อ่าน 20 นาที
กล้องจุลทรรศน์แรงอะตอม
กล้องจุลทรรศน์แรงอะตอม ( AFM ) หรือกล้องจุลทรรศน์แรงสแกน ( SFM ) เป็น กล้องจุลทรรศน์แบบหัววัดสแกน (SPM) ที่มีความละเอียดสูงมากโดยมีความละเอียดในระดับเศษส่วนของนาโนเมตร...
กล้องจุลทรรศน์แรงอะตอม
กล้องจุลทรรศน์แรงอะตอม ( AFM ) หรือกล้องจุลทรรศน์แรงสแกน ( SFM ) เป็น กล้องจุลทรรศน์แบบหัววัดสแกน (SPM) ที่มีความละเอียดสูงมากโดยมีความละเอียดในระดับเศษส่วนของนาโนเมตร ซึ่งดีกว่าขีดจำกัดการเลี้ยวเบนของแสง ถึงกว่า 1,000 เท่า
ภาพรวม

กล้องจุลทรรศน์แรงอะตอม[ 1 ] (AFM) รวบรวมข้อมูลโดยการ "สัมผัส" หรือ "จับ" พื้นผิวด้วยหัววัดเชิงกล องค์ประกอบ เพียโซอิเล็กทริกที่อำนวยความสะดวกในการเคลื่อนไหวเล็กๆ แต่แม่นยำและเที่ยงตรงตามคำสั่ง (อิเล็กทรอนิกส์) ช่วยให้สามารถสแกนได้อย่างแม่นยำ แม้จะมีชื่อว่ากล้องจุลทรรศน์แรงอะตอม แต่ก็ไม่ได้ใช้แรง นิวเคลียร์
ความสามารถและความละเอียดเชิงพื้นที่
เครื่อง AFM มีความสามารถหลักสามประการ ได้แก่ การวัดแรง การสร้างภาพภูมิประเทศ และการควบคุมวัตถุ
ในการวัดแรง กล้องจุลทรรศน์แรงอะตอม (AFM) สามารถใช้ในการวัดแรงระหว่างหัววัดและตัวอย่างโดยขึ้นอยู่กับระยะห่างระหว่างกัน ซึ่งสามารถนำไปประยุกต์ใช้ในการทำสเปกโทรสโกปีแรงเพื่อวัดคุณสมบัติทางกลของตัวอย่าง เช่นโมดูลัสของยัง (Young's modulus ) ซึ่งเป็นตัววัดความแข็ง ของตัวอย่าง
สำหรับการสร้างภาพนั้น ปฏิกิริยาของหัววัดต่อแรงที่ตัวอย่างกระทำต่อหัววัด สามารถนำมาใช้สร้างภาพรูปร่างสามมิติ (ภูมิประเทศ) ของพื้นผิวตัวอย่างได้ที่ความละเอียดสูง วิธีการนี้ทำได้โดยการสแกนตำแหน่งของตัวอย่างเทียบกับปลายหัววัดแบบแรสเตอร์ และบันทึกความสูงของหัววัดที่สอดคล้องกับการปฏิสัมพันธ์ระหว่างหัววัดกับตัวอย่างที่คงที่ โดยทั่วไปแล้ว ภูมิประเทศของพื้นผิวจะแสดงเป็นแผนภาพ สีเสมือน
แม้ว่าการตีพิมพ์ครั้งแรกเกี่ยวกับกล้องจุลทรรศน์แรงอะตอมโดย Binnig, Quate และ Gerber ในปี 1986 จะคาดการณ์ถึงความเป็นไปได้ในการบรรลุความละเอียดระดับอะตอม แต่ความท้าทายในการทดลองที่สำคัญต้องได้รับการแก้ไขก่อนที่จะมีการสาธิตความละเอียดระดับอะตอมของข้อบกพร่องและขอบขั้นบันไดในสภาวะแวดล้อม (ของเหลว) ในปี 1993 โดย Ohnesorge และ Binnig [ 2 ]ความละเอียดระดับอะตอมที่แท้จริงของพื้นผิวซิลิคอน 7×7 ต้องรออีกเล็กน้อยก่อนที่จะได้รับการสาธิตโดย Giessibl [ 3 ]ความละเอียดระดับย่อยอะตอม (เช่น ความสามารถในการแยกแยะรายละเอียดโครงสร้างภายในความหนาแน่นของอิเล็กตรอนของอะตอมเดี่ยว) ก็ได้รับการบรรลุโดย AFM แล้วเช่นกัน
ในการควบคุมการเคลื่อนที่ของหัววัด แรงระหว่างหัววัดและตัวอย่างสามารถนำมาใช้เปลี่ยนแปลงคุณสมบัติของตัวอย่างได้อย่างเป็นระบบ ตัวอย่างเช่น การควบคุมอะตอมการพิมพ์หินด้วยหัววัดแบบสแกนและการกระตุ้นเซลล์เฉพาะจุด
พร้อมกับการได้มาซึ่งภาพภูมิประเทศ คุณสมบัติอื่นๆ ของตัวอย่างสามารถวัดได้ในพื้นที่และแสดงเป็นภาพ ซึ่งมักมีความละเอียดสูงเช่นเดียวกัน ตัวอย่างของคุณสมบัติดังกล่าว ได้แก่ คุณสมบัติทางกล เช่น ความแข็งหรือความแข็งแรงในการยึดเกาะ และคุณสมบัติทางไฟฟ้า เช่น การนำไฟฟ้าหรือศักยภาพพื้นผิว[ 4 ]ในความเป็นจริง เทคนิค SPM ส่วนใหญ่เป็นส่วนขยายของ AFM ที่ใช้โหมดนี้[ 5 ]
เทคโนโลยีกล้องจุลทรรศน์อื่นๆ
ความแตกต่างที่สำคัญระหว่างกล้องจุลทรรศน์แรงอะตอม (AFM) กับเทคโนโลยีอื่นๆ เช่น กล้องจุลทรรศน์แบบใช้แสงและกล้องจุลทรรศน์อิเล็กตรอนคือ AFM ไม่ใช้เลนส์หรือการฉายลำแสง ดังนั้นจึงไม่มีข้อจำกัดด้านความละเอียดเชิงพื้นที่เนื่องจากการเลี้ยวเบนและการคลาดเคลื่อน และไม่จำเป็นต้องเตรียมพื้นที่สำหรับนำทางลำแสง (โดยการสร้างสุญญากาศ) และย้อมสีตัวอย่าง
มีกล้องจุลทรรศน์แบบสแกนหลายประเภท ได้แก่ SPM (ซึ่งรวมถึง AFM, กล้องจุลทรรศน์แบบสแกนอุโมงค์ (STM) และกล้องจุลทรรศน์แบบสแกนแสงใกล้สนาม (SNOM/NSOM), กล้องจุลทรรศน์ STED (STED), กล้องจุลทรรศน์อิเล็กตรอนแบบสแกนและAFM ทางไฟฟ้าเคมี (EC-AFM)) แม้ว่า SNOM และ STED จะใช้ แสง ที่มองเห็นได้แสงอินฟราเรดหรือแม้แต่ แสง เทราเฮิร์ตซ์ในการส่องสว่างตัวอย่าง แต่ความละเอียดของกล้องจุลทรรศน์เหล่านี้ไม่ได้ถูกจำกัดด้วยขีดจำกัดการเลี้ยวเบน
การกำหนดค่า
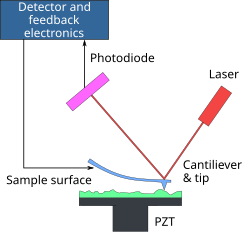
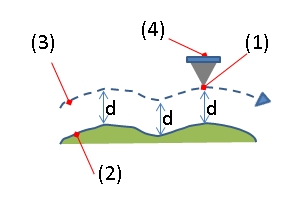
รูปที่ 3 แสดง AFM ซึ่งโดยทั่วไปประกอบด้วยคุณลักษณะดังต่อไปนี้[ 6 ]ตัวเลขในวงเล็บสอดคล้องกับคุณลักษณะที่มีหมายเลขในรูปที่ 3 ทิศทางพิกัดถูกกำหนดโดยระบบพิกัด (0)

คานยื่นขนาดเล็กคล้ายสปริง(1) ถูกยึดไว้ด้วยตัวรองรับ (2) โดยอาจมีการใช้ชิ้นส่วนเพียโซอิเล็กทริก (โดยทั่วไปทำจากวัสดุเซรามิก) (3) เพื่อทำให้คานยื่น (1) สั่น ปลายแหลม (4) ถูกยึดติดกับปลายอิสระของคานยื่น (1) ตัวตรวจจับ (5) จะบันทึกการเบี่ยงเบนและการเคลื่อนที่ของคานยื่น (1) ตัวอย่าง (6) ถูกติดตั้งบนแท่นวางตัวอย่าง (8) กลไกขับเคลื่อน xyz (7) ช่วยให้สามารถเคลื่อนที่ตัวอย่าง (6) และแท่นวางตัวอย่าง (8) ในทิศทาง x, y และ z เทียบกับปลายแหลม (4) แม้ว่ารูปที่ 3 จะแสดงกลไกขับเคลื่อนที่ติดอยู่กับตัวอย่าง แต่กลไกขับเคลื่อนก็สามารถติดอยู่กับปลายแหลมได้เช่นกัน หรืออาจติดกลไกขับเคลื่อนอิสระกับทั้งสองอย่างก็ได้ เนื่องจากเป็นการควบคุมการเคลื่อนที่สัมพัทธ์ของตัวอย่างและปลายแหลม ตัวควบคุมและเครื่องพล็อตเตอร์ไม่ได้แสดงในรูปที่ 3
ตามการจัดเรียงที่อธิบายไว้ข้างต้น ปฏิสัมพันธ์ระหว่างปลายหัววัดและตัวอย่าง ซึ่งอาจเป็นปรากฏการณ์ระดับอะตอม จะถูกแปลงเป็นความเปลี่ยนแปลงของการเคลื่อนที่ของคานยื่น ซึ่งเป็นปรากฏการณ์ระดับมหภาค สามารถใช้ลักษณะการเคลื่อนที่ของคานยื่นหลายแง่มุมเพื่อวัดปริมาณปฏิสัมพันธ์ระหว่างปลายหัววัดและตัวอย่างได้ โดยทั่วไปแล้วจะใช้ค่าการเบี่ยงเบน แอมพลิจูดของการสั่นที่กำหนดของคานยื่น หรือการเปลี่ยนแปลงความถี่เรโซแนนซ์ของคานยื่น (ดูส่วนโหมดการถ่ายภาพ)
เครื่องตรวจจับ
ตัวตรวจจับ (5) ของ AFM จะวัดการเบี่ยงเบน (การเคลื่อนที่เมื่อเทียบกับตำแหน่งสมดุล) ของคานยื่นและแปลงเป็นสัญญาณไฟฟ้า ความเข้มของสัญญาณนี้จะเป็นสัดส่วนกับการเคลื่อนที่ของคานยื่น
