อ่าน 12 นาที
เทนเซกริตี
Tensegrity , tensional integrityหรือfloating compressionเป็น หลักการ โครงสร้างที่อิงตามระบบของส่วนประกอบที่แยกออกจากกันภายใต้แรงอัดภายในเครือข่ายของแรงดึง ต่อเนื่อง...
เทนเซกริตี
| ภาพสามมิติ | |||
|---|---|---|---|
| |||
| |||
| |||
| |||
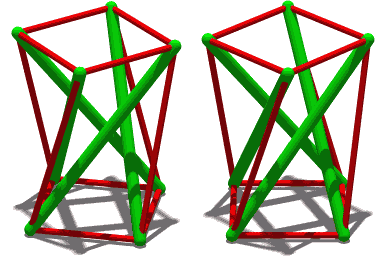
| ภาพเคลื่อนไหวโครงสร้างคล้ายกัน แต่มีชิ้นส่วนรับแรงอัดสี่ชิ้น | |||
Tensegrity , tensional integrityหรือfloating compressionเป็น หลักการ โครงสร้างที่อิงตามระบบของส่วนประกอบที่แยกออกจากกันภายใต้แรงอัดภายในเครือข่ายของแรงดึง ต่อเนื่อง และจัดเรียงในลักษณะที่ชิ้นส่วนที่ถูกอัด (โดยปกติจะเป็นแท่งหรือคาน) ไม่สัมผัสกัน ในขณะที่ ชิ้นส่วนที่ถูกดึงด้วยแรงอัด ล่วงหน้า (โดยปกติจะเป็นสายเคเบิลหรือเอ็น) จะจำกัดระบบในเชิงพื้นที่[ 1 ]
โครงสร้างแบบเทนเซกริตีพบได้ทั้งในธรรมชาติและสิ่งประดิษฐ์ของมนุษย์: ในร่างกายมนุษย์ กระดูกถูกยึดไว้ด้วยแรงอัด ในขณะที่เนื้อเยื่อเกี่ยวพันถูกยึดไว้ด้วยแรงดึง และหลักการเดียวกันนี้ได้ถูกนำไปประยุกต์ใช้กับการออกแบบเฟอร์นิเจอร์ สถาปัตยกรรม และอื่นๆ อีกมากมาย
คำนี้ถูกบัญญัติโดยBuckminster Fullerในช่วงทศวรรษ 1960 โดยเป็นการผสมคำของ "tensional integrity" [ 2 ]
แอปพลิเคชัน
สถาปัตยกรรม
ประติมากรรม

องค์ประกอบพื้นฐานเชิงแนวคิดของโครงสร้างเทนเซกริตีสามารถเห็นได้ในสกายลอน (Skylon ) ปี 1951 สายเคเบิลหกเส้น โดยสามเส้นอยู่ที่ปลายแต่ละด้าน ยึดหอคอยไว้ในตำแหน่ง สายเคเบิลสามเส้นที่เชื่อมต่อกับด้านล่าง "กำหนด" ตำแหน่งของหอคอย ส่วนสายเคเบิลอีกสามเส้นที่เหลือทำหน้าที่เพียงแค่ช่วยให้หอคอยตั้งตรง
โครงสร้างเทนเซกริตีแบบสามแท่ง (แสดงในภาพวาดหมุนของ T3-Prism ด้านบน) สร้างขึ้นจากโครงสร้างที่เรียบง่ายกว่านี้ โดยปลายของแท่งสีเขียวแต่ละแท่งดูเหมือนด้านบนและด้านล่างของสกายลอน ตราบใดที่มุมระหว่างสายเคเบิลสองเส้นใดๆ น้อยกว่า 180° ตำแหน่งของแท่งก็จะถูกกำหนดไว้อย่างชัดเจน แม้ว่าสายเคเบิลสามเส้นจะเป็นจำนวนขั้นต่ำที่จำเป็นสำหรับความเสถียร แต่ก็สามารถติดสายเคเบิลเพิ่มเติมเข้ากับแต่ละจุดเชื่อมต่อเพื่อความสวยงามและเพื่อความปลอดภัยสำรองได้ตัวอย่างเช่นหอคอยเข็มของเคนเนธ สเนลสันใช้รูปแบบที่ซ้ำกันซึ่งสร้างขึ้นโดยใช้จุดเชื่อมต่อที่เชื่อมต่อกับสายเคเบิลห้าเส้นในแต่ละจุด
นักประวัติศาสตร์ศิลปะEleanor Heartney ชี้ให้เห็นว่าความโปร่งใสทาง สายตาเป็นคุณสมบัติทางสุนทรียศาสตร์ที่สำคัญของโครงสร้างเหล่านี้[ 3 ] Korkmaz และคณะได้โต้แย้งว่าโครงสร้างเทนเซกริตีที่มีน้ำหนักเบาเหมาะสำหรับสถาปัตยกรรมที่ปรับเปลี่ยนได้ [ 4 ] [ 5 ]
อาคารและสะพาน
โครงสร้างแบบเทนเซกริตีเริ่มมีการประยุกต์ใช้ในงานสถาปัตยกรรมมากขึ้นตั้งแต่ทศวรรษ 1960 เมื่อมาเชียจ กินโตว์ทและมาเชียจ คราซินสกีออกแบบสนามกีฬาSpodek (ใน เมืองคาโตวิซประเทศโปแลนด์ ) ซึ่งเป็นหนึ่งในโครงสร้างขนาดใหญ่แห่งแรกๆ ที่ใช้หลักการของเทนเซกริตี หลังคาใช้พื้นผิวเอียงที่ยึดไว้ด้วยระบบเคเบิลที่ค้ำยันรอบวง หลักการของเทนเซกริตีถูกนำไปใช้ในสนามกีฬายิมนาสติกโอลิมปิกโซลของเดวิด ไกเกอร์ (สำหรับการแข่งขันกีฬาโอลิมปิกฤดูร้อนปี 1988 ) และGeorgia Dome (สำหรับการแข่งขันกีฬาโอลิมปิกฤดูร้อนปี 1996 ) ด้วยเช่นกัน สนาม Tropicana Fieldซึ่งเป็นสนามเหย้าของทีมเบสบอล Tampa Bay Rays ก็มีหลังคาโดมที่รองรับด้วยโครงสร้างเทนเซกริตีขนาดใหญ่

