อ่าน 12 นาที
แรงบิด
ใน ฟิสิกส์ และ กลศาสตร์ แรง บิด คือ แรง เชิงเส้น ที่สอดคล้องกับการหมุน[ 1 ] เรียก อีกอย่างว่า โมเมนต์ของแรง หรือเรียกง่ายๆ ว่า โมเมนต์...
แรงบิด
| แรงบิด | |
|---|---|
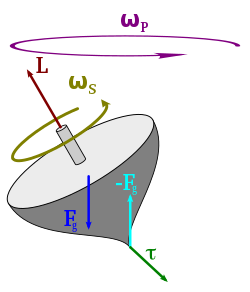
 ความสัมพันธ์ระหว่างแรงFแรงบิดτ โมเมนตัมเชิงเส้นpและโมเมนตัมเชิงมุมL ในระบบที่มีการหมุนจำกัดอยู่บนระนาบเดียวเท่านั้น ( ไม่พิจารณาแรงและโมเมนต์เนื่องจากแรงโน้มถ่วงและแรงเสียดทาน ) | |
สัญลักษณ์ทั่วไป | , ม. |
| หน่วย SI | เอ็น⋅ม |
หน่วยอื่นๆ | ปอนด์-ฟุต , lbf ⋅นิ้ว, ozf⋅in |
| ในหน่วยฐาน SI | กก.⋅ม. ²⋅วินาที⁻² |
| มิติ | |


| ส่วนหนึ่งของชุดบทความเกี่ยวกับ |
| กลศาสตร์คลาสสิก |
|---|
|

ในฟิสิกส์และกลศาสตร์แรงบิดคือแรงเชิงเส้นที่สอดคล้องกับการหมุน[ 1 ] เรียกอีกอย่างว่าโมเมนต์ของแรงหรือเรียกง่ายๆ ว่าโมเมนต์เช่นเดียวกับแรงเชิงเส้นที่เป็นแรงผลักหรือแรงดึงที่กระทำต่อวัตถุ แรงบิดสามารถคิดได้ว่าเป็นแรงบิดที่กระทำต่อวัตถุโดยสัมพันธ์กับแกนที่เลือก ตัวอย่างเช่น เมื่อขันสกรูไขควงจะ ออกแรงบิดให้กับ สกรู ทำให้สกรูมีแนวโน้มที่จะหมุนรอบแกน ของ มัน
โดยทั่วไปแล้ว คำว่าแรงบิดจะถูกอ้างถึงโดยใช้คำศัพท์ที่แตกต่างกันไปตามสถานที่ทางภูมิศาสตร์และสาขาวิชา โดยแรงบิดมักจะเกี่ยวข้องกับฟิสิกส์ และโมเมนต์มักจะเกี่ยวข้องกับวิศวกรรม บทความนี้ใช้คำจำกัดความที่ใช้ในฟิสิกส์ของสหรัฐอเมริกาในการใช้คำว่าแรงบิด[ 2 ]
โดยทั่วไป แรงบิดจะแสดงทางคณิตศาสตร์โดยใช้อักษรกรีก ตัวเล็ก เทา (𝜏) และเมื่อกล่าวถึงในฐานะโมเมนต์ของแรง มักใช้สัญลักษณ์Mแทน
ศัพท์ทางประวัติศาสตร์
กล่าวกันว่าคำว่าtorque (จากภาษาละตินtorquēre แปลว่า 'บิด') ได้รับการเสนอแนะโดย James Thomsonและปรากฏในสิ่งพิมพ์ในเดือนเมษายน พ.ศ. 2427 [ 3 ] [ 4 ] [ 5 ]การใช้งานได้รับการยืนยันในปีเดียวกันโดยSilvanus P. Thompsonในฉบับพิมพ์ครั้งแรกของDynamo-Electric Machinery [ 5 ] Thompsonอธิบายการใช้คำนี้ของเขาดังนี้: [ 4 ]
เช่นเดียวกับนิยามของแรง ตามทฤษฎีของนิวตันที่ว่าแรง คือสิ่งที่ก่อให้เกิดหรือมีแนวโน้มที่จะก่อให้เกิดการเคลื่อนที่ (ตามแนวเส้นตรง) แรงบิดก็อาจนิยามได้ว่าคือสิ่งที่ก่อให้เกิดหรือมีแนวโน้มที่จะก่อให้เกิดการบิด (รอบแกน) การใช้คำที่แสดงถึงการกระทำนี้เป็นหน่วยเดียวที่แน่นอนนั้นดีกว่าการใช้คำอย่าง " แรงคู่ " และ " โมเมนต์ " ซึ่งสื่อถึงแนวคิดที่ซับซ้อนกว่า แนวคิดเดียวของการบิดที่ใช้เพื่อหมุนเพลาดีกว่าแนวคิดที่ซับซ้อนกว่าของการใช้แรงเชิงเส้น (หรือแรงสองแรง) ด้วยคานงัดบางอย่าง
ในวิศวกรรมเครื่องกลในสหราชอาณาจักรและสหรัฐอเมริกา แรงบิดโดยทั่วไปเรียกว่าโมเมนต์ของแรง ซึ่งมักจะ ย่อเป็นโมเมนต์[ 6 ]คำศัพท์นี้สามารถสืบย้อนไปได้อย่างน้อยถึงปี 1811 ในTraité de mécaniqueของSiméon Denis Poisson [ 7 ]งานของ Poisson ได้รับการแปลเป็นภาษาอังกฤษในปี 1842
นิยามและความสัมพันธ์กับปริมาณทางกายภาพอื่นๆ
แรงบิด คือ ผลคูณเชิงเวกเตอร์ระหว่างแรงเชิงเส้นและรัศมีรอบแกนหมุน