สามารถใช้วิธีการตรวจจับได้หลากหลาย เช่น อินเตอร์เฟอโรเมตรี คันโยกแสง วิธีการเพียโซอิเล็กทริก และตัวตรวจจับแบบ STM (ดูหัวข้อ "การวัดการเบี่ยงเบนของคาน AFM")
การสร้างภาพ
ส่วนนี้ใช้กับการสร้างภาพในโหมด § Contact โดยเฉพาะ สำหรับโหมดการสร้างภาพอื่นๆ กระบวนการจะคล้ายกัน ยกเว้นว่า "การเบี่ยงเบน" ควรถูกแทนที่ด้วยตัวแปรป้อนกลับที่เหมาะสม
เมื่อใช้ AFM ในการถ่ายภาพตัวอย่าง ปลายหัววัดจะสัมผัสกับตัวอย่าง และตัวอย่างจะถูกสแกนแบบแรสเตอร์ไปตามตาราง x–y โดยทั่วไปแล้ว จะใช้ลูปป้อนกลับทางอิเล็กทรอนิกส์เพื่อรักษาแรงระหว่างหัววัดกับตัวอย่างให้คงที่ในระหว่างการสแกน ลูปป้อนกลับนี้รับค่าการเบี่ยงเบนของแคนติเลเวอร์เป็นอินพุต และเอาต์พุตจะควบคุมระยะห่างตามแกน z ระหว่างตัวรองรับหัววัด (2 ในรูปที่ 3) และตัวรองรับตัวอย่าง (8 ในรูปที่ 3) ตราบใดที่ปลายหัววัดยังคงสัมผัสกับตัวอย่าง และตัวอย่างถูกสแกนในระนาบ x–y การเปลี่ยนแปลงความสูงของตัวอย่างจะทำให้การเบี่ยงเบนของแคนติเลเวอร์เปลี่ยนแปลงไป จากนั้นลูปป้อนกลับจะปรับความสูงของตัวรองรับหัววัดเพื่อให้การเบี่ยงเบนกลับคืนสู่ค่าที่ผู้ใช้กำหนด (จุดตั้งค่า) ลูปป้อนกลับที่ปรับอย่างเหมาะสมจะปรับระยะห่างระหว่างตัวรองรับกับตัวอย่างอย่างต่อเนื่องในระหว่างการเคลื่อนที่สแกน เพื่อให้การเบี่ยงเบนคงที่โดยประมาณ ในสถานการณ์นี้ เอาต์พุตของลูปป้อนกลับจะเท่ากับลักษณะพื้นผิวของตัวอย่างโดยมีความคลาดเคลื่อนเล็กน้อย
ในอดีต วิธีการทำงานที่แตกต่างออกไปได้ถูกนำมาใช้ โดยที่ระยะห่างระหว่างตัวอย่างกับหัววัดจะคงที่และไม่ควบคุมด้วยระบบป้อนกลับ ( กลไกเซอร์โว ) ในโหมดนี้ ซึ่งโดยทั่วไปเรียกว่า "โหมดความสูงคงที่" การเบี่ยงเบนของคานยื่นจะถูกบันทึกเป็นฟังก์ชันของตำแหน่ง x-y ของตัวอย่าง ตราบใดที่ปลายหัววัดสัมผัสกับตัวอย่าง การเบี่ยงเบนก็จะสอดคล้องกับลักษณะพื้นผิว วิธีนี้ปัจจุบันไม่ค่อยได้ใช้แล้ว เนื่องจากแรงระหว่างปลายหัววัดกับตัวอย่างไม่ได้รับการควบคุม ซึ่งอาจทำให้แรงสูงมากพอที่จะทำให้ปลายหัววัดหรือตัวอย่างเสียหายได้ อย่างไรก็ตาม เป็นเรื่องปกติที่จะบันทึกการเบี่ยงเบนแม้ในขณะที่สแกนในโหมดแรงคงที่โดยใช้ระบบป้อนกลับ การทำเช่นนี้จะเผยให้เห็นข้อผิดพลาดเล็กน้อยในการติดตามของระบบป้อนกลับ และบางครั้งอาจเผยให้เห็นคุณลักษณะที่ระบบป้อนกลับไม่สามารถปรับได้
สัญญาณ AFM เช่น ความสูงของตัวอย่างหรือการเบี่ยงเบนของคานยื่น จะถูกบันทึกไว้ในคอมพิวเตอร์ระหว่างการสแกนในแนวแกน x–y จากนั้นจะแสดงผลเป็น ภาพ สีเสมือนโดยแต่ละพิกเซลจะแสดงตำแหน่ง x–y บนตัวอย่าง และสีจะแสดงถึงสัญญาณที่บันทึกไว้
ประวัติศาสตร์
AFM ถูกคิดค้นโดยนักวิทยาศาสตร์ของ IBM ในปี 1985 [ 7 ]เครื่องมือต้นแบบของ AFM คือกล้องจุลทรรศน์แบบสแกนอุโมงค์ (STM) ซึ่งพัฒนาโดยGerd BinnigและHeinrich Rohrerในช่วงต้นทศวรรษ 1980 ที่IBM Research – Zurichซึ่งการพัฒนานี้ทำให้พวกเขาได้รับรางวัลโนเบลสาขาฟิสิกส์ ในปี 1986 Binnig เป็นผู้คิดค้น[ 6 ]กล้องจุลทรรศน์แรงอะตอม และการนำไปใช้งานจริงครั้งแรกเกิดขึ้นโดย Binnig, QuateและGerberในปี 1986 [ 8 ]
กล้องจุลทรรศน์แรงอะตอม (AFM) เครื่องแรกที่วางจำหน่ายในเชิงพาณิชย์เปิดตัวในปี 1989 AFM เป็นหนึ่งในเครื่องมือสำคัญที่สุดสำหรับการสร้างภาพ การวัด และการจัดการสสารในระดับนาโนสเกล
แอปพลิเคชัน
กล้องจุลทรรศน์แรงอะตอม (AFM) ได้ถูกนำไปประยุกต์ใช้กับปัญหาต่างๆ ในหลากหลายสาขาวิทยาศาสตร์ธรรมชาติ รวมถึงฟิสิกส์ ของของแข็ง วิทยาศาสตร์และเทคโนโลยีเซมิคอนดักเตอร์ วิศวกรรมโมเลกุลเคมีและฟิสิกส์ของ พอลิเมอ ร์เคมีพื้นผิวชีววิทยาโมเลกุลชีววิทยาของเซลล์และการ แพทย์
การประยุกต์ใช้ในสาขาฟิสิกส์ของของแข็ง ได้แก่ (ก) การระบุอะตอมบนพื้นผิว (ข) การประเมินปฏิสัมพันธ์ระหว่างอะตอมเฉพาะกับอะตอมข้างเคียง และ (ค) การศึกษาการเปลี่ยนแปลงคุณสมบัติทางกายภาพที่เกิดจากการเปลี่ยนแปลงการจัดเรียงอะตอมผ่านการจัดการอะตอม
ในชีววิทยาระดับโมเลกุล AFM สามารถนำมาใช้ศึกษาโครงสร้างและคุณสมบัติทางกลของกลุ่มโปรตีนและโครงสร้างต่างๆ ได้ ตัวอย่างเช่น AFM ถูกนำมาใช้ในการสร้างภาพไมโครทิวบูลและวัดความแข็งของไมโครทิวบูล
ในชีววิทยาของเซลล์ กล้องจุลทรรศน์แรงอะตอม (AFM) สามารถใช้เพื่อพยายามแยกแยะเซลล์มะเร็งและเซลล์ปกติโดยอาศัยความแข็งของเซลล์ และเพื่อประเมินปฏิสัมพันธ์ระหว่างเซลล์เฉพาะกับเซลล์ข้างเคียงในระบบการเพาะเลี้ยงแบบแข่งขัน นอกจากนี้ AFM ยังสามารถใช้ในการสร้างรอยบุ๋มบนเซลล์ เพื่อศึกษาว่าเซลล์ควบคุมความแข็งหรือรูปร่างของเยื่อหุ้มเซลล์หรือผนังเซลล์ได้อย่างไร
ในบางรูปแบบ ศักยภาพทางไฟฟ้ายังสามารถสแกนได้โดยใช้คานยื่นนำไฟฟ้า ในเวอร์ชันที่ทันสมัยกว่านั้นกระแสไฟฟ้าสามารถส่งผ่านปลายเพื่อตรวจสอบการนำไฟฟ้าหรือการขนส่งของพื้นผิวด้านล่างได้ แต่เป็นงานที่ท้าทาย โดยมีกลุ่มวิจัยเพียงไม่กี่กลุ่มที่รายงานข้อมูลที่สอดคล้องกัน (ณ ปี 2547) [ 9 ] เทคนิค AFM เช่นกล้องจุลทรรศน์แรงอะตอมนำไฟฟ้า (C-AFM) และกล้องจุลทรรศน์แรงโพรบเคลวิน (KPFM) ถูกนำมาใช้มากขึ้นใน การวิจัย แบตเตอรี่โซลิดสเตทเพื่อวิเคราะห์ความแปรผันของการนำไฟฟ้าเฉพาะที่ การเปลี่ยนแปลงศักยภาพที่ส่วนต่อประสาน และกลไกการเสื่อมสภาพในระดับนาโน
หลักการ


AFM ประกอบด้วยคานยื่นที่มีปลายแหลม (โพรบ) ที่ปลายซึ่งใช้ในการสแกนพื้นผิวของชิ้นงาน คานยื่นมักทำจากซิลิคอนหรือซิลิคอนไนไตรด์ ที่มี รัศมีโค้งของปลายอยู่ในระดับนาโนเมตร เมื่อนำปลายเข้าใกล้พื้นผิวของชิ้นงาน แรงระหว่างปลายและชิ้นงานจะทำให้คานยื่นเบี่ยงเบนไปตามกฎของฮุก [ 10 ] ขึ้นอยู่กับสถานการณ์ แรงที่วัดได้ใน AFM ได้แก่ แรงสัมผัสเชิงกล แรงแวนเดอร์วาลส์ แรงคาปิลลารีพันธะเคมี แรงไฟฟ้าสถิตแรงแม่เหล็ก (ดูกล้องจุลทรรศน์แรงแม่เหล็ก MFM) แรงแคสิเมีย ร์ แรงการละลายฯลฯ นอกจากแรงแล้ว ยังสามารถวัดปริมาณเพิ่มเติมได้พร้อมกันโดยใช้โพรบชนิดพิเศษ (ดูกล้องจุลทรรศน์ความร้อนแบบสแกน กล้องจุลทรรศน์การขยายตัวของจูลแบบสแกนกล้องจุลทรรศน์สเปกโทรสโกปีความร้อนด้วยแสงฯลฯ)

