อ่าน 10 นาที
พื้นที่สัมผัส
ในทางคณิตศาสตร์ปริภูมิสัมผัสของแมนิโฟลด์เป็นการขยายความของเส้นสัมผัสไปยังเส้นโค้งในปริภูมิสองมิติและระนาบสัมผัสไปยังพื้นผิวในปริภูมิสามมิติในมิติที่สูงกว่า ในบริบทของฟิสิกส์...
พื้นที่สัมผัส
ในทางคณิตศาสตร์ปริภูมิสัมผัสของแมนิโฟลด์เป็นการขยายความของเส้นสัมผัสไปยังเส้นโค้งในปริภูมิสองมิติและระนาบสัมผัสไปยังพื้นผิวในปริภูมิสามมิติในมิติที่สูงกว่า ในบริบทของฟิสิกส์ ปริภูมิสัมผัสของแมนิโฟลด์ ณ จุดใดจุดหนึ่งสามารถมองได้ว่าเป็นปริภูมิของความเร็วที่เป็นไปได้สำหรับอนุภาคที่เคลื่อนที่บนแมนิโฟลด์
คำอธิบายแบบไม่เป็นทางการ



ในเรขาคณิตเชิงอนุพันธ์เราสามารถกำหนดปริภูมิ สัมผัสให้กับทุกจุด บนแมนิโฟลด์ที่หาอนุพันธ์ได้ ซึ่งเป็น ปริภูมิเวกเตอร์จริงที่ประกอบด้วยทิศทางที่เป็นไปได้ที่เวกเตอร์สามารถผ่านจุดนั้นได้โดยการ สัมผัส องค์ประกอบของปริภูมิสัมผัสที่จุดนั้นเรียกว่าเวกเตอร์สัมผัสที่ จุด นั้น นี่เป็นการขยายแนวคิดของเวกเตอร์ที่จุดเริ่มต้นที่กำหนดในปริภูมิยุคลิดมิติของปริภูมิสัมผัสที่ทุกจุดบน แมนิโฟลด์ ที่เชื่อมต่อกัน จะมี ขนาดเท่ากับมิติของแมนิโฟลด์นั้นเอง

ตัวอย่างเช่น หากแมนิโฟลด์ที่กำหนดเป็นทรงกลม a แล้วเราสามารถจินตนาการถึงปริภูมิสัมผัสที่จุดหนึ่งได้ว่าเป็นระนาบที่สัมผัสทรงกลมที่จุดนั้นและตั้งฉากกับรัศมีของทรงกลมที่ผ่านจุดนั้น โดยทั่วไปแล้ว หากแมนิโฟลด์ที่กำหนดถูกมองว่าเป็นซับแมนิโฟลด์ที่ฝังตัวอยู่ในปริภูมิยุคลิดแล้ว เราสามารถจินตนาการถึงปริภูมิสัมผัสในลักษณะที่เป็นรูปธรรมนี้ได้ นี่เป็นแนวทางดั้งเดิมในการกำหนดการขนส่งแบบขนานผู้เขียนหลายคนในเรขาคณิตเชิงอนุพันธ์และทฤษฎีสัมพัทธภาพทั่วไปใช้มัน[ 1 ] [ 2 ]อย่างเคร่งครัดมากขึ้น นี่เป็นการกำหนดปริภูมิสัมผัสเชิงเส้นตรง ซึ่งแตกต่างจากปริภูมิของเวกเตอร์สัมผัสที่อธิบายโดยศัพท์สมัยใหม่

ในเรขาคณิตเชิงพีชคณิตนั้น มีนิยามภายในของปริภูมิสัมผัส ณ จุดหนึ่งในวาไรตี้เชิงพีชคณิต ซึ่งให้ปริภูมิเวกเตอร์ที่มีมิติอย่างน้อยเท่ากับมิติของตัวมันเอง จุดที่มิติของปริภูมิสัมผัสเท่ากับมิติของวาไรตี้เชิงพีชคณิตพอดีเรียกว่า จุด เอกฐานส่วนจุดอื่นๆ เรียกว่า จุด เอกฐานตัวอย่างเช่น เส้นโค้งที่ตัดกับตัวเองจะไม่มีเส้นสัมผัสเพียงเส้นเดียว ณ จุดนั้น จุดเอกฐานของวาไรตี้เชิงพีชคณิตคือ จุดที่ "การทดสอบว่าเป็นแมนิโฟลด์" ไม่ผ่าน ดูปริภูมิสัมผัสของซาริสกี