แรงบิดรอบแกนสามารถคำนวณได้โดยการคูณแรงเชิงเส้นที่กระทำตั้งฉากกับคานกับระยะห่างจากจุดหมุนของคาน (ความยาวของแขนคาน )
ดังนั้น แรงบิดจึงถูกนิยามว่าเป็นผลคูณของขนาดของส่วนประกอบตั้งฉากของแรงและระยะห่างของเส้นแรงจากจุดที่กำลังกำหนดแรงบิดนั้น
ในสามมิติ แรงบิดเป็นเวกเตอร์เสมือนสำหรับอนุภาคจุด แรงบิดจะกำหนดโดยผลคูณไขว้ของเวกเตอร์การกระจัดและเวกเตอร์แรงทิศทางของแรงบิดสามารถกำหนดได้โดยใช้กฎมือขวา : ถ้านิ้วมือขวาโค้งงอจากทิศทางของแขนคานไปยังทิศทางของแรง นิ้วหัวแม่มือจะชี้ไปในทิศทางของแรงบิด[ 8 ]ดังนั้นเวกเตอร์แรงบิดจึงตั้งฉากกับทั้ง เวกเตอร์ ตำแหน่งและ เวกเตอร์ แรงและกำหนดระนาบที่เวกเตอร์ทั้งสองอยู่ ทิศทางของเวกเตอร์แรงบิดที่ได้จะถูกกำหนดโดยกฎมือขวาดังนั้น แรงใดๆ ที่ขนานกับเวกเตอร์ตำแหน่งของอนุภาคจะไม่ก่อให้เกิดแรงบิด[ 9 ] [ 10 ]ขนาดของแรงบิดที่ใช้กับวัตถุแข็งขึ้นอยู่กับปริมาณสามอย่าง ได้แก่ แรงที่ใช้เวกเตอร์แขนคาน[ 11 ]ที่เชื่อมต่อจุดที่กำลังวัดแรงบิดกับจุดที่ใช้แรง และมุมระหว่างเวกเตอร์แรงและเวกเตอร์แขนคาน ในสัญลักษณ์:

ที่ไหน
- คือเวกเตอร์แรงบิด และคือขนาดของแรงบิด
- คือเวกเตอร์ตำแหน่ง (เวกเตอร์จากจุดที่วัดแรงบิดไปยังจุดที่ออกแรง) และrคือขนาดของเวกเตอร์ตำแหน่ง
- คือเวกเตอร์แรง , Fคือขนาดของเวกเตอร์แรง และF⊥คือปริมาณแรงที่พุ่งตั้งฉากกับตำแหน่งของอนุภาค
- หมายถึงผลคูณเชิงเวกเตอร์ซึ่งสร้างเวกเตอร์ที่ตั้งฉากกับทั้งrและFตามกฎมือขวา
- คือมุมระหว่างเวกเตอร์แรงและเวกเตอร์แขนคาน