AFM สามารถทำงานได้หลายโหมด ขึ้นอยู่กับการใช้งาน โดยทั่วไป โหมดการถ่ายภาพที่เป็นไปได้จะแบ่งออกเป็นโหมดคงที่ (เรียกอีกอย่างว่าโหมดสัมผัส ) และโหมดไดนามิกหลากหลาย (แบบไม่สัมผัสหรือ "การแตะ") ซึ่งคานยื่นจะสั่นหรือแกว่งด้วยความถี่ที่กำหนด[ 8 ]
โหมดการถ่ายภาพ
โดยทั่วไป การทำงานของ AFM จะถูกอธิบายว่าเป็นหนึ่งในสามโหมดตามลักษณะการเคลื่อนที่ของปลายหัววัด ได้แก่ โหมดสัมผัส หรือที่เรียกว่าโหมดคงที่ (ตรงข้ามกับอีกสองโหมดที่เรียกว่าโหมดไดนามิก) โหมดแตะ หรือที่เรียกว่าการสัมผัสแบบไม่ต่อเนื่อง โหมด AC หรือโหมดสั่น หรือเรียกอีกอย่างว่า AFM แบบปรับความกว้างของคลื่นตามกลไกการตรวจจับ และโหมดไม่สัมผัส หรือเรียกอีกอย่างว่า AFM แบบปรับความถี่ตามกลไกการตรวจจับ
แม้ว่าชื่อเรียกจะบ่งบอกเช่นนั้น แต่การสัมผัสแบบผลักกันสามารถเกิดขึ้นหรือหลีกเลี่ยงได้ทั้งใน AFM แบบปรับความกว้างของคลื่นและ AFM แบบปรับความถี่ ขึ้นอยู่กับการตั้งค่า
โหมดการติดต่อ
ในโหมดสัมผัส ปลายหัววัดจะถูก "ลาก" ไปบนพื้นผิวของตัวอย่าง และรูปทรงของพื้นผิวจะถูกวัดโดยใช้การเบี่ยงเบนของคานยื่นโดยตรง หรือที่พบได้บ่อยกว่าคือ การใช้สัญญาณป้อนกลับที่จำเป็นในการรักษาคานยื่นให้อยู่ในตำแหน่งคงที่ เนื่องจากการวัดสัญญาณคงที่นั้นมีแนวโน้มที่จะเกิดสัญญาณรบกวนและการเบี่ยงเบน จึงใช้คานยื่นที่มีความแข็งต่ำ (เช่น คานยื่นที่มีค่าคงที่สปริง k ต่ำ) เพื่อให้ได้สัญญาณการเบี่ยงเบนที่มากพอในขณะที่รักษาแรงปฏิกิริยาให้ต่ำ ใกล้กับพื้นผิวของตัวอย่าง แรงดึงดูดอาจค่อนข้างแรง ทำให้ปลายหัววัด "งับ" เข้ากับพื้นผิว ดังนั้น การวัด AFM ในโหมดสัมผัสจึงมักทำที่ความลึกที่แรงโดยรวมเป็นแรงผลัก นั่นคือ อยู่ใน "การสัมผัส" ที่แน่นกับพื้นผิวของแข็ง
โหมดการแตะ
ในสภาวะแวดล้อม ตัวอย่างส่วนใหญ่จะเกิดชั้นเมนิสคัสของเหลวขึ้น เนื่องจากเหตุนี้ การรักษาปลายโพรบให้อยู่ใกล้กับตัวอย่างมากพอที่จะตรวจจับแรงระยะสั้นได้ ในขณะเดียวกันก็ป้องกันไม่ให้ปลายโพรบติดกับพื้นผิว จึงเป็นปัญหาสำคัญสำหรับโหมดสัมผัสในสภาวะแวดล้อม โหมดสัมผัสแบบไดนามิก (เรียกอีกอย่างว่าโหมดสัมผัสแบบไม่ต่อเนื่อง โหมด AC หรือโหมดแตะ) ได้รับการพัฒนาขึ้นเพื่อแก้ปัญหานี้[ 12 ]ปัจจุบัน โหมดแตะเป็นโหมด AFM ที่ใช้บ่อยที่สุดเมื่อทำงานในสภาวะแวดล้อมหรือในของเหลว
ในโหมดแตะ (tapping mode ) คานยื่นจะถูกขับเคลื่อนให้สั่นขึ้นลงที่ความถี่ใกล้เคียงกับความถี่เรโซแนนซ์ การสั่นนี้มักทำได้โดยใช้ชิ้นส่วนเพียโซขนาดเล็กในตัวยึดคานยื่น แต่ก็อาจใช้สนามแม่เหล็กกระแสสลับ (กับคานยื่นแม่เหล็ก) คานยื่นเพียโซอิเล็กทริก หรือการให้ความร้อนเป็นระยะด้วยลำแสงเลเซอร์แบบปรับความถี่ได้ แอมพลิจูดของการสั่นนี้โดยทั่วไปจะแตกต่างกันไปตั้งแต่หลายนาโนเมตรถึง 200 นาโนเมตร ในโหมดแตะ ความถี่และแอมพลิจูดของสัญญาณขับเคลื่อนจะคงที่ ทำให้แอมพลิจูดของการสั่นของคานยื่นคงที่ตราบใดที่ไม่มีการเลื่อนหรือการปฏิสัมพันธ์กับพื้นผิว การปฏิสัมพันธ์ของแรงที่กระทำต่อคานยื่นเมื่อปลายเข้าใกล้พื้นผิว เช่นแรงแวนเดอร์วาลส์ ปฏิสัมพันธ์แบบไดโพล - ไดโพลแรงไฟฟ้าสถิตฯลฯ ทำให้แอมพลิจูดของการสั่นของคานยื่นเปลี่ยนแปลง (โดยปกติจะลดลง) เมื่อปลายเข้าใกล้ตัวอย่างมากขึ้น แอมพลิจูดนี้ใช้เป็นพารามิเตอร์ที่ป้อนเข้าสู่เซอร์โวอิเล็กทรอนิกส์ซึ่งควบคุมความสูงของคานยื่นเหนือตัวอย่าง เซอร์โวจะปรับความสูงเพื่อรักษาระดับแอมพลิจูดการสั่นของคานยื่นให้คงที่ในขณะที่คานยื่นถูกสแกนเหนือตัวอย่าง ดังนั้นภาพ AFM แบบแตะจึงถูกสร้างขึ้นโดยการสร้างภาพแรงของการสัมผัสเป็นระยะๆ ของปลายกับพื้นผิวตัวอย่าง[ 13 ]
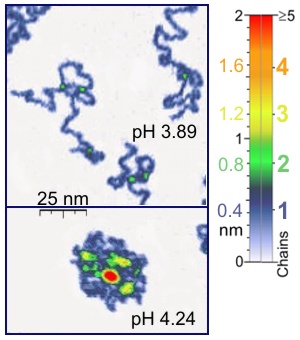
แม้ว่าแรงสูงสุดที่ใช้ระหว่างส่วนสัมผัสของการสั่นอาจสูงกว่าที่ใช้โดยทั่วไปในโหมดสัมผัสมาก แต่โหมดแตะโดยทั่วไปจะลดความเสียหายที่เกิดขึ้นกับพื้นผิวและปลายเมื่อเทียบกับปริมาณที่เกิดขึ้นในโหมดสัมผัส ซึ่งสามารถอธิบายได้จากระยะเวลาสั้นของแรงที่ใช้ และเนื่องจากแรงด้านข้างระหว่างปลายและตัวอย่างนั้นต่ำกว่าอย่างมากในโหมดแตะเมื่อเทียบกับโหมดสัมผัส การถ่ายภาพในโหมดแตะมีความอ่อนโยนเพียงพอแม้กระทั่งสำหรับการมองเห็นชั้นไขมัน ที่รองรับ หรือโมเลกุลพอลิเมอร์เดี่ยวที่ดูดซับ (เช่น โซ่พอลิอิเล็กโทรไลต์ สังเคราะห์หนา 0.4 นาโนเมตร ) ภายใต้ตัวกลางของเหลว ด้วยพารามิเตอร์การสแกนที่เหมาะสม โครงสร้างของโมเลกุลเดี่ยวสามารถคงอยู่ไม่เปลี่ยนแปลงเป็นเวลาหลายชั่วโมง[ 11 ]และแม้แต่มอเตอร์โมเลกุลเดี่ยวก็สามารถถ่ายภาพได้ในขณะที่กำลังเคลื่อนที่
เมื่อใช้งานในโหมดแตะ (tapping mode) เฟสของการสั่นของคานยื่นเทียบกับสัญญาณขับเคลื่อนสามารถบันทึกได้เช่นกัน ช่องสัญญาณนี้มีข้อมูลเกี่ยวกับพลังงานที่คานยื่นสูญเสียไปในแต่ละรอบการสั่น ตัวอย่างที่ประกอบด้วยบริเวณที่มีความแข็งต่างกันหรือมีคุณสมบัติการยึดเกาะที่แตกต่างกันอาจทำให้เกิดความแตกต่างในช่องสัญญาณนี้ซึ่งมองไม่เห็นในภาพภูมิประเทศ อย่างไรก็ตาม การสกัดคุณสมบัติของวัสดุของตัวอย่างในเชิงปริมาณจากภาพเฟส มักทำได้ยาก
โหมดไม่สัมผัส
ใน โหมด กล้องจุลทรรศน์แรงอะตอมแบบไม่สัมผัสปลายของแคนติเลเวอร์จะไม่สัมผัสกับพื้นผิวของตัวอย่าง แต่แคนติเลเวอร์จะสั่นด้วยความถี่เรโซแนนซ์ (การปรับความถี่) หรือสูงกว่าเล็กน้อย (การปรับแอมพลิจูด) โดยแอมพลิจูดของการสั่นโดยทั่วไปจะมีค่าเพียงไม่กี่นาโนเมตร (<10 นาโนเมตร) ไปจนถึงไม่กี่พิโคเมตร[ 14 ] แรง แวนเดอร์วาลส์ซึ่งมีความแรงสูงสุดที่ระยะ 1 นาโนเมตรถึง 10 นาโนเมตรเหนือพื้นผิว หรือแรงระยะไกลอื่นๆ ที่แผ่ขยายเหนือพื้นผิว จะทำให้ความถี่เรโซแนนซ์ของแคนติเลเวอร์ลดลง การลดลงของความถี่เรโซแนนซ์นี้ เมื่อรวมกับระบบลูปป้อนกลับ จะรักษาแอมพลิจูดหรือความถี่ของการสั่นให้คงที่โดยการปรับระยะห่างเฉลี่ยระหว่างปลายกับตัวอย่าง การวัดระยะห่างระหว่างปลายกับตัวอย่างที่จุดข้อมูล (x,y) แต่ละจุด จะทำให้ซอฟต์แวร์การสแกนสร้างภาพภูมิประเทศของพื้นผิวตัวอย่างได้