เมื่อมีการนำปริภูมิสัมผัสของแมนิโฟลด์เข้ามาเกี่ยวข้องแล้ว เราสามารถกำหนดสนามเวกเตอร์ซึ่งเป็นนามธรรมของสนามความเร็วของอนุภาคที่เคลื่อนที่ในอวกาศ สนามเวกเตอร์จะเชื่อมโยงเวกเตอร์จากปริภูมิสัมผัส ณ จุดนั้นกับทุกจุดบนแมนิโฟลด์อย่างราบรื่น สนามเวกเตอร์ดังกล่าวใช้ในการกำหนดสมการเชิงอนุพันธ์สามัญทั่วไปบนแมนิโฟลด์: คำตอบของสมการเชิงอนุพันธ์ดังกล่าวคือเส้นโค้ง ที่หาอนุพันธ์ได้ บนแมนิโฟลด์ ซึ่งอนุพันธ์ของเส้นโค้งนั้น ณ จุดใดๆ จะเท่ากับเวกเตอร์สัมผัสที่เชื่อมโยงกับจุดนั้นโดยสนามเวกเตอร์
พื้นที่สัมผัสทั้งหมดของแมนิโฟลด์สามารถ "เชื่อมต่อเข้าด้วยกัน" เพื่อสร้างแมนิโฟลด์เชิงอนุพันธ์ใหม่ที่มีมิติเป็นสองเท่าของแมนิโฟลด์เดิม ซึ่งเรียกว่ามัดสัมผัสของแมนิโฟลด์
คำจำกัดความอย่างเป็นทางการ
คำอธิบายที่ไม่เป็นทางการข้างต้นอาศัยความสามารถของแมนิโฟลด์ในการฝังตัวลงในปริภูมิเวกเตอร์แวดล้อมเพื่อให้เวกเตอร์สัมผัสสามารถ "ยื่นออกมา" จากแมนิโฟลด์ไปยังปริภูมิแวดล้อมได้ อย่างไรก็ตาม การกำหนดแนวคิดของปริภูมิสัมผัสโดยอาศัยแมนิโฟลด์เพียงอย่างเดียวจะสะดวกกว่า[ 3 ]

มีวิธีการเทียบเท่ากันหลายวิธีในการกำหนดพื้นที่สัมผัสของแมนิโฟลด์ แม้ว่าการกำหนดโดยใช้ความเร็วของเส้นโค้งจะดูง่ายที่สุด แต่ก็เป็นวิธีที่ยุ่งยากที่สุดเช่นกัน วิธีการที่สง่างามและเป็นนามธรรมกว่าจะอธิบายไว้ด้านล่าง
นิยามผ่านเส้นโค้งสัมผัส
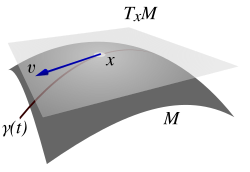
ในภาพจำลองของแมนิโฟลด์ฝังตัว เวกเตอร์สัมผัส ณ จุดหนึ่งถือได้ว่าเป็นความเร็วของเส้นโค้งที่ผ่านจุดนั้นดังนั้นเราจึงสามารถนิยามเวกเตอร์สัมผัสได้ว่าเป็นชั้นสมมูลของเส้นโค้งที่ผ่านจุดนั้นและสัมผัสกัน ณ จุดนั้น
สมมติว่าเป็นแมนิโฟลด์ที่หาอนุพันธ์ได้ (โดยมีความเรียบ ) และเลือกแผนภูมิพิกัดโดยที่เป็นเซตย่อยเปิดของที่บรรจุสมมติเพิ่มเติมว่า มีเส้นโค้งสองเส้นที่มีซึ่งทั้งสองเส้นสามารถหาอนุพันธ์ได้ในความหมายปกติ (เราเรียกเส้นโค้งที่หาอนุพันธ์ได้เหล่านี้ว่าเริ่มต้นที่ ) แล้วและจะเรียกว่าสมมูลกันที่ ก็ต่อเมื่ออนุพันธ์ของและที่ตรงกัน นี่เป็นการกำหนดความสัมพันธ์สมมูลบนเซตของเส้นโค้งที่หาอนุพันธ์ได้ทั้งหมดที่เริ่มต้นที่และชั้นสมมูลของเส้นโค้งดังกล่าวเรียกว่าเวกเตอร์ สัมผัส ของที่ชั้นสมมูลของเส้นโค้งดังกล่าวใดๆจะถูกแทนด้วยปริภูมิสัมผัสของที่ซึ่งแทนด้วยถูกกำหนดให้เป็นเซตของเวกเตอร์สัมผัสทั้งหมดที่ ที่โดยไม่ขึ้นอยู่กับการเลือกแผนภูมิพิกัด


