เมื่อวันที่ 4 ตุลาคม 2552 สะพานคุริลปาได้เปิดใช้งานข้ามแม่น้ำบริสเบนในรัฐควีนส์แลนด์ ประเทศออสเตรเลียสะพานแห่งนี้มีโครงสร้างแบบเสาหลายต้นและใช้เคเบิลยึดตามหลักการของเทนเซกริตี ปัจจุบันเป็นสะพานเทนเซกริตีที่ใหญ่ที่สุดในโลก
หุ่นยนต์

ตั้งแต่ช่วงต้นทศวรรษ 2000 เป็นต้นมา เทนเซกริตีได้รับความสนใจจากนักวิทยาศาสตร์หุ่นยนต์มากขึ้น เนื่องจากมีศักยภาพในการออกแบบหุ่นยนต์ที่มีน้ำหนักเบาและทนทาน งานวิจัยจำนวนมากได้ศึกษาหุ่นยนต์สำรวจเทนเซกริตี[ 6 ]หุ่นยนต์เลียนแบบชีวภาพ[ 7 ] [ 8 ] [ 9 ]และหุ่นยนต์อ่อนนุ่มแบบโมดูลาร์[ 10 ]หุ่นยนต์เทนเซกริตีที่มีชื่อเสียงที่สุดคือSuper Ball Bot [ 11 ]ซึ่งเป็นหุ่นยนต์สำรวจอวกาศที่ใช้โครงสร้างเทนเซกริตี 6 บาร์ปัจจุบันอยู่ระหว่างการพัฒนาที่NASA Ames
กายวิภาคศาสตร์
ไบโอเทนเซกริตี (Biotensegrity) ซึ่ง เป็นคำที่สตีเฟน เลวิน (Stephen Levin) บัญญัติขึ้น เป็นการประยุกต์ใช้หลักการเทนเซกริตีในเชิงทฤษฎีที่ขยายออกไปสำหรับโครงสร้างทางชีวภาพ [ 12 ] โครงสร้างทางชีวภาพ เช่น กล้ามเนื้อ กระดูก พังผืด เอ็น และเส้นเอ็นหรือเยื่อหุ้มเซลล์ที่แข็งและยืดหยุ่นจะมีความแข็งแรงได้จากการรวมกันของส่วนที่ตึงและส่วนที่อัดระบบกล้ามเนื้อและกระดูกประกอบด้วยเครือข่ายต่อเนื่องของกล้ามเนื้อและเนื้อเยื่อเกี่ยวพัน[ 13 ]โดยที่กระดูกให้การรองรับแรงอัดที่ไม่ต่อเนื่อง ในขณะที่ระบบประสาทรักษาความตึงเครียดในร่างกายผ่านการกระตุ้นด้วยไฟฟ้า เลวินอ้างว่ากระดูกสันหลังของมนุษย์ก็เป็นโครงสร้างเทนเซกริตีเช่นกัน[ 14 ]
ชีวเคมี
Donald E. Ingberได้พัฒนาทฤษฎีเทนเซกริตีเพื่ออธิบายปรากฏการณ์ต่างๆ มากมายที่สังเกตได้ในชีววิทยาระดับโมเลกุล [ 15 ] ตัวอย่าง เช่น รูปร่างที่แสดงออกของเซลล์ ไม่ว่าจะเป็นปฏิกิริยาต่อแรงกดที่ใช้ ปฏิสัมพันธ์กับพื้นผิว ฯลฯ ทั้งหมดสามารถจำลองทางคณิตศาสตร์ได้โดยการแสดง โครงร่างของเซลล์เป็นเทนเซกริตี นอกจากนี้ รูปแบบทางเรขาคณิตที่พบได้ทั่วไปในธรรมชาติ (เกลียวของDNAโดมทรงเรขาคณิตของวอลว็อก ซ์ บัค มิ นสเตอร์ ฟูลเลอรีนและอื่นๆ) ก็สามารถเข้าใจได้โดยการประยุกต์ใช้หลักการของเทนเซกริตีกับการประกอบตัวเองโดยธรรมชาติของสารประกอบ โปรตีน[ 16 ]และแม้กระทั่งอวัยวะ มุมมองนี้ได้รับการสนับสนุนจากวิธีที่ปฏิสัมพันธ์ระหว่างแรงดึงและแรงอัดของเทนเซกริตีช่วยลดปริมาณวัสดุที่จำเป็นในการรักษาเสถียรภาพและบรรลุความยืดหยุ่นของโครงสร้าง แม้ว่าการเปรียบเทียบกับวัสดุเฉื่อยภายในกรอบชีวภาพจะไม่มีข้อสมมติฐานที่ได้รับการยอมรับอย่างกว้างขวางในวิทยาศาสตร์ทางสรีรวิทยา[ 17 ]ดังนั้น แรงกดดัน จากการคัดเลือกตามธรรมชาติจึงมีแนวโน้มที่จะสนับสนุนระบบชีวภาพที่จัดระเบียบในลักษณะเทนเซกริตี
อิงเบอร์อธิบายว่า:
สมาชิกรับแรงดึงในโครงสร้างเหล่านี้ ไม่ว่าจะเป็นโดมของ Fuller หรือประติมากรรมของ Snelson ล้วนกำหนดเส้นทางที่สั้นที่สุดระหว่างสมาชิกที่อยู่ติดกัน (และด้วยเหตุนี้ จึงถูกจัดเรียงตามนิยาม) แรงดึงจะส่งผ่านตัวเองไปตามระยะทางที่สั้นที่สุดระหว่างสองจุด ดังนั้นสมาชิกของโครงสร้างเทนเซกริตีจึงถูกจัดวางอย่างแม่นยำเพื่อต้านทานแรงดึงได้ดีที่สุด ด้วยเหตุนี้ โครงสร้างเทนเซกริตีจึงมีความแข็งแรงสูงสุด[ 15 ]
