อ่าน 7 นาที
การควบคุมแบบมุ่งเน้นสนาม
การควบคุมแบบ Field-oriented control ( FOC ) หรือที่เรียกว่าvector controlเป็น วิธีการควบคุม ไดรฟ์ความถี่แปรผัน (VFD) ซึ่ง กระแส สเตเตอร์ของมอเตอร์ AC สามเฟส (เช่นBLDC )...
การควบคุมแบบมุ่งเน้นสนาม
การควบคุมแบบ Field-oriented control ( FOC ) หรือที่เรียกว่าvector controlเป็น วิธีการควบคุม ไดรฟ์ความถี่แปรผัน (VFD) ซึ่ง กระแส สเตเตอร์ของมอเตอร์ AC สามเฟส (เช่นBLDC ) จะถูกระบุเป็น ส่วนประกอบ ตั้งฉาก สอง ส่วนที่สามารถมองเห็นได้ด้วยเวกเตอร์ส่วนประกอบหนึ่งกำหนดฟลักซ์แม่เหล็กของมอเตอร์ อีก ส่วนประกอบหนึ่งกำหนด แรงบิดการควบคุมฟลักซ์ แม่เหล็ก ในไดรฟ์ไฟฟ้าบางครั้งเรียกว่าการควบคุมฟลักซ์ ซึ่งหมายถึงการควบคุมฟลักซ์และแรงบิดแบบแยกส่วนในระบบควบคุมแบบ field-oriented control ระบบควบคุมของไดรฟ์จะคำนวณค่าอ้างอิงส่วนประกอบกระแสที่สอดคล้องกันจากค่าอ้างอิงฟลักซ์และแรงบิดที่กำหนดโดยการควบคุมความเร็ว ของไดรฟ์ โดย ทั่วไป จะใช้ ตัวควบคุมแบบสัดส่วน-อินทิกรัล (PI)เพื่อรักษาส่วนประกอบกระแสที่วัดได้ให้อยู่ที่ค่าอ้างอิง การมอดูเลชั่นความกว้างพัลส์ของไดรฟ์ความถี่แปรผันจะกำหนดการ สลับ ทรานซิสเตอร์ตามค่าอ้างอิงแรงดันสเตเตอร์ที่เป็นเอาต์พุตของตัวควบคุมกระแส PI [ 1 ]
FOC ใช้สำหรับควบคุม มอเตอร์ ซิงโครนัสและมอเตอร์เหนี่ยวนำAC [ 2 ]เดิมทีพัฒนาขึ้นเพื่อใช้กับมอเตอร์ประสิทธิภาพสูงที่ต้องทำงานได้อย่างราบรื่นตลอด ช่วง ความเร็วสร้างแรงบิด เต็มที่ ที่ความเร็วศูนย์และมีประสิทธิภาพไดนามิกสูง รวมถึงการเร่งความเร็วและการลดความเร็วอย่างรวดเร็วอย่างไรก็ตาม กำลังเป็นที่น่าสนใจมากขึ้นสำหรับการใช้งานที่มีประสิทธิภาพต่ำกว่าเช่นกัน เนื่องจาก FOC มีข้อดีในการลด ขนาดมอเตอร์ ต้นทุน และ การใช้พลังงาน[ 3 ] [ 4 ]คาดว่าด้วยกำลังการประมวลผลของไมโครโปรเซสเซอร์ที่เพิ่มขึ้น ในที่สุดมันจะเข้ามาแทนที่การควบคุมแบบสเกลาร์ ตัวแปรเดียว ( โวลต์ต่อเฮิรตซ์ , การควบคุม V/f) เกือบทั้งหมด [ 5 ] [ 6 ]
ประวัติการพัฒนา

