อ่าน 3 นาที
ฐานยึดเส้นศูนย์สูตร
ฐาน ตั้งแบบอิเควทอเรียล เป็นฐานตั้งสำหรับอุปกรณ์ที่ชดเชย การหมุนของโลก โดยมี แกนหมุน หนึ่งแกน เรียกว่า แกนขั้วโลก ขนานกับ แกน หมุน ของโลก [ 1 ] [ 2 ] ฐานตั้งประเภทนี้ใช้สำหรับ...
ฐานยึดเส้นศูนย์สูตร

ฐานตั้งแบบอิเควทอเรียลเป็นฐานตั้งสำหรับอุปกรณ์ที่ชดเชยการหมุนของโลกโดยมีแกนหมุน หนึ่งแกน เรียกว่าแกนขั้วโลกขนานกับ แกน หมุนของโลก[ 1 ] [ 2 ]ฐานตั้งประเภทนี้ใช้สำหรับกล้องโทรทัศน์ ดาราศาสตร์ และกล้องถ่ายภาพ ข้อดีของฐานตั้งแบบอิเควทอเรียลคือความสามารถในการทำให้อุปกรณ์ที่ติดอยู่กับฐานตั้งนั้นสามารถคงอยู่กับที่บนวัตถุท้องฟ้า ใดๆ ที่มีการเคลื่อนที่แบบรายวันได้โดยการขับเคลื่อนแกนหนึ่งด้วยความเร็วคงที่ การจัดเรียงดังกล่าวเรียกว่าการขับเคลื่อนแบบไซเดอเรียลหรือการขับเคลื่อนแบบนาฬิกา ฐานตั้งแบบอิเควทอเรียลบรรลุเป้าหมายนี้โดยการจัดแนวแกนหมุนให้ตรงกับโลก ซึ่ง เป็นกระบวนการที่เรียกว่าการจัดแนวขั้วโลก

ฐานตั้งกล้องโทรทรรศน์ดาราศาสตร์
ในฐานตั้งกล้องโทรทรรศน์ ดาราศาสตร์ แกนเส้นศูนย์สูตร (ไรต์แอสเซนชัน ) จะจับคู่กับแกนการเคลื่อนที่ตั้งฉาก ที่สอง (เรียกว่า เดคลิเนชัน ) แกนเส้นศูนย์สูตรของฐานตั้งมักจะติดตั้ง " ตัวขับนาฬิกา " แบบมอเตอร์ ซึ่งหมุนแกนนั้นหนึ่งรอบทุกๆ 23 ชั่วโมง 56 นาที โดยซิงค์กับการเคลื่อนที่ปรากฏของท้องฟ้าในแต่ละวันอย่างแม่นยำ[ 3 ]นอกจากนี้ยังอาจติดตั้งวงแหวนกำหนดตำแหน่งเพื่อให้สามารถระบุตำแหน่งของวัตถุโดยใช้พิกัดท้องฟ้าได้ฐานตั้งแบบเส้นศูนย์สูตรแตกต่างจากฐานตั้งแบบอัลตาซิมัท ที่มีกลไกง่ายกว่า ซึ่งต้องใช้การเคลื่อนที่ด้วยความเร็วแปรผันรอบทั้งสองแกนเพื่อติดตามวัตถุคงที่บนท้องฟ้า นอกจากนี้ สำหรับการถ่ายภาพดาราศาสตร์ภาพจะไม่หมุนในระนาบโฟกัส ดังเช่นที่เกิดขึ้นกับฐานตั้งแบบอัลตาซิมัทเมื่อถูกนำทางเพื่อติดตามการเคลื่อนที่ของเป้าหมาย เว้นแต่จะติดตั้งปริซึมปรับภาพหมุนหรืออุปกรณ์หมุนภาพอื่นๆ