กล้องจุลทรรศน์แรงอะตอมแบบไม่สัมผัส (Non-contact mode AFM) ไม่ประสบปัญหาการเสื่อมสภาพของปลายหัววัดหรือตัวอย่าง ซึ่งบางครั้งอาจพบได้หลังจากการสแกนหลายครั้งด้วยกล้องจุลทรรศน์แรงอะตอมแบบสัมผัส (Contact AFM) ทำให้กล้องจุลทรรศน์แรงอะตอมแบบไม่สัมผัสเป็นที่นิยมมากกว่าแบบสัมผัสสำหรับการวัดตัวอย่างที่อ่อนนุ่ม เช่น ตัวอย่างทางชีวภาพและฟิล์มบาง อินทรีย์ ในกรณีของตัวอย่างที่แข็ง ภาพที่ได้จากแบบสัมผัสและไม่สัมผัสอาจดูเหมือนกัน อย่างไรก็ตาม หากมี ของเหลว ที่ดูดซับอยู่บนพื้นผิวของตัวอย่างที่แข็งเพียงไม่กี่ชั้น ภาพที่ได้อาจแตกต่างกันอย่างมาก กล้องจุลทรรศน์แรงอะตอมที่ทำงานในโหมดสัมผัสจะแทรกซึมเข้าไปในชั้นของเหลวเพื่อถ่ายภาพพื้นผิวด้านล่าง ในขณะที่ในโหมดไม่สัมผัส กล้องจุลทรรศน์แรงอะตอมจะแกว่งอยู่เหนือชั้นของเหลวที่ดูดซับอยู่เพื่อถ่ายภาพทั้งของเหลวและพื้นผิว
แผนการสำหรับการทำงานในโหมดไดนามิกประกอบด้วยการปรับความถี่โดยใช้ลูปเฟสล็อก เพื่อติดตามความถี่เรโซแนนซ์ของแคนติเลเวอร์ และ การปรับแอมพลิจูด ที่พบได้ทั่วไป โดยใช้ลูปเซอร์โวเพื่อรักษาระดับการกระตุ้นของแคนติเลเวอร์ให้อยู่ในแอมพลิจูดที่กำหนด ในการปรับความถี่ การเปลี่ยนแปลงความถี่การสั่นจะให้ข้อมูลเกี่ยวกับการโต้ตอบระหว่างปลายกับตัวอย่าง ความถี่สามารถวัดได้ด้วยความไวสูงมาก ดังนั้นโหมดการปรับความถี่จึงช่วยให้สามารถใช้แคนติเลเวอร์ที่แข็งมากได้ แคนติเลเวอร์ที่แข็งจะให้ความเสถียรใกล้กับพื้นผิวมาก และด้วยเหตุนี้ เทคนิคนี้จึงเป็นเทคนิค AFM แรกที่ให้ความละเอียดระดับอะตอมที่แท้จริงในสภาวะสุญญากาศสูงมาก[ 15 ]
ในการ มอดู เลชั่นแอมพลิจูด การเปลี่ยนแปลงของแอมพลิจูดหรือเฟสของการสั่นจะให้สัญญาณป้อนกลับสำหรับการสร้างภาพ ในการมอดูเลชั่นแอมพลิจูด การเปลี่ยนแปลงของเฟสของการสั่นสามารถใช้เพื่อแยกแยะวัสดุประเภทต่างๆ บนพื้นผิวได้ การมอดูเลชั่นแอมพลิจูดสามารถทำงานได้ทั้งในโหมดไม่สัมผัสหรือในโหมดสัมผัสแบบไม่ต่อเนื่อง ในโหมดสัมผัสแบบไดนามิก คานยื่นจะสั่นเพื่อให้ระยะห่างระหว่างปลายคานยื่นกับพื้นผิวตัวอย่างเปลี่ยนแปลงไป
การปรับความกว้าง ของคลื่น (Amplitude modulation) ยังถูกนำมาใช้ในระบบที่ไม่ต้องสัมผัส เพื่อสร้างภาพที่มีความละเอียดระดับอะตอม โดยใช้คานยื่นที่แข็งมากและความกว้างของคลื่นขนาดเล็กในสภาพแวดล้อมสุญญากาศสูงมาก
ภาพภูมิประเทศ
การสร้างภาพเป็นวิธีการสร้างกราฟที่สร้างแผนที่สีโดยการเปลี่ยนตำแหน่ง x-y ของปลายหัววัดในขณะที่สแกนและบันทึกตัวแปรที่วัดได้ เช่น ความเข้มของสัญญาณควบคุม ไปยังแต่ละพิกัด x-y แผนที่สีจะแสดงค่าที่วัดได้ซึ่งสอดคล้องกับแต่ละพิกัด ภาพจะแสดงความเข้มของค่าเป็นเฉดสี โดยปกติแล้ว ความสัมพันธ์ระหว่างความเข้มของค่าและเฉดสีจะแสดงเป็นมาตราส่วนสีในคำอธิบายประกอบภาพ
โหมดการทำงานของการสร้างภาพด้วย AFM โดยทั่วไปแบ่งออกเป็นสองกลุ่มตามมุมมองว่าใช้ลูป z-Feedback (ไม่แสดงในภาพ) เพื่อรักษาระยะห่างระหว่างปลายหัววัดกับตัวอย่างเพื่อรักษาระดับความเข้มของสัญญาณที่ส่งออกโดยตัวตรวจจับหรือไม่ กลุ่มแรก (ที่ใช้ลูป z-Feedback) เรียกว่า " โหมด XX คงที่ " ( XXคือสิ่งที่ถูกรักษาไว้โดยลูป z-Feedback)
โหมดการสร้างภาพภูมิประเทศนั้นอิงตาม " โหมด XX คงที่ " ที่กล่าวถึงข้างต้น โดยวงจรป้อนกลับ Z จะควบคุมระยะห่างสัมพัทธ์ระหว่างหัววัดและตัวอย่างผ่านการส่งสัญญาณควบคุมเพื่อรักษาระดับความถี่ การสั่น และเฟสให้คงที่ ซึ่งโดยทั่วไปจะสอดคล้องกับการเคลื่อนที่ของคานยื่น (ตัวอย่างเช่น เมื่อจ่ายแรงดันไฟฟ้าให้กับองค์ประกอบเพียโซอิเล็กทริก Z ตัวอย่างจะเคลื่อนที่ขึ้นและลงไปตามทิศทาง Z)
ภาพภูมิประเทศของ FM-AFM
เมื่อระยะห่างระหว่างหัววัดและตัวอย่างอยู่ในช่วงที่สามารถตรวจจับแรงระดับอะตอมได้ ในขณะที่คานยื่นถูกกระตุ้นด้วยความถี่ธรรมชาติ ( f₀ )ความถี่เรโซแนนซ์fของคานยื่นอาจเปลี่ยนไปจากความถี่เรโซแนนซ์เดิม กล่าวอีกนัยหนึ่ง ในช่วงที่สามารถตรวจจับแรงระดับอะตอมได้ จะสังเกตเห็นการเปลี่ยนแปลงความถี่ ( df = f – f₀ )ด้วย เมื่อระยะห่างระหว่างหัววัดและตัวอย่างอยู่ใน ช่วง ที่ไม่สัมผัสกันการเปลี่ยนแปลงความถี่จะเพิ่มขึ้นในทิศทางลบเมื่อระยะห่างระหว่างหัววัดและตัวอย่างลดลง
เมื่อตัวอย่างมีลักษณะเว้าและนูน ระยะห่างระหว่างปลายหัววัดกับตัวอย่างจะแปรผันตามความเว้าและความนูนที่เกิดขึ้นพร้อมกับการสแกนตัวอย่างไปตามทิศทาง x-y (โดยไม่มีการปรับความสูงในทิศทาง z) ส่งผลให้เกิดการเปลี่ยนแปลงความถี่ขึ้น ภาพที่แสดงค่าความถี่ที่ได้จากการสแกนแบบแรสเตอร์ไปตามทิศทาง x-y ของพื้นผิวตัวอย่างเทียบกับพิกัด x-y ของแต่ละจุดวัด เรียกว่า ภาพความสูงคงที่
ในทางกลับกัน df อาจคงที่ได้โดยการเคลื่อนหัววัดขึ้นและลง (ดู (3) ของรูปที่ 5) ในทิศทาง z โดยใช้การป้อนกลับเชิงลบ (โดยใช้ลูปป้อนกลับ z) ในขณะที่ทำการสแกนพื้นผิวตัวอย่างตามทิศทาง x–y ภาพที่แสดงปริมาณการป้อนกลับเชิงลบ (ระยะการเคลื่อนที่ของหัววัดขึ้นและลงในทิศทาง z) เทียบกับพิกัด x–y ของแต่ละจุดวัดคือภาพภูมิประเทศ กล่าวอีกนัยหนึ่ง ภาพภูมิประเทศคือร่องรอยของปลายหัววัดที่ถูกควบคุมเพื่อให้ df คงที่ และอาจถือได้ว่าเป็นกราฟของพื้นผิวที่มีความสูงคงที่ของ df
ดังนั้น ภาพภูมิประเทศของ AFM จึงไม่ใช่ลักษณะพื้นผิวที่แท้จริง แต่เป็นภาพที่ได้รับอิทธิพลจากลำดับการยึดเหนี่ยวระหว่างหัววัดกับตัวอย่าง อย่างไรก็ตาม ภาพภูมิประเทศของ AFM ถือว่าสะท้อนรูปร่างทางภูมิศาสตร์ของพื้นผิวได้ดีกว่าภาพภูมิประเทศของกล้องจุลทรรศน์แบบสแกนนิงทันเนล
สเปกโทรสโกปีแรง
นอกจากการสร้างภาพแล้ว AFM ยังสามารถใช้สำหรับ การวัด แรงสเปกโทรสโกปี ซึ่งเป็นการวัดแรงปฏิสัมพันธ์ระหว่างปลายหัววัดกับตัวอย่างโดยตรง โดยขึ้นอยู่กับระยะห่างระหว่างปลายหัววัดกับตัวอย่าง ผลลัพธ์ของการวัดนี้เรียกว่าเส้นโค้งแรง-ระยะทาง สำหรับวิธีนี้ ปลายหัววัด AFM จะถูกยืดออกไปและหดกลับจากพื้นผิว โดยจะตรวจสอบการเบี่ยงเบนของคานยื่นตามฟังก์ชันของ การกระจัด แบบเพียโซอิเล็กทริกการวัดเหล่านี้ถูกนำมาใช้ในการวัดการสัมผัสระดับนาโนการยึดเหนี่ยวของอะตอมแรงแวนเดอร์วาลส์และแรงแคสิเมียร์แรงละลายในของเหลว และแรงยืดและแรงแตกของโมเลกุลเดี่ยว[ 16 ] AFM ยังถูกใช้ในการวัดแรงกระจายตัวเนื่องจากพอลิเมอร์ที่ดูดซับอยู่บนพื้นผิวในสภาพแวดล้อมที่เป็นน้ำ[ 17 ] ปัจจุบันสามารถวัด แรงในระดับไม่กี่พิโคนิวตันได้เป็นประจำด้วยความละเอียดระยะทางในแนวตั้งที่ดีกว่า 0.1 นาโนเมตร การวัดแรงสเปกโทรสโกปีสามารถทำได้ทั้งในโหมดคงที่หรือโหมดไดนามิก ในโหมดไดนามิก ข้อมูลเกี่ยวกับการสั่นสะเทือนของคานยื่นจะถูกตรวจสอบเพิ่มเติมจากการโก่งตัวแบบคงที่[ 18 ]