K. Hasse จาก Technische Universität Darmstadt และ F. Blaschke จาก Siemens เป็นผู้บุกเบิก การควบคุม เวกเตอร์ของมอเตอร์ AC ตั้งแต่ปี 1968 และช่วงต้นทศวรรษ 1970 โดย Hasse เสนอการควบคุมเวกเตอร์ทางอ้อม และ Blaschke เสนอการควบคุมเวกเตอร์โดยตรง[ 7 ] [ 8 ] Werner Leonhard จาก Technical University Braunschweig ได้พัฒนาเทคนิค FOC เพิ่มเติม และมีบทบาทสำคัญในการเปิดโอกาสให้ไดรฟ์ ACเป็นทางเลือกที่แข่งขันได้กับ ไดร ฟ์DC [ 9 ] [ 10 ]
อย่างไรก็ตาม จนกระทั่งหลังจากการวางจำหน่ายไมโครโปรเซสเซอร์ในเชิงพาณิชย์ ซึ่งก็คือในช่วงต้นทศวรรษ 1980 ไดรฟ์ AC อเนกประสงค์จึงเริ่มวางจำหน่าย[ 11 ] [ 12 ]อุปสรรคในการใช้ FOC สำหรับการใช้งานไดรฟ์ AC ได้แก่ ต้นทุนและความซับซ้อนที่สูงกว่า และการบำรุงรักษาที่ต่ำกว่าเมื่อเทียบกับไดรฟ์ DC เนื่องจาก FOC ในขณะนั้นต้องการส่วนประกอบอิเล็กทรอนิกส์จำนวนมากในแง่ของเซ็นเซอร์ แอมพลิฟายเออร์ และอื่นๆ[ 13 ]
การแปลง Parkได้ถูกนำมาใช้กันอย่างแพร่หลายในการวิเคราะห์และศึกษา เครื่องจักร แบบซิงโครนัสและแบบเหนี่ยวนำมานานแล้ว การแปลงนี้เป็นแนวคิดที่สำคัญที่สุดเพียงอย่างเดียวที่จำเป็นสำหรับการทำความเข้าใจวิธีการทำงานของ FOC โดยแนวคิดนี้ได้รับการคิดค้นขึ้นครั้งแรกในบทความปี 1929 ที่เขียนโดยRobert H. Park [ 14 ] บทความของ Park ได้รับการจัดอันดับให้เป็นบทความที่มีความสำคัญเป็นอันดับสองในแง่ของผลกระทบจากบทความที่เกี่ยวข้องกับวิศวกรรมพลังงานทั้งหมดที่เคยตีพิมพ์ในศตวรรษที่ 20 ความแปลกใหม่ของงานของ Park เกี่ยวข้องกับความสามารถของเขาในการแปลง ชุด สมการเชิงอนุพันธ์ เชิงเส้นของเครื่องจักรที่เกี่ยวข้องใดๆ จากชุดที่มีสัมประสิทธิ์แปรผันตามเวลาไปเป็นชุด ที่มี สัมประสิทธิ์คงที่ ตามเวลา [ 15 ]ส่งผลให้เกิดระบบเชิงเส้นคงที่ตามเวลาหรือระบบ LTI
ภาพรวมทางเทคนิค
ภาพรวมของแพลตฟอร์มควบคุมไดรฟ์ความถี่แปรผันที่สำคัญซึ่งเป็นคู่แข่งกัน:
| VFD (Variable Frequency Drive) แบบมีเซ็นเซอร์หรือไม่มีเซ็นเซอร์ |
| ||||||||||||||||||||||||||||||||||||
แม้ว่าการวิเคราะห์การควบคุมไดรฟ์ AC อาจมีความซับซ้อนทางเทคนิคมาก ("ดูส่วนเพิ่มเติม") แต่การวิเคราะห์ดังกล่าวมักจะเริ่มต้นด้วยการสร้างแบบจำลองวงจรไดรฟ์มอเตอร์ที่เกี่ยวข้องตามแนวทางของกราฟการไหลของสัญญาณและสมการที่ แนบมาด้วย [ 16 ]
