแรงดันไปยังพินนี้ คุณลักษณะด้านเวลาสามารถเปลี่ยนแปลงได้ ในโหมดอะสเตเบิล พินนี้สามารถใช้เพื่อปรับความถี่ของสถานะเอาต์พุตได้[ 16 ]หากไม่ ได้ใช้พินนี้ ควรเชื่อมต่อกับตัวเก็บประจุแยกสัญญาณ 10 nF (ระหว่างพินนี้กับ GND) เพื่อให้แน่ใจว่าสัญญาณรบกวนทางไฟฟ้าจะไม่ส่งผลกระทบต่อตัวแบ่งแรงดันภายใน[ 2 ] [ 23 ] [ 22 ] |
| 6 | 2 | 12 | เกณฑ์ | ป้อนข้อมูล | เกณฑ์: เมื่อแรงดันไฟฟ้าที่ขาพินนี้มากกว่าV CONTROL ( 2/3 V CC ตามค่าเริ่มต้น ยกเว้นเมื่อ CONTROL ถูกขับเคลื่อนด้วยสัญญาณภายนอก) ช่วงเวลาการจับเวลาสถานะสูง ของ OUTPUT จะสิ้นสุดลง ทำให้ OUTPUT เปลี่ยนไปเป็นสถานะต่ำ[ 22 ] |
| 7 | 1 | 13 | การปล่อยตัว | เอาต์พุต | การคายประจุ: ขานี้เป็น เอาต์พุต แบบ open-collector (OC) สำหรับตัวจับเวลาแบบไบโพลาร์ หรือเอาต์พุตแบบ open-drain (OD) สำหรับตัวจับเวลา CMOS ขานี้สามารถใช้เพื่อคายประจุตัว เก็บประจุ เมื่อ OUTPUT ต่ำ ในโหมดแลตช์แบบไบสเตเบิลและอินเวอร์เตอร์แบบไบสเตเบิล ขานี้จะไม่ได้ใช้งาน ซึ่งทำให้สามารถใช้เป็นเอาต์พุตสำรองได้[ 22 ] |
| 8 | 14 | วีซีซี | พลัง | แหล่งจ่ายไฟบวก: สำหรับตัวจับเวลาแบบไบโพลาร์ ช่วงแรงดันไฟฟ้าของแหล่งจ่ายไฟโดยทั่วไปคือ 4.5 ถึง 16 โวลต์ (บางรุ่นระบุให้ใช้ได้ถึง 18 โวลต์ แต่ส่วนใหญ่จะทำงานได้ต่ำสุดที่ 3 โวลต์) สำหรับตัวจับเวลา CMOS ช่วงแรงดันไฟฟ้าของแหล่งจ่ายไฟโดยทั่วไปคือ 2 ถึง 15 โวลต์ (บางรุ่นระบุให้ใช้ได้ถึง 18 โวลต์ และบางรุ่นระบุให้ใช้ได้ต่ำสุดที่ 1 โวลต์) ดูคอลัมน์แรงดันไฟฟ้าต่ำสุดและสูงสุดในตารางอนุพันธ์ในบทความนี้ โดยทั่วไปจะใช้ตัว เก็บประจุแยกสัญญาณ (ระหว่างขาพินนี้กับ GND) เป็นวิธีปฏิบัติที่ดี[ 24 ] [ 23 ] | |
![แผนผังขาของตัวจับเวลาเดี่ยว 555[1][2]](https://upload.wikimedia.org/wikipedia/commons/thumb/c/c7/555_Pinout.svg/250px-555_Pinout.svg.png)
![แผนผังขาของตัวจับเวลาคู่ 556[21][2]](https://upload.wikimedia.org/wikipedia/commons/thumb/d/d8/NE556_pennen.svg/250px-NE556_pennen.svg.png)
โหมดต่างๆ
ไอซี 555 มีโหมดการทำงานดังต่อไปนี้:
- โหมด อะสเตเบิล (ทำงานอิสระ) – ไอซี 555 ทำงานเหมือนออสซิเลเตอร์อิเล็กทรอนิกส์การใช้งานได้แก่:
- ในฐานะออสซิลเลเตอร์หรือ นาฬิกา /ตัวจับเวลาแบบ คาบทั่วไปซึ่งสามารถนำไปใช้ได้หลายอย่าง เช่น ไฟกระพริบ ของไดโอดเปล่งแสงและหลอดไฟการสร้างพัลส์การปรับความกว้างพัลส์ (PWM) นาฬิกาตรรกะ การสร้างเสียง สัญญาณเตือนภัยการมอดูเลตตำแหน่งพัลส์เป็นต้น
- การแปลงสัญญาณอนาล็อกเป็นดิจิทัล (ADC) จากค่าอนาล็อกที่แสดงด้วยความต้านทานหรือความจุ ไปเป็นความยาวพัลส์ดิจิทัล
- ตัวอย่างเช่น การเลือกใช้เทอร์มิสเตอร์เป็นตัวต้านทานกำหนดเวลาทำให้สามารถใช้ไอซี 555 ในเซ็นเซอร์วัดอุณหภูมิ ได้ โดยที่คาบของพัลส์เอาต์พุตจะถูกกำหนดโดยอุณหภูมิจากนั้นไมโครโปรเซสเซอร์สามารถแปลงคาบของพัลส์เป็นอุณหภูมิ ปรับให้เป็นเชิงเส้น และแม้กระทั่งทำการสอบเทียบได้
- โหมด โมโนสเตเบิล (แบบช็อตเดียว) – ไอซี 555 ทำงานเป็นตัวสร้างพัลส์แบบ "ช็อตเดียว" การใช้งานได้แก่:
- ตัวจับเวลา, การตรวจจับพัลส์ที่ขาดหาย, สวิตช์ที่ไม่กระเด้ง, สวิตช์สัมผัส, ตัวแบ่งความถี่, การวัดความต้านทานหรือความจุแบบทริกเกอร์, PWM เป็นต้น
- โหมด ไบสเตเบิล (แลตช์) – ไอซี 555 ทำงานเป็นแลตช์แบบตั้งค่า-รีเซ็ตการใช้งานได้แก่:
- โหมด Schmitt trigger (อินเวอร์เตอร์) – วงจร 555 ทำงานเป็นเกตอินเวอร์เตอร์ Schmitt trigger การใช้งาน:
- แปลงสัญญาณรบกวนขาเข้าให้เป็นสัญญาณดิจิทัลขาออกที่สะอาด
แอสเทเบิล


| ความถี่ | ซี | อาร์1 | อาร์2 | รอบการทำงาน |
|---|---|---|---|---|
| 0.1 เฮิรตซ์ (+0.048%) | 100 μF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 1 เฮิรตซ์ (+0.048%) | 10 μF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 10 เฮิรตซ์ (+0.048%) | 1 μF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 100 เฮิรตซ์ (+0.048%) | 100 นาโนฟารัด | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 1 kHz (+0.048%) | 10 nF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 10 kHz (+0.048%) | 1 nF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
| 100 kHz (+0.048%) | 100 pF | 8.2 กิโลโอห์ม | 68 กิโลโอห์ม | 52.8% |
ในการกำหนดค่าแบบอะสเตเบิล ตัวจับเวลา 555 จะส่งสัญญาณพัลส์รูปสี่เหลี่ยมผืนผ้าอย่างต่อเนื่องโดยมีช่วงเวลาที่กำหนดไว้
วงจรแอสเตเบิลถูกสร้างขึ้นโดยใช้ตัวต้านทานสองตัวและตัวเก็บประจุหนึ่งตัว ขาเกณฑ์และขาทริกเกอร์เชื่อมต่อกับตัวเก็บประจุ ดังนั้นจึงมีแรงดันไฟฟ้าเท่ากัน