ในการกำหนดการดำเนินการในปริภูมิเวกเตอร์บนเราใช้แผนภูมิและกำหนดแผนที่โดยที่แผนที่นี้เป็นฟังก์ชันหนึ่งต่อ หนึ่งทั่วถึง และสามารถใช้ถ่ายโอนการดำเนินการในปริภูมิเวกเตอร์บนไปยัง ได้จึงทำให้เซตหลังกลายเป็นปริภูมิเวกเตอร์จริงมิติ อีกครั้งหนึ่ง จำเป็นต้องตรวจสอบว่าการสร้างนี้ไม่ขึ้นอยู่กับแผนภูมิและเส้นโค้งที่ใช้ และในความเป็นจริงแล้วมันไม่ขึ้น อยู่กับแผนภูมิและเส้นโค้งใดๆ






นิยามผ่านการอนุมาน
สมมติว่าตอนนี้เป็นแมนิโฟลด์ ฟังก์ชันค่าจริงจะอยู่ใน ก็ต่อเมื่อ สำหรับแผนภูมิพิกัดทุกแผนภูมิฟังก์ชันนั้นสามารถหาอนุพันธ์ได้อนันต์ครั้ง สังเกตว่า เป็น พีชคณิตแบบสมาคมจริงที่เกี่ยวข้องกับผลคูณและผลรวมของฟังก์ชันแบบจุดต่อจุดและการคูณด้วยสเกลาร์



![{\displaystyle f\circ \varphi ^{-1}:\varphi [U]\subseteq \mathbb {R} ^{n}\to \mathbb {R} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/8aeb6f9eb7559fb915f3645b06bf2d1da494d814)
การอนุพันธ์ที่จุด a ถูกนิยามว่าเป็นแผนที่เชิงเส้นที่สอดคล้องกับเอกลักษณ์ของไลบ์นิซ ซึ่งจำลองมาจากกฎผลคูณของแคลคูลัส


(สำหรับฟังก์ชันคงที่ทุกฟังก์ชันจะได้ว่า)


กำหนดให้เซตของการอนุพันธ์ทั้งหมด ณการตั้งค่า

- และ


กลายเป็นปริภูมิเวกเตอร์
การสรุปโดยทั่วไป
การขยายความหมายของคำจำกัดความนี้สามารถทำได้ เช่น ไปยังแมนิโฟลด์เชิงซ้อนและวาไรตีเชิงพีชคณิตอย่างไรก็ตาม แทนที่จะตรวจสอบอนุพันธ์จากพีชคณิตของฟังก์ชันทั้งหมด เราต้องทำงานในระดับของเจิร์มของฟังก์ชันแทน เหตุผลก็คือชีฟโครงสร้างอาจไม่เหมาะสม กับโครงสร้าง ดัง กล่าว ตัวอย่างเช่น ให้เป็นวาไรตีเชิงพีชคณิตที่มีชีฟโครงสร้างแล้วปริภูมิสัมผัสซาริสกีที่จุดคือชุดของการอนุพันธ์ ทั้งหมด โดยที่คือฟิลด์พื้นฐานและคือสตอล์กของที่