ปัญหาของเทคนิคนี้ได้แก่ การไม่สามารถวัดระยะห่างระหว่างปลายหัววัดกับตัวอย่างได้โดยตรง และความจำเป็นทั่วไปในการใช้คานยื่นที่มีความแข็งต่ำ ซึ่งมักจะ "ดีด" เข้ากับพื้นผิว ปัญหาเหล่านี้ไม่ใช่ปัญหาที่แก้ไขไม่ได้ มีการพัฒนา AFM ที่วัดระยะห่างระหว่างปลายหัววัดกับตัวอย่างได้โดยตรง[ 19 ] การดีดเข้าสามารถลดลงได้โดยการวัดในของเหลวหรือโดยการใช้คานยื่นที่แข็งกว่า แต่ในกรณีหลังนี้จำเป็นต้องใช้เซ็นเซอร์วัดการเบี่ยงเบนที่ไวต่อการเปลี่ยนแปลงมากขึ้น การใช้ การสั่น เล็กน้อยกับปลายหัววัดทำให้สามารถวัดความแข็ง (การไล่ระดับแรง) ของพันธะได้เช่นกัน[ 20 ]
การประยุกต์ใช้ทางชีววิทยาและอื่นๆ
สเปกโทรสโกปีแรงถูกนำมาใช้ในชีวฟิสิกส์เพื่อวัดคุณสมบัติทางกลของวัสดุที่มีชีวิต (เช่น เนื้อเยื่อหรือเซลล์) [ 21 ] [ 22 ] [ 23 ]หรือตรวจจับโครงสร้างที่มีความแข็งต่างกันที่ฝังอยู่ในเนื้อของตัวอย่างโดยใช้โทโมกราฟีความแข็ง[ 24 ]การประยุกต์ใช้อีกอย่างหนึ่งคือการวัดแรงปฏิสัมพันธ์ระหว่างวัสดุที่ติดอยู่บนปลายคานยื่นกับพื้นผิวของอนุภาคที่เป็นอิสระหรือถูกครอบครองโดยวัสดุเดียวกัน จากเส้นโค้งการกระจายแรงยึดเกาะ ได้มีการคำนวณค่าเฉลี่ยของแรง ซึ่งทำให้สามารถสร้างแผนที่ของพื้นผิวของอนุภาคที่ถูกปกคลุมหรือไม่ถูกปกคลุมด้วยวัสดุได้[ 25 ] AFM ยังถูกใช้สำหรับการคลี่โปรตีนทางกล[ 26 ]ในการทดลองดังกล่าว การวิเคราะห์แรงคลี่เฉลี่ยด้วยแบบจำลองที่เหมาะสม[ 27 ]นำไปสู่การได้รับข้อมูลเกี่ยวกับอัตราการคลี่และพารามิเตอร์โปรไฟล์พลังงานอิสระของโปรตีน
การระบุอะตอมแต่ละตัวบนพื้นผิว
AFM สามารถใช้สร้างภาพอะตอมและโครงสร้างบนพื้นผิวที่หลากหลาย อะตอมที่ปลายของหัววัดจะ "รับรู้" อะตอมแต่ละตัวบนพื้นผิวด้านล่างเมื่อเริ่มสร้างพันธะเคมีกับอะตอมแต่ละตัว เนื่องจากปฏิกิริยาเคมีเหล่านี้เปลี่ยนแปลงความถี่การสั่นของหัววัดอย่างละเอียด จึงสามารถตรวจจับและสร้างแผนที่ได้ หลักการนี้ถูกนำมาใช้เพื่อแยกแยะอะตอมของซิลิคอน ดีบุก และตะกั่วบนพื้นผิวโลหะผสม โดยการเปรียบเทียบรอยนิ้วมืออะตอมเหล่านี้กับค่าที่ได้จาก การจำลอง ทฤษฎีฟังก์ชันความหนาแน่น (DFT) [ 28 ]
แรงปฏิสัมพันธ์จะต้องได้รับการวัดอย่างแม่นยำสำหรับอะตอมแต่ละประเภทที่คาดว่าจะพบในตัวอย่าง จากนั้นจึงนำไปเปรียบเทียบกับแรงที่ได้จากการจำลอง DFT พบว่าปลายมีปฏิสัมพันธ์กับอะตอมซิลิคอนอย่างรุนแรงที่สุด และมีปฏิสัมพันธ์กับอะตอมดีบุกและตะกั่วลดลง 24% และ 41% ตามลำดับ สามารถระบุอะตอมแต่ละประเภทที่แตกต่างกันในเมทริกซ์ได้โดยใช้ข้อมูลนี้[ 28 ]
โพรบ
หัววัด AFM มีปลายแหลมอยู่ที่ปลายคานยื่นที่แกว่งได้อย่างอิสระซึ่งยื่นออกมาจากตัวยึด[ 29 ]ขนาดของคานยื่นอยู่ในระดับไมโครเมตร รัศมีของปลายมักจะอยู่ในระดับไม่กี่นาโนเมตรถึงไม่กี่สิบนาโนเมตร (มีหัววัดแบบพิเศษที่มีรัศมีปลายที่ใหญ่กว่ามาก เช่น หัววัดสำหรับการกดวัสดุที่อ่อนนุ่ม) ตัวยึดคานยื่น หรือที่เรียกว่าชิปตัวยึด—มักมีขนาด 1.6 มม. x 3.4 มม.—ช่วยให้ผู้ใช้งานสามารถจับชุดคานยื่น/หัววัด AFM ด้วยแหนบและใส่เข้าไปในคลิปยึดที่เกี่ยวข้องบนหัวสแกนของกล้องจุลทรรศน์แรงอะตอม
อุปกรณ์นี้โดยทั่วไปเรียกว่า "หัววัด AFM" แต่ก็มีชื่อเรียกอื่นๆ เช่น "ปลายหัววัด AFM" และ "คานยื่น" (โดยใช้ชื่อของส่วนประกอบชิ้นเดียวเป็นชื่อเรียกของอุปกรณ์ทั้งหมด) หัววัด AFM เป็นหัววัด SPM ประเภทหนึ่งโดยเฉพาะ
หัววัด AFM ผลิตขึ้นด้วยเทคโนโลยี MEMSหัววัด AFM ส่วนใหญ่ทำจากซิลิคอน (Si) แต่ ก็มีการใช้ แก้วบอโรซิลิเกตและซิลิคอนไนไตรด์ด้วยหัววัด AFM ถือเป็นวัสดุสิ้นเปลือง เนื่องจากมักจะต้องเปลี่ยนเมื่อปลายหัววัดทื่อหรือปนเปื้อน หรือเมื่อคานยื่นหัก ราคาหัววัดอาจมีตั้งแต่ไม่กี่สิบดอลลาร์ไปจนถึงหลายร้อยดอลลาร์ต่อคานยื่นสำหรับชุดคานยื่น/หัววัดที่เฉพาะเจาะจงที่สุด
ในการใช้งานอุปกรณ์นี้ ปลายหัววัดจะถูกนำไปใกล้กับพื้นผิวของวัตถุที่ต้องการตรวจสอบ และคานยื่นจะเบี่ยงเบนไปเนื่องจากการปฏิสัมพันธ์ระหว่างปลายหัววัดกับพื้นผิว ซึ่งเป็นสิ่งที่เครื่อง AFM ถูกออกแบบมาเพื่อวัด สามารถสร้างแผนที่แสดงการปฏิสัมพันธ์ได้โดยการวัดการเบี่ยงเบนที่หลายจุดบนพื้นผิวสองมิติ
สามารถตรวจจับปฏิสัมพันธ์ได้หลายประเภท ขึ้นอยู่กับปฏิสัมพันธ์ที่กำลังตรวจสอบ พื้นผิวของปลายหัววัด AFM จำเป็นต้องได้รับการดัดแปลงด้วยการเคลือบ การเคลือบที่ใช้ ได้แก่ทองคำ – สำหรับพันธะโควาเลนต์ของโมเลกุลทางชีวภาพและการตรวจจับปฏิสัมพันธ์กับพื้นผิว[ 30 ]เพชรเพื่อเพิ่มความต้านทานการสึกหรอ[ 31 ]และการเคลือบแม่เหล็กสำหรับการตรวจจับคุณสมบัติแม่เหล็กของพื้นผิวที่กำลังตรวจสอบ[ 32 ]มีวิธีแก้ปัญหาอีกวิธีหนึ่งเพื่อให้ได้ภาพแม่เหล็กที่มีความละเอียดสูง คือ การติดตั้ง ไมโครสควิด (microSQUID ) ไว้ที่หัววัด ปลายหัววัด AFM ผลิตขึ้นโดยใช้การตัดเฉือนไมโครซิลิคอน และการวางตำแหน่งที่แม่นยำของลูปไมโครสควิดทำได้โดยใช้ลิโทกราฟีลำแสงอิเล็กตรอน[ 33 ]การติดควอนตัมดอทเพิ่มเติมที่ปลายหัววัดนำไฟฟ้าทำให้สามารถสร้างภาพศักย์พื้นผิวด้วยความละเอียดด้านข้างสูง การสแกน กล้องจุลทรรศน์ควอนตัมดอท[ 34 ]
พื้นผิวของคานยื่นสามารถปรับเปลี่ยนได้เช่นกัน โดยส่วนใหญ่แล้วจะใช้สารเคลือบเพื่อเพิ่มการสะท้อนแสงของคานยื่นและปรับปรุงสัญญาณการเบี่ยงเบน
แรงที่กระทำขึ้นอยู่กับรูปทรงของปลายหัววัด
แรงระหว่างปลายหัววัดและตัวอย่างขึ้นอยู่กับรูปทรงเรขาคณิตของปลายหัววัดเป็นอย่างมาก ในช่วงหลายปีที่ผ่านมามีการศึกษาค้นคว้ามากมายเพื่อเขียนความสัมพันธ์ระหว่างแรงกับพารามิเตอร์ของปลายหัววัด
ในบรรดาแรงต่างๆ ที่กระทำระหว่างปลายหัววัดกับตัวอย่าง แรงจากผิวสัมผัสของน้ำนั้นมีความน่าสนใจเป็นอย่างยิ่ง ทั้งในสภาพแวดล้อมที่เป็นอากาศและของเหลว นอกจากนี้ยังต้องพิจารณาแรงอื่นๆ ด้วย เช่นแรงคูลอมบ์แรงแวนเดอร์วาลส์ปฏิสัมพันธ์ระหว่างชั้นคู่ แรงจากการละลายแรงจากการไฮเดรชั่น และแรงจากคุณสมบัติไม่ชอบน้ำ
เมนิสคัสน้ำ
