อ่าน 2 นาที
การวัดเชิงมุมแบบไบนารี
การวัดเชิงมุมแบบไบนารี ( BAM ) (และระบบการวัดเชิงมุมแบบไบนารี BAMS ) เป็นการวัดมุมโดยใช้เลขฐานสองและเลขคณิตจุดคงที่โดยที่การหมุนครบหนึ่งรอบจะแทนด้วยค่า 1
การวัดเชิงมุมแบบไบนารี
การวัดเชิงมุมแบบไบนารี ( BAM ) [ 1 ] (และระบบการวัดเชิงมุมแบบไบนารี BAMS [ 2 ] ) เป็นการวัดมุมโดยใช้เลขฐานสองและเลขคณิตจุดคงที่โดยที่การหมุนครบหนึ่งรอบจะแทนด้วยค่า 1
การแสดงมุมเหล่านี้มักใช้ในการควบคุมเชิงตัวเลขและการประมวลผลสัญญาณดิจิทัลเช่น หุ่นยนต์ การนำทาง[ 3 ]เกมคอมพิวเตอร์[ 4 ]และเซ็นเซอร์ดิจิทัล[ 5 ]โดยใช้ประโยชน์จากการลดโมดูลาร์โดยปริยายที่ได้จากการตัดทอนเลขฐานสอง นอกจากนี้ยังอาจใช้เป็นส่วนเศษส่วนของจำนวนจุดคงที่ที่นับจำนวนการหมุนเต็มรอบของล้อรถยนต์หรือสกรูนำเป็นต้น
การเป็นตัวแทน
เศษส่วนการหมุนที่ไม่มีเครื่องหมาย
ในระบบนี้ มุมจะถูกแทนด้วย เลขฐาน สอง แบบไม่มีเครื่องหมาย n บิตในลำดับ 0, ..., 2n −1 ซึ่งตีความได้ว่าเป็นผลคูณของ 1/ 2nของการหมุนครบหนึ่งรอบ นั่นคือ 360/ 2nองศา หรือ 2π/2n เรเดียนตัวเลขนี้ยังสามารถตีความได้ว่าเป็นเศษส่วนของการหมุนครบหนึ่งรอบระหว่าง 0 (รวม) และ 1 (ไม่รวม) ซึ่งแสดงในรูปแบบเลขฐานสองแบบคงที่ โดยมีตัวคูณมาตราส่วนเป็น 1/ 2nการคูณเศษส่วนนั้นด้วย 360° หรือ 2π จะได้มุมในหน่วยองศาในช่วง 0 ถึง 360 หรือในหน่วยเรเดียนในช่วง 0 ถึง 2π ตามลำดับ
ตัวอย่างเช่น เมื่อn = 8จำนวนเต็มไบนารี 00000000 2 (0.00), 01000000 2 (0.25), 10000000 2 (0.50) และ 11000000 2 (0.75) จะแทนค่ามุม 0°, 90°, 180° และ 270° ตามลำดับ
ข้อได้เปรียบหลักของระบบนี้คือ การบวกหรือลบค่าตัวเลขจำนวนเต็มด้วย เลขคณิต nบิตที่ใช้ในคอมพิวเตอร์ส่วนใหญ่จะให้ผลลัพธ์ที่สอดคล้องกับเรขาคณิตของมุม กล่าวคือ ผลลัพธ์จำนวนเต็มของการดำเนินการจะถูกลดทอนโมดูลัส2n โดยอัตโนมัติ ซึ่งตรงกับข้อเท็จจริงที่ว่ามุมที่แตกต่างกันด้วยจำนวนรอบเต็มจำนวนเต็มจะเท่ากัน ดังนั้นจึงไม่จำเป็นต้องทดสอบหรือจัดการการวนรอบอย่างชัดเจน เหมือนที่ต้องทำเมื่อใช้การแสดงผลแบบอื่น (เช่น จำนวนองศาหรือเรเดียนในรูปแบบจุดลอยตัว) [ 6 ]
สำหรับn = 16หน่วยวัดที่เท่ากับ1 / 65,536ของวงกลมบางครั้งเรียกว่าFurmanตามชื่อของ Alan T. Furman นักคณิตศาสตร์ชาวอเมริกันที่ปรับ อัลกอริทึม CORDICสำหรับเลขคณิตจุดคงที่ 16 บิตในช่วงประมาณปี 1980 [ 7 ]ซึ่งน้อยกว่า 20 อาร์คเซคอนด์เล็กน้อย
เศษส่วนของการหมุนที่มีเครื่องหมาย
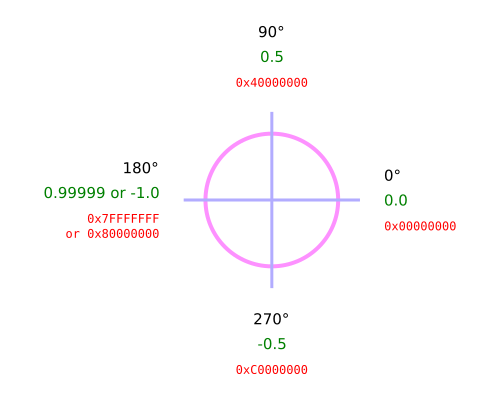