ความเท่าเทียมกันของคำจำกัดความ
สำหรับและเส้นโค้งที่หาอนุพันธ์ได้โดยที่กำหนด(โดยที่อนุพันธ์นั้นหาในความหมายปกติ เพราะเป็นฟังก์ชันจากไป) เราสามารถตรวจสอบได้ว่าเป็นอนุพันธ์ที่จุดและเส้นโค้งที่เทียบเท่ากันจะให้ผลลัพธ์เป็นอนุพันธ์เดียวกัน ดังนั้น สำหรับชั้นสมมูลเราสามารถกำหนดโดยที่เส้นโค้งถูกเลือกโดยพลการ แผนที่เป็นไอโซมอร์ฟิซึมของปริภูมิเวกเตอร์ระหว่างปริภูมิของชั้นสมมูลและปริภูมิของอนุพันธ์ที่จุด











นิยามผ่านปริภูมิโคแทนเจนต์
อีกครั้ง เราเริ่มต้นด้วยแมนิโฟลด์และจุดพิจารณาไอเดียลของที่ประกอบด้วยฟังก์ชันเรียบทั้งหมดที่หายไปที่ นั่น คือแล้วและต่างก็เป็นปริภูมิเวกเตอร์จริง และสามารถแสดงได้ว่าปริภูมิผลหารนั้น สม isomorphicกับปริภูมิโคแทนเจนต์โดยใช้ทฤษฎีบทของเทย์เลอร์ปริภูมิแทนเจนต์จึงสามารถนิยามได้ว่าเป็นปริภูมิคู่ของ







แม้ว่าคำจำกัดความนี้จะเป็นนามธรรมที่สุด แต่ก็เป็นคำจำกัดความที่สามารถนำไปปรับใช้ในบริบทอื่นๆ ได้ง่ายที่สุด เช่น ในความหลากหลายที่พิจารณาในเรขาคณิตเชิงพีชคณิต
ถ้าเป็นการอนุพันธ์ที่จุดแล้วสำหรับทุก ๆซึ่งหมายความว่าก่อให้เกิดแผนที่เชิงเส้น ในทางกลับกัน ถ้าเป็นแผนที่เชิงเส้น แล้วจะกำหนดอนุพันธ์ที่จุด ซึ่งทำให้เกิดความเท่าเทียมกันระหว่างปริภูมิสัมผัสที่กำหนดผ่านอนุพันธ์และปริภูมิสัมผัสที่กำหนดผ่านปริภูมิโคแทนเจนต์




คุณสมบัติ
ถ้าเป็นเซตย่อยเปิดของแล้วจะเป็นแมนิโฟลด์โดยธรรมชาติ (โดยถือว่าแผนภูมิพิกัดเป็นแผนที่เอกลักษณ์บนเซตย่อยเปิดของ) และปริภูมิสัมผัสทั้งหมดจะถูกระบุโดยธรรมชาติด้วย
เวกเตอร์สัมผัสในฐานะอนุพันธ์เชิงทิศทาง
อีกวิธีหนึ่งในการคิดเกี่ยวกับเวกเตอร์สัมผัสคือการมองว่าเป็นอนุพันธ์เชิงทิศทางเมื่อกำหนดเวกเตอร์ในเราจะกำหนดอนุพันธ์เชิงทิศทางที่จุดโดย