วงจรการทำงานซ้ำๆ (โดยเริ่มจากตัวเก็บประจุที่ไม่มีประจุ) มีดังนี้:
- เนื่องจากแรงดันของตัวเก็บประจุจะต่ำกว่า1/3 V CC ขาทริกเกอร์ จะ ทำให้แลตช์ภายใน ของ 555 เปลี่ยนสถานะ ส่งผลให้ OUT เป็นค่าสูง และทรานซิสเตอร์คายประจุภายในตัดการทำงาน
- เนื่องจากขาปล่อยประจุไม่ได้ลัดวงจรลงกราวด์อีกต่อไป ตัวเก็บประจุจึงเริ่มชาร์จผ่านกระแสจาก Vcc ผ่านตัวต้านทานและ
- เมื่อประจุในตัวเก็บประจุถึง2/3 Vcc ขา เกณฑ์จะทำให้แลตช์ภายในของ 555 เปลี่ยนสถานะ ส่งผลให้ OUT เป็นระดับต่ำ และทรานซิสเตอร์คายประจุภายในเข้าสู่โหมดอิ่มตัว (ค่าการนำไฟฟ้าสูงสุด)
- ทรานซิสเตอร์ปล่อยประจุนี้ทำหน้าที่เป็นเส้นทางปล่อยประจุ ดังนั้นตัวเก็บประจุจึงเริ่มปล่อยประจุผ่านทางทรานซิสเตอร์นี้
- เมื่อ แรงดันของตัวเก็บประจุลดลงต่ำกว่า1/3 V CCวงจรจะเริ่มต้นใหม่ตั้งแต่ขั้นตอนที่1

ในพัลส์แรก ตัวเก็บประจุจะชาร์จจาก 0 V ถึง2/3 V CC แต่ในพัลส์ต่อๆ มา จะชาร์จเพียงจาก 1/3 V CC ถึง 2/3 V CC เท่านั้นดังนั้นพัลส์แรกจึง มีช่วงเวลาที่ แรง ดันสูงกว่าพัลส์ต่อๆ มา นอกจาก นี้ ตัวเก็บประจุจะชาร์จผ่านตัวต้านทานทั้งสองตัว แต่ จะคายประจุผ่านตัวต้านทานเพียงตัวเดียว ดังนั้น ช่วงเวลาที่แรงดันสูงจึงยาวกว่าช่วงเวลาที่แรงดันต่ำ ดังแสดงในสมการต่อไปนี้:
ช่วงเวลาเอาต์พุตสูงของแต่ละพัลส์กำหนดโดย: [ 16 ]

ช่วงเวลาเอาต์พุตต่ำของแต่ละพัลส์กำหนดโดย: [ 16 ]

ดังนั้นความถี่ ของพัลส์จึงกำหนดโดย: [ 16 ]


และรอบการทำงาน จะกำหนดโดย: [ 16 ]


โดยที่คือเวลาในหน่วยวินาทีคือความต้านทานในหน่วยโอห์มคือความจุในหน่วยฟารัดและคือ ค่า คงที่ลอการิทึมธรรมชาติของ 2 [ a ]




ข้อกำหนดเกี่ยว กับตัวต้านทาน:
- ความต้านทานขั้นต่ำ - แนะนำให้ใช้ความต้านทานขั้นต่ำ 5 กิโลโอห์มแต่ไม่ได้หมายความว่าไม่สามารถใช้ค่าที่ต่ำกว่าที่เหมาะสมได้ในบางแอปพลิเคชัน[ 2 ] [ 25 ]
- ความต้านทานสูงสุด - ต้องใช้กระแสเกณฑ์ขั้นต่ำ 0.25 ไมโครแอมป์ เพื่อกระตุ้นตัวเปรียบเทียบเกณฑ์ของตัวจับเวลา NE555 ดังนั้นความต้านทาน ควรจำกัดไว้ที่ 6.6 เมกะโอห์มเมื่อ แรงดันไฟ 5 โวลต์หรือ 20 เมกะโอห์มเมื่อแรงดันไฟ 15 โวลต์[ 2 ] [ 25 ] หากตัวเก็บประจุมีกระแสรั่วไหล มาก ความต้านทานสูงสุดจะต้องลดลงเพื่อเพิ่มกระแสประจุ มิฉะนั้นจะไม่สามารถชาร์จตัวเก็บประจุได้[ 2 ] [ 25 ]

รอบการทำงานที่สั้นลง
เพื่อสร้างเอาต์พุตที่มีช่วงเวลาสูงที่สั้นกว่าช่วงเวลาต่ำ (เช่นรอบการทำงานน้อยกว่า 50%) สามารถวาง ไดโอดความเร็วสูง (เช่น ไดโอดสัญญาณ 1N4148 ) ขนานกับ R 2โดยให้แคโทดอยู่ด้านตัวเก็บประจุ[ 16 ]ซึ่งจะบายพาส R 2ในช่วงสูงของรอบ ดังนั้นช่วงเวลาสูงจึงขึ้นอยู่กับ R 1และ C เท่านั้น โดยมีการปรับตามแรงดันตกคร่อมไดโอด ช่วงเวลาต่ำจะไม่ได้รับผลกระทบจากไดโอดและยังคงอยู่ แต่ แรงดันตกคร่อมไปข้างหน้าของไดโอดV diodeจะทำให้การชาร์จบนตัวเก็บประจุช้าลง ดังนั้นช่วงเวลาสูงจึงนานกว่าที่มักอ้างถึง