อีกทางเลือกหนึ่ง บิต n บิต เดียวกันนี้ยังสามารถตีความได้ว่าเป็นจำนวนเต็มที่มีเครื่องหมายในช่วง −2 n −1 , ..., 2 n −1 −1 ตาม แบบแผน เลขสองส่วนเติมเต็ม นอกจากนี้ยังสามารถตีความได้ว่าเป็นเศษส่วนของการหมุนเต็มรอบระหว่าง −0.5 (รวม) และ +0.5 (ไม่รวม) ในรูปแบบจุดคงที่ที่มีเครื่องหมาย โดยใช้ตัวคูณมาตราส่วนเดียวกัน หรือเป็นเศษส่วนของการหมุนครึ่งรอบระหว่าง −1.0 (รวม) และ +1.0 (ไม่รวม) โดยใช้ตัวคูณมาตราส่วน1/2 n −1
ไม่ว่าจะด้วยวิธีใดก็ตาม ตัวเลขเหล่านี้สามารถตีความได้ว่าเป็นมุมระหว่าง −180° (รวม) และ +180° (ไม่รวม) โดยที่ −0.25 หมายถึง −90° และ +0.25 หมายถึง +90° ผลลัพธ์ของการบวกหรือลบค่าตัวเลขจะมีเครื่องหมายเดียวกันกับผลลัพธ์ของการบวกหรือลบมุม เมื่อลดมุมให้อยู่ในช่วงนี้แล้ว การตีความนี้ช่วยขจัดความจำเป็นในการลดมุมให้อยู่ในช่วง[−π, +π]เมื่อคำนวณฟังก์ชันตรีโกโนเมตริก
ตัวอย่าง
ในข้อมูลวงโคจรที่ส่งโดยระบบระบุตำแหน่งทั่วโลก (GPS)มุมต่างๆ จะถูกเข้ารหัสโดยใช้การวัดเชิงมุมแบบไบนารี โดยเฉพาะอย่างยิ่ง ดาวเทียมแต่ละดวงจะส่งข้อมูลวงโคจร ที่มี องค์ประกอบวงโคจรแบบเคปเลอร์ 6 องค์ประกอบ ซึ่ง 4 ใน 6 องค์ประกอบนี้เป็นมุม ที่เข้ารหัสเป็นมุมไบนารี 32 บิต ในข้อมูล ปฏิทินดาวเทียมที่มีความแม่นยำต่ำกว่าจะใช้มุมไบนารี 24 บิต
ดูเพิ่มเติม
- เกรด 1/400 ของการหมุนเต็มรอบ
- การปรับขนาดแบบไบนารี
- CORDIC , อัลกอริทึมสำหรับฟังก์ชันตรีโกณมิติ
- รูปหลายเหลี่ยมที่สร้างได้ซึ่งรวมถึงรูปหลายเหลี่ยมทั้งหมดที่มี ด้าน 2nด้าน
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ การวัดเชิงมุมแบบไบนารี
การวัดเชิงมุมแบบไบนารี ( BAM ) (และระบบการวัดเชิงมุมแบบไบนารี BAMS ) เป็นการวัดมุมโดยใช้เลขฐานสองและเลขคณิตจุดคงที่โดยที่การหมุนครบหนึ่งรอบจะแทนด้วยค่า 1
เศษส่วนการหมุนที่ไม่มีเครื่องหมาย
ในระบบนี้ มุมจะถูกแทนด้วย เลขฐาน สอง แบบไม่มีเครื่องหมาย n บิต ในลำดับ 0, ...
เศษส่วนของการหมุนที่มีเครื่องหมาย
อีกทางเลือกหนึ่ง บิต n บิต เดียวกันนี้ยังสามารถตีความได้ว่าเป็นจำนวนเต็มที่มีเครื่องหมายในช่วง −2 n −1 , ..., 2 n −1 −1 ตาม แบบแผน เลขสองส่วน เติมเต็ม นอกจากนี้ยังสามารถตีความได้ว่าเป็นเศษส่วนของการหมุนเต็มรอบระหว่าง −0.5 (รวม) และ +0.
ตัวอย่าง
ในข้อมูลวงโคจรที่ส่งโดย ระบบระบุตำแหน่งทั่วโลก (GPS) มุมต่างๆ จะถูกเข้ารหัสโดยใช้การวัดเชิงมุมแบบไบนารี โดยเฉพาะอย่างยิ่ง ดาวเทียมแต่ละดวงจะส่งข้อมูล วงโคจร ที่มี องค์ประกอบวงโคจร แบบเคปเลอร์ 6 องค์ประกอบ ซึ่ง 4 ใน 6 องค์ประกอบนี้เป็นมุม...