![{\displaystyle \forall f\in {C^{\infty }}(\mathbb {R} ^{n}):\qquad (D_{v}f)(x):=\left.{\frac {\mathrm {d} }{\mathrm {d} {t}}}[f(x+tv)]\right|_{t=0}=\sum _{i=1}^{n}v^{i}{\frac {\partial f}{\partial x^{i}}}(x).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69094ef746485e599f1b39a5fbb70dd6730caa70)
แผนที่นี้เป็นอนุพันธ์โดยธรรมชาติที่จุด นอกจากนี้ อนุพันธ์ทุกตัวที่จุดในก็มีรูปแบบนี้เช่นกัน ดังนั้นจึงมีความสัมพันธ์แบบหนึ่งต่อหนึ่งระหว่างเวกเตอร์ (ซึ่งคิดว่าเป็นเวกเตอร์สัมผัสที่จุด ) และอนุพันธ์ที่จุด
เนื่องจากเวกเตอร์สัมผัสของแมนิโฟลด์ทั่วไป ณ จุดหนึ่ง สามารถนิยามได้ว่าเป็นอนุพันธ์ ณ จุดนั้น จึงเป็นเรื่องปกติที่จะคิดว่าเวกเตอร์เหล่านั้นเป็นอนุพันธ์เชิงทิศทาง โดยเฉพาะอย่างยิ่ง ถ้าเป็นเวกเตอร์สัมผัสของณ จุดหนึ่ง(ซึ่งคิดว่าเป็นอนุพันธ์) แล้วให้นิยามอนุพันธ์เชิงทิศทางในทิศทางโดย


ถ้าเราคิดว่าเป็นความเร็วเริ่มต้นของเส้นโค้งที่หาอนุพันธ์ได้ซึ่งเริ่มต้นที่ นั่น คือแล้วให้กำหนดโดย แทน


ฐานของปริภูมิสัมผัส ณ จุดหนึ่ง
สำหรับแมนิโฟลด์ ถ้า กำหนดแผนภูมิ ด้วย แล้วเราสามารถกำหนดฐานเรียงลำดับของโดย





ดังนั้นสำหรับเวกเตอร์สัมผัสทุกตัวจะมี


ดังนั้นสูตรนี้จึงแสดงออกมาเป็นผลรวมเชิงเส้นของเวกเตอร์สัมผัสฐานที่กำหนดโดยแผนภูมิพิกัด[ 4 ]

อนุพันธ์ของแผนที่
ทุกแผนที่เรียบ (หรือหาอนุพันธ์ได้) ระหว่างแมนิโฟลด์เรียบ (หรือหาอนุพันธ์ได้) จะเหนี่ยวนำให้เกิดแผนที่เชิงเส้น ตามธรรมชาติ ระหว่างปริภูมิสัมผัสที่สอดคล้องกัน:


ถ้าปริภูมิสัมผัสถูกกำหนดโดยเส้นโค้งที่หาอนุพันธ์ได้ แผนที่นี้จะถูกกำหนดโดย

หากปริภูมิสัมผัสถูกกำหนดผ่านการอนุพันธ์แทน แผนที่นี้จะถูกกำหนดโดย
:=D(f\circ \varphi )}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fbde4a6ca4ae02c2b63585e4f743d4de1eb0c8ad)
แผนที่เชิงเส้นนี้เรียกได้หลายชื่อ เช่นอนุพันธ์อนุพันธ์รวม ดิฟเฟอเรนเชียลหรือพุชฟอร์เวิร์ดของที่และมักแสดงด้วยสัญลักษณ์อื่นๆ อีกหลายแบบ:


ในแง่หนึ่ง อนุพันธ์คือการประมาณเชิงเส้นที่ดีที่สุดสำหรับค่าใกล้เคียงโปรดสังเกตว่าเมื่อแล้วแผนที่จะสอดคล้องกับแนวคิดปกติของอนุพันธ์ของฟังก์ชันในพิกัดท้องถิ่นอนุพันธ์ของจะกำหนดโดยเมท ริก ซ์จาโคเบียน


ผลลัพธ์ที่สำคัญเกี่ยวกับการแมปอนุพันธ์มีดังต่อไปนี้:
ทฤษฎีบท—ถ้าเป็นดิฟเฟโอเมอร์ฟิซึมเฉพาะที่ ณจุดใน แล้วเป็นไอโซเมอร์ฟิซึม เชิงเส้น ในทางกลับกัน ถ้าเป็นฟังก์ชันที่หาอนุพันธ์ได้อย่างต่อเนื่อง และเป็นไอโซเมอร์ฟิซึม แล้วจะมีย่านเปิดของเช่นนั้น ที่แมปแบบดิฟเฟโอเมอร์ฟิกไปยังภาพของมัน