แรงเมนิสคัสของน้ำมีความน่าสนใจอย่างยิ่งสำหรับการวัดด้วยกล้องจุลทรรศน์แรงอะตอม (AFM) ในอากาศ เนื่องจากความชื้น ในอากาศ ทำให้เกิดชั้นน้ำบางๆ ระหว่างปลายหัววัดและตัวอย่างในระหว่างการวัดในอากาศ แรงดึงดูดของเหลวที่เกิดขึ้นจะก่อให้เกิดแรงดึงดูดที่แข็งแกร่งซึ่งดึงปลายหัววัดเข้ากับพื้นผิว อันที่จริง แรงยึดเกาะที่วัดได้ระหว่างปลายหัววัดและตัวอย่างในอากาศที่มีความชื้นจำกัด มักจะถูกครอบงำด้วยแรงดึงดูดของเหลว ดังนั้นจึงเป็นการยากที่จะดึงปลายหัววัดออกจากพื้นผิว สำหรับตัวอย่างที่อ่อนนุ่ม รวมถึงพอลิเมอร์หลายชนิด และโดยเฉพาะอย่างยิ่งวัสดุชีวภาพ แรงดึงดูดของเหลวที่แข็งแกร่งจะนำไปสู่การเสื่อมสภาพและการทำลายตัวอย่างเมื่อทำการถ่ายภาพในโหมดสัมผัส ในอดีต ปัญหาเหล่านี้เป็นแรงผลักดันที่สำคัญสำหรับการพัฒนาการถ่ายภาพแบบไดนามิกในอากาศ (เช่น "โหมดแตะ") ในระหว่างการถ่ายภาพในโหมดแตะในอากาศ สะพานของเหลวยังคงก่อตัวขึ้น อย่างไรก็ตาม สำหรับเงื่อนไขการถ่ายภาพที่เหมาะสม สะพานของเหลวจะก่อตัวและแตกออกในทุกรอบการแกว่งของคานยื่นที่ตั้งฉากกับพื้นผิว ดังที่สามารถอนุมานได้จากการวิเคราะห์เส้นโค้งแอมพลิจูดและเฟสของคานยื่นเทียบกับระยะทาง[ 35 ]ผลที่ตามมาคือ แรงเฉือนทำลายล้างจะลดลงอย่างมาก และสามารถตรวจสอบตัวอย่างที่อ่อนนุ่มได้
เพื่อหาปริมาณแรงตึงผิวสมดุล จำเป็นต้องเริ่มต้นจากสมการลาปลาสสำหรับความดัน:


โดยที่γ Lคือพลังงานพื้นผิวและr 0และr 1ถูกกำหนดไว้ในรูปภาพ
แรงกดถูกกระทำบนพื้นที่ของ
![{\displaystyle A\simeq 2\pi R\simeq [r_{eff}(1+\cos \theta )+h]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bdaec618f9921eea6a1fd6236e73ab4a6760bf83)
โดยที่θคือมุมระหว่างพื้นผิวของปลายเข็มกับพื้นผิวของของเหลว และ hคือความแตกต่างของระดับความสูงระหว่างของเหลวโดยรอบกับส่วนบนสุดของเข็มขนาดเล็ก
แรงที่ดึงพื้นผิวทั้งสองเข้าหากันคือ

สูตรเดียวกันนี้สามารถคำนวณได้โดยพิจารณาจากความชื้นสัมพัทธ์ด้วยเช่นกัน
Gao [ 36 ]คำนวณสูตรสำหรับรูปทรงปลายที่แตกต่างกัน ตัวอย่างเช่น แรงจะลดลง 20% สำหรับปลายทรงกรวยเมื่อเทียบกับปลายทรงกลม
เมื่อคำนวณแรงเหล่านี้ จะต้องแยกความแตกต่างระหว่างสถานการณ์เปียกบนแห้งและสถานการณ์เปียกบนเปียก
สำหรับปลายทรงกลม แรงที่กระทำคือ:
- สำหรับพื้นผิวแห้งบนพื้นผิวเปียก

- สำหรับพื้นผิวเปียกบนพื้นผิวเปียก

โดยที่θคือมุมสัมผัสของทรงกลมแห้ง และφคือมุมจุ่ม ดังแสดงในรูป
สำหรับหัวปากกาแบบทรงกรวย สูตรจะเป็นดังนี้:
- สำหรับแห้งบนเปียก

- สำหรับเปียกบนเปียก

โดยที่δคือมุมครึ่งกรวย และr 0และhคือพารามิเตอร์ของรูปทรงเมนิสคัส
การวัดการเบี่ยงเบนของคานยื่น AFM
การวัดการเบี่ยงเบนของลำแสง

วิธีการวัดการเบี่ยงเบนของคานยื่นที่พบได้บ่อยที่สุดคือ วิธีการเบี่ยงเบนลำแสง ในวิธีนี้ แสงเลเซอร์จากไดโอดโซลิดสเตทจะสะท้อนจากด้านหลังของคานยื่นและถูกรวบรวมโดยตัวตรวจจับที่ไวต่อตำแหน่ง (PSD) ซึ่งประกอบด้วยโฟโตไดโอด สองตัวที่อยู่ใกล้กัน โดยสัญญาณเอาต์พุตจะถูกรวบรวมโดย ตัวขยายสัญญาณ แบบดิฟเฟอเรนเชียลการ เคลื่อนที่เชิงมุมของคานยื่นส่งผลให้โฟโตไดโอดตัวหนึ่งรวบรวมแสงได้มากกว่าอีกตัวหนึ่ง ทำให้เกิดสัญญาณเอาต์พุต (ความแตกต่างระหว่างสัญญาณของโฟโตไดโอดที่หารด้วยผลรวม) ซึ่งเป็นสัดส่วนกับการเบี่ยงเบนของคานยื่น ความไวของวิธีการเบี่ยงเบนลำแสงนั้นสูงมาก และสามารถได้ระดับสัญญาณรบกวนในระดับ 10 fm Hz − 1 ⁄ 2ได้อย่างสม่ำเสมอในระบบที่ออกแบบมาอย่างดี แม้ว่าบางครั้งวิธีนี้จะถูกเรียกว่าวิธี "คานแสง" แต่สัญญาณจะไม่ถูกขยายหากเส้นทางของลำแสงยาวขึ้น เส้นทางลำแสงที่ยาวขึ้นจะเพิ่มการเคลื่อนที่ของจุดสะท้อนบนโฟโตไดโอด แต่ยังทำให้จุดนั้นกว้างขึ้นในปริมาณเท่ากันเนื่องจากการเลี้ยวเบนดังนั้นพลังงานแสงจึงเคลื่อนที่จากโฟโตไดโอดหนึ่งไปยังอีกโฟโตไดโอดหนึ่งในปริมาณเท่าเดิม "แรงงัดทางแสง" (สัญญาณเอาต์พุตของตัวตรวจจับหารด้วยการเบี่ยงเบนของคานยื่น) จะแปรผกผันกับรูรับแสงเชิงตัวเลขของเลนส์โฟกัสลำแสง ตราบใดที่จุดเลเซอร์ที่โฟกัสมีขนาดเล็กพอที่จะตกกระทบคานยื่นได้อย่างสมบูรณ์ นอกจากนี้ยังแปรผกผันกับความยาวของคานยื่นด้วย
ความนิยมของวิธีการเบี่ยงเบนลำแสงนั้นสามารถอธิบายได้จากความไวสูงและการใช้งานที่ง่าย รวมถึงข้อเท็จจริงที่ว่าคานยื่นไม่จำเป็นต้องมีหน้าสัมผัสทางไฟฟ้าหรือการจัดการพิเศษอื่น ๆ ดังนั้นจึงสามารถผลิตได้ในราคาที่ค่อนข้างถูกด้วยปลายแหลมที่รวมอยู่ในตัว
วิธีการวัดการเบี่ยงเบนอื่นๆ
ยังมีวิธีการวัดการเบี่ยงเบนของลำแสงอีกหลายวิธี
- การตรวจจับแบบเพียโซอิเล็กทริก – คานยื่นที่ทำจากควอตซ์[ 37 ] (เช่น การกำหนดค่า qPlus ) หรือ วัสดุ เพียโซอิเล็กทริก อื่นๆ สามารถตรวจจับการเบี่ยงเบนเป็นสัญญาณไฟฟ้าได้โดยตรง ด้วยวิธีนี้สามารถตรวจจับการสั่นของคานยื่นได้ถึง 10 pm
- การวัดการสั่นสะเทือนด้วยเลเซอร์ดอปเปลอร์ – เครื่อง วัดการสั่นสะเทือนด้วยเลเซอร์ดอปเปลอร์สามารถใช้ในการวัดการเบี่ยงเบนที่แม่นยำมากสำหรับคานยื่นที่สั่น[ 38 ] (ดังนั้นจึงใช้เฉพาะในโหมดไม่สัมผัส) วิธีนี้มีราคาแพงและมีเพียงไม่กี่กลุ่มเท่านั้นที่ใช้
- กล้องจุลทรรศน์แบบสแกนอุโมงค์ (STM) — กล้องจุลทรรศน์อะตอมตัวแรกใช้ STM ที่มีกลไกป้อนกลับของตัวเองเพื่อวัดการเบี่ยงเบน [ 8 ]วิธีนี้ยากต่อการนำไปใช้ และตอบสนองต่อการเปลี่ยนแปลงการเบี่ยงเบนได้ช้าเมื่อเทียบกับวิธีการสมัยใหม่
- การแทรกสอดเชิงแสง – การแทรกสอดเชิงแสงสามารถใช้ในการวัดการเบี่ยงเบนของคานยื่นได้[ 39 ]เนื่องจากการเบี่ยงเบนในระดับนาโนเมตรที่วัดได้ใน AFM ทำให้เครื่องวัดการแทรกสอดทำงานในระบอบย่อยของแถบ ดังนั้นการเปลี่ยนแปลงใดๆ ในกำลังเลเซอร์หรือความยาวคลื่นจึงส่งผลกระทบอย่างมากต่อการวัด ด้วยเหตุผลเหล่านี้ การวัดด้วยเครื่องวัดการแทรกสอดเชิงแสงจึงต้องทำด้วยความระมัดระวังอย่างยิ่ง (เช่น การใช้ ของเหลว ที่ตรงกับดัชนีระหว่างจุดเชื่อมต่อใยแก้วนำแสง) โดยใช้เลเซอร์ที่มีความเสถียรสูง ด้วยเหตุผลเหล่านี้ การแทรกสอดเชิงแสงจึงไม่ค่อยได้ใช้
- การตรวจจับแบบคาปาซิทีฟ – คานยื่นเคลือบโลหะสามารถสร้างตัวเก็บประจุ ได้ โดยมีหน้าสัมผัสอีกอันอยู่ด้านหลังคานยื่น[ 40 ]การเบี่ยงเบนจะเปลี่ยนระยะห่างระหว่างหน้าสัมผัสและสามารถวัดได้เป็นการเปลี่ยนแปลงของค่าความจุ