- สมการแบบจำลองมอเตอร์เหนี่ยวนำ
- ที่ไหน



สัญลักษณ์พารามิเตอร์พื้นฐาน ฉัน ปัจจุบัน เค ค่าสัมประสิทธิ์การเชื่อมต่อของขดลวดแต่ละขด ล ความเหนี่ยวนำ ร ความต้านทาน ที เวลา ที แรงบิด คุณ แรงดันไฟฟ้า การเชื่อมโยงฟลักซ์ เวลาปกติ ค่าคงที่เวลา (TC) ที่มีตัวห้อย ความเร็วเชิงมุม ค่าความเหนี่ยวนำรั่วไหลรวม




ตัวห้อยและตัวยก อี อิเล็กโตเมคานิกส์ ฉัน แรงดันไฟฟ้าเหนี่ยวนำ เค อ้างอิงถึงพิกัด k แอล โหลด ม ความเหนี่ยวนำร่วม ม เชิงกล (TC, ความเร็วเชิงมุม) ร โรเตอร์ อาร์ มูลค่าที่ได้รับการจัดอันดับ ส สเตเตอร์ หมายถึงค่าคงที่เวลาชั่วคราว





ในการควบคุมเวกเตอร์ มอเตอร์เหนี่ยวนำ AC หรือมอเตอร์ซิงโครนัสจะถูกควบคุมภายใต้สภาวะการทำงานทั้งหมดเหมือนกับมอเตอร์ DC ที่กระตุ้น แยกกัน [ 21 ]กล่าวคือ มอเตอร์ AC ทำงานเหมือนมอเตอร์ DC ซึ่งการเชื่อมโยงฟลักซ์สนามและ การเชื่อมโยงฟลักซ์ อาร์มาเจอร์ที่สร้างขึ้นโดยกระแสสนามและอาร์มาเจอร์ (หรือส่วนประกอบแรงบิด) ตามลำดับจะอยู่ ในแนวตั้ง ฉากกันดังนั้นเมื่อมีการควบคุมแรงบิด การเชื่อมโยงฟลักซ์สนามจะไม่ได้รับผลกระทบ จึงทำให้สามารถตอบสนองแรงบิดแบบไดนามิกได้
การควบคุมเวกเตอร์จึงสร้างเอาต์พุตแรงดันไฟฟ้ามอเตอร์ PWMสามเฟสที่ได้มาจากเวกเตอร์แรงดันไฟฟ้าที่ซับซ้อน เพื่อควบคุมเวกเตอร์กระแสไฟฟ้าที่ซับซ้อนซึ่งได้มาจากอินพุตกระแสไฟฟ้าสเตเตอร์สามเฟสของมอเตอร์ผ่าน การฉายภาพหรือการหมุน ไปมาระหว่างระบบความเร็วสามเฟสและขึ้นอยู่กับเวลา และระบบพิกัดสอง เฟสที่ไม่เปลี่ยนแปลงตามเวลาในกรอบอ้างอิงการหมุนของเวกเตอร์เหล่านี้[ 22 ]
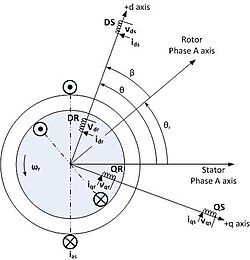
เวกเตอร์กระแสส เตเตอร์ที่ซับซ้อนดังกล่าวสามารถกำหนดได้ในระบบพิกัด (d,q) โดยมีส่วนประกอบตั้งฉากตามแกน d (โดยตรง) และ q (ควอดราเจอร์) โดยที่ส่วนประกอบของกระแสเชื่อมโยงฟลักซ์สนามจะเรียงตัวตามแกน d และส่วนประกอบของกระแสแรงบิดจะเรียงตัวตามแกน q [ 21 ]ระบบพิกัด (d,q) ของมอเตอร์เหนี่ยวนำสามารถซ้อนทับกับ ระบบ ไซน์ สามเฟสทันที (a,b,c) ของมอเตอร์ ได้ดังแสดงในภาพประกอบ (เฟส b และ c ไม่แสดงเพื่อความชัดเจน) ส่วนประกอบของเวกเตอร์กระแสระบบ (d,q) ช่วยให้สามารถควบคุมแบบดั้งเดิมได้ เช่นการควบคุมแบบสัดส่วนและอินทิกรัล หรือ PIเช่นเดียวกับมอเตอร์ DC