ในวิทยาเอ็มบริโอRichard Gordonเสนอว่าคลื่นการแยกความแตกต่างของเอ็มบริโอแพร่กระจายโดย 'ออร์แกเนลล์ของการแยกความแตกต่าง' [ 18 ]ซึ่งโครงกระดูกเซลล์ประกอบขึ้นเป็นโครงสร้างเทนเซกริตีแบบสองสถานะที่ปลายยอดของเซลล์ที่เรียกว่า 'ตัวแยกสถานะเซลล์' [ 19 ]
ที่มาและประวัติศาสตร์ศิลปะ

ต้นกำเนิดของเทนเซกริตีไม่ได้เป็นที่ยอมรับกันโดยทั่วไป[ 21 ]โครงสร้างแบบดั้งเดิมหลายอย่าง เช่นเรือคายัคแบบหุ้มด้วยหนังและโชจิใช้องค์ประกอบแรงดึงและแรงอัดในลักษณะที่คล้ายคลึงกัน
ศิลปินชาวรัสเซียViatcheslav Koleichukอ้างว่าแนวคิดเรื่องเทนเซกริตีถูกคิดค้นขึ้นครั้งแรกโดยKārlis Johansonsศิลปินแนวหน้า ชาว โซเวียต เชื้อสาย ลัตเวีย ซึ่งได้นำผลงานบางส่วนไปจัดแสดงในนิทรรศการหลักของลัทธิคอนสต รัคติวิสต์ของรัสเซีย ในปี 1921 [ 22 ]คำกล่าวอ้างของ Koleichuk ได้รับการสนับสนุนจากMaria Goughสำหรับผลงานชิ้นหนึ่งในนิทรรศการคอนสตรัคติวิสต์ปี 1921 [ 23 ] Snelson ได้ยอมรับว่าลัทธิคอนสตรัคติวิสต์เป็นแรงบันดาลใจให้กับผลงานของเขา (คำถาม?) [ 24 ]วิศวกรชาวฝรั่งเศส David Georges Emmerich ยังได้กล่าวถึงว่าผลงานของ Johansons (และแนวคิดการออกแบบอุตสาหกรรม) ดูเหมือนจะคาดการณ์ถึงแนวคิดเทนเซกริตีไว้ล่วงหน้า[ 25 ]
ในความเป็นจริง เอกสารทางวิทยาศาสตร์บางฉบับพิสูจน์ข้อเท็จจริงนี้ โดยแสดงภาพโครงสร้างซิมเพล็กซ์แรก (สร้างด้วยแท่ง 3 แท่งและเอ็น 9 เส้น) ที่พัฒนาโดย Johansons [ 26 ]
ในปี พ.ศ. 2491 ศิลปินKenneth Snelsonได้สร้าง "X-Piece" อันล้ำสมัยของเขาขึ้นมาหลังจากการสำรวจทางศิลปะที่Black Mountain College (ซึ่งBuckminster Fullerกำลังบรรยายอยู่) และที่อื่นๆ อีกหลายปีต่อมา คำว่า "tensegrity" ถูกบัญญัติขึ้นโดย Fuller ซึ่งเป็นที่รู้จักกันดีในเรื่องโดมทรงเรขาคณิต ของเขา ตลอดอาชีพการงานของเขา Fuller ได้ทดลองกับการรวมส่วนประกอบที่รับแรงดึงเข้าไว้ในงานของเขา เช่น ในการสร้างโครงสร้างของบ้านdymaxion ของเขา [ 27 ]
นวัตกรรมของสเนลสันในปี 1948 กระตุ้นให้ฟุลเลอร์สั่งทำเสาจากสเนลสันทันที ในปี 1949 ฟุลเลอร์ได้พัฒนาไอโคซาเฮดรอนแบบเทนเซกริตีโดยใช้เทคโนโลยีดังกล่าว และเขากับนักเรียนของเขาได้พัฒนาโครงสร้างเพิ่มเติมและนำเทคโนโลยีนี้ไปใช้ในการสร้างโดมอย่างรวดเร็ว หลังจากหยุดพักไปช่วงหนึ่ง สเนลสันก็สร้างประติมากรรมจำนวนมากโดยใช้แนวคิดเทนเซกริตี ผลงานหลักของเขาเริ่มต้นในปี 1959 เมื่อมีการจัดนิทรรศการครั้งสำคัญที่พิพิธภัณฑ์ศิลปะสมัยใหม่ในนิทรรศการที่ MOMA ฟุลเลอร์ได้แสดงเสาและผลงานอื่นๆ ของเขา[ 28 ] ในนิทรรศการนี้ หลังจากหารือกับฟุลเลอร์และผู้จัดนิทรรศการเกี่ยวกับการให้เครดิตสำหรับเสา สเนลสันก็ได้แสดงผลงานบางส่วนในตู้กระจก ด้วย [ 29 ]
ผลงานที่มีชื่อเสียงที่สุดของสเนลสันคือ หอคอยเข็มสูง 26.5 เมตร (87 ฟุต) ที่สร้างขึ้นในปี 1968 [ 30 ]
คณิตศาสตร์ของเทนเซกริตี
การรับน้ำหนักของโครงสร้างเทนเซกริตีอย่างน้อยบางประเภททำให้เกิด การตอบสนอง แบบออเซติกและอัตราส่วนปัวซอง เชิงลบ เช่น ปริซึม T3 และไอโคซาเฮดรอนเทนเซกริตี 6 ค้ำยัน