โดยที่V diode คือ ค่าเมื่อกระแส "เปิด" ของไดโอดเท่ากับ1/2 ของ V CC / R 1 (ซึ่งขึ้นอยู่กับชนิดของไดโอดและสามารถดูได้จากเอกสารข้อมูลหรือวัดค่าได้) เมื่อ V diodeมีค่าน้อยเมื่อเทียบกับV ccการชาร์จจะเร็วขึ้นและเข้าใกล้ค่าแต่จะช้าลงเมื่อ V diodeมีค่าใกล้เคียงกับV cc มาก ขึ้น
ตัวอย่างสุดขั้ว เมื่อV CC = 5 V และ V diode = 0.7 V เวลาที่เกิดกระแสสูงคือ 1.00 R 1 C ซึ่งยาวกว่าค่าที่ "คาดไว้" 0.693 R 1 C ถึง 45% ในทางกลับกัน เมื่อV cc = 15 V และ V diode = 0.3 V เวลาที่เกิดกระแสสูงคือ 0.725 R 1 C ซึ่งใกล้เคียงกับค่าที่คาดไว้ 0.693 R 1 C สมการจะเข้าใกล้ 0.693 R 1 C เมื่อV diodeเข้าใกล้ 0 V
การมอดูเลชั่นความกว้างพัลส์
ในแผนผังวงจรตัวอย่างก่อนหน้านี้ ขาควบคุมไม่ได้ถูกใช้งาน ดังนั้นจึงควรต่อลงกราวด์ผ่าน ตัวเก็บประจุแยกสัญญาณ ขนาด 10 nF เพื่อลดสัญญาณรบกวนทางไฟฟ้า อย่างไรก็ตาม หากมีการจ่ายแรงดันแหล่งจ่ายที่เปลี่ยนแปลงตามเวลาไปยังขาควบคุม ความกว้างของพัลส์ก็จะถูกปรับเปลี่ยนโดยแรงดันควบคุมนั้น
ถ้าแรงดันควบคุมที่ขา 5, Vcเปลี่ยนแปลง, t จะสูง , t จะต่ำ , ความถี่ และรอบการทำงานก็จะเปลี่ยนแปลงไปด้วย ผลลัพธ์ที่ได้คือ การมอดูเลชั่นความกว้างพัล ส์ (Pulse-width modulation ) แรงดันเกณฑ์ (Threshold voltage) ถูกตั้งค่าไว้ที่แรงดันควบคุมที่ขา 5, Vc แรงดัน ท ริกเกอร์( Trigger voltage )ถูกตั้งค่าไว้ที่1/2 Vcเงื่อนไขที่จำเป็นสำหรับการเกิดการสั่น คือ Vc > Vcmin





แรงบิดของมอเตอร์ DC เป็นสัดส่วนกับกระแสไฟฟ้า และค่าความเหนี่ยวนำของขดลวดเป็นตัวกำหนดแบบจำลองทางไฟฟ้าหลัก เนื่องจากทรานซิสเตอร์แยกวงจรอยู่ในสภาวะอิ่มตัวหรือตัดการทำงาน จึงใช้พลังงานน้อยมาก พลังงานส่วนใหญ่สูญเสียไปในตัวต้านทานของขดลวด (งานเชิงกล 86%) และไดโอด 14% โปรดสังเกตว่าเมื่อแรงดันควบคุมเพิ่มขึ้นt lowจะลดลงt high , รอบการทำงาน และระยะเวลาการประจุของตัวเหนี่ยวนำจะเพิ่มขึ้น ผลที่ได้คือ กระแสของตัวเหนี่ยวนำจะแปรผันตามแรงดันควบคุมโดยถูกจำกัดด้วยระลอกคลื่น
 รูปคลื่นการปรับความกว้างพัลส์ที่ควบคุมด้วยแรงดันไฟฟ้า
รูปคลื่นการปรับความกว้างพัลส์ที่ควบคุมด้วยแรงดันไฟฟ้า แผนผังวงจรการปรับความกว้างพัลส์ที่ควบคุมด้วยแรงดันไฟฟ้าสำหรับการควบคุมแรงบิดของมอเตอร์กระแสตรง
แผนผังวงจรการปรับความกว้างพัลส์ที่ควบคุมด้วยแรงดันไฟฟ้าสำหรับการควบคุมแรงบิดของมอเตอร์กระแสตรง


ก่อนวงจรรวมแหล่งจ่ายไฟแบบสวิตช์โหมดตัวแรกในปี 1976 SG1524 [ 26 ]และแม้กระทั่งหลังจากที่ชิปดังกล่าว เช่น LT1070 ในปี 1987 มีจำหน่ายในราคาประหยัดในช่วงปลายทศวรรษ 1980 [ 27 ]การใช้งาน 555 ในยุคแรกคือ ตัว ควบคุมแรงดันไฟฟ้าแบบสวิตช์โหมด[ 28 ] [ 29 ]ส่วนประกอบกำหนดเวลาจะถูกเลือกสำหรับช่วงรอบการทำงานที่เพียงพอสำหรับขีดจำกัดโหลดกระแส แรงดันควบคุมจะเป็นเอาต์พุตของข้อผิดพลาดแรงดันไฟฟ้าที่ขยายด้วยอัตราขยายคงที่
 วงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง (โหลดต่ำสุด) แรงดันควบคุม 0.75V อัตราการทำงาน 30% ในช่วงt สูง (13us) ตัวเหนี่ยวนำจะชาร์จกระแส 0.65A ผ่านทรานซิสเตอร์ที่อิ่มตัว ในช่วง 5.6us ตัวเหนี่ยวนำจะคายประจุผ่านไดโอดเพื่อชาร์จตัวเก็บประจุให้เต็ม ในช่วง 24us ที่เหลือในt ต่ำ (32us) ตัวเหนี่ยวนำจะคายประจุอย่างต่อเนื่อง
วงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง (โหลดต่ำสุด) แรงดันควบคุม 0.75V อัตราการทำงาน 30% ในช่วงt สูง (13us) ตัวเหนี่ยวนำจะชาร์จกระแส 0.65A ผ่านทรานซิสเตอร์ที่อิ่มตัว ในช่วง 5.6us ตัวเหนี่ยวนำจะคายประจุผ่านไดโอดเพื่อชาร์จตัวเก็บประจุให้เต็ม ในช่วง 24us ที่เหลือในt ต่ำ (32us) ตัวเหนี่ยวนำจะคายประจุอย่างต่อเนื่อง วงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง (โหลดสูงสุด) แรงดันควบคุม 2.6V อัตราการทำงาน 70% ในช่วงเวลาt สูง (68us) ตัวเหนี่ยวนำจะชาร์จกระแส 3.27mA ผ่านทรานซิสเตอร์ที่อิ่มตัว ในช่วงเวลา 32us ตัวเหนี่ยวนำจะคายประจุผ่านไดโอดเพื่อชาร์จตัวเก็บประจุจนเต็ม ไม่มีเวลาเหลือในt ต่ำ (32us) ดังนั้นจึงไม่สามารถเพิ่มโหลดได้อีกต่อไป
วงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง (โหลดสูงสุด) แรงดันควบคุม 2.6V อัตราการทำงาน 70% ในช่วงเวลาt สูง (68us) ตัวเหนี่ยวนำจะชาร์จกระแส 3.27mA ผ่านทรานซิสเตอร์ที่อิ่มตัว ในช่วงเวลา 32us ตัวเหนี่ยวนำจะคายประจุผ่านไดโอดเพื่อชาร์จตัวเก็บประจุจนเต็ม ไม่มีเวลาเหลือในt ต่ำ (32us) ดังนั้นจึงไม่สามารถเพิ่มโหลดได้อีกต่อไป แผนผังวงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง เมื่อVoutเพิ่มขึ้น แรงดันไฟฟ้าของทรานซิสเตอร์ป้อนกลับจะเพิ่มขึ้นผ่านวงจรตัวต้านทานแบบขั้นบันได ซึ่งจะลดแรงดันควบคุมและรอบการทำงานเพื่อลดVout Vout จะถูกรักษาไว้ ที่ 5% แม้ว่าโหลดจะเปลี่ยนแปลงไปถึง 10 เท่า ตัวเก็บประจุป้อนกลับจะทำให้เกิดการเลื่อนเฟสเพื่อป้องกัน การสั่นของสัญญาณป้อนกลับ ตัวเก็บประจุจะจำกัดริปเปิลไว้ที่ 1.3% เมื่อแรงดันไฟฟ้าแหล่งจ่ายเปลี่ยนจาก 5V เป็น 12V วงจรป้อนกลับที่มีรอบการทำงานเท่าเดิมจะลด การเปลี่ยนแปลง ของVoutเหลือ 2V
แผนผังวงจรควบคุมแรงดันไฟฟ้าแบบสวิตชิ่ง เมื่อVoutเพิ่มขึ้น แรงดันไฟฟ้าของทรานซิสเตอร์ป้อนกลับจะเพิ่มขึ้นผ่านวงจรตัวต้านทานแบบขั้นบันได ซึ่งจะลดแรงดันควบคุมและรอบการทำงานเพื่อลดVout Vout จะถูกรักษาไว้ ที่ 5% แม้ว่าโหลดจะเปลี่ยนแปลงไปถึง 10 เท่า ตัวเก็บประจุป้อนกลับจะทำให้เกิดการเลื่อนเฟสเพื่อป้องกัน การสั่นของสัญญาณป้อนกลับ ตัวเก็บประจุจะจำกัดริปเปิลไว้ที่ 1.3% เมื่อแรงดันไฟฟ้าแหล่งจ่ายเปลี่ยนจาก 5V เป็น 12V วงจรป้อนกลับที่มีรอบการทำงานเท่าเดิมจะลด การเปลี่ยนแปลง ของVoutเหลือ 2V