การฉายภาพที่เกี่ยวข้องกับระบบพิกัด (d,q) โดยทั่วไปจะเกี่ยวข้องกับ: [ 16 ] [ 22 ] [ 23 ]
- การฉายภาพไปข้างหน้าจากกระแสทันทีไปยัง (a,b,c) การแสดงเวกเตอร์พื้นที่กระแสสเตเตอร์เชิงซ้อนของระบบไซน์สามเฟส
- การฉาย ภาพไปข้างหน้าจากสามเฟสเป็นสองเฟส (a,b,c) ไปยัง ( , ) โดยใช้ การแปลง คลาร์กการใช้งานการควบคุมเวกเตอร์มักจะถือว่ามอเตอร์ไม่ได้ต่อลงดินและมีกระแสสามเฟสที่สมดุล ดังนั้นจึงต้องตรวจจับเพียงสองเฟสของกระแสของมอเตอร์เท่านั้น นอกจากนี้ การฉายภาพย้อนกลับจากสองเฟสเป็นสามเฟส ( , ) ไปยัง (a,b,c) ใช้ตัวปรับสัญญาณ PWM เวกเตอร์เชิงพื้นที่หรือการแปลงคลาร์กผกผันและตัวปรับสัญญาณ PWM อื่นๆ
- การฉายภาพ เฟสสองต่อสองไปข้างหน้าและย้อนกลับ ( , )-to-(d,q) และ (d,q)-to-( , ) โดยใช้การแปลง Park และการแปลง Park ผกผัน ตามลำดับ


แนวคิดของการใช้การแปลงปาร์คคือการแปลงระบบกระแสและแรงดันสามเฟสให้เป็นระบบเชิงเส้นคงที่ตามเวลาแบบสองพิกัด การทำให้ระบบเป็น LTI ช่วยให้สามารถใช้ตัวควบคุม PI ที่เรียบง่ายและง่ายต่อการใช้งานได้ อีกทั้งยังช่วยลดความซับซ้อนในการควบคุมกระแสที่สร้างฟลักซ์และแรงบิดด้วย
อย่างไรก็ตาม ไม่ใช่เรื่องแปลกที่แหล่งข้อมูลจะใช้การแปลงแบบผสมผสานจากสามเป็นสอง (a,b,c) เป็น (d,q) และการฉายภาพผกผัน
ในขณะที่การหมุนระบบพิกัด (d,q) สามารถตั้งค่าความเร็วได้ตามต้องการ แต่มีความเร็วหรือเฟรมอ้างอิงที่ต้องการสามแบบ: [ 17 ]
- กรอบอ้างอิงคงที่ซึ่งระบบพิกัด (d,q) ไม่หมุน
- กรอบอ้างอิงที่หมุนพร้อมกัน โดยที่ระบบพิกัด (d,q) หมุนด้วยความเร็วพร้อมกัน
- กรอบอ้างอิงโรเตอร์ที่ระบบพิกัด (d,q) หมุนด้วยความเร็วรอบโรเตอร์
ดังนั้น แรงบิดและกระแสสนาม ที่แยกออกจากกันจึงสามารถหาได้จากอินพุตกระแสสเตเตอร์ดิบสำหรับการพัฒนาอัลกอริธึมควบคุม[ 24 ]