ฐานตั้งกล้องโทรทรรศน์แบบอิเควทอเรียลมีหลายแบบ ในช่วงยี่สิบปีที่ผ่านมา ระบบติดตามด้วยมอเตอร์ได้ถูกเสริมด้วยระบบระบุตำแหน่งวัตถุด้วยคอมพิวเตอร์มากขึ้นเรื่อยๆ มีสองประเภทหลักๆ คือ ระบบดิจิทัลแบบวงกลม (Digital setting circles) ซึ่งใช้คอมพิวเตอร์ขนาดเล็กที่มีฐานข้อมูลวัตถุเชื่อมต่อกับตัวเข้ารหัส (encoder) คอมพิวเตอร์จะตรวจสอบตำแหน่งของกล้องโทรทรรศน์บนท้องฟ้า ผู้ใช้งานต้องดันกล้องโทรทรรศน์เท่านั้น ส่วนระบบโก-ทู (Go-to system) นั้น (ส่วนใหญ่) ใช้ระบบเฟืองตัวหนอนและเฟืองวงแหวนที่ขับเคลื่อนด้วยมอเตอร์เซอร์โวหรือสเต็ปเปอร์ และผู้ใช้งานไม่จำเป็นต้องสัมผัสเครื่องมือเลยเพื่อเปลี่ยนตำแหน่งบนท้องฟ้า คอมพิวเตอร์ในระบบเหล่านี้มักจะเป็นแบบพกพาใน "แป้นควบคุม" หรือจ่ายไฟผ่านคอมพิวเตอร์แล็ปท็อปที่อยู่ใกล้เคียง ซึ่งใช้ในการจับภาพจากกล้องอิเล็กทรอนิกส์ด้วย ระบบอิเล็กทรอนิกส์ของกล้องโทรทรรศน์สมัยใหม่มักจะมีพอร์ตสำหรับระบบนำทางอัตโนมัติ (autoguided) เครื่องมือพิเศษจะติดตามดาวและปรับตำแหน่งของกล้องโทรทรรศน์ขณะถ่ายภาพท้องฟ้า ในการทำเช่นนั้น ระบบนำทางอัตโนมัติจะต้องสามารถออกคำสั่งผ่านระบบควบคุมของกล้องโทรทรรศน์ได้ คำสั่งเหล่านี้สามารถชดเชยข้อผิดพลาดเล็กน้อยมากในประสิทธิภาพการติดตาม เช่น ข้อผิดพลาดเป็นระยะที่เกิดจากเฟืองตัวหนอนที่ทำให้กล้องโทรทรรศน์เคลื่อนที่
ในการออกแบบหอดูดาวแบบใหม่ ขาตั้งกล้องแบบอิเควทอเรียลไม่เป็นที่นิยมมานานหลายทศวรรษแล้วสำหรับการใช้งานระดับมืออาชีพขนาดใหญ่ เครื่องมือขนาดใหญ่รุ่นใหม่จะมีความเสถียรที่สุดเมื่อติดตั้งในรูปแบบอัลต์-อะซิมุธ (ขึ้นลง ซ้ายขวา) การติดตามด้วยคอมพิวเตอร์และการปรับแก้ภาพนั้นทำได้ไม่ยากในระดับมืออาชีพ อย่างไรก็ตาม ในระดับมือสมัครเล่น ขาตั้งกล้องแบบอิเควทอเรียลยังคงเป็นที่นิยม โดยเฉพาะอย่างยิ่งสำหรับการถ่ายภาพดาราศาสตร์
ภูเขาเส้นศูนย์สูตรเยอรมัน

ใน ฐานตั้ง กล้องโทรทรรศน์แบบเส้นศูนย์สูตรของเยอรมัน [ 4 ] (บางครั้งเรียกสั้นๆ ว่า " GEM ") โครงสร้างหลักมีรูป ทรงตัว Tโดยที่แท่งด้านล่างเป็น แกนไรต์ แอสเซนชัน (แกนทแยงมุมล่างในภาพ) และแท่งด้านบนเป็น แกน เดคลิเนชัน (แกนทแยงมุมบนในภาพ) ฐานตั้งนี้ได้รับการพัฒนาโดยโจเซฟ ฟอน ฟราวน์โฮเฟอร์ สำหรับกล้องโทรทรรศน์หักเหแสงดอร์แพตขนาดใหญ่[ 5 ]ซึ่งสร้างเสร็จในปี 1824 กล้องโทรทรรศน์ถูกวางไว้ที่ปลายด้านหนึ่งของแกนเดคลิเนชัน (บนซ้ายในภาพ) และมีตุ้มถ่วงที่เหมาะสมวางไว้ที่ปลายอีกด้านหนึ่ง (ล่างขวา) แกนไรต์แอสเซนชันมีแบริ่งอยู่ด้านล่างข้อต่อรูปตัว T นั่นคือ ไม่ได้รับการรองรับเหนือแกนเดคลิเนชัน
ตัวยึดตะเกียบแบบเปิด

ฐาน ยึด แบบง่ามเปิดมีง่ามที่ติดอยู่กับแกนไรต์แอสเซนชันที่ฐาน กล้องโทรทรรศน์ติดอยู่กับจุดหมุนสองจุดที่ปลายอีกด้านของง่ามเพื่อให้สามารถแกว่งในเดคลิเนชันได้ กล้องโทรทรรศน์สะท้อนแสง แบบแคทาไดออปทริก ที่ผลิตจำนวนมากในปัจจุบันส่วนใหญ่ (เส้นผ่านศูนย์กลาง 200 มม. หรือใหญ่กว่า) มักจะเป็นประเภทนี้ ฐานยึดมีลักษณะคล้ายกับฐานยึดแบบอัลตาซิมุธแต่แกนอะซิมุธจะเอียงและจัดเรียงให้ตรงกับแกนการหมุนของโลกด้วยชิ้นส่วนฮาร์ดแวร์ที่มักเรียกว่า "ลิ่ม" [ 6 ]
กล้องโทรทัศน์ระดับมืออาชีพขนาดกลางหลายรุ่นมีขาตั้งแบบอิเควทอเรียลซึ่งโดยทั่วไปจะมีเส้นผ่านศูนย์กลางอยู่ในช่วง 0.5-2.0 เมตร
ฐานยึดแบบอังกฤษหรือแบบแอก

ฐานยึดแบบอังกฤษหรือฐานยึดแบบYoke [ 7 ]มีโครงหรือ " yoke " ที่มี แบริ่งแกนไรต์ แอสเซนชันที่ปลายด้านบนและด้านล่าง และมีกล้องโทรทรรศน์ติดอยู่ภายในจุดกึ่งกลางของ yoke ทำให้สามารถแกว่งไปตาม แกน เดคลิเนชันได้ โดยปกติกล้องโทรทรรศน์จะถูกติดตั้งไว้ภายในส้อมทั้งหมด แม้ว่าจะมีข้อยกเว้น เช่น กล้องโทรทรรศน์สะท้อนแสง Mount Wilson ขนาด 2.5 เมตรและไม่มีตุ้มถ่วงน้ำหนักเหมือนกับฐานยึดแบบเยอรมัน
การออกแบบกล้องโทรทรรศน์แบบง่าม ดั้งเดิมของอังกฤษมีข้อเสียตรงที่ไม่สามารถชี้กล้องโทรทรรศน์ไปใกล้ขั้วฟ้าเหนือหรือขั้วฟ้าใต้ได้มากนัก
ฐานรูปเกือกม้า
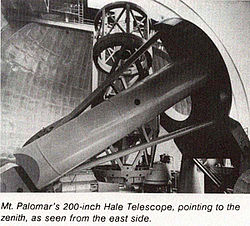
ฐานยึดรูปเกือกม้าช่วยแก้ไขข้อเสียด้านการออกแบบของฐานยึดแบบอังกฤษหรือแบบแอก โดยการแทนที่แบริ่งขั้วโลกด้วยโครงสร้าง "เกือกม้า" แบบเปิด เพื่อให้กล้องโทรทรรศน์สามารถเข้าถึงดาวเหนือและดาวใกล้เคียงได้กล้องโทรทรรศน์เฮลเป็นตัวอย่างที่โดดเด่นที่สุดของฐานยึดรูปเกือกม้าที่ใช้งานอยู่[ 8 ]
การติดตั้งแกนขวาง

แท่นยึดแกนไขว้[ 8 ]หรือ แท่นยึด แกนไขว้แบบอังกฤษมีลักษณะคล้ายเครื่องหมาย "บวก" ขนาดใหญ่ ( + ) แกนไรต์ แอสเซนชันได้รับการรองรับที่ปลายทั้งสองข้าง และ แกนเด คลิเนชันจะติดอยู่กับแกนนี้ที่จุดกึ่งกลางโดยประมาณ โดยมีกล้องโทรทรรศน์อยู่ที่ปลายด้านหนึ่งของแกนเดคลิเนชัน และมีตุ้มถ่วงน้ำหนักอยู่ที่ปลายอีกด้านหนึ่ง
แพลตฟอร์มเส้นศูนย์สูตร