โมโนสเตเบิล


โหมดโมโนสเตเบิ ลสร้างพัลส์เอาต์พุตเมื่อสัญญาณทริกเกอร์ลดลงต่ำกว่า 1/3 V CC วงจรRCจะกำหนดระยะเวลาของพัลส์เอาต์พุตเป็นเวลาเป็นวินาทีที่ใช้ ใน การชาร์จ C ให้เป็น2/3 V CC : [ 16 ]

โดยที่ความต้านทานมีหน่วย เป็น โอห์มความจุมีหน่วยเป็นฟารัดและ ค่าคง ที่ ลอการิทึม ธรรมชาติของ 3 [ b ] ระยะเวลาของพัลส์เอาต์พุตสามารถยืดหรือหดได้ตามต้องการโดยการปรับค่าของ R และ C การกระตุ้นครั้งถัดไปก่อนสิ้นสุดช่วงเวลานี้จะไม่ส่งผลต่อพัลส์เอาต์พุต[ 30 ]

ค่าตัวอย่าง
| เวลา | ซี | อาร์ |
|---|---|---|
| 100 ไมโครวินาที (−0.026%) | 1 nF | 91 กิโลโอห์ม |
| 1 มิลลิวินาที (−0.026%) | 10 nF | 91 กิโลโอห์ม |
| 10 มิลลิวินาที (−0.026%) | 100 นาโนฟารัด | 91 กิโลโอห์ม |
| 100 มิลลิวินาที (−0.026%) | 1 μF | 91 กิโลโอห์ม |
| 1 วินาที (−0.026%) | 10 μF | 91 กิโลโอห์ม |
| 10 วินาที (−0.026%) | 100 μF | 91 กิโลโอห์ม |
ตารางเวลา (ด้านขวา) แสดงค่าส่วนประกอบอิเล็กทรอนิกส์ทั่วไปที่ใช้แก้ปัญหาเรื่องเวลาของเลขยกกำลัง 10 ต่างๆ
การปรับขนาด R และ C ด้วยกำลังของ 10 ที่ตรงข้ามกัน จะให้จังหวะเวลาเดียวกัน ตัวอย่างเช่น:
- 1 มิลลิวินาที≅ 1 นาโนฟารัด และ 910 กิโลโอห์ม
- 1 มิลลิวินาที ≈ 10 นาโนฟารัด และ 91 กิโล โอห์ม(ค่าจากตาราง)
- 1 มิลลิวินาที ≈ 100 นาโนฟารัด และ 9.1 กิโลโอห์ม
สำหรับแต่ละแถวในตารางตัวอย่าง (ด้านขวา) สามารถสร้างค่าเวลาเพิ่มเติมได้ง่ายๆ โดยการเพิ่มตัวต้านทานที่มีค่าเดียวกันหนึ่งถึงสามตัวแบบขนานและ/หรือแบบอนุกรม หากต่อตัวต้านทานตัวที่สองแบบขนาน ค่าเวลาใหม่จะเป็นครึ่งหนึ่งของเวลาในตาราง หากต่อตัวต้านทานตัวที่สองแบบอนุกรม ค่าเวลาใหม่จะเป็นสองเท่าของเวลาในตาราง
- 2.5 มิลลิวินาที (0.25x) ≅ 100 นาโนฟารัด และ 22.75 กิโลโอห์ม (ตัวต้านทาน 91 กิโลโอห์ม สี่ตัว ต่อขนานกัน )
- 5 มิลลิวินาที (0.5x) ≅ 100 นาโนฟารัด และ 45.5 กิโลโอห์ม (ตัวต้านทาน 91 กิโลโอห์มสองตัวต่อขนานกัน)
- 10 มิลลิวินาที (1x) ≅ 100 นาโนฟารัด และ 91 กิโลโอห์ม (ค่าจากตาราง )
- 15 มิลลิวินาที (1.5x) ≅ 100 นาโนฟารัด และ 136.5 กิโลโอห์ม (ตัวต้านทาน 91 กิโลโอห์มหนึ่งตัวต่ออนุกรมกับ " ตัวต้านทาน 91 กิโลโอห์มสองตัวต่อขนาน")
- 20 มิลลิวินาที (2x) ≅ 100 นาโนฟารัด และ 182 กิโลโอห์ม ( ตัวต้านทาน 91 กิโลโอห์ม สองตัวต่อ อนุกรมกัน )
- 25 มิลลิวินาที (2.5x) ≅ 100 นาโนฟารัด และ 227.5 กิโลโอห์ม (" ตัวต้านทาน 91 กิโลโอห์มสองตัวต่ออนุกรม" ต่ออนุกรมกับ " ตัวต้านทาน 91 กิโลโอห์มสองตัวต่อขนาน")
- 30 มิลลิวินาที (3x) ≅ 100 นาโนฟารัด และ 273 กิโลโอห์ม (ตัวต้านทาน 91 กิโลโอห์มสามตัวต่ออนุกรมกัน)
- 40 มิลลิวินาที (4x) ≅ 100 นาโนฟารัด และ 364 กิโลโอห์ม (ตัวต้านทาน 91 กิโลโอห์มสี่ตัวต่ออนุกรมกัน)
สลัก SR แบบสองสถานะ