หน่วยSIของแรงบิดคือนิวตันเมตร (N⋅m) สำหรับข้อมูลเพิ่มเติมเกี่ยวกับหน่วยของแรงบิด โปรดดูที่หัวข้อ §หน่วย
ความสัมพันธ์กับโมเมนตัมเชิงมุม
แรงบิดสุทธิที่กระทำต่อวัตถุจะเป็นตัวกำหนดอัตราการเปลี่ยนแปลงของโมเมนตัม เชิงมุม ของวัตถุ

โดยที่คือเวกเตอร์โมเมนตัมเชิงมุม และคือเวลา สำหรับการเคลื่อนที่ของอนุภาคจุด



โดยที่คือโมเมนต์ความเฉื่อยและคือเวกเตอร์เสมือนความเร็วเชิงมุม วงโคจร ดังนั้นจึงสรุปได้ว่า



การใช้ค่าอนุพันธ์ของเวกเตอร์คือ สมการนี้เป็นอนาล็อกเชิงการหมุนของกฎข้อที่สองของนิวตันสำหรับอนุภาคจุด และใช้ได้กับวิถีการเคลื่อนที่ทุกประเภท ในบางกรณีที่ง่าย เช่น แผ่นดิสก์ที่หมุน ซึ่งมีเพียงโมเมนต์ความเฉื่อยบนแกนหมุนเท่านั้น กฎข้อที่สองของนิวตันเชิงการหมุนสามารถเป็นได้ดังนี้ โดยที่



การพิสูจน์ความเท่าเทียมกันของคำจำกัดความ
นิยามของโมเมนตัมเชิงมุมสำหรับอนุภาคจุดเดียวคือ: โดยที่p คือ โมเมนตัมเชิงเส้นของอนุภาคและrคือเวกเตอร์ตำแหน่งจากจุดกำเนิด อนุพันธ์เทียบกับเวลาของสิ่งนี้คือ:


ผลลัพธ์นี้สามารถพิสูจน์ได้ง่ายๆ โดยการแยกเวกเตอร์ออกเป็นส่วนประกอบและใช้กฎการคูณแต่เนื่องจากอัตราการเปลี่ยนแปลงของโมเมนตัมเชิงเส้นคือแรงและอัตราการเปลี่ยนแปลงของตำแหน่งคือความเร็ว



ผลคูณเวกเตอร์ของโมเมนตัมกับความเร็วที่เกี่ยวข้องมีค่าเป็นศูนย์ เนื่องจากความเร็วและโมเมนตัมขนานกัน ดังนั้นพจน์ที่สองจึงเป็นศูนย์ ด้วยเหตุนี้ แรงบิดที่กระทำต่ออนุภาคจึงเท่ากับอนุพันธ์อันดับแรกของโมเมนตัมเชิงมุมเทียบกับเวลา ถ้ามีแรงหลายแรงกระทำ ตามกฎข้อที่สองของนิวตันจะได้ว่า



นี่คือบทพิสูจน์ทั่วไปสำหรับอนุภาคจุด แต่สามารถขยายไปสู่ระบบอนุภาคจุดได้โดยการใช้บทพิสูจน์ข้างต้นกับอนุภาคจุดแต่ละตัว แล้วจึงรวมผลลัพธ์ทั้งหมดเข้าด้วยกัน ในทำนองเดียวกัน บทพิสูจน์นี้สามารถขยายไปสู่มวลต่อเนื่องได้โดยการใช้บทพิสูจน์ข้างต้นกับแต่ละจุดภายในมวล แล้วจึงทำการอินทิเก รต ตลอดทั้งมวล
อนุพันธ์ของแรงบิด
ในฟิสิกส์โรตาตัมคืออนุพันธ์ของแรงบิดเทียบกับเวลา[ 12 ]

โดยที่τคือแรงบิด
คำนี้มาจากคำภาษาละติน ว่า rotātusซึ่งหมายถึง 'หมุน' คำว่าrotatumไม่ได้รับการยอมรับอย่างเป็นสากล แต่ก็ใช้กันทั่วไป ไม่มีพจนานุกรมที่ได้รับการยอมรับอย่างเป็นสากลเพื่อระบุคำที่สืบเนื่องมาจาก rotatum แม้ว่าบางครั้งจะมีการเสนอแนวคิดต่างๆ ขึ้นมาก็ตาม
โดยใช้นิยามของแรงบิดในรูปผลคูณไขว้ นิพจน์ทางเลือกสำหรับการหมุนคือ:

เนื่องจากอัตราการเปลี่ยนแปลงของแรงคือแรงดึง (yank) และอัตราการเปลี่ยนแปลงของตำแหน่งคือความเร็ว (velocity) ดังนั้นจึงสามารถลดรูปสมการให้ง่ายขึ้นได้ดังนี้:


ความสัมพันธ์กับพลังงานและอำนาจ
กฎการอนุรักษ์พลังงานสามารถนำมาใช้เพื่อทำความเข้าใจแรงบิดได้เช่นกัน หากแรงกระทำผ่านระยะทาง แรงนั้นกำลังทำงานเชิงกล ในทำนองเดียวกัน หากแรงบิดกระทำผ่านการกระจัดเชิงมุม แรงบิด นั้นก็กำลังทำงาน ในทางคณิตศาสตร์ สำหรับการหมุนรอบแกนคงที่ที่ผ่านจุดศูนย์กลางมวลงานWสามารถแสดงได้ดังนี้

โดยที่τคือแรงบิด และθ 1และθ 2 แทน ตำแหน่งเชิงมุมเริ่มต้นและสุดท้ายของวัตถุ (ตามลำดับ) [ 13 ]
จากหลักการงาน-พลังงาน จะได้ ว่าWยังแสดงถึงการเปลี่ยนแปลงของพลังงานจลน์เชิงหมุนE rของวัตถุ ซึ่งกำหนดโดย

โดยที่Iคือโมเมนต์ความเฉื่อยของวัตถุ และωคือความเร็วเชิงมุม ของ วัตถุ[ 13 ]
กำลังคือ งานต่อหน่วยเวลาซึ่งกำหนดโดยสูตร

โดยที่Pคือกำลัง, τคือแรงบิด, ωคือความเร็วเชิงมุมและแทนผลคูณสเกลาร์

ในทางพีชคณิต สมการสามารถจัดเรียงใหม่เพื่อคำนวณแรงบิดสำหรับความเร็วเชิงมุมและกำลังเอาต์พุตที่กำหนด กำลังที่ส่งผ่านโดยแรงบิดขึ้นอยู่กับความเร็วเชิงมุม ณ ขณะนั้นเท่านั้น ไม่ขึ้นอยู่กับว่าความเร็วเชิงมุมเพิ่มขึ้น ลดลง หรือคงที่ในขณะที่กำลังใช้แรงบิด (ซึ่งเทียบเท่ากับกรณีเชิงเส้นที่กำลังที่ส่งผ่านโดยแรงขึ้นอยู่กับความเร็ว ณ ขณะนั้นเท่านั้น ไม่ขึ้นอยู่กับความเร่งที่เกิดขึ้น หากมี)
การพิสูจน์
งานที่ทำโดยแรงแปรผันที่กระทำต่อการกระจัดเชิงเส้นจำกัดนั้น หาได้จากการอินทิเกรตแรงเทียบกับการกระจัดเชิงเส้นย่อย



อย่างไรก็ตาม การกระจัดเชิงเส้นขนาดเล็กมากนั้นสัมพันธ์กับการกระจัดเชิงมุมที่สอดคล้องกันและเวกเตอร์รัศมีดังนี้


เมื่อแทนค่าลงในนิพจน์ข้างต้นสำหรับงาน จะได้

นิพจน์ภายในอินทิกรัลเป็นผลคูณสามตัวแบบสเกลาร์ แต่ตามนิยามของแรงบิด และเนื่องจากพารามิเตอร์ของการอินทิเกรตได้เปลี่ยนจากการกระจัดเชิงเส้นเป็นการกระจัดเชิงมุม สมการจึงกลายเป็น


ถ้าแรงบิดและการกระจัดเชิงมุมอยู่ในทิศทางเดียวกัน ผลคูณสเกลาร์จะลดลงเหลือผลคูณของขนาด กล่าวคือให้ ผลลัพธ์ดังนี้


หลักการของโมเมนต์
หลักการของโมเมนต์ หรือที่รู้จักกันในชื่อทฤษฎีบทของวาริญง (อย่าสับสนกับทฤษฎีบททางเรขาคณิตที่มีชื่อเดียวกัน) กล่าวว่า แรงบิดลัพธ์ที่เกิดจากแรงหลายแรงที่กระทำต่อจุดหนึ่ง จะเท่ากับผลรวมของแรงบิดที่แต่ละแรงกระทำ:

จากข้อนี้จึงสรุปได้ว่า แรงบิดที่เกิดจากแรงจำนวน N แรงที่กระทำรอบจุดหมุนบนวัตถุจะสมดุลกันเมื่อ

