อ่าน 8 นาที
ความเร็วเชิงมุม
ใน จ ล ศาสตร์ ความเร็วเชิงมุม (สัญลักษณ์ ω หรือ ω ซึ่ง เป็น ω → {\displaystyle {\vec {\โอเมก้า }}} อักษรกรีกตัวเล็ก โอเมกา ) หรือที่รู้จักกันในชื่อ เวกเตอร์ความถี่เชิงมุม...
ความเร็วเชิงมุม
| ความเร็วเชิงมุม | |
|---|---|
 | |
สัญลักษณ์ทั่วไป | ω |
| หน่วย SI | เรเดียน⋅วินาที−1 |
| ในหน่วยฐาน SI | s −1 |
| กว้างขวาง ? | ใช่ |
| หลักสูตรเข้มข้น ? | ใช่ (สำหรับวัตถุแข็งเท่านั้น) |
| อนุรักษ์ไว้ ? | เลขที่ |
พฤติกรรมภายใต้การแปลงพิกัด | เวกเตอร์เทียม |
อนุพันธ์จากปริมาณอื่นๆ | ω = d θ / d t |
| มิติ | |

| ส่วนหนึ่งของชุดบทความเกี่ยวกับ |
| กลศาสตร์คลาสสิก |
|---|
|

ใน จ ลศาสตร์ความเร็วเชิงมุม (สัญลักษณ์ωหรือω ซึ่ง เป็นอักษรกรีกตัวเล็กโอเมกา ) หรือที่รู้จักกันในชื่อเวกเตอร์ความถี่เชิงมุมคือเวกเตอร์ยูคลิดสามมิติที่ระบุระนาบ ทิศทาง และความเร็วเชิงมุมของการหมุนของอนุภาคที่หมุนเป็นวงกลมด้วยความเร็วคงที่ในสามมิติได้อย่างเฉพาะเจาะจง

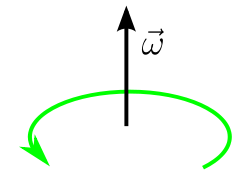
ทิศทางจะตั้งฉาก กับ ระนาบการหมุนทันทีทิศทางของความเร็วเชิงมุมโดยทั่วไปจะระบุโดยกฎมือขวาซึ่งหมายถึง การหมุน ตามเข็มนาฬิกา (เมื่อมองจากระนาบการหมุน) การปฏิเสธ (การคูณด้วย −1) จะทำให้ขนาดไม่เปลี่ยนแปลง แต่จะพลิกแกนไปในทิศทางตรงกันข้าม[ 1 ]

ขนาดของเวกเตอร์นี้แสดงถึงความเร็วเชิงมุมซึ่งเป็นอัตราเชิงมุมที่วัตถุหมุน (หมุนรอบตัวเองหรือโคจร)

ความเร็วเชิงมุมที่กล่าวมาข้างต้นสำหรับอนุภาคจุด เรียกว่า ความเร็วเชิงมุมวงโคจร วัตถุแข็งเกร็งที่หมุนรอบแกนคงที่นั้น แต่ละจุดบนวัตถุจะมีค่าความเร็วเชิงมุมวงโคจรเท่ากัน ดังนั้น วัตถุแข็งเกร็งดังกล่าวจึงสามารถมีความเร็วเชิงมุม (เรียกว่า ความเร็วเชิงมุมสปิน) เท่ากับความเร็วเชิงมุมวงโคจรของแต่ละจุดบนวัตถุได้
ความเร็วเชิงมุม ดังที่ได้กล่าวไว้ข้างต้นสำหรับการหมุนในวงกลมคงที่ด้วยความเร็วคงที่ สามารถนำไปใช้กับการเคลื่อนที่ทั่วไปในสามมิติได้ โดยเฉพาะอย่างยิ่ง เนื่องจากความเร็วเชิงมุมของอนุภาคที่หมุนในวงกลมคงที่ในสามมิติด้วยความเร็วคงที่สามารถกำหนดได้จากตำแหน่งของอนุภาคเทียบกับจุดศูนย์กลางของวงกลมและความเร็วของมัน ดังนั้น ความเร็วเชิงมุมของอนุภาคที่มีตำแหน่งในสามมิติที่สามารถหาอนุพันธ์ได้สองครั้งอย่างต่อเนื่องเทียบกับเวลา จึงสามารถกำหนดได้ในลักษณะเดียวกันจากตำแหน่งของอนุภาคจากจุดศูนย์กลางความโค้งและความเร็วของมัน
ความเร็วเชิงมุมมีมิติเป็นต่อหน่วยเวลาหน่วย SIของความเร็วเชิงมุมคือเรเดียนต่อวินาที[ 2 ]เรเดียนเป็นปริมาณที่ไม่มีมิติดังนั้นหน่วย SI ของความเร็วเชิงมุมจึงมีมิติเทียบเท่ากับวินาทีผกผัน s −1แม้ว่า rad/s จะเป็นที่นิยมมากกว่าเพื่อหลีกเลี่ยงความสับสนกับความเร็วในการหมุนในหน่วยเฮิรตซ์ (ซึ่งเทียบเท่ากับ s −1 เช่นกัน ) [ 3 ]
ตัวอย่างเช่น ดาวเทียมวง โคจรค้างฟ้าโคจรครบหนึ่งรอบต่อวัน ดาราศาสตร์ เหนือเส้นศูนย์สูตร (ประมาณ 360 องศาต่อ 24 ชั่วโมง) [ a ]มีขนาดความเร็วเชิงมุม (ความเร็วเชิงมุม) ω = 360°/24 h = 15°/h (หรือ 2π เรเดียน/24 h ≈ 0.26 เรเดียน/h) และทิศทางความเร็วเชิงมุม ( เวกเตอร์หน่วย ) ขนานกับแกนหมุนของโลก ( ในระบบพิกัดศูนย์กลางโลก ) ถ้าวัดมุมเป็นเรเดียน ความเร็วเชิงเส้นคือรัศมีคูณด้วยความเร็วเชิงมุมโดยมีรัศมีวงโคจร เนื่องจากดาวเทียมอยู่ห่างจากศูนย์กลางโลก 42,000 กิโลเมตร ความเร็วสัมผัสของดาวเทียมในอวกาศจึงเป็นv =42,000 กม. × 0.26/ชม. ≈11,000 กม ./ชม . ความเร็วเชิงมุมเป็นค่าบวก เนื่องจากดาวเทียมเคลื่อนที่ไปในทิศทางเดียวกับการหมุนของโลก (ทิศทางเดียวกับการหมุนของโลก)


ความเร็วเชิงมุมวงโคจรของอนุภาคจุด
อนุภาคในสองมิติ

ในกรณีที่ง่ายที่สุดของการเคลื่อนที่แบบวงกลมที่รัศมี โดยที่ตำแหน่งกำหนดโดยการกระจัดเชิงมุมจากแกน x ความเร็วเชิงมุมวงโคจรคืออัตราการเปลี่ยนแปลงของมุมเทียบกับเวลา: ถ้าวัดเป็นเรเดียน ความยาวส่วนโค้งจาก แกน x บวกไปรอบวงกลมถึงอนุภาคคือ และความเร็วเชิงเส้นคือ ดังนั้น







โดยทั่วไปแล้ว ในกรณีอนุภาคเคลื่อนที่ในระนาบ ความเร็วเชิงมุมวงโคจรคืออัตราที่เวกเตอร์ตำแหน่งสัมพันธ์กับจุดกำเนิดที่เลือก "กวาด" ออกไปเป็นมุม แผนภาพแสดงเวกเตอร์ตำแหน่งจากจุดกำเนิดไปยังอนุภาค พร้อมด้วยพิกัดเชิงขั้ว (ตัวแปรทั้งหมดเป็นฟังก์ชันของเวลา ) อนุภาคมีการแยกความเร็วเชิงเส้นเป็น โดยส่วนประกอบแนวรัศมีขนานกับรัศมี และส่วนประกอบแนวขวางรัศมี (หรือแนวสัมผัส) ตั้งฉากกับรัศมี เมื่อไม่มีส่วนประกอบแนวรัศมี อนุภาคจะเคลื่อนที่รอบจุดกำเนิดเป็นวงกลม แต่เมื่อไม่มีส่วนประกอบแนวขวางรัศมี มันจะเคลื่อนที่เป็นเส้นตรงจากจุดกำเนิด เนื่องจากการเคลื่อนที่ในแนวรัศมีทำให้มุมไม่เปลี่ยนแปลง ดังนั้นเฉพาะส่วนประกอบแนวขวางรัศมีของความเร็วเชิงเส้นเท่านั้นที่ส่งผลต่อความเร็วเชิงมุม








ความเร็วเชิงมุมωคืออัตราการเปลี่ยนแปลงของตำแหน่งเชิงมุมเทียบกับเวลา ซึ่งสามารถคำนวณได้จากความเร็วในแนวขวางรัศมีดังนี้:

ในที่นี้ ความเร็วในแนวขวางรัศมีคือขนาดที่มีเครื่องหมายของ ซึ่งเป็นบวกสำหรับการเคลื่อนที่ทวนเข็มนาฬิกา และเป็นลบสำหรับการเคลื่อนที่ตามเข็มนาฬิกา การใช้พิกัดเชิงขั้วสำหรับความเร็วเชิงเส้นจะให้ขนาด(ความเร็วเชิงเส้น) และมุมเทียบกับเวกเตอร์รัศมี ในแง่เหล่านี้ ดังนั้น






สูตรเหล่านี้สามารถหาได้โดยการใช้ ซึ่งเป็นฟังก์ชันของระยะห่างจากจุดกำเนิดเทียบกับเวลา และเป็นฟังก์ชันของมุมระหว่างเวกเตอร์กับแกน x จากนั้น: ซึ่งเท่ากับ: (ดูเวกเตอร์หน่วยในพิกัดทรงกระบอก)




เมื่อทราบค่าดัง กล่าวแล้ว เราจึงสรุปได้ว่า ส่วนประกอบแนวรัศมีของความเร็วมีค่าเท่ากับเนื่องจากเป็นเวกเตอร์หน่วยแนวรัศมี และส่วนประกอบแนวตั้งฉากมีค่าเท่ากับเนื่องจากเป็นเวกเตอร์หน่วยแนวตั้งฉาก





ในสองมิติ ความเร็วเชิงมุมเป็นตัวเลขที่มีเครื่องหมายบวกหรือลบเพื่อบ่งบอกถึงทิศทาง แต่ไม่ได้ชี้ไปยังทิศทางใดทิศทางหนึ่ง โดยทั่วไปแล้ว เครื่องหมายจะเป็นบวกหากเวกเตอร์รัศมีหมุนทวนเข็มนาฬิกา และเป็นลบหากหมุนตามเข็มนาฬิกา ดังนั้น ความเร็วเชิงมุมจึงอาจเรียกว่า ปริมาณ เสมือนสเกลาร์ซึ่งเป็นปริมาณเชิงตัวเลขที่เปลี่ยนเครื่องหมายภายใต้การผกผันพาริตีเช่น การกลับแกนหนึ่งแกนหรือการสลับแกนทั้งสอง
อนุภาคในสามมิติ

ใน ปริภูมิสามมิติเรามีเวกเตอร์ตำแหน่งrของอนุภาคที่เคลื่อนที่อีกครั้ง ในที่นี้ ความเร็วเชิงมุมวงโคจรเป็นเวกเตอร์เสมือนที่มีขนาดเท่ากับอัตราที่rกวาดมุมไป (ในหน่วยเรเดียนต่อหน่วยเวลา) และมีทิศทางตั้งฉากกับระนาบ ณ ขณะนั้นที่rกวาดมุมไป (นั่นคือระนาบที่เกิดจากrและv ) อย่างไรก็ตาม เนื่องจากมีสองทิศทางที่ตั้งฉากกับระนาบใดๆ จึงจำเป็นต้องมีเงื่อนไขเพิ่มเติมเพื่อระบุทิศทางของความเร็วเชิงมุมอย่างเฉพาะเจาะจง โดยทั่วไปจะใช้ กฎมือขวา
ให้เวกเตอร์เสมือนเป็นเวกเตอร์หน่วยที่ตั้งฉากกับระนาบที่เกิดจากrและvเพื่อให้เป็นไปตามกฎมือขวา (กล่าวคือ ทิศทางการกระจัดเชิงมุม ณ ขณะนั้นจะเป็นทวนเข็มนาฬิกาเมื่อมองจากด้านบนของ ) เมื่อใช้พิกัดเชิงขั้วในระนาบนี้ เช่นเดียวกับในกรณีสองมิติข้างต้น เราสามารถกำหนดเวกเตอร์ความเร็วเชิงมุมวงโคจรได้ดังนี้:


โดยที่ คือมุมระหว่าง และ ในแง่ของผลคูณเวกเตอร์ จะได้ดังนี้:

จากสมการข้างต้น เราสามารถหาความเร็วสัมผัสได้ดังนี้:

ความเร็วเชิงมุมการหมุนของวัตถุแข็งหรือกรอบอ้างอิง
ในกรอบอ้างอิงที่หมุนได้ซึ่งประกอบด้วยเวกเตอร์พิกัดหน่วยสามตัวที่เป็นอิสระเชิงเส้น ในแต่ละขณะ จะมีแกนร่วม (เรียกว่าแกนหมุน) เสมอ ซึ่งเวกเตอร์ทั้งสามจะหมุนรอบแกนนี้ด้วยความเร็วเชิงมุมเท่ากันและในทิศทางเชิงมุมเดียวกัน (ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา) ในกรอบอ้างอิงดังกล่าว เวกเตอร์แต่ละตัวอาจถือได้ว่าเป็นอนุภาคเคลื่อนที่ที่มีรัศมีสเกลาร์คงที่ กลุ่มของอนุภาคดังกล่าวเรียกว่าวัตถุแข็งเกร็ง
ทฤษฎีบทการหมุนของออยเลอร์กล่าวว่า ในกรอบอ้างอิงที่หมุนได้ แกนการหมุนที่ได้จากการเลือกเวกเตอร์หน่วยอิสระเชิงเส้นสามตัวแบบหนึ่ง จะเหมือนกับแกนการหมุนที่ได้จากการเลือกแบบอื่น ๆ กล่าวคือ มีแกนการหมุนชั่วขณะ เพียงแกน เดียว สำหรับกรอบอ้างอิงนั้น ซึ่งจุดทุกจุดจะหมุนรอบแกนนี้ด้วยความเร็วเชิงมุมเดียวกันและในทิศทางเชิงมุมเดียวกัน (ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา) ความเร็วเชิงมุมของการหมุนของกรอบอ้างอิงหรือวัตถุแข็งเกร็งถูกกำหนดให้เป็นเวกเตอร์เสมือนที่มีขนาดเท่ากับความเร็วเชิงมุมร่วมนี้ และมีทิศทางไปตามแกนการหมุนร่วมตามกฎมือขวา (กล่าวคือ สำหรับการหมุนทวนเข็มนาฬิกา มันจะชี้ "ขึ้น" ตามแกน ในขณะที่สำหรับการหมุนตามเข็มนาฬิกา มันจะชี้ "ลง")
ในมิติเชิงพื้นที่ที่ใหญ่กว่า 3 มิติ การตีความความเร็วเชิงมุมของการหมุนในฐานะเวกเตอร์เสมือนนั้นไม่ถูกต้อง อย่างไรก็ตาม อาจสามารถอธิบายได้ด้วยวัตถุประเภททั่วไปที่เรียกว่าเทนเซอร์ อันดับ 2 ที่ ไม่สมมาตร
การบวกเวกเตอร์ความเร็วเชิงมุมสำหรับเฟรมต่างๆ นั้นถูกกำหนดโดยการบวกเวกเตอร์ตามปกติ (การประกอบการเคลื่อนที่เชิงเส้น) และมีประโยชน์ในการแยกส่วนการหมุน เช่นเดียวกับในกิมบอลส่วนประกอบทั้งหมดของเวกเตอร์สามารถคำนวณได้จากอนุพันธ์ของพารามิเตอร์ที่กำหนดเฟรมที่เคลื่อนที่ (มุมออยเลอร์หรือเมทริกซ์การหมุน) เช่นเดียวกับในกรณีทั่วไป การบวกนั้นมีคุณสมบัติการสลับที่ได้: .

ถ้าเราเลือกจุดอ้างอิงที่ตรึงอยู่กับที่ในกรอบอ้างอิงที่หมุน ความเร็วของจุดใดๆ ในกรอบอ้างอิงนั้นจะกำหนดโดย



ส่วนประกอบจากเวกเตอร์ฐานของกรอบอ้างอิงที่ยึดติดกับตัววัตถุ
พิจารณาวัตถุแข็งเกร็งที่หมุนรอบจุดคงที่ O สร้างกรอบอ้างอิงภายในวัตถุซึ่งประกอบด้วยชุดเวกเตอร์ตั้งฉากกันที่ยึดติดกับวัตถุและมีจุดกำเนิดร่วมอยู่ที่ O เวกเตอร์ความเร็วเชิงมุมของการหมุนของทั้งกรอบอ้างอิงและวัตถุรอบ O คือ


โดยที่คืออัตราการเปลี่ยนแปลงของเวกเตอร์เฟรมต่อเวลา อันเนื่องมาจากการหมุน


สูตรนี้ไม่สอดคล้องกับนิพจน์สำหรับความเร็วเชิงมุมวง โคจร

เนื่องจากสูตรดังกล่าวใช้กำหนดความเร็วเชิงมุมสำหรับจุดเดียวรอบจุด O ในขณะที่สูตรในส่วนนี้ใช้กับกรอบอ้างอิงหรือวัตถุแข็งเกร็ง ในกรณีของวัตถุแข็งเกร็งจะต้องคำนึงถึงการเคลื่อนที่ของ อนุภาค ทั้งหมดในวัตถุ ด้วย

ส่วนประกอบจากมุมออยเลอร์

ส่วนประกอบของเวกเตอร์เสมือนความเร็วเชิงมุมการหมุนถูกคำนวณครั้งแรกโดยเลออนฮาร์ด ออยเลอร์โดยใช้มุมออยเลอร์และกรอบอ้างอิงกลาง:
- แกนหนึ่งของกรอบอ้างอิง (แกนการหมุนควง)
- เส้นของจุดศูนย์ถ่วงของเฟรมเคลื่อนที่เทียบกับเฟรมอ้างอิง (แกนการสั่นไหว)
- แกนหนึ่งของกรอบอ้างอิงที่เคลื่อนที่ (แกนการหมุนภายใน)
ออยเลอร์พิสูจน์ว่าการฉายภาพของเวกเตอร์ความเร็วเชิงมุมเทียมบนแกนทั้งสามนี้คืออนุพันธ์ของมุมที่เกี่ยวข้อง (ซึ่งเทียบเท่ากับการแยกการหมุนทันทีออกเป็นการหมุนออยเลอร์ ทันทีสามครั้ง ) ดังนั้น: [ 5 ]

ฐานนี้ไม่ใช่ฐานตั้งฉากปกติและใช้งานยาก แต่ตอนนี้เวกเตอร์ความเร็วสามารถเปลี่ยนไปใช้เฟรมคงที่หรือเฟรมเคลื่อนที่ได้โดยการเปลี่ยนฐานเท่านั้น ตัวอย่างเช่น การเปลี่ยนไปใช้เฟรมเคลื่อนที่:

โดยที่เป็นเวกเตอร์หน่วยสำหรับกรอบอ้างอิงที่ตรึงอยู่กับที่ในตัวอย่างที่เคลื่อนที่ ตัวอย่างนี้สร้างขึ้นโดยใช้แบบแผน ZXZ สำหรับมุมออยเลอร์