วงจรจับเวลา 555 สามารถทำหน้าที่เป็น วงจร แลตช์ SR แบบแอคทีฟ ต่ำ (แม้ว่าจะไม่มี เอาต์พุต Q แบบกลับเฟส ) โดยมีเอาต์พุตสองขา: ขาเอาต์พุตเป็น เอาต์พุต แบบพุช พูล และขาดิสชาร์จเป็น เอาต์พุตแบบ โอเพ่นคอลเลคเตอร์ (ต้องใช้ตัวต้านทานพูลอัพ )
จากแผนผังทางด้านขวาสัญญาณอินพุตReset เชื่อมต่อกับขา RESETและสัญญาณอินพุตSet เชื่อมต่อกับขา TRดังนั้น การดึงขาSetลงต่ำชั่วขณะจะทำหน้าที่เป็น "การตั้งค่า" และเปลี่ยนสถานะเอาต์พุตเป็นสูง ( VCC )ในทางกลับกัน การดึงขาResetลงต่ำชั่วขณะจะทำหน้าที่เป็น "การรีเซ็ต" และเปลี่ยนสถานะขา Out เป็นต่ำ (GND)
ไม่จำเป็นต้องใช้ตัวเก็บประจุเวลาในการกำหนดค่าแบบไบสเตเบิล อินพุตเกณฑ์จะต่อลงกราวด์เนื่องจากไม่ได้ใช้งาน[ 31 ]อินพุตทริกเกอร์และรีเซ็ตอาจถูกยึดไว้ที่ระดับสูงผ่านตัวต้านทานพูลอัพหากปกติแล้วเป็นHi-Zและเปิดใช้งานได้เฉพาะเมื่อเชื่อมต่อกับกราวด์เท่านั้น
เกตอินเวอร์เตอร์ Schmitt trigger แบบสองสถานะ


สามารถใช้ตัวจับเวลา 555 สร้างวงจรเกตอินเวอร์เตอร์แบบSchmitt trigger ที่มีเอาต์พุตสองขาได้ โดยขาเอาต์พุตเป็น เอาต์พุต แบบพุชพูลและขาดิสชาร์จเป็น เอาต์พุตแบบ โอเพ่นคอลเลคเตอร์ (ต้องใช้ตัวต้านทานพูลอัพ )
สำหรับแผนผังทางด้านขวา สัญญาณอินพุตจะถูกต่อแบบ ACผ่านตัวเก็บประจุอนุกรมค่าต่ำ จากนั้นจึงไบแอสด้วยตัวต้านทานความต้านทานสูงที่เหมือนกันซึ่งทำให้สัญญาณมีจุดศูนย์กลางอยู่ที่1/2 V CCสัญญาณที่มีจุดศูนย์กลางนี้จะเชื่อมต่อกับขาอินพุตทริกเกอร์และเกณฑ์ของตัวจับเวลา สัญญาณอินพุตต้องมีความแรงเพียงพอที่จะกระตุ้นระดับทริกเกอร์ของตัวเปรียบเทียบให้เกินเกณฑ์ 1/3 V CC ที่ต่ำกว่าและ 2/3 V CC ที่สูงกว่าเพื่อทำให้พวกมันเปลี่ยนสถานะ จึงทำให้เกิดคุณสมบัติทริกเกอร์Schmitt [ 32 ]
ในวงจรไบสเตเบิล ไม่จำเป็นต้องใช้ตัวเก็บประจุสำหรับกำหนดเวลา
แพ็คเกจ

ในปี พ.ศ. 2515 Signeticsได้วางจำหน่ายตัวจับเวลา 555 ในแพ็คเกจโลหะDIP -8 และTO5-8 และตัวจับเวลา 556 วางจำหน่ายในแพ็คเกจ DIP-14 [ 4 ]
ในปี พ.ศ. 2549 ตัวจับเวลาคู่ 556 มีจำหน่ายในรูปแบบแพ็คเกจแบบเจาะรูเป็น DIP-14 (ระยะห่าง 2.54 มม.) [ 21 ]และแพ็คเกจแบบติดตั้งบนพื้นผิวเป็น SO-14 (ระยะห่าง 1.27 มม.) และ SSOP-14 (ระยะห่าง 0.65 มม.)
ในปี 2555 555 มีจำหน่ายในรูปแบบแพ็คเกจแบบเจาะรู DIP-8 (ระยะห่าง 2.54 มม.) [ 33 ]และแพ็คเกจแบบติดตั้งบนพื้นผิว SO-8 (ระยะห่าง 1.27 มม.), SSOP-8 / TSSOP -8 / VSSOP-8 (ระยะห่าง 0.65 มม.), BGA (ระยะห่าง 0.5 มม.) [ 1 ]
MIC1555 เป็น ตัวจับเวลา CMOSชนิด 555 ที่มีขาจำนวนน้อยกว่า 3 ขา สามารถใช้งานได้ในแพ็คเกจแบบติดตั้งบนพื้นผิวSOT23 -5 (ระยะห่าง 0.95 มม.) [ 34 ]
ข้อกำหนด