หน่วย
เอกสารSIอย่างเป็นทางการ ระบุว่า นิวตันเมตรเป็นหน่วยมาตรฐานสำหรับแรงบิด ซึ่งแสดงอย่างถูกต้องโดยใช้ N⋅m แม้ว่าจะมีมิติเทียบเท่ากับจูลซึ่งไม่ได้ใช้สำหรับแรงบิดก็ตาม[ 14 ] [ 15 ]ในกรณีของแรงบิด หน่วยจะถูกกำหนดให้กับเวกเตอร์ในขณะที่สำหรับพลังงาน หน่วย จะถูกกำหนดให้กับสเกลาร์ซึ่งหมายความว่าความเท่าเทียมกันของมิติระหว่างนิวตันเมตรและจูลอาจนำไปใช้ได้ในกรณีแรก แต่ไม่ใช่ในกรณีหลัง ปัญหานี้ได้รับการแก้ไขในการวิเคราะห์เชิงทิศทางซึ่งถือว่าเรเดียนเป็นหน่วยพื้นฐานแทนที่จะเป็นหน่วยไร้มิติ[ 16 ] แรงบิดมีมิติของแรงคูณระยะทางใน เชิงสัญลักษณ์T −2 L 2 Mและมิติพื้นฐานเหล่านั้นเหมือนกับของพลังงานหรืองาน
หน่วยวัดแรงบิดแบบดั้งเดิมในระบบอิมพีเรียลคือปอนด์-ฟุต (lbf-ft) หรือสำหรับค่าเล็กๆ คือ ปอนด์-นิ้ว (lbf-in) ในสหรัฐอเมริกา แรงบิดมักถูกเรียกว่าฟุต-ปอนด์ (แสดงเป็น lb-ft หรือ ft-lb) และนิ้ว-ปอนด์ (แสดงเป็น in-lb) [ 17 ] [ 18 ]ผู้ปฏิบัติงานอาศัยบริบทและเครื่องหมายขีดกลางในตัวย่อเพื่อทราบว่าสิ่งเหล่านี้หมายถึงแรงบิด ไม่ใช่พลังงานหรือโมเมนต์ของมวล (ดังที่สัญลักษณ์ ft-lb จะบ่งบอกอย่างถูกต้อง)
การแปลงเป็นหน่วยอื่นๆ
อาจจำเป็นต้องใช้ตัวแปลงหน่วยเมื่อใช้หน่วยกำลังหรือแรงบิดที่แตกต่างกัน ตัวอย่างเช่น หาก ใช้ ความเร็วรอบ (หน่วย: รอบต่อนาทีหรือวินาที) แทนความเร็วเชิงมุม (หน่วย: เรเดียนต่อวินาที) เราต้องคูณด้วย 2π เรเดียนต่อรอบ ในสูตรต่อไปนี้Pคือกำลังτคือแรงบิด และν ( อักษรกรีกนิว ) คือความเร็วรอบ

แสดงจำนวนหน่วย:

เมื่อหารด้วย 60 วินาทีต่อนาที จะได้ผลลัพธ์ดังต่อไปนี้

โดยที่ความเร็วในการหมุนมีหน่วยเป็นรอบต่อนาที (rpm, rev/min)
บางคน (เช่น วิศวกรยานยนต์ชาวอเมริกัน) ใช้หน่วยแรงม้า (เชิงกล) สำหรับกำลัง หน่วยฟุต-ปอนด์ (lbf⋅ft) สำหรับแรงบิด และหน่วยรอบต่อนาที (rpm) สำหรับความเร็วรอบ ส่งผลให้สูตรเปลี่ยนไปเป็น:

ค่าคงที่ด้านล่าง (ในหน่วยฟุต-ปอนด์ต่อนาที) จะเปลี่ยนแปลงไปตามนิยามของแรงม้า ตัวอย่างเช่น หากใช้แรงม้าแบบเมตริก ค่านี้จะอยู่ที่ประมาณ 32,550
การใช้หน่วยอื่นๆ (เช่นBTUต่อชั่วโมงสำหรับกำลังไฟฟ้า) จะต้องใช้ตัวแปลงค่าแบบกำหนดเองที่แตกต่างกัน
อนุพันธ์
สำหรับวัตถุที่หมุนระยะทางเชิงเส้นที่เคลื่อนที่ไปตามเส้นรอบวงของการหมุนนั้นเท่ากับผลคูณของรัศมีกับมุมที่เคลื่อนที่ไป นั่นคือ ระยะทางเชิงเส้น = รัศมี × ระยะทางเชิงมุม และตามนิยาม ระยะทางเชิงเส้น = ความเร็วเชิงเส้น × เวลา = รัศมี × ความเร็วเชิงมุม × เวลา
ตามนิยามของแรงบิด: แรงบิด = รัศมี × แรง เราสามารถจัดเรียงใหม่เพื่อหาว่า แรง = แรงบิด ÷ รัศมี จากนั้นเราสามารถแทนค่าทั้งสองนี้ลงในนิยามของกำลังได้ :
![{\displaystyle {\begin{aligned}{\text{กำลัง}}&={\frac {{\text{แรง}}\cdot {\text{ระยะทางเชิงเส้น}}}{\text{เวลา}}}\\[6pt]&={\frac {\left({\dfrac {\text{แรงบิด}}{r}}\right)\cdot (r\cdot {\text{ความเร็วเชิงมุม}}\cdot t)}{t}}\\[6pt]&={\text{แรงบิด}}\cdot {\text{ความเร็วเชิงมุม}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4382d186e4085de735546ad46847d852af843fcb)
รัศมีrและเวลาtหายไปจากสมการแล้ว อย่างไรก็ตาม ความเร็วเชิงมุมจะต้องมีหน่วยเป็นเรเดียนต่อหน่วยเวลา ตามความสัมพันธ์โดยตรงที่สมมติไว้ระหว่างความเร็วเชิงเส้นและความเร็วเชิงมุมในตอนต้นของการพิสูจน์ หากความเร็วในการหมุนวัดเป็นรอบต่อหน่วยเวลา ความเร็วเชิงเส้นและระยะทางจะเพิ่มขึ้นตามสัดส่วน 2π ในการพิสูจน์ข้างต้นเพื่อให้ได้:

ถ้าแรงบิดมีหน่วยเป็นนิวตัน-เมตร และความเร็วรอบมีหน่วยเป็นรอบต่อวินาที สมการข้างต้นจะให้กำลังในหน่วยนิวตัน-เมตรต่อวินาที หรือวัตต์ แต่ถ้าใช้หน่วยอิมพีเรียล และแรงบิดมีหน่วยเป็นปอนด์-แรงฟุต และความเร็วรอบมีหน่วยเป็นรอบต่อนาที สมการข้างต้นจะให้กำลังในหน่วยฟุต-ปอนด์-แรงต่อนาที จากนั้นจึงแปลงสมการให้อยู่ในหน่วยแรงม้าโดยใช้ตัวแปลง 33,000 ฟุต⋅ปอนด์/นาที ต่อแรงม้า:
![{\displaystyle {\begin{aligned}{\text{กำลัง}}&={\text{แรงบิด}}\cdot 2\pi \cdot {\text{ความเร็วรอบ}}\cdot {\frac {{\text{ฟุต}}{\cdot }{\text{ปอนด์แรง}}}{\text{นาที}}}\cdot {\frac {\text{แรงม้า}}{33,\!000\cdot {\frac {{\text{ฟุต}}\cdot {\text{ปอนด์แรง}}}{\text{นาที}}}}}\\[6pt]&\approx {\frac {{\text{แรงบิด}}\cdot {\text{รอบต่อนาที}}}{5,\!252}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/db904e5528e26299e0a8926baf3b676956337dfc)
เพราะ

กรณีพิเศษและข้อเท็จจริงอื่นๆ
สูตรโมเมนต์อาร์ม

กรณีพิเศษที่มีประโยชน์มาก ซึ่งมักถูกนำมาใช้เป็นนิยามของแรงบิดในสาขาอื่นๆ นอกเหนือจากฟิสิกส์ มีดังนี้:

การสร้าง "แขนโมเมนต์" แสดงอยู่ในรูปทางด้านขวา พร้อมกับเวกเตอร์rและFที่กล่าวถึงข้างต้น ปัญหาของคำจำกัดความนี้คือ มันไม่ได้ให้ทิศทางของแรงบิด แต่ให้เพียงขนาดเท่านั้น ดังนั้นจึงยากที่จะใช้ในกรณีสามมิติ หากแรงตั้งฉากกับเวกเตอร์การกระจัดrแขนโมเมนต์จะเท่ากับระยะห่างจากจุดศูนย์กลาง และแรงบิดจะมีค่าสูงสุดสำหรับแรงที่กำหนด สมการสำหรับขนาดของแรงบิดที่เกิดจากแรงตั้งฉาก:

ตัวอย่างเช่น หากบุคคลหนึ่งออกแรง 10 นิวตันที่ปลายสุดของประแจที่มีความยาว 0.5 เมตร (หรือออกแรง 10 นิวตันที่ระยะ 0.5 เมตรจากจุดบิดของประแจที่มีความยาวใดๆ ก็ตาม) แรงบิดจะมีค่าเท่ากับ 5 นิวตันเมตร โดยสมมติว่าบุคคลนั้นเคลื่อนประแจโดยออกแรงในระนาบการเคลื่อนที่และตั้งฉากกับประแจ
สมดุลสถิต
เพื่อให้วัตถุอยู่ในสภาวะสมดุลสถิตไม่เพียงแต่ผลรวมของแรงจะต้องเป็นศูนย์เท่านั้น แต่ผลรวมของแรงบิด (โมเมนต์) รอบจุดใดๆ ก็ต้องเป็นศูนย์ด้วย สำหรับสถานการณ์สองมิติที่มีแรงในแนวนอนและแนวตั้ง เงื่อนไขผลรวมของแรงคือสมการสองสมการ: Σ H = 0และΣ V = 0และแรงบิดคือสมการที่สาม: Σ τ = 0นั่นคือ ในการแก้ ปัญหาสมดุล สถิตที่กำหนดได้ในสองมิติ จะใช้สมการสามสมการ
แรงสุทธิเทียบกับแรงบิด
เมื่อแรงลัพธ์ที่กระทำต่อระบบเป็นศูนย์ แรงบิดที่วัดจากจุดใดๆ ในอวกาศจะมีค่าเท่ากัน ตัวอย่างเช่น แรงบิดที่กระทำต่อวงจรที่มีกระแสไฟฟ้าไหลผ่านในสนามแม่เหล็กสม่ำเสมอจะมีค่าเท่ากันไม่ว่าจุดอ้างอิงจะเป็นที่ใดก็ตาม หากแรงลัพธ์ไม่เป็นศูนย์ และแรงบิดที่วัดจาก จุดหนึ่งไปยังอีกจุด หนึ่งมีค่าเท่ากัน แรงบิดที่วัดจากอีกจุด หนึ่งจะมีค่าเท่ากัน