ในขณะที่ส่วนประกอบสนามแม่เหล็กและแรงบิดในมอเตอร์ DC สามารถทำงานได้ค่อนข้างง่ายโดยการควบคุมกระแสสนามและกระแสอาร์มาเจอร์แยกกัน การควบคุมมอเตอร์ AC อย่างประหยัดในการใช้งานความเร็วแปรผันจำเป็นต้องมีการพัฒนาการควบคุมแบบใช้ไมโครโปรเซสเซอร์[ 24 ]โดยปัจจุบันไดรฟ์ AC ทั้งหมดใช้เทคโนโลยีการประมวลผลสัญญาณดิจิทัล (DSP) ที่ทรงพลัง [ 25 ]
อินเวอร์เตอร์สามารถนำไปใช้ได้ทั้งแบบ ไม่มีเซ็นเซอร์ แบบวงเปิดหรือแบบวงปิด FOC โดยข้อจำกัดที่สำคัญของการทำงานแบบวงเปิดคือความเร็วต่ำสุดที่เป็นไปได้ที่แรงบิด 100% ซึ่งก็คือประมาณ 0.8 Hz เมื่อเทียบกับการหยุดนิ่งสำหรับการทำงานแบบวงปิด[ 9 ]
มีวิธีการควบคุมเวกเตอร์สองวิธี คือ การควบคุมเวกเตอร์โดยตรงหรือแบบป้อนกลับ (DFOC) และการควบคุมเวกเตอร์ทางอ้อมหรือ แบบป้อน ไปข้างหน้า (IFOC) โดย IFOC เป็นที่นิยมใช้มากกว่า เนื่องจากในโหมดวงปิด ไดรฟ์ดังกล่าวสามารถทำงานได้ง่ายกว่าตลอดช่วงความเร็วตั้งแต่ความเร็วศูนย์ถึงความเร็วสูงที่ทำให้สนามอ่อนลง[ 26 ]ใน DFOC สัญญาณป้อนกลับขนาดฟลักซ์และมุมจะถูกคำนวณโดยตรงโดยใช้แบบจำลองแรงดันหรือกระแสที่เรียกว่า ใน IFOC สัญญาณป้อนไปข้างหน้าของมุมพื้นที่ฟลักซ์และขนาดฟลักซ์จะวัดกระแสสเตเตอร์และ ความเร็ว โรเตอร์ก่อน จากนั้นจึงหาค่ามุมพื้นที่ฟลักซ์ที่เหมาะสมโดยการรวมมุมโรเตอร์ที่สอดคล้องกับความเร็วโรเตอร์และค่าอ้างอิงที่คำนวณได้ของ มุม สลิปที่สอดคล้องกับความถี่สลิป[ 27 ] [ 28 ]
การควบคุมแบบไร้เซ็นเซอร์ (ดูแผนภาพบล็อก Sensorless FOC) ของไดรฟ์ AC เป็นสิ่งที่น่าสนใจเนื่องจากต้นทุนและความน่าเชื่อถือ การควบคุมแบบไร้เซ็นเซอร์ต้องอาศัยการหาค่าความเร็วรอบของโรเตอร์จากแรงดันและกระแสสเตเตอร์ที่วัดได้ ร่วมกับตัวประมาณค่าแบบวงเปิดหรือตัวสังเกตแบบวงปิด[ 16 ] [ 20 ]
แอปพลิเคชัน
- กระแสเฟสของสเตเตอร์จะถูกวัดและแปลงเป็นเวกเตอร์เชิงซ้อนในระบบพิกัด (a,b,c)
- กระแสไฟฟ้าจะถูกแปลงเป็น ระบบพิกัด( , ) เมื่อแปลงเป็นระบบพิกัดที่หมุนในกรอบอ้างอิงของโรเตอร์ แล้ว ตำแหน่งของโรเตอร์จะถูกหาได้จาก การอินทิเก รต ความเร็วโดยใช้เซ็นเซอร์วัดความเร็ว
- เวกเตอร์ การเชื่อมโยงฟลักซ์ของโรเตอร์ประมาณได้จากการคูณเวกเตอร์กระแสสเตเตอร์ด้วยค่าความเหนี่ยวนำแม่เหล็ก L mและกรองผลลัพธ์ด้วยค่าคงที่เวลาขณะ ไม่มีโหลดของโรเตอร์ L r /R rซึ่งก็คืออัตราส่วนของค่าความเหนี่ยวนำต่อค่าความต้านทานของโรเตอร์