ปริซึมเทนเซกริตี
โครงสร้างเทนเซกริตีสามแท่ง (ปริซึม 3 ทาง) มีคุณสมบัติที่ว่า สำหรับความยาว (ทั่วไป) ของสมาชิกรับแรงอัด "แท่ง" (มีทั้งหมดสามแท่ง) และความยาว (ทั่วไป) ของสายเคเบิลรับแรงดึง "เอ็น" (มีทั้งหมดหกเส้น) ที่เชื่อมต่อปลายแท่งเข้าด้วยกัน จะมีค่าเฉพาะสำหรับความยาว (ทั่วไป) ของเอ็นที่เชื่อมต่อส่วนบนของแท่งกับส่วนล่างของแท่งที่อยู่ติดกัน ซึ่งทำให้โครงสร้างรักษารูปทรงที่มั่นคง สำหรับโครงสร้างดังกล่าว สามารถพิสูจน์ได้อย่างง่ายดายว่าสามเหลี่ยมที่เกิดจากส่วนบนของแท่งและสามเหลี่ยมที่เกิดจากส่วนล่างของแท่งนั้นหมุนสัมพันธ์กันด้วยมุม 5π/6 (เรเดียน) [ 31 ]
Sultan และคณะ[ 32 ] ได้วิเคราะห์เสถียรภาพ ("ความสามารถในการรับแรงดึงล่วงหน้า") ของโครงสร้างเทนเซกริตี 2 ขั้นตอนหลายแบบ
ปริซึม T3 (หรือที่รู้จักกันในชื่อ Triplex) สามารถหาได้จากการค้นหารูปทรงของปริซึมสามเหลี่ยมตรง สถานะสมดุลในตัวเองจะเกิดขึ้นเมื่อสามเหลี่ยมฐานอยู่ในระนาบขนานกันโดยมีมุมบิด π/6 สูตรสำหรับสถานะความเค้นในตัวเองที่เป็นเอกลักษณ์จะแสดงโดย[ 33 ]ในที่นี้ ค่าลบสามค่าแรกสอดคล้องกับส่วนประกอบภายในที่อยู่ในสภาวะอัด ในขณะที่ค่าที่เหลือสอดคล้องกับสายเคเบิลที่อยู่ในสภาวะดึง
![{\displaystyle \omega =\omega _{1}[-{\sqrt {3}},-{\sqrt {3}},-{\sqrt {3}},{\sqrt {3}},{\sqrt {3}},{\sqrt {3}},1,1,1,1,1,1]^{T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdf881ba88de87799c28d2fcb13c5b26fe0febf2)
ไอโคซาเฮดราเทนเซกริตี



ไอ โคซาเฮดรอนแบบเทนเซ กริตี ซึ่งศึกษาครั้งแรกโดยสเนลสันในปี พ.ศ. 2492 [ 34 ] มีคานและเอ็นตามขอบของทรงหลายเหลี่ยมที่เรียกว่าไอโคซาเฮดรอนของเจสเซนเป็นโครงสร้างที่มั่นคง แม้ว่าจะมีความคล่องตัวเพียงเล็กน้อยก็ตาม[ 35 ] [ 36 ]เพื่อให้เห็นภาพนี้ ลองพิจารณาลูกบาศก์ที่มีความยาวด้าน2dโดยมีจุดศูนย์กลางอยู่ที่จุดกำเนิด วางคานที่มีความยาว2lในระนาบของแต่ละหน้าลูกบาศก์ โดยที่คานแต่ละอันขนานกับขอบด้านหนึ่งของหน้าและอยู่ตรงกลางของหน้านั้น ยิ่งไปกว่านั้น คานแต่ละอันควรขนานกับคานบนหน้าตรงข้ามของลูกบาศก์ แต่ตั้งฉากกับคานอื่นๆ ทั้งหมด ถ้าพิกัดคาร์ทีเซียนของคานหนึ่งคือ และ พิกัดของคานคู่ขนานจะเป็น และ ตาม ลำดับ พิกัดของปลายคานอีกข้าง (จุดยอด) จะได้จากการสลับพิกัด เช่น (สมมาตรแบบหมุนในแนวทแยงหลักของลูกบาศก์)





ระยะห่างsระหว่างจุดยอดที่อยู่ติดกันสองจุดใดๆ(0, d , l )และ( d , l , 0)คือ

ลองนึกภาพรูปทรงนี้ที่สร้างขึ้นจากคานค้ำที่มีความยาว2lและเอ็น (เชื่อมต่อจุดยอดที่อยู่ติดกัน) ที่มีความยาวsโดยที่ความสัมพันธ์นี้บอกเราว่ามีค่าd ที่เป็นไปได้สองค่า คือ ค่าหนึ่งเกิดจากการดันคานค้ำเข้าหากัน และอีกค่าหนึ่งเกิดจากการดึงคานค้ำออกจากกัน ในกรณีเฉพาะนี้ค่าสุดขั้วทั้งสองตรงกัน และดังนั้นรูปทรงนี้จึงเป็นไอโคซาเฮดรอนแบบเทนเซกริตีที่เสถียร การเลือกพารามิเตอร์นี้ทำให้จุดยอดอยู่ในตำแหน่งของไอโคซาเฮดรอนของเจสเซน ซึ่งแตกต่างจากไอโคซาเฮดรอนปกติซึ่งอัตราส่วนของและจะเป็นอัตราส่วนทองคำแทนที่จะเป็น 2 อย่างไรก็ตาม พิกัดทั้งสองชุดอยู่บนตระกูลตำแหน่งต่อเนื่องกันตั้งแต่คิวบอกตาเฮดรอนไปจนถึงออกตาเฮดรอน (ในกรณีขีดจำกัด) ซึ่งเชื่อมโยงกันด้วยการแปลงแบบหดตัว/ขยายตัวแบบเกลียว จลนศาสตร์ของคิวบอกตาเฮดรอนนี้คือเรขาคณิตของการเคลื่อนที่ของไอโคซาเฮดรอนแบบเทนเซกริตี HSM Coxeter [ 37 ]เป็นผู้บรรยายเรื่องนี้เป็นครั้งแรกและต่อมา Buckminster Fuller เรียกมันว่า "การแปลงร่างแบบจิเตอร์บัก" [ 38 ] [ 39 ]