แพลตฟอร์มเส้นศูนย์สูตรเป็นแพลตฟอร์มที่ออกแบบมาเป็นพิเศษซึ่งช่วยให้อุปกรณ์ใดๆ ที่วางอยู่บนนั้นสามารถติดตามตามแกนเส้นศูนย์สูตรได้[ 9 ]โดยทำได้โดยการมีพื้นผิวที่หมุนรอบ "แกนขั้วโลกเสมือน" ซึ่งทำให้สามารถติดตามตามเส้นศูนย์สูตรได้กับทุกสิ่งบนแพลตฟอร์ม ตั้งแต่กล้องขนาดเล็กไปจนถึงอาคารหอดูดาวทั้งหลัง แพลตฟอร์มเหล่านี้มักใช้กับ กล้องโทรทรรศน์ ดาราศาสตร์สมัครเล่นที่ติดตั้งแบบอัลตาซิมุธ เช่นกล้องโทรทรรศน์แบบดอบโซเนียน ทั่วไป เพื่อเอาชนะข้อจำกัดของการติดตั้งแบบนั้นที่ไม่สามารถติดตามท้องฟ้ายามค่ำคืนได้
ดูเพิ่มเติม
- ขาตั้งกล้องแบบอัลตาซิมุธ
- เครื่องติดตามประตูยุ้งฉาง
- ห้องเส้นศูนย์สูตร
- กล้องโทรทรรศน์หกขา
- รายการชิ้นส่วนและโครงสร้างของกล้องโทรทรรศน์
- รายชื่อประเภทของกล้องโทรทรรศน์
- มุมขนาน
- ฐานยึดแบบขั้วโลก - ฐานยึดแบบเดียวกับที่ใช้กับจานรับสัญญาณดาวเทียม
- แพลตฟอร์มปองเซต์
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ฐานยึดเส้นศูนย์สูตร
ฐาน ตั้งแบบอิเควทอเรียล เป็นฐานตั้งสำหรับอุปกรณ์ที่ชดเชย การหมุนของโลก โดยมี แกนหมุน หนึ่งแกน เรียกว่า แกนขั้วโลก ขนานกับ แกน หมุน ของโลก [ 1 ] [ 2 ] ฐานตั้งประเภทนี้ใช้สำหรับ...
ฐานตั้งกล้องโทรทรรศน์ดาราศาสตร์
ใน ฐานตั้งกล้องโทรทรรศน์ ดาราศาสตร์ แกนเส้นศูนย์สูตร (ไร ต์แอสเซนชัน ) จะจับคู่กับ แกน การเคลื่อนที่ ตั้งฉาก ที่สอง (เรียกว่า เดคลิเนชัน ) แกนเส้นศูนย์สูตรของฐานตั้งมักจะติดตั้ง " ตัวขับนาฬิกา " แบบมอเตอร์ ซึ่งหมุนแกนนั้นหนึ่งรอบทุกๆ 23 ชั่วโมง 56 นาที...
ภูเขาเส้นศูนย์สูตรเยอรมัน
ใน ฐานตั้ง กล้องโทรทรรศน์ แบบเส้นศูนย์สูตรของเยอรมัน [ 4 ] (บางครั้งเรียกสั้นๆ ว่า " GEM ") โครงสร้างหลักมีรูป ทรงตัว T โดยที่แท่งด้านล่างเป็น แกนไรต์ แอสเซนชัน (แกนทแยงมุมล่างในภาพ) และแท่งด้านบนเป็น แกน เดคลิเนชัน (แกนทแยงมุมบนในภาพ)...
ตัวยึดตะเกียบแบบเปิด
ฐาน ยึด แบบง่ามเปิด มี ง่าม ที่ติดอยู่กับแกนไรต์แอสเซนชันที่ฐาน กล้องโทรทรรศน์ติดอยู่กับจุดหมุนสองจุดที่ปลายอีกด้านของง่ามเพื่อให้สามารถแกว่งในเดคลิเนชันได้ กล้องโทรทรรศน์สะท้อนแสง แบบแคทาไดออปทริก ที่ผลิตจำนวนมากในปัจจุบันส่วนใหญ่ (เส้นผ่านศูนย์กลาง 200 มม.