นี่เป็นการขยายทฤษฎีบทฟังก์ชันผกผันไปสู่แผนที่ระหว่างแมนิโฟลด์
ดูเพิ่มเติม
- ฐานที่เหนี่ยวนำโดยพิกัด
- พื้นที่โคแทนเจนต์
- เรขาคณิตเชิงอนุพันธ์ของเส้นโค้ง
- แผนที่เลขชี้กำลัง
- ปริภูมิเวกเตอร์
หมายเหตุ
- ^ do Carmo, Manfredo P. (1976). เรขาคณิตเชิงอนุพันธ์ของเส้นโค้งและพื้นผิว . Prentice-Hall.:
- ^ Dirac, Paul AM (1996) [1975]. ทฤษฎีสัมพัทธภาพทั่วไปสำนักพิมพ์มหาวิทยาลัยพรินซ์ตันISBN 0-691-01146-X.
- ^ Chris J. Isham (1 มกราคม 2002). เรขาคณิตเชิงอนุพันธ์สมัยใหม่สำหรับนักฟิสิกส์ . สำนักพิมพ์ Allied Publishers. หน้า 70–72 . ISBN 978-81-7764-316-9.
- ^ Lerman, Eugene. "An Introduction to Differential Geometry" (PDF) . หน้า 12. เก็บถาวรจากต้นฉบับ(PDF)เมื่อ 2023-06-08 . เรียกดูเมื่อ2021-04-09 .
ลิงก์ภายนอก
- ระนาบสัมผัสที่ MathWorld
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ พื้นที่สัมผัส
ในทางคณิตศาสตร์ปริภูมิสัมผัสของแมนิโฟลด์เป็นการขยายความของเส้นสัมผัสไปยังเส้นโค้งในปริภูมิสองมิติและระนาบสัมผัสไปยังพื้นผิวในปริภูมิสามมิติในมิติที่สูงกว่า ในบริบทของฟิสิกส์...
คำอธิบายแบบไม่เป็นทางการ
ใน เรขาคณิตเชิงอนุพันธ์ เราสามารถกำหนด ปริภูมิ สัมผัสให้กับทุกจุด บนแม นิโฟลด์ที่หาอนุพันธ์ได้ ซึ่งเป็น ปริภูมิเวกเตอร์ จริงที่ประกอบด้วยทิศทางที่เป็นไปได้ที่เวกเตอร์สามารถผ่านจุดนั้นได้โดยการ สัมผัส องค์ประกอบของปริภูมิสัมผัสที่จุดนั้นเรียกว่า เวกเตอร์สัมผัส...
คำจำกัดความอย่างเป็นทางการ
คำอธิบายที่ไม่เป็นทางการข้างต้นอาศัยความสามารถของแมนิโฟลด์ในการฝังตัวลงในปริภูมิเวกเตอร์แวดล้อมเพื่อให้เวกเตอร์สัมผัสสามารถ "ยื่นออกมา" จากแมนิโฟลด์ไปยังปริภูมิแวดล้อมได้ อย่างไรก็ตาม การกำหนดแนวคิดของปริภูมิสัมผัสโดยอาศัยแมนิโฟลด์เพียงอย่างเดียวจะสะดวกกว่า [...
นิยามผ่านเส้นโค้งสัมผัส
ในภาพจำลองของแมนิโฟลด์ฝังตัว เวกเตอร์สัมผัส ณ จุดหนึ่งถือได้ว่าเป็น ความเร็ว ของ เส้นโค้ง ที่ผ่านจุดนั้นดังนั้นเราจึงสามารถนิยามเวกเตอร์สัมผัสได้ว่าเป็นชั้นสมมูลของเส้นโค้งที่ผ่านจุดนั้นและสัมผัสกัน ณ จุดนั้น x {\displaystyle x} x {\displaystyle x} x...