เนื่องจากไอโคซาเฮดรอนเทนเซกริตีแสดงถึงจุดสุดขั้วของความสัมพันธ์ข้างต้น จึงมีความคล่องตัวน้อยมาก: การเปลี่ยนแปลงเล็กน้อยในความยาวs ของเอ็น (เช่น โดยการยืดเอ็น) ส่งผลให้ระยะทาง 2dของคานเปลี่ยนแปลงมากขึ้น[ 40 ]
สิทธิบัตร
- สิทธิบัตรสหรัฐอเมริกาหมายเลข 3,063,521 "โครงสร้างที่มีความสมบูรณ์ในการรับแรงดึง" 13 พฤศจิกายน 1962 บัคมินสเตอร์ ฟุลเลอร์
- สิทธิบัตรฝรั่งเศสหมายเลข 1,377,290, "Construction de Reseaux Autotendants", 28 กันยายน พ.ศ. 2507, David Georges Emmerich
- สิทธิบัตรฝรั่งเศสหมายเลข 1,377,291, "Structures Linéaires Autotendants", 28 กันยายน 1964, David Georges Emmerich
- สิทธิบัตรสหรัฐอเมริกาหมายเลข 3,139,957 "อาคารแขวนลอย" (เรียกอีกอย่างว่า aspension) ลงวันที่ 7 กรกฎาคม 1964 โดย Buckminster Fuller
- สิทธิบัตรสหรัฐอเมริกาหมายเลข 3,169,611 "โครงสร้างแรงดึงต่อเนื่อง แรงอัดไม่ต่อเนื่อง" 16 กุมภาพันธ์ 1965 เคนเนธ สเนลสัน
- สิทธิบัตรสหรัฐอเมริกาหมายเลข 3,866,366 "โครงสร้างรับแรงดึงแบบไม่สมมาตร" 18 กุมภาพันธ์ 1975 บัคมินสเตอร์ ฟุลเลอร์
โครงสร้างเทนเซกริตีพื้นฐาน
 โครงสร้างเทนเซกริตีที่ง่ายที่สุด คือ ปริซึม 3 ชิ้น
โครงสร้างเทนเซกริตีที่ง่ายที่สุด คือ ปริซึม 3 ชิ้น ปริซึม 3 อันอีกอันหนึ่ง
ปริซึม 3 อันอีกอันหนึ่ง โครงสร้างคล้ายกัน แต่มีชิ้นส่วนรับแรงอัดสี่ชิ้น
โครงสร้างคล้ายกัน แต่มีชิ้นส่วนรับแรงอัดสี่ชิ้น![ปริซึมต้นแบบเทนเซกริตี โดย คาร์ล ไอโอแกนสัน, 1921 [แกลเลอรี 1]](//upload.wikimedia.org/wikipedia/commons/thumb/6/6b/Proto-Tensegrity_by_Ioganson.jpg/120px-Proto-Tensegrity_by_Ioganson.jpg) ปริซึมต้นแบบเทนเซกริตี โดยคาร์ล ไอโอแกนสันปี 1921 [แกลเลอรี 1 ]
ปริซึมต้นแบบเทนเซกริตี โดยคาร์ล ไอโอแกนสันปี 1921 [แกลเลอรี 1 ]![ทรงยี่สิบหน้าแบบเทนเซกริตี โดย บัคมินสเตอร์ ฟุลเลอร์ ปี 1949 [แกลเลอรี 2]](//upload.wikimedia.org/wikipedia/commons/thumb/9/95/Tensegrity_Icosahedron.png/120px-Tensegrity_Icosahedron.png) ทรงยี่สิบหน้าแบบเทนเซกริตี โดยบัคมินสเตอร์ ฟุลเลอร์ปี 1949 [แกลเลอรี 2 ]
ทรงยี่สิบหน้าแบบเทนเซกริตี โดยบัคมินสเตอร์ ฟุลเลอร์ปี 1949 [แกลเลอรี 2 ]![Tensegrity Tetrahedron, Francesco della Salla, 1952[แกลเลอรี 3]](//upload.wikimedia.org/wikipedia/commons/thumb/a/af/Tensegrity_Tetrahedron.png/120px-Tensegrity_Tetrahedron.png) Tensegrity Tetrahedron, Francesco della Salla, 1952 [แกลเลอรี 3 ]
Tensegrity Tetrahedron, Francesco della Salla, 1952 [แกลเลอรี 3 ]![ทรงสี่เหลี่ยมพีระมิด X-Module Tentahedron โครงสร้าง Tensegrity โดย Kenneth Snelson ปี 1959 [แกลเลอรี 4]](//upload.wikimedia.org/wikipedia/commons/thumb/0/07/Tensegrity_X-Module_Tetrahedron.png/120px-Tensegrity_X-Module_Tetrahedron.png) ทรงสี่เหลี่ยมพีระมิด X-Module แบบ Tensegrity โดยKenneth Snelsonปี 1959 [แกลเลอรี 4 ]