- เวกเตอร์กระแสไฟฟ้าถูกแปลงเป็นระบบพิกัด (d,q)
- ส่วนประกอบแกน d ของเวกเตอร์กระแสสเตเตอร์ใช้ในการควบคุมการเชื่อมโยงฟลักซ์ของโรเตอร์ และส่วนประกอบแกน q ที่เป็นจินตนาการใช้ในการควบคุมแรงบิดของมอเตอร์ แม้ว่าตัวควบคุม PI จะสามารถใช้ควบคุมกระแสเหล่านี้ได้ แต่ การควบคุมกระแสแบบ Bang-bangให้ประสิทธิภาพเชิงไดนามิกที่ดีกว่า
- ตัวควบคุม PI ให้ส่วนประกอบแรงดันพิกัด (d,q) บางครั้งมีการเพิ่มเทอมการแยกส่วน (decoupling term) เข้าไปในเอาต์พุตของตัวควบคุมเพื่อปรับปรุงประสิทธิภาพการควบคุม ลดการเชื่อมโยงข้าม (cross coupling) หรือการเปลี่ยนแปลงความเร็ว กระแส และฟลักซ์แม่เหล็กอย่างรวดเร็วและมาก ตัวควบคุม PI บางครั้งยังต้องการการกรองความถี่ต่ำ (low-pass filtering ) ที่อินพุตหรือเอาต์พุตเพื่อป้องกันไม่ให้กระแสริปเปิลที่เกิดจากการสลับทรานซิสเตอร์ถูกขยายมากเกินไปและทำให้การควบคุมไม่เสถียร อย่างไรก็ตาม การกรองดังกล่าวก็จำกัดประสิทธิภาพของระบบควบคุมแบบไดนามิกด้วยเช่นกัน ความถี่ในการสลับสูง (โดยทั่วไปมากกว่า 10 kHz) มักจำเป็นเพื่อลดความต้องการการกรองสำหรับไดรฟ์ประสิทธิภาพสูง เช่น เซอร์โวไดรฟ์
- ส่วนประกอบของแรงดันไฟฟ้าจะถูกแปลงจากระบบพิกัด (d,q) ไปยังระบบพิกัด ( , )
- ส่วนประกอบแรงดันไฟฟ้าจะถูกแปลงจากระบบพิกัด ( , ) ไปยังระบบพิกัด (a,b,c) หรือป้อนเข้าสู่ ตัวปรับสัญญาณ แบบ Pulse-Width Modulation (PWM)หรือทั้งสองอย่าง เพื่อส่งสัญญาณไปยังส่วนอินเวอร์เตอร์กำลัง
ประเด็นสำคัญในการประยุกต์ใช้การควบคุมพาหะนำโรค:
- จำเป็นต้องมีการวัดความเร็วหรือตำแหน่ง หรือการประมาณค่าบางอย่าง
- แรงบิดและฟลักซ์สามารถเปลี่ยนแปลงได้อย่างรวดเร็วพอสมควร โดยใช้เวลาไม่เกิน 5-10 มิลลิวินาที ด้วยการเปลี่ยนค่าอ้างอิง
- การตอบสนองแบบขั้นบันไดจะมีค่าเกิน เล็กน้อย หากใช้การควบคุมแบบ PI
- โดยปกติแล้ว ความถี่ในการสลับการทำงานของทรานซิสเตอร์จะคงที่และถูกกำหนดโดยตัวปรับสัญญาณ