ข้อกำหนดเหล่านี้ใช้กับ NE555 แบบไบโพลาร์ดั้งเดิมเท่านั้น ตัวจับเวลา 555 รุ่นอื่นๆ อาจมีข้อกำหนดที่แตกต่างกันไปขึ้นอยู่กับเกรด (อุตสาหกรรม การทหาร การแพทย์ ฯลฯ)
| หมายเลขชิ้นส่วน | NE555 |
| กระบวนการ IC | ไบโพลาร์ |
| แรง ดันไฟฟ้าแหล่งจ่าย ( VCC ) | 4.5 ถึง 16 โวลต์ |
| กระแสไฟเลี้ยง ( V CC = +5 V) | 3 ถึง 6 มิลลิแอมป์ |
| กระแสไฟเลี้ยง ( V CC = +15 V) | 10 ถึง 15 มิลลิแอมป์ |
| กระแสเอาต์พุต (สูงสุด) | 200 มิลลิแอมป์ |
| การกระจายพลังงานสูงสุด | 600 มิลลิวัตต์ |
| การใช้พลังงาน (ขณะทำงานขั้นต่ำ) | 30 มิลลิวัตต์ ที่ 5 โวลต์, 225 มิลลิวัตต์ ที่ 15 โวลต์ |
| อุณหภูมิในการทำงาน | 0 ถึง 70 องศาเซลเซียส |
อนุพันธ์
ในช่วงหลายทศวรรษที่ผ่านมา มีบริษัทจำนวนมากผลิตตัวจับเวลาแบบ 555, 556 และ 558 ในรูปแบบต่างๆ กัน โดยใช้หมายเลขชิ้นส่วนที่แตกต่างกันมากมาย รายการต่อไปนี้เป็นเพียงส่วนหนึ่งเท่านั้น:
| ผู้ผลิต | หมายเลขชิ้นส่วน | สถานะการผลิต | กระบวนการIC | ตัวจับเวลาทั้งหมด | แรงดันไฟฟ้าขั้นต่ำ ( โวลต์ ) | แรงดันไฟฟ้าสูงสุด (โวลต์) | กระแส I q ( μA )ที่แรงดันไฟเลี้ยง 5 V | ความถี่สูงสุด ( MHz ) | หมายเหตุ | เอกสารข้อมูลทางเทคนิค |
|---|---|---|---|---|---|---|---|---|---|---|
| โซลูชันซิลิคอนแบบกำหนดเอง (CSS) | CSS555 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 1.2 | 5.5 | 4.3 | 1.0 | EEPROMภายในต้องใช้โปรแกรมเมอร์ | [ 35 ] [ 36 ] [ 37 ] |
| บริษัท ไดโอดส์ อิงค์ | ZSCT1555 | เลิกผลิตแล้ว | ไบโพลาร์ | 1 | 0.9 | 6 | 150 | 0.33 | ออกแบบโดยฮันส์ คาเมนซินด์ | [ 38 ] |
| บริษัทวิทยุญี่ปุ่น (JRC) | NJM555 | เลิกผลิตแล้ว | ไบโพลาร์ | 1 | 4.5 | 16 | 3000 | 0.1* | มีจำหน่ายใน รูปแบบแพ็คเกจ SIP -8 ด้วยเช่นกัน | [ 33 ] |
| ไมโครชิป | MIC1555/7 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1* | 2.7 | 18 | 240 | 5.0* | ลดจำนวนขาและคุณสมบัติ (เฉพาะโหมดแอสเตเบิลและโมโนสเตเบิล และไม่มีรีเซ็ตสำหรับ MIC1555 โหมดแอสเตเบิลเท่านั้นสำหรับ MIC1557) มีจำหน่ายเฉพาะในแพ็คเกจSOT23-5 , TSOT23-5 และUTDFN -10 เท่านั้น | [ 34 ] |
| บน | เอ็มซี1455 | คล่องแคล่ว | ไบโพลาร์ | 1 | 4.5 | 16 | 3000 | 0.1* | — | [ 39 ] |
| เรเนซัส | ไอซีเอ็ม7555 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 2 | 18 | 40 | 1.0 | [ 17 ] | |
| เรเนซัส | ไอซีเอ็ม7556 | คล่องแคล่ว | เคมี คอมโพสิสโม | 2 | 2 | 18 | 80 | 1.0 | [ 17 ] | |
| ซิกเนติกส์ | NE555 | แอคทีฟ (TI) | ไบโพลาร์ | 1 | 4.5 | 16 | 3000 | 0.1* | ตัวจับเวลา 555 ตัวแรกแพ็คเกจDIP - 8 หรือTO5-8 | [ 4 ] [ 16 ] [ 25 ] [ 2 ] |
| ซิกเนติกส์ | NE556 | แอคทีฟ (TI) | ไบโพลาร์ | 2 | 4.5 | 16 | 6000 | 0.1* | ตัวจับเวลา 556 ตัวแรกแพ็คเกจ DIP-14 | [ 16 ] [ 2 ] |
| ซิกเนติกส์ | NE558 | เลิกผลิตแล้ว | ไบโพลาร์ | 4 ดาว | 4.5 | 16 | 4800* | 0.1* | ตัวจับเวลา 558 ตัวแรกแพ็คเกจ DIP-16 | [ 2 ] |
| บริษัท STMicroelectronics (ST) | ทีเอส555 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 2 | 16 | 110 | 2.7 | — | [ 40 ] |
| บริษัท เท็กซัส อินสตรูเมนต์ (TI) | LM555 | คล่องแคล่ว | ไบโพลาร์ | 1 | 4.5 | 16 | 3000 | ไม่ระบุ | [ 30 ] | |
| เท็กซัส อินสตรูเมนต์ | LM556 | เลิกผลิตแล้ว | ไบโพลาร์ | 2 | 4.5 | 16 | 6000 | 0.1 | [ 41 ] | |
| เท็กซัส อินสตรูเมนต์ | แอลเอ็มซี555 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 1.5 | 15 | 100 | 3.0 | มีจำหน่ายใน รูปแบบแพ็คเกจ DSBGA -8 ด้วยเช่นกัน | [ 18 ] |
| เท็กซัส อินสตรูเมนต์ | NE555 | คล่องแคล่ว | ไบโพลาร์ | 1 | 4.5 | 16 | 3000 | 0.1* | — | [ 1 ] |
| เท็กซัส อินสตรูเมนต์ | NE556 | คล่องแคล่ว | ไบโพลาร์ | 2 | 4.5 | 16 | 6000 | 0.1* | — | [ 21 ] |
| เท็กซัส อินสตรูเมนต์ | ทีแอลซี551 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 1 | 15 | 170 | 1.8 | [ 20 ] | |
| เท็กซัส อินสตรูเมนต์ | ทีแอลซี552 | คล่องแคล่ว | เคมี คอมโพสิสโม | 2 | 1 | 15 | 340 | 1.8 | [ 42 ] | |
| เท็กซัส อินสตรูเมนต์ | ทีแอลซี555 | คล่องแคล่ว | เคมี คอมโพสิสโม | 1 | 2 | 15 | 170 | 2.1 | — | [ 19 ] |
| เท็กซัส อินสตรูเมนต์ | ทีแอลซี556 | คล่องแคล่ว | เคมี คอมโพสิสโม | 2 | 2 | 15 | 340 | 2.1 | — | [ 43 ] |
| เอ็กซ์-เรล | เอ็กซ์ทีอาร์655 | คล่องแคล่ว | โซอิ | 1 | 2.8 | 5.5 | 170 | 4.0 | ทนอุณหภูมิสุดขั้ว (−60 ° Cถึง +230 °C) แพ็คเกจเซรามิก DIP-8 หรือชิปเปล่า | [ 44 ] |
- หมายเหตุตาราง
- ข้อมูลทั้งหมดในตารางด้านบนได้มาจากเอกสารอ้างอิงในคอลัมน์ข้อมูลจำเพาะ ยกเว้นในกรณีที่ระบุไว้เป็นอย่างอื่นด้านล่าง
- สำหรับคอลัมน์ "จำนวนตัวจับเวลาทั้งหมด" เครื่องหมาย "*" หมายถึงชิ้นส่วนที่ไม่มีคุณสมบัติตัวจับเวลา 555
- สำหรับคอลัมน์ " I q " ได้เลือกแหล่งจ่ายไฟ 5 โวลต์เป็นแรงดันไฟฟ้าทั่วไปเพื่อให้เปรียบเทียบได้ง่ายขึ้น ค่าสำหรับ Signetics NE558 เป็นค่าประมาณเนื่องจากเอกสารข้อมูลของ NE558 ไม่ได้ระบุI qที่ 5 V [ 2 ]ค่าที่ระบุในตารางนี้เป็นค่าประมาณโดยการเปรียบเทียบอัตราส่วน 5 V กับ 15 V ของเอกสารข้อมูลไบโพลาร์อื่นๆ จากนั้นจึงลดค่าพารามิเตอร์ 15 V สำหรับชิ้นส่วน NE558 ซึ่งระบุด้วยเครื่องหมาย "*"
- สำหรับคอลัมน์ "ความถี่สูงสุด" เครื่องหมาย "*" หมายถึงค่าที่อาจไม่ใช่ขีดจำกัดความถี่สูงสุดที่แท้จริงของชิ้นส่วนนั้น เอกสารข้อมูล MIC1555 กล่าวถึงข้อจำกัดตั้งแต่ 1 ถึง 5 MHz [ 34 ]แม้ว่าตัวจับเวลาแบบไบโพลาร์ส่วนใหญ่จะไม่ระบุความถี่สูงสุดในเอกสารข้อมูล แต่ทั้งหมดก็มีข้อจำกัดความถี่สูงสุดหลายร้อยกิโลเฮิร์ตซ์ตลอดช่วงอุณหภูมิทั้งหมด ส่วนที่ 8.1 ของเอกสารข้อมูล Texas Instruments NE555 [ 1 ]ระบุค่า 100 กิโลเฮิร์ตซ์ และเว็บไซต์ของพวกเขาแสดงค่า 100 กิโลเฮิร์ตซ์ในตารางเปรียบเทียบตัวจับเวลา Signetics App Note 170 ระบุว่าอุปกรณ์ส่วนใหญ่จะสั่นได้ถึง 1 MHz อย่างไรก็ตาม เมื่อพิจารณาถึงความเสถียรของอุณหภูมิ ควรจำกัดไว้ที่ประมาณ 500 กิโลเฮิร์ตซ์[ 2 ]บันทึกการใช้งานจากHFOกล่าวถึงว่าที่แรงดันไฟฟ้าแหล่งจ่ายที่สูงขึ้น การกระจายพลังงานสูงสุดของวงจรอาจจำกัดความถี่ในการทำงาน เนื่องจากกระแสไฟจ่ายเพิ่มขึ้นตามความถี่[ 45 ]
- สำหรับคอลัมน์ "ผู้ผลิต" ข้อมูลต่อไปนี้จะเชื่อมโยงผู้ผลิตตัวจับเวลา 555 ในอดีตกับชื่อบริษัทในปัจจุบัน
- Fairchild Semiconductorถูกขายให้กับON Semiconductorในปี 2016 [ 46 ] ON Semiconductor ก่อตั้งขึ้นในปี 1999 โดยแยกตัวออกมาจากMotorola Semiconductor Components Group [ 47 ] MC1455 เริ่มต้นจากการเป็นผลิตภัณฑ์ของ Motorola
- Intersilถูกขายให้กับRenesas Electronicsในปี 2017 [ 48 ] ICM7555 และ ICM7556 เริ่มต้นจากการเป็นผลิตภัณฑ์ของ Intersil
- Micrel ถูกขายให้กับMicrochip Technologyในปี 2558 [ 49 ] MIC1555 เริ่มต้นจากการเป็นผลิตภัณฑ์ของ Micrel
- บริษัท National Semiconductorถูกขายให้กับTexas Instrumentsในปี 2554 [ 50 ] LM555 และ LM556 เริ่มต้นจากการเป็นผลิตภัณฑ์ของ National Semiconductor
- Signeticsถูกขายให้กับPhilips Semiconductorในปี 1975 และต่อมาขายให้กับNXP Semiconductorsในปี 2006 [ 51 ]
- บริษัท Zetex Semiconductorsถูกขายให้กับDiodes Incorporatedในปี 2551 [ 52 ] ZSCT1555 เริ่มต้นจากการเป็นผลิตภัณฑ์ของ Zetex [ 8 ]
ตัวจับเวลาคู่ 556