ทรงสี่เหลี่ยมพีระมิด X-Module แบบ Tensegrity โดยKenneth Snelsonปี 1959 [แกลเลอรี 4 ]



![ปริซึมต้นแบบเทนเซกริตี โดย คาร์ล ไอโอแกนสัน, 1921 [แกลเลอรี 1]](https://upload.wikimedia.org/wikipedia/commons/thumb/6/6b/Proto-Tensegrity_by_Ioganson.jpg/120px-Proto-Tensegrity_by_Ioganson.jpg)
![ทรงยี่สิบหน้าแบบเทนเซกริตี โดย บัคมินสเตอร์ ฟุลเลอร์ ปี 1949 [แกลเลอรี 2]](https://upload.wikimedia.org/wikipedia/commons/thumb/9/95/Tensegrity_Icosahedron.png/120px-Tensegrity_Icosahedron.png)
![Tensegrity Tetrahedron, Francesco della Salla, 1952[แกลเลอรี 3]](https://upload.wikimedia.org/wikipedia/commons/thumb/a/af/Tensegrity_Tetrahedron.png/120px-Tensegrity_Tetrahedron.png)
![ทรงสี่เหลี่ยมพีระมิด X-Module Tentahedron โครงสร้าง Tensegrity โดย Kenneth Snelson ปี 1959 [แกลเลอรี 4]](https://upload.wikimedia.org/wikipedia/commons/thumb/0/07/Tensegrity_X-Module_Tetrahedron.png/120px-Tensegrity_X-Module_Tetrahedron.png)
โครงสร้างเทนเซกริตี
 ประติมากรรม Needle Tower ของKenneth Snelson
ประติมากรรม Needle Tower ของKenneth Snelson โดมโครงสร้างแบบเทนเซกริตีที่ทำจากเสาไม้สำหรับทำสวนและเชือกไนลอน สร้างขึ้นในบริเวณบ้าน ปี 2009
โดมโครงสร้างแบบเทนเซกริตีที่ทำจากเสาไม้สำหรับทำสวนและเชือกไนลอน สร้างขึ้นในบริเวณบ้าน ปี 2009 โครงสร้างเทนเซกริตีสูง 12 เมตร จัดแสดงอยู่ที่เมืองวิทยาศาสตร์โกลกาตา
โครงสร้างเทนเซกริตีสูง 12 เมตร จัดแสดงอยู่ที่เมืองวิทยาศาสตร์โกลกาตา Dissipateคือประติมากรรมรูปทรงหอคอยนาฬิกาทรายที่มีโครงสร้างแบบเทนเซกริตี สร้างขึ้นที่งาน AfrikaBurnปี 2015 ซึ่งเป็นส่วนหนึ่งของงานBurning Man ระดับภูมิภาค
Dissipateคือประติมากรรมรูปทรงหอคอยนาฬิกาทรายที่มีโครงสร้างแบบเทนเซกริตี สร้างขึ้นที่งาน AfrikaBurnปี 2015 ซึ่งเป็นส่วนหนึ่งของงานBurning Man ระดับภูมิภาค




{kind=link}
ดูเพิ่มเติม
- Cloud Nine – ที่อยู่อาศัยลอยฟ้าที่เสนอไว้ทรงกลมโครงสร้างโปร่งขนาดยักษ์ลอยอยู่บนท้องฟ้า ซึ่งตั้งชื่อโดย Buckminster Fuller
- โครงสร้างไฮเปอร์โบโลอิด – ประเภทของอาคารหรือสิ่งก่อสร้างที่มีรูปทรงพื้นผิวกำลังสองที่ไม่มีขอบเขต
- ทฤษฎีปฏิสัมพันธ์ของตัวแสดง
- หลังคาทรงอานม้า – ประเภทของโครงสร้างหลังคา
- โครงสร้างเฟรมอวกาศ – โครงสร้างโครงถักสามมิติที่แข็งแรงรับน้ำหนักได้
- ซินเนอร์เจติกส์ – การศึกษาเชิงประจักษ์ของระบบที่กำลังเปลี่ยนแปลง
- เทนแซริตี้
- โครงสร้างรับแรงดึง – โครงสร้างที่มีชิ้นส่วนรับแรงดึงเพียงอย่างเดียว
- โครงสร้างเปลือกบาง – องค์ประกอบโครงสร้างที่มีผนังบาง
- จลนศาสตร์ของทรงลูกบาศก์แปดเหลี่ยม – การแปลงสมมาตรของทรงลูกบาศก์แปดเหลี่ยมไปเป็นทรงหลายเหลี่ยมสม่ำเสมอที่เกี่ยวข้อง เรขาคณิตของการเคลื่อนที่ของทรงยี่สิบเหลี่ยมเทนเซกริตี
หมายเหตุ
- ↑โกเมซ-เฮาเรกี 2010 , หน้า. 28. มะเดื่อ 2.1
- ^ฟุลเลอร์และมาร์คส์ 1960 , รูปที่ 270
- ^ฟุลเลอร์และมาร์คส์ 1960 , รูปที่ 268.