เทนเซอร์
เทนเซอร์ความเร็วเชิงมุมเป็นเมทริกซ์สมมาตรเฉียงที่กำหนดโดย:

ค่าสเกลาร์ข้างต้นสอดคล้องกับส่วนประกอบ ของเวกเตอร์ความเร็วเชิงมุม

นี่คือเมทริกซ์การหมุนขนาดเล็กมากการแมปเชิงเส้น Ω ทำหน้าที่เหมือนผลคูณเชิงเวกเตอร์ :


โดยที่เป็น เวก เตอร์ ตำแหน่ง

เมื่อคูณด้วยผลต่างของเวลา จะได้เป็น เท น เซอร์การกระจัดเชิงมุม
ดูเพิ่มเติม
- ความเร่งเชิงมุม
- ความถี่เชิงมุม
- โมเมนตัมเชิงมุม
- ความเร็วเชิงพื้นที่
- ไจโรสโคป
- สมการการเคลื่อนที่ของลูกสูบ
- ไอโซเมตรี
- กลุ่มออร์โธโกนอล
- พลศาสตร์ของวัตถุแข็ง
- การหมุนวน
หมายเหตุ
- ^วันดาราศาสตร์สั้นกว่าวันสุริยคติประมาณ 4 นาที คือ 23 ชั่วโมง 56 นาที 04 วินาที แต่ในตัวอย่างนี้ใช้ 24 ชั่วโมงเพื่อให้ง่ายต่อการเขียน
ลิงก์ภายนอก
- หนังสือเรียนฟิสิกส์ระดับมหาวิทยาลัยโดย อาร์เธอร์ ลาลานน์ คิมบอล ( ความเร็วเชิงมุมของอนุภาค )
- Pickering, Steve (2009). "ω ความเร็วในการหมุน [ความเร็วเชิงมุม]" . Sixty Symbols . Brady Haranสำหรับมหาวิทยาลัยนอตติงแฮม .
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ความเร็วเชิงมุม
ใน จ ล ศาสตร์ ความเร็วเชิงมุม (สัญลักษณ์ ω หรือ ω ซึ่ง เป็น ω → {\displaystyle {\vec {\โอเมก้า }}} อักษรกรีกตัวเล็ก โอเมกา ) หรือที่รู้จักกันในชื่อ เวกเตอร์ความถี่เชิงมุม...
อนุภาคในสองมิติ
ในกรณีที่ง่ายที่สุดของการเคลื่อนที่แบบวงกลมที่รัศมี ร {\displaystyle r} โดยที่ตำแหน่งกำหนดโดยการกระจัดเชิงมุมจากแกน x ความเร็วเชิงมุมวงโคจรคืออัตราการเปลี่ยนแปลงของมุมเทียบกับเวลา: ถ้าวัดเป็น เรเดียน ความยาวส่วนโค้งจาก แกน x บวกไปรอบวงกลมถึงอนุภาคคือ...
อนุภาคในสามมิติ
ใน ปริภูมิสามมิติ เรามีเวกเตอร์ตำแหน่ง r ของอนุภาคที่เคลื่อนที่อีกครั้ง ในที่นี้ ความเร็วเชิงมุมวงโคจรเป็นเวก เตอร์เสมือน ที่มีขนาดเท่ากับอัตราที่ r กวาดมุมไป (ในหน่วยเรเดียนต่อหน่วยเวลา) และมีทิศทางตั้งฉากกับระนาบ ณ ขณะนั้นที่ r กวาดมุมไป...
ความเร็วเชิงมุมการหมุนของวัตถุแข็งหรือกรอบอ้างอิง
ในกรอบอ้างอิงที่หมุนได้ซึ่งประกอบด้วยเวกเตอร์พิกัดหน่วยสามตัวที่เป็นอิสระเชิงเส้น ในแต่ละขณะ จะมีแกนร่วม (เรียกว่าแกนหมุน) เสมอ ซึ่งเวกเตอร์ทั้งสามจะหมุนรอบแกนนี้ด้วยความเร็วเชิงมุมเท่ากันและในทิศทางเชิงมุมเดียวกัน (ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกา)...