แรงบิดของเครื่องจักร

แรงบิดเป็นส่วนหนึ่งของคุณสมบัติพื้นฐานของเครื่องยนต์ : กำลังเอาต์พุตของเครื่องยนต์แสดงออกมาในรูปของแรงบิดคูณด้วยความเร็วเชิงมุมของเพลาขับ เครื่องยนต์ สันดาปภายในสร้างแรงบิดที่มีประโยชน์ได้เฉพาะในช่วงความเร็วรอบ ที่จำกัดเท่านั้น (โดยทั่วไปประมาณ 1,000–6,000 รอบต่อนาทีสำหรับรถยนต์ขนาดเล็ก) เราสามารถวัดแรงบิดที่เปลี่ยนแปลงไปในช่วงนั้นได้ด้วยไดนาโมมิเตอร์และแสดงผลออกมาเป็นกราฟแรงบิดเครื่องยนต์ไอน้ำและมอเตอร์ไฟฟ้ามักจะสร้างแรงบิดสูงสุดใกล้กับศูนย์รอบต่อนาที โดยแรงบิดจะลดลงเมื่อความเร็วรอบเพิ่มขึ้น (เนื่องจากแรงเสียดทานที่เพิ่มขึ้นและข้อจำกัดอื่นๆ) เครื่องยนต์ไอน้ำแบบลูกสูบและมอเตอร์ไฟฟ้าสามารถสตาร์ทโหลดหนักได้จากศูนย์รอบต่อนาทีโดยไม่ต้องใช้ คลัตช์
ในทางปฏิบัติ ความสัมพันธ์ระหว่างกำลังและแรงบิดสามารถสังเกตได้จากจักรยาน : โดยทั่วไปแล้ว จักรยานประกอบด้วยล้อสองล้อ เฟืองหน้าและเฟืองหลัง (เรียกว่าเฟืองโซ่ ) ที่ขบกับโซ่และกลไกเปลี่ยนเกียร์หากระบบส่งกำลังของจักรยานอนุญาตให้ใช้อัตราทดเกียร์หลายระดับ (เช่นจักรยานหลายเกียร์ ) ซึ่งทั้งหมดนี้ติดอยู่กับเฟรมนักปั่นจักรยานจะให้กำลังป้อนเข้าโดยการหมุนบันได ทำให้เฟืองหน้า (โดยทั่วไปเรียกว่าจานโซ่ ) หมุนกำลังป้อนเข้าที่นักปั่นจักรยานให้มานั้นเท่ากับผลคูณของความเร็วเชิงมุม (เช่น จำนวนรอบการหมุนของบันไดต่อนาทีคูณด้วย 2π )และแรงบิดที่แกนหมุนของชุดจานปั่นระบบ ส่งกำลัง ของจักรยานจะส่งกำลังป้อนเข้าไปยังล้อซึ่งในทางกลับกันจะส่งกำลังที่ได้รับไปยังถนนเป็นกำลังส่งออกของจักรยาน ขึ้นอยู่กับอัตราทดเกียร์ของจักรยาน คู่ ค่าอินพุต (แรงบิด, ความเร็วเชิงมุม) จะถูกแปลงเป็น คู่ ค่าเอาต์พุต (แรงบิด, ความเร็วเชิงมุม) โดยการใช้เกียร์หลังที่ใหญ่ขึ้น หรือการเปลี่ยนไปใช้เกียร์ต่ำในจักรยานหลายเกียร์ความเร็วเชิงมุมของล้อจะลดลง ในขณะที่แรงบิดจะเพิ่มขึ้น ซึ่งผลคูณของแรงบิด (เช่น กำลัง) จะไม่เปลี่ยนแปลง
ตัวคูณแรงบิด
แรงบิดสามารถเพิ่มขึ้นได้สามวิธี: โดยการกำหนดตำแหน่งจุดหมุนให้ความยาวของคานเพิ่มขึ้น; โดยการใช้คานที่ยาวขึ้น; หรือโดยการใช้ชุดเฟืองลดความเร็วหรือกล่องเกียร์กลไกดังกล่าวจะเพิ่มแรงบิดเมื่ออัตราการหมุนลดลง
ดูเพิ่มเติม
ลิงก์ภายนอก
- บทความ เรื่อง "แรงม้าและแรงบิด" ถูกเก็บถาวรไว้เมื่อวันที่ 28 มีนาคม 2007 ในWayback Machineเป็นบทความที่แสดงให้เห็นว่ากำลัง แรงบิด และอัตราทดเกียร์ส่งผลต่อสมรรถนะของรถยนต์อย่างไร
- แรงบิดและโมเมนตัมเชิงมุมในการเคลื่อนที่แบบวงกลมในโครงการ PHYSNET
- การจำลองแรงบิดแบบโต้ตอบ
- ตัวแปลงแรงบิด
- สัมผัสถึงแรงบิดเก็บถาวรเมื่อ 2021-05-08 ที่Wayback Machineแผนภาพเชิงโต้ตอบแสดงขนาดโดยประมาณ
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ แรงบิด
ใน ฟิสิกส์ และ กลศาสตร์ แรง บิด คือ แรง เชิงเส้น ที่สอดคล้องกับการหมุน[ 1 ] เรียก อีกอย่างว่า โมเมนต์ของแรง หรือเรียกง่ายๆ ว่า โมเมนต์...
ศัพท์ทางประวัติศาสตร์
กล่าวกันว่าคำว่า torque (จาก ภาษาละติน torquēre แปลว่า 'บิด') ได้รับการเสนอแนะโดย James Thomson และปรากฏในสิ่งพิมพ์ในเดือนเมษายน พ.ศ. 2427 [ 3 ] [ 4 ] [ 5 ] การใช้งานได้รับการยืนยันในปีเดียวกันโดย Silvanus P.
แรงบิด คือ ผลคูณเชิงเวกเตอร์ระหว่างแรงเชิงเส้นและรัศมีรอบแกนหมุน
แรงบิดรอบแกนสามารถคำนวณได้โดยการคูณแรงเชิงเส้นที่กระทำตั้ง ฉาก กับคานกับระยะห่างจาก จุดหมุนของคาน (ความยาวของ แขนคาน )
ความสัมพันธ์กับโมเมนตัมเชิงมุม
แรงบิดสุทธิที่กระทำต่อวัตถุจะเป็นตัวกำหนดอัตราการเปลี่ยนแปลงของโมเมนตัม เชิงมุม ของวัตถุ