- ^ลาลวานี 1996หน้า 47
บรรณานุกรม
- Fuller, R. Buckminster (1961). "Tensegrity" . Portfolio and Art News Annual (4): 112– 127, 144, 148.
- — (1982) [1975]. Synergetics: Explorations in the Geometry of Thinking . Vol. I. Macmillan. ISBN 978-0-02-065320-2.
- — (1983) [1979]. Synergetics 2: การสำรวจเพิ่มเติมในเรขาคณิตแห่งความคิดเล่ม 2 สำนักพิมพ์ Macmillan ISBN 978-0-02-092640-5.ออนไลน์
- —; Marks, Robert W. (1973) [1960]. โลกแห่ง Dymaxion ของ Buckminster Fuller . Anchor Books. รูปที่ 261–280. ISBN 978-0-385-01804-3.ภาพรวมที่ดีเกี่ยวกับขอบเขตของทฤษฎีเทนเซกริตีจากมุมมองของฟุลเลอร์ และภาพรวมที่น่าสนใจของโครงสร้างยุคแรก ๆ พร้อมการระบุที่มาอย่างละเอียดถี่ถ้วนในส่วนใหญ่
- เคนเนอร์, ฮิวจ์ (1976). คณิตศาสตร์เชิงเรขาคณิตและวิธีการใช้งาน . สำนักพิมพ์มหาวิทยาลัยแคลิฟอร์เนีย. ISBN 978-0-520-02924-8.พิมพ์ซ้ำปี 2003 ISBN 0520239318นี่เป็นจุดเริ่มต้นที่ดีสำหรับการเรียนรู้เกี่ยวกับคณิตศาสตร์ของโครงสร้างเทนเซกริตีและการสร้างแบบจำลอง
- โกเมซ-เฮาเรกี, วาเลนติน (2007) เทนเซกริด Estructuras Tensegríticas en Ciencia y Arte (ภาษาสเปน) ซานตานเดร์: Universidad de Cantabria. ไอเอสบีเอ็น 978-84-8102-437-1.
- — (2010) โครงสร้างแรงดึงและการประยุกต์กับสถาปัตยกรรม ซานตานเดร์: Servicio de Publicaciones de la Universidad de Cantabria. ไอเอสบีเอ็น 978-84-8102-575-0.
- Gough, Maria (ฤดูใบไม้ผลิ 1998). "ในห้องปฏิบัติการของลัทธิคอนสตรัคติวิซึม: โครงสร้างเย็นชาของ Karl Ioganson" ตุลาคม84 : 90– 117. doi : 10.2307 /779210 . JSTOR 779210 .
- Juan, SJ; Tur, JM (กรกฎาคม 2551). "กรอบโครงสร้างเทนเซกริตี: การทบทวนการวิเคราะห์สถิต". กลไกและทฤษฎีเครื่องจักร . 43 (7): 859– 81. Bibcode : 2008MeMaT..43..859J . CiteSeerX 10.1.1.574.7510 . doi : 10.1016/j.mechmachtheory.2007.06.010 .
- Korkmaz, Sinan; Bel Hadj Ali, Nizar; Smith, Ian FC (มิถุนายน 2011). "การกำหนดกลยุทธ์การควบคุมเพื่อความทนทานต่อความเสียหายของโครงสร้างเทนเซกริตีแบบแอคทีฟ" (PDF) . โครงสร้างทางวิศวกรรม . 33 (6): 1930– 1939. Bibcode : 2011EngSt..33.1930K . CiteSeerX 10.1.1.370.6243 . doi : 10.1016/j.engstruct.2011.02.031 . เก็บถาวรจากต้นฉบับ(PDF)เมื่อวันที่ 29 กันยายน 2011
- —; —; — (มกราคม 2555). "การกำหนดค่าระบบควบคุมเพื่อความทนทานต่อความเสียหายของสะพานเทนเซกริตี" . สารสนเทศวิศวกรรมขั้นสูง . 26 (1): 145– 155. doi : 10.1016/j.aei.2011.10.002 .
- Lalvani, Haresh, บรรณาธิการ (1996). "ต้นกำเนิดของเทนเซกริตี: มุมมองของ Emmerich, Fuller และ Snelson"วารสารโครงสร้างอวกาศนานาชาติ 11 ( 1– 2 ): 27– 55. doi : 10.1177/026635119601-204 . S2CID 114004009 .
- ซูซ่า, ทาเลส อาร์.; ฟอนเซกา, เซอร์จิโอ ต.; กอนซัลเวส, กาเบรียลา จี.; โอคาริโน, จูเลียนา ม.; มันชินี, มาริสา ซี. (ตุลาคม 2552) “แรงกดถูกเปิดเผยโดย Passive Co-tension ที่ข้อต่อข้อเท้า ” วารสารชีวกลศาสตร์ . 42 (14): 2374– 80. ดอย : 10.1016/j.jbiomech.2009.06.033 . PMID 19647832 .
อ่านเพิ่มเติม
- เอ็ดมอนด์สัน, เอมี่ (2007). "คำอธิบายที่สมบูรณ์ยิ่งขึ้น" , Emergent World LLC
- ฟอร์บส์, ปีเตอร์ (2010) [ 2006]. "9. ระบบการสร้างแบบผลักและดึง" เท้าของจิ้งจก : นักวิทยาศาสตร์เรียนรู้จากธรรมชาติอย่างไรฮาร์เปอร์ คอลลินส์ หน้า 197–230 ISBN 978-0-00-740547-3.