- การตรวจจับแบบเพียโซเรซิสทีฟ – คานยื่นสามารถสร้างขึ้นด้วยองค์ประกอบเพียโซเรซิสทีฟที่ทำหน้าที่เป็นเกจวัดความเครียดการใช้บริดจ์วีทสโตนสามารถวัดความเครียดในคานยื่น AFM เนื่องจากการเบี่ยงเบนได้[ 41 ]วิธีนี้ไม่ค่อยได้ใช้ในงานสุญญากาศ เนื่องจากการตรวจจับแบบเพียโซเรซิสทีฟจะกระจายพลังงานจากระบบ ส่งผลต่อค่าQของเรโซแนนซ์
เครื่องสแกนแบบเพียโซอิเล็กทริก
สแกนเนอร์ AFM ทำจาก วัสดุ เพียโซอิเล็กทริกซึ่งจะขยายและหดตัวตามสัดส่วนของแรงดันไฟฟ้าที่ใช้ การยืดหรือหดตัวขึ้นอยู่กับขั้วของแรงดันไฟฟ้าที่ใช้ ตามธรรมเนียมแล้ว ปลายหรือตัวอย่างจะถูกติดตั้งบน "ขาตั้งสามขา" ที่ประกอบด้วยผลึกเพียโซสามชิ้น โดยแต่ละชิ้นทำหน้าที่สแกนในทิศทางx , yและz [ 8 ]ในปี 1986 ซึ่งเป็นปีเดียวกับที่คิดค้น AFM สแกนเนอร์ เพียโซอิเล็กทริก แบบใหม่ คือ สแกนเนอร์แบบท่อ ได้รับการพัฒนาขึ้นเพื่อใช้ใน STM [ 42 ]ต่อมาสแกนเนอร์แบบท่อได้ถูกรวมเข้ากับ AFM สแกนเนอร์แบบท่อสามารถเคลื่อนย้ายตัวอย่างใน ทิศทาง x , yและzโดยใช้เพียโซแบบท่อเดี่ยวที่มีหน้าสัมผัสภายในหนึ่งจุดและหน้าสัมผัสภายนอกสี่จุด ข้อดีของสแกนเนอร์แบบท่อเมื่อเทียบกับการออกแบบขาตั้งสามขาแบบดั้งเดิม คือ การแยกการสั่นสะเทือนที่ดีกว่า ซึ่งเป็นผลมาจากความถี่เรโซแนนซ์ที่สูงกว่าของโครงสร้างองค์ประกอบเดี่ยว ร่วมกับขั้นตอนการแยกความถี่เรโซแนนซ์ต่ำ ข้อเสียอย่างหนึ่งคือ การเคลื่อนที่ในแกน xและyอาจทำให้เกิด การเคลื่อนที่ในแกน z ที่ไม่ต้องการ ส่งผลให้เกิดการบิดเบี้ยว อีกหนึ่งการออกแบบที่นิยมสำหรับเครื่องสแกน AFM คือ สเตจแบบ ยืดหยุ่น (flexure stage) ซึ่งใช้ตัวขับเพียโซแยกกันสำหรับแต่ละแกน และเชื่อมต่อเข้าด้วยกันผ่านกลไกแบบยืดหยุ่น
สแกนเนอร์มีลักษณะเฉพาะด้วยความไว ซึ่งเป็นอัตราส่วนของการเคลื่อนที่ของเพียโซต่อแรงดันไฟฟ้าของเพียโซ กล่าวคือ วัสดุเพียโซจะยืดหรือหดตัวมากน้อยเพียงใดต่อแรงดันไฟฟ้าที่ใช้ เนื่องจากความแตกต่างของวัสดุหรือขนาด ความไวจึงแตกต่างกันไปในแต่ละสแกนเนอร์ ความไวจะแปรผันแบบไม่เป็นเชิงเส้นกับขนาดของการสแกน สแกนเนอร์เพียโซแสดงความไวมากกว่าที่ส่วนท้ายมากกว่าที่ส่วนต้นของการสแกน ซึ่งทำให้การสแกนไปข้างหน้าและย้อนกลับมีพฤติกรรมที่แตกต่างกันและแสดงฮิสเทอรีซิสระหว่างทิศทางการสแกนทั้งสอง[ 43 ]สามารถแก้ไขได้โดยการใช้แรงดันไฟฟ้าแบบไม่เป็นเชิงเส้นกับอิเล็กโทรดเพียโซเพื่อให้เกิดการเคลื่อนที่เชิงเส้นของสแกนเนอร์และปรับเทียบสแกนเนอร์ตามนั้น[ 43 ]ข้อเสียอย่างหนึ่งของวิธีนี้คือต้องทำการปรับเทียบใหม่ เนื่องจากแรงดันไฟฟ้าแบบไม่เป็นเชิงเส้นที่แม่นยำที่จำเป็นในการแก้ไขการเคลื่อนที่แบบไม่เป็นเชิงเส้นจะเปลี่ยนแปลงไปตามอายุของเพียโซ (ดูด้านล่าง) ปัญหานี้สามารถหลีกเลี่ยงได้โดยการเพิ่มเซ็นเซอร์เชิงเส้นลงในแท่นวางตัวอย่างหรือแท่นวางเพียโซเพื่อตรวจจับการเคลื่อนที่ที่แท้จริงของเพียโซ เซ็นเซอร์สามารถตรวจจับความเบี่ยงเบนจากการเคลื่อนที่ในอุดมคติได้ และจะทำการแก้ไขสัญญาณขับเคลื่อนเพียโซเพื่อแก้ไขการเคลื่อนที่แบบไม่เป็นเชิงเส้นของเพียโซ การออกแบบนี้เรียกว่า AFM แบบ "วงปิด" ส่วน AFM แบบเพียโซที่ไม่มีเซ็นเซอร์เรียกว่า AFM แบบ "วงเปิด"
ความไวของวัสดุเพียโซอิเล็กทริกจะลดลงแบบเอกซ์โพเนนเชียลเมื่อเวลาผ่านไป ซึ่งทำให้การเปลี่ยนแปลงความไวส่วนใหญ่เกิดขึ้นในระยะเริ่มต้นของอายุการใช้งานของเครื่องสแกน เครื่องสแกนเพียโซอิเล็กทริกจะทำงานประมาณ 48 ชั่วโมงก่อนที่จะจัดส่งจากโรงงาน เพื่อให้ผ่านพ้นช่วงเวลาที่อาจมีการเปลี่ยนแปลงความไวมากไปแล้ว เมื่อเครื่องสแกนมีอายุมากขึ้น ความไวจะเปลี่ยนแปลงน้อยลงเมื่อเวลาผ่านไป และเครื่องสแกนแทบจะไม่ต้องทำการปรับเทียบใหม่[ 44 ] [ 45 ]แม้ว่าคู่มือของผู้ผลิตหลายรายจะแนะนำให้ทำการปรับเทียบ AFM แบบวงเปิดทุกเดือนหรือทุกสองเดือนก็ตาม
ข้อดีและข้อเสีย

ข้อดี
AFM มีข้อดีหลายประการเหนือกว่ากล้องจุลทรรศน์อิเล็กตรอนแบบสแกน (SEM) ต่างจากกล้องจุลทรรศน์อิเล็กตรอนที่ให้ภาพฉายสองมิติหรือภาพสองมิติของตัวอย่าง AFM ให้ภาพพื้นผิวสามมิติ นอกจากนี้ ตัวอย่างที่ตรวจสอบด้วย AFM ไม่จำเป็นต้องได้รับการบำบัดพิเศษใดๆ (เช่น การเคลือบโลหะ/คาร์บอน) ที่จะเปลี่ยนแปลงหรือทำลายตัวอย่างอย่างถาวร และโดยทั่วไปจะไม่เกิดสิ่งแปลกปลอมจากการประจุไฟฟ้าในภาพสุดท้าย ในขณะที่กล้องจุลทรรศน์อิเล็กตรอนต้องการ สภาพแวดล้อม สุญญากาศ ที่มีราคาแพง สำหรับการทำงานที่เหมาะสม โหมด AFM ส่วนใหญ่สามารถทำงานได้อย่างสมบูรณ์ในอากาศแวดล้อมหรือแม้แต่ในสภาพแวดล้อมที่เป็นของเหลว ทำให้สามารถศึกษาโมเลกุลชีวภาพขนาดใหญ่และแม้แต่สิ่งมีชีวิตได้ โดยหลักการแล้ว AFM สามารถให้ความละเอียดสูงกว่า SEM มีการแสดงให้เห็นแล้วว่าให้ความละเอียดระดับอะตอมที่แท้จริงในสุญญากาศสูงยิ่งยวด (UHV) และเมื่อไม่นานมานี้ในสภาพแวดล้อมที่เป็นของเหลว AFM ที่มีความละเอียดสูงของ AFM เทียบได้กับความละเอียดของกล้องจุลทรรศน์แบบสแกนอุโมงค์และกล้องจุลทรรศน์อิเล็กตรอนแบบส่งผ่าน นอกจากนี้ AFM ยังสามารถรวมเข้ากับเทคนิคกล้องจุลทรรศน์และสเปกโทรสโกปีเชิงแสงต่างๆ เช่น กล้องจุลทรรศน์เรืองแสงหรือสเปกโทรสโกปีอินฟราเรด ทำให้เกิดกล้องจุลทรรศน์เชิงแสงแบบสแกนใกล้สนามนาโน-FTIRและขยายขอบเขตการใช้งานให้กว้างขึ้น เครื่องมือ AFM-เชิงแสงแบบผสมผสานถูกนำไปใช้ในวิทยาศาสตร์ชีวภาพเป็นหลัก แต่เมื่อเร็วๆ นี้ได้รับความสนใจอย่างมากในด้านเซลล์แสงอาทิตย์[ 13 ]และการวิจัยการจัดเก็บพลังงาน[ 46 ]วิทยาศาสตร์พอลิเมอร์[ 47 ]นาโนเทคโนโลยี[ 48 ] [ 49 ]และแม้กระทั่งการวิจัยทางการแพทย์[ 50 ]
ข้อเสีย
ข้อเสียเปรียบของ AFM เมื่อเทียบกับกล้องจุลทรรศน์อิเล็กตรอนแบบสแกน (SEM) คือขนาดภาพต่อการสแกนหนึ่งครั้ง ในการสแกนครั้งเดียว SEM สามารถถ่ายภาพพื้นที่ขนาดประมาณตารางมิลลิเมตรด้วยความชัดลึกระดับมิลลิเมตร ในขณะที่ AFM สามารถถ่ายภาพพื้นที่สแกนสูงสุดได้เพียงประมาณ 150×150 ไมโครเมตร และความสูงสูงสุดประมาณ 10–20 ไมโครเมตร วิธีหนึ่งในการปรับปรุงขนาดพื้นที่สแกนสำหรับ AFM คือการใช้โพรบแบบขนานในลักษณะคล้ายกับการจัดเก็บข้อมูลแบบตะขาบ