รุ่นคู่เรียกว่า 556 ประกอบด้วยตัวจับเวลา 555 สองตัวในแพ็คเกจ 14 พิน โดยมีเพียงสองพินจ่ายไฟที่ใช้ร่วมกันระหว่างตัวจับเวลาทั้งสอง[ 21 ] [ 16 ]ในปี 2020 รุ่นไบโพลาร์มีจำหน่ายในชื่อ NE556 [ 21 ]และรุ่น CMOS มีจำหน่ายในชื่อ Intersil ICM7556 และ Texas Instruments TLC556 และ TLC552 ดูตารางอนุพันธ์ในบทความนี้[ 17 ] [ 43 ] [ 42 ]
ตัวจับเวลาสี่ตัว 558



เวอร์ชันควอดเรียกว่า 558 และมีตัวจับเวลาที่มีฟังก์ชันการทำงานลดลงสี่ตัวในแพ็คเกจ 16 พิน ซึ่งออกแบบมาเพื่อใช้งาน กับ มัลติไวเบรเตอร์แบบโมโนสเตเบิล เป็นหลัก [ 53 ] [ 2 ]ภายในปี 2014 NE558 เวอร์ชัน 16 พินหลายรุ่นกลายเป็นของล้าสมัย[ 54 ]
รายการความแตกต่างบางส่วนระหว่างชิป 558 และ 555: [ 2 ] [ 54 ]
- มี ขา VCC หนึ่งขาและขา GND หนึ่งขา คล้ายกับชิป 556
- สัญญาณ "รีเซ็ต" ทั้งสี่ตัวเชื่อมต่อกันภายในกับขาภายนอกหนึ่งขา (558)
- แรงดันควบคุมสี่ตัวถูกเชื่อมต่อเข้าด้วยกันภายในไปยังขาภายนอกหนึ่งขา (558)
- ทริกเกอร์ทั้งสี่ตัวไวต่อขอบตก (558) แทนที่จะไวต่อระดับ (555)
- ตัวต้านทานสองตัวในวงจรแบ่งแรงดัน (558) แทนที่จะเป็นตัวต้านทานสามตัว (555)
- ตัวเปรียบเทียบหนึ่งตัว (558) แทนที่จะเป็นตัวเปรียบเทียบสองตัว (555)
- เอาต์พุตทั้งสี่เป็น แบบ open-collector (OC) (558) แทนที่จะเป็น แบบ push–pull (PP) (555)
ดูเพิ่มเติม
- วงจร RC
- เคาน์เตอร์ (ดิจิทัล)
- แอมพลิฟายเออร์ปฏิบัติการ
- รายชื่อวงจรรวมแบบ LM-series
- รายชื่อวงจรรวมเชิงเส้น
- วงจรรวมซีรีส์ 4000 , รายชื่อวงจรรวมซีรีส์ 4000
- วงจรรวมซีรีส์ 7400 , รายชื่อวงจรรวมซีรีส์ 7400
- เอาต์พุตแบบพุช-พูล , เอาต์พุตแบบโอเพ่นคอลเลคเตอร์/เดรน , เอาต์พุตแบบสามสถานะ
หมายเหตุ
- ^ ln(2)เป็นค่าคงที่ ประมาณ 0.693147 (ปัดเศษเป็นตัวเลขสำคัญ 6 หลัก) หรือโดยทั่วไปจะปัดเศษเป็นตัวเลขน้อยกว่าในหนังสือและเอกสารข้อมูลของตัวจับเวลา 555 เป็น 0.693, 0.69 หรือ 0.7
- ^ ln(3)เป็นค่าคงที่ ประมาณ 1.098612 (ปัดเศษเป็นตัวเลขสำคัญ 6 หลัก) หรือโดยทั่วไปจะปัดเศษเป็นตัวเลขน้อยกว่าในหนังสือและเอกสารข้อมูลของตัวจับเวลา 555 เป็น 1.099 หรือ 1.1
อ่านเพิ่มเติม
- หนังสือ
- หนังสือคู่มือการประยุกต์ใช้ตัวจับเวลา 555 พร้อมการทดลองฉบับที่ 2 โดย Howard Berlin สำนักพิมพ์ BPB จำนวน 218 หน้า ปี 2008 ISBN 978-8176567909( พิมพ์ครั้งแรกในปี 1978)
- คู่มือวงจรตัวจับเวลา/เครื่องกำเนิดไฟฟ้า ฉบับพิมพ์ครั้งที่ 1; RM Marston; Newnes; 276 หน้า; 1990; ISBN 978-0434912919.
- สมุดบันทึกขนาดเล็กสำหรับวิศวกร – วงจรไอซีจับเวลา 555 ; ฉบับที่ 3; ฟอร์เรสต์ มิมส์ที่ 3; เรดิโอ แช็ค; 33 หน้า; 1989; ASIN B000MN54A6 (ฉบับพิมพ์ครั้งแรกในปี 1984)
- ตำราอาหารสำหรับเครื่องจับเวลา ICฉบับที่ 2 โดยวอลต์ จุงสำนักพิมพ์แซมส์ จำนวน 384 หน้า ปี 1983 ISBN 978-0672219320( พิมพ์ครั้งแรกในปี 1977)
- 110 โครงการตัวจับเวลา IC ; จูลส์ กิลเดอร์; เฮย์เดน; 115 หน้า; 1979; ISBN 978-0810456884.
- โครงการ IC 555 ; อี.เอ. พาร์; สำนักพิมพ์เบอร์นาร์ด บาบานี; 144 หน้า; 1978; ISBN 978-0859340472.
- หนังสือที่มีบทจับเวลา
- บทเรียนเกี่ยวกับวงจรไฟฟ้า - เล่มที่ 6 - การทดลอง ; โทนี่ คูฟาลด์ท; โครงการหนังสือเปิด; 423 หน้า; 2010. (บทที่ 6 และ 8)
- การออกแบบชิปอนาล็อก ; ฮันส์ คาเมนซินด์ (ผู้คิดค้นตัวจับเวลา 555); สำนักพิมพ์ Virtual Bookworm; 244 หน้า; ปี 2005; ISBN 978-1589397187( บทที่ 11)
- วงจรและโครงงานเกี่ยวกับตัวจับเวลา, ตัวขยายสัญญาณปฏิบัติการ และออปโตอิเล็กทรอนิกส์ ; ฟอร์เรสต์ มิมส์ที่ 3; สำนักพิมพ์มาสเตอร์; 128 หน้า; 2004; ISBN 978-0945053293( บทที่ 1)
- คู่มือข้อมูลและการใช้งานของวงจรเชิงเส้น LSI ; Signetics ; 1250 หน้า; 1985 (หมายเหตุการใช้งาน AN170/171 และเอกสารข้อมูล NE555/6/8)
- คู่มือการใช้งานอุปกรณ์อนาล็อก ; Signetics ; 418 หน้า; 1979. (บทที่ 6)
- ตำราอาหาร TTL ; ดอน แลนแคสเตอร์ ; สำนักพิมพ์แซมส์; 412 หน้า; 1974; ISBN 978-0672210358( บทที่ 4 หน้า 171-188)
- เอกสารข้อมูลผลิตภัณฑ์
- ดูลิงก์ใน ตาราง "อนุพันธ์"และส่วน "เอกสารอ้างอิง" ในบทความนี้
ลิงก์ภายนอก
- การใช้งานไอซีตัวจับเวลา 555 ในวงจรพิเศษหรือวงจรที่ไม่ธรรมดา - นิตยสาร Nuts & Volts
- 555 บทช่วยสอนตัวจับเวลา - Tony van Roon
- ข้อผิดพลาดทั่วไปเมื่อใช้ตัวจับเวลา 555
- เครื่องคำนวณจังหวะ 555: แอสเตเบิล , โมโนสเตเบิล
- การแกะชิ้นส่วนชิปไบโพลาร์ RCA LM555CH
- การถอดประกอบชิป CMOS TI LMC555
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ไอซีตัวจับเวลา 555
ไอ ซีตัวจับเวลา 555 เป็น วงจรรวม ที่ใช้ในงาน จับเวลา หน่วงเวลา สร้างพัลส์ และ ออสซิลเลเตอร์...
ประวัติศาสตร์
ไอซีตัวจับเวลาได้รับการออกแบบในปี 1971 โดย Hans Camenzind ภายใต้สัญญา จ้างกับ Signetics [ 3 ] ในปี 1968 เขาได้รับการว่าจ้างจาก Signetics ให้พัฒนา ไอซี วงจรล็อกเฟส (PLL) เขาออกแบบออสซิลเลเตอร์สำหรับ PLL...
ชื่อ
หนังสือหลายเล่มรายงานว่าชื่อ "555" ของไอซีตัวจับเวลามาจากตัวต้านทาน 5 kΩ สามตัวที่อยู่ภายในชิป [ 10 ] [ 11 ] [ 12 ] อย่างไรก็ตาม ในการสัมภาษณ์ที่บันทึกไว้กับภัณฑารักษ์พิพิธภัณฑ์ทรานซิสเตอร์ออนไลน์ [ 13 ] ฮันส์ คาเมนซินด์ กล่าวว่า "มันถูกเลือกโดยพลการเท่านั้น...
ออกแบบ
ขึ้นอยู่กับผู้ผลิต แพ็คเกจ 555 มาตรฐานประกอบด้วย ทรานซิสเตอร์ 25 ตัว ไดโอด 2 ตัวและ ตัวต้านทาน 15 ตัว บน ชิป ซิลิคอน ที่บรรจุใน แพ็คเกจแบบ Dual In-Line 8 ขา(DIP-8) [ 15 ] รุ่นที่มีให้เลือก ได้แก่ 556 (DIP-14 ที่รวม 555 สองตัวที่สมบูรณ์ไว้ในชิปเดียว) [ 16 ]...