- Hanaor, Ariel (1997). "13. Tensegrity: Theory and Application"ใน Gabriel, J. François (บรรณาธิการ). Beyond the Cube: The Architecture of Space Frames and Polyhedra . Wiley. หน้า 385–408 . ISBN 978-0-471-12261-6.
- Masic, Milenko; Skelton, Robert E.; Gill, Philip E. (สิงหาคม 2548). "การค้นหารูปทรงเทนเซกริตีเชิงพีชคณิต". วารสารนานาชาติของของแข็งและโครงสร้าง . 42 ( 16– 17): 4833– 4858. doi : 10.1016/j.ijsolstr.2005.01.014 .พวกเขาได้นำเสนอผลลัพธ์ที่น่าทึ่งซึ่งแสดงให้เห็นว่าการแปลงเชิงเส้น ใดๆ ของโครงสร้างเทนเซกริตี ก็ยังคงได้โครงสร้างเทนเซกริตีเช่นกัน
- Morgan, GJ (2003). "การทบทวนประวัติศาสตร์: ไวรัส ผลึก และโดมทรงเรขาคณิต"แนวโน้มในวิทยาศาสตร์ชีวเคมี 28 ( 2): 86– 90. doi : 10.1016/S0968-0004(02)00007-5 . PMID 12575996 .
- Motro, R. (1992). "ระบบเท นเซกริตี: สถานะของศิลปะ". วารสารโครงสร้างอวกาศนานาชาติ7 (2): 75– 84. doi : 10.1177/026635119200700201 . S2CID 107820090 .
- พิวจ์, แอนโทนี (1976). บทนำสู่เทนเซกริตี . สำนักพิมพ์มหาวิทยาลัยแคลิฟอร์เนีย. ISBN 978-0-520-03055-8เก็บถาวรจากต้นฉบับเมื่อวันที่ 4 พฤษภาคม 2551 เรียกดูเมื่อวันที่ 9 พฤษภาคม 2551
- สเนลสัน, เคนเนธ (พฤศจิกายน 1990). "จดหมายถึง อาร์. โมโทร" . วารสารโครงสร้างอวกาศนานาชาติ .
- วิลเนย์, โอเรน (1990). โครงตาข่ายเคเบิลและเปลือกเทนเซกริก: การวิเคราะห์และการประยุกต์ใช้งานด้านการออกแบบ , นิวยอร์ก: เอลลิส ฮอร์วูด จำกัด
- Wang, Bin-Bing (1998). "ระบบเคเบิล-สตรัท: ตอนที่ 1 – เทนเซกริตี". วารสารวิจัยเหล็กโครงสร้าง45 (3): 281– 89. doi : 10.1016/S0143-974X(97)00075-8 .
- วิลเคน, ทิโมธี (2001). การแสวงหาของขวัญแห่งเทนเซกริตี , ทรัสต์มาร์ค
ลิงก์ภายนอก
- ผลงานตีพิมพ์ทางวิทยาศาสตร์ในสาขาเทนเซกริตีโดยสถาบันเทคโนโลยีแห่งสหพันธรัฐสวิส (EPFL) ห้องปฏิบัติการคอมพิวเตอร์ประยุกต์และกลศาสตร์ (IMAC)
- เว็บไซต์ Biotensegrity ของ Stephen Levinมีบทความหลายฉบับเกี่ยวกับกลศาสตร์เทนเซกริตีของโครงสร้างทางชีวภาพ ตั้งแต่ไวรัสไปจนถึงสัตว์มีกระดูกสันหลัง โดยศัลยแพทย์กระดูกและข้อ
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ เทนเซกริตี
Tensegrity , tensional integrityหรือfloating compressionเป็น หลักการ โครงสร้างที่อิงตามระบบของส่วนประกอบที่แยกออกจากกันภายใต้แรงอัดภายในเครือข่ายของแรงดึง ต่อเนื่อง...
สถาปัตยกรรม
องค์ประกอบพื้นฐานเชิงแนวคิดของโครงสร้างเทนเซกริตีสามารถเห็นได้ใน สกายลอน (Skylon ) ปี 1951 สายเคเบิล หกเส้น โดยสามเส้นอยู่ที่ปลายแต่ละด้าน ยึดหอคอยไว้ในตำแหน่ง สายเคเบิลสามเส้นที่เชื่อมต่อกับด้านล่าง "กำหนด" ตำแหน่งของหอคอย...
หุ่นยนต์
ตั้งแต่ช่วงต้นทศวรรษ 2000 เป็นต้นมา เทนเซกริตีได้รับความสนใจจากนักวิทยาศาสตร์หุ่นยนต์มากขึ้น เนื่องจากมีศักยภาพในการออกแบบหุ่นยนต์ที่มีน้ำหนักเบาและทนทาน งานวิจัยจำนวนมากได้ศึกษาหุ่นยนต์สำรวจเทนเซกริตี [ 6 ] หุ่นยนต์เลียนแบบชีวภาพ [ 7 ] [ 8 ] [ 9 ]...
กายวิภาคศาสตร์
ไบโอเทนเซกริตี (Biotensegrity) ซึ่ง เป็นคำที่สตีเฟน เลวิน (Stephen Levin) บัญญัติขึ้น เป็นการประยุกต์ใช้หลักการเทนเซกริตีในเชิงทฤษฎีที่ขยายออกไปสำหรับโครงสร้างทางชีวภาพ [ 12 ] โครงสร้างทางชีวภาพ เช่น กล้ามเนื้อ กระดูก พังผืด เอ็น และเส้นเอ็น หรือ เยื่อ หุ้ม...