ความเร็วในการสแกนของ AFM ก็เป็นข้อจำกัดเช่นกัน โดยทั่วไปแล้ว AFM ไม่สามารถสแกนภาพได้เร็วเท่า SEM ซึ่งต้องใช้เวลาหลายนาทีสำหรับการสแกนทั่วไป ในขณะที่ SEM สามารถสแกนได้เกือบเรียลไทม์ แม้ว่าคุณภาพจะค่อนข้างต่ำก็ตาม อัตราการสแกนที่ค่อนข้างช้าในระหว่างการสร้างภาพด้วย AFM มักนำไปสู่การเลื่อนของภาพเนื่องจากความร้อน[ 51 ] [ 52 ] [ 53 ]ทำให้ AFM ไม่เหมาะสำหรับการวัดระยะทางที่แม่นยำระหว่างคุณลักษณะทางภูมิประเทศบนภาพ อย่างไรก็ตาม มีการออกแบบที่ทำงานเร็วหลายแบบ[ 54 ] [ 55 ]ที่ได้รับการแนะนำเพื่อเพิ่มประสิทธิภาพการสแกนของกล้องจุลทรรศน์ รวมถึงสิ่งที่เรียกว่า videoAFM (ได้ภาพที่มีคุณภาพพอสมควรด้วย videoAFM ที่อัตราวิดีโอ: เร็วกว่า SEM โดยเฉลี่ย) เพื่อกำจัดความผิดเพี้ยนของภาพที่เกิดจากการเปลี่ยนแปลงของภาพเนื่องจากความร้อน ได้มีการนำวิธีการต่างๆ มาใช้[ 51 ] [ 52 ] [ 53 ]


ภาพ AFM อาจได้รับผลกระทบจากความไม่เป็นเชิงเส้นฮิสเทอรีซิส [ 43 ] และการคืบของวัสดุเพียโซอิเล็กทริก รวมถึงการรบกวนระหว่าง แกน x , y , zซึ่งอาจต้องใช้ซอฟต์แวร์ในการปรับปรุงและกรอง การกรองดังกล่าวอาจทำให้ลักษณะทางภูมิประเทศที่แท้จริง "ราบเรียบ" อย่างไรก็ตาม AFM รุ่นใหม่ใช้ซอฟต์แวร์แก้ไขแบบเรียลไทม์ (เช่นการสแกนแบบเน้นคุณลักษณะ[ 44 ] [ 51 ] ) หรือสแกนเนอร์แบบวงปิด ซึ่งช่วยขจัดปัญหาเหล่านี้ได้อย่างแท้จริง AFM บางรุ่นยังใช้สแกนเนอร์แบบตั้งฉากแยกกัน (ตรงข้ามกับท่อเดียว) ซึ่งช่วยขจัดปัญหาการรบกวนบางส่วนได้เช่นกัน
เช่นเดียวกับเทคนิคการถ่ายภาพอื่นๆ มีความเป็นไปได้ที่จะเกิดสิ่งผิดปกติในภาพซึ่งอาจเกิดจากหัววัดที่ไม่เหมาะสม สภาพแวดล้อมการทำงานที่ไม่ดี หรือแม้แต่ตัวอย่างเอง ดังแสดงในภาพด้านขวา สิ่งผิดปกติในภาพเหล่านี้เป็นสิ่งที่หลีกเลี่ยงไม่ได้ อย่างไรก็ตาม การเกิดขึ้นและผลกระทบต่อผลลัพธ์สามารถลดลงได้ด้วยวิธีการต่างๆ สิ่งผิดปกติที่เกิดจากหัววัดที่หยาบเกินไปอาจเกิดจากตัวอย่างเช่น การจัดการที่ไม่เหมาะสม หรือการชนกับตัวอย่างโดยไม่ได้ตั้งใจ เช่น การสแกนเร็วเกินไป หรือพื้นผิวที่หยาบเกินไป ทำให้หัววัดสึกหรอ
เนื่องจากลักษณะเฉพาะของหัววัด AFM โดยทั่วไปแล้วจะไม่สามารถวัดผนังที่ลาดชันหรือส่วนที่ยื่นออกมาได้ จึงจำเป็นต้องใช้คานยื่นและเครื่อง AFM ที่ผลิตขึ้นเป็นพิเศษเพื่อปรับการเคลื่อนที่ของหัววัดไปด้านข้าง รวมถึงขึ้นและลง (เช่นเดียวกับโหมดสัมผัสแบบไดนามิกและแบบไม่สัมผัส) เพื่อวัดผนังด้านข้าง แต่ข้อเสียคือคานยื่นจะมีราคาแพงกว่า ความละเอียดด้านข้างต่ำกว่า และมีสิ่งรบกวนเพิ่มเติม
การประยุกต์ใช้ในด้านอื่นๆ ในสาขาวิชาต่างๆ

ความพยายามล่าสุดในการบูรณาการนาโนเทคโนโลยีและการวิจัยทางชีววิทยาประสบความสำเร็จและมีแนวโน้มที่ดีในอนาคต รวมถึงในสาขาต่างๆ เช่นนาโนชีวกลศาสตร์ [ 56 ] เนื่องจากอนุภาคนาโนเป็นพาหะที่มีศักยภาพในการนำส่งยา การตอบสนองทางชีววิทยาของเซลล์ต่ออนุภาคนาโนเหล่านี้จึงได้รับการสำรวจอย่างต่อเนื่องเพื่อเพิ่มประสิทธิภาพและวิธีการปรับปรุงการออกแบบ[ 57 ] Pyrgiotakis และคณะสามารถศึกษาปฏิสัมพันธ์ระหว่างอนุภาคนาโน CeO 2และ Fe 2 O 3 ที่ได้รับการ ออกแบบและเซลล์โดยการติดอนุภาคนาโนที่ได้รับการออกแบบเข้ากับปลาย AFM [ 58 ]การศึกษาต่างๆ ได้ใช้ประโยชน์จาก AFM เพื่อให้ได้ข้อมูลเพิ่มเติมเกี่ยวกับพฤติกรรมของเซลล์ที่มีชีวิตในสื่อชีวภาพ สเปกโทรสโกปีแรงอะตอมแบบเรียลไทม์ (หรือนาโนสโคปี) และสเปกโทรสโกปีแรงอะตอมแบบไดนามิกถูกนำมาใช้เพื่อศึกษาเซลล์ที่มีชีวิตและโปรตีนเยื่อหุ้มเซลล์และพฤติกรรมไดนามิกของพวกมันที่ความละเอียดสูงในระดับนาโน การถ่ายภาพและการได้รับข้อมูลเกี่ยวกับลักษณะทางภูมิศาสตร์และคุณสมบัติของเซลล์ยังให้ข้อมูลเชิงลึกเกี่ยวกับกระบวนการทางเคมีและกลไกที่เกิดขึ้นผ่านปฏิสัมพันธ์ระหว่างเซลล์และปฏิสัมพันธ์กับโมเลกุลส่งสัญญาณอื่นๆ (เช่น ลิแกนด์) อีแวนส์และแคลเดอร์วูดใช้กล้องจุลทรรศน์แรงระดับเซลล์เดี่ยวเพื่อศึกษา แรงยึด เกาะของเซลล์จลนศาสตร์ของพันธะ/ความแข็งแรงของพันธะแบบไดนามิก และบทบาทของมันในกระบวนการทางเคมี เช่น การส่งสัญญาณของเซลล์[ 59 ] เชอริง เลวี และริโกด์ ได้ทบทวนการศึกษาที่ใช้ AFM เพื่อสำรวจโครงสร้างผลึกของโปรตีนเยื่อหุ้มเซลล์ของแบคทีเรียสังเคราะห์แสง[ 60 ] อัลสตีนและคณะได้ใช้กล้องจุลทรรศน์นาโนแบบ AFM เพื่อทำการวิเคราะห์แบบเรียลไทม์ของปฏิสัมพันธ์ระหว่างไมโคแบคทีเรีย ที่มีชีวิต กับยาต้านไมโคแบคทีเรีย (โดยเฉพาะไอโซไนอาซิด เอทิโอนาไมด์ เอทัมบูโทลและสเตรปโตไมซิน ) [ 61 ]ซึ่งเป็นตัวอย่างของการวิเคราะห์เชิงลึกมากขึ้นของปฏิสัมพันธ์ระหว่างเชื้อโรคกับยาที่สามารถทำได้ผ่าน AFM
ดูเพิ่มเติม
![]() พอร์ทัลวิทยาศาสตร์
พอร์ทัลวิทยาศาสตร์
อ่านเพิ่มเติม
- วอยก์เทิลเดอร์, เบิร์ต (2019) กล้องจุลทรรศน์แรงอะตอมนาโนวิทยาศาสตร์และเทคโนโลยี สปริงเกอร์. Bibcode : 2019afm..หนังสือ.....V . ดอย : 10.1007/978-3-030-13654-3 . ไอเอสบีเอ็น 978-3-030-13653-6. S2CID 199490753 .
- Carpick, Robert W.; Salmeron, Miquel (1997). "การขูดผิวเผิน: การตรวจสอบพื้นฐานของไตรโบโลยีด้วยกล้องจุลทรรศน์แรงอะตอม" Chemical Reviews . 97 (4): 1163– 1194. doi : 10.1021/cr960068q . ISSN 0009-2665 . PMID 11851446 .
- Giessibl, Franz J. (2003). "ความก้าวหน้าในกล้องจุลทรรศน์แรงอะตอม". บทวิจารณ์ฟิสิกส์สมัยใหม่75 ( 3): 949– 983. arXiv : cond-mat/0305119 . Bibcode : 2003RvMP...75..949G . doi : 10.1103/RevModPhys.75.949 . ISSN 0034-6861 . S2CID 18924292 .
- Garcia, Ricardo; Knoll, Armin; Riedo, Elisa (2014). "การพิมพ์หินด้วยหัววัดแบบสแกนขั้นสูง" Nature Nanotechnology . 9 (8): 577– 87. arXiv : 1505.01260 . Bibcode : 2014NatNa...9..577G . doi : 10.1038/NNANO.2014.157 . PMID 25091447 . S2CID 205450948 .
- García, Ricardo; Pérez, Rubén (2002). "วิธีการกล้องจุลทรรศน์แรงอะตอมแบบไดนามิก". รายงานวิทยาศาสตร์พื้นผิว47 ( 6– 8): 197– 301. Bibcode : 2002SurSR..47..197G . doi : 10.1016/S0167-5729(02)00077-8 .
ลิงก์ภายนอก
- การทำงานภายในของ AFM - คำอธิบายแบบภาพเคลื่อนไหว WeCanFigureThisOut.org