- ความแม่นยำของแรงบิดขึ้นอยู่กับความแม่นยำของพารามิเตอร์มอเตอร์ที่ใช้ในการควบคุม ดังนั้นจึงมักพบข้อผิดพลาดขนาดใหญ่เนื่องจากสาเหตุต่างๆ เช่น การเปลี่ยนแปลงอุณหภูมิของโรเตอร์
- จำเป็นต้องมีประสิทธิภาพการประมวลผลที่เหมาะสม โดยทั่วไปแล้วอัลกอริธึมควบคุมจะถูกคำนวณทุกรอบการทำงานของ PWM
แม้ว่าอัลกอริธึมควบคุมเวกเตอร์จะซับซ้อนกว่าการควบคุมแรงบิดโดยตรง (DTC) แต่ก็ไม่จำเป็นต้องคำนวณบ่อยเท่ากับอัลกอริธึม DTC นอกจากนี้เซ็นเซอร์วัดกระแสไฟฟ้าก็ไม่จำเป็นต้องเป็นรุ่นที่ดีที่สุดในตลาด ดังนั้นต้นทุนของโปรเซสเซอร์และฮาร์ดแวร์ควบคุมอื่นๆ จึงต่ำกว่า ทำให้เหมาะสำหรับแอปพลิเคชันที่ไม่ต้องการประสิทธิภาพสูงสุดของ DTC
ดูเพิ่มเติม
- การแปลงอัลฟาเบตา
- การควบคุมแบบปรับตัวได้
- วิศวกรรมควบคุม
- ทฤษฎีการควบคุม
- การแปลง Dqo
- ค่าลักษณะเฉพาะและเวกเตอร์ลักษณะเฉพาะ
- ตัวกรอง Kalman แบบขยาย
- ตัวกรอง (การประมวลผลสัญญาณ)
- การตอบสนองความถี่
- การแปลงฮิลเบิร์ต
- การตอบสนองต่อแรงกระตุ้น
- ระบบเชิงเส้นไม่เปลี่ยนแปลงตามเวลา
- ตัวกรองคาลมาน
- การควบคุมที่แข็งแกร่ง
- ตำแหน่งราก
- ทฤษฎีการรบกวน
- กราฟแสดงการไหลของสัญญาณ
- แบบจำลองสัญญาณขนาดเล็ก
- การควบคุมโหมดสไลด์
- ผู้สังเกตการณ์ของรัฐ
- การแสดงสถานะในปริภูมิสถานะ
- ส่วนประกอบสมมาตร
- การวิเคราะห์ระบบ
- การตอบสนองชั่วคราว
- ฟังก์ชันการถ่ายโอน
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ การควบคุมแบบมุ่งเน้นสนาม
การควบคุมแบบ Field-oriented control ( FOC ) หรือที่เรียกว่าvector controlเป็น วิธีการควบคุม ไดรฟ์ความถี่แปรผัน (VFD) ซึ่ง กระแส สเตเตอร์ของมอเตอร์ AC สามเฟส (เช่นBLDC )...
ประวัติการพัฒนา
K. Hasse จาก Technische Universität Darmstadt และ F. Blaschke จาก Siemens เป็นผู้บุกเบิก การควบคุม เวกเตอร์ ของมอเตอร์ AC ตั้งแต่ปี 1968 และช่วงต้นทศวรรษ 1970 โดย Hasse เสนอการควบคุมเวกเตอร์ทางอ้อม และ Blaschke เสนอการควบคุมเวกเตอร์โดยตรง [ 7 ] [ 8 ] Werner...
ภาพรวมทางเทคนิค
ภาพรวมของแพลตฟอร์มควบคุมไดรฟ์ความถี่แปรผันที่สำคัญซึ่งเป็นคู่แข่งกัน:
แอปพลิเคชัน
ประเด็นสำคัญในการประยุกต์ใช้การควบคุมพาหะนำโรค: