อ่าน 22 นาที
วงโคจรของเคปเลอร์
ในกลศาสตร์ท้องฟ้าวงโคจรเคปเลอร์(หรือวงโคจรแบบเคปเลอร์ซึ่งตั้งชื่อตามโยฮันเนส เคปเลอร์ นักดาราศาสตร์ชาวเยอรมัน ) คือการเคลื่อนที่ของวัตถุหนึ่งเทียบกับอีกวัตถุหนึ่ง...
วงโคจรของเคปเลอร์
ในกลศาสตร์ท้องฟ้าวงโคจรเคปเลอร์(หรือวงโคจรแบบเคปเลอร์ซึ่งตั้งชื่อตามโยฮันเนส เคปเลอร์ นักดาราศาสตร์ชาวเยอรมัน ) คือการเคลื่อนที่ของวัตถุหนึ่งเทียบกับอีกวัตถุหนึ่ง ในรูปของวงรีพาราโบลาหรือไฮเปอร์โบลา ซึ่งก่อให้เกิด ระนาบวงโคจรสองมิติในปริภูมิสามมิติ วงโคจรเคปเลอร์อาจมีแนวโน้มเข้าใกล้เส้นตรง ได้ เช่นกัน ทฤษฎีนี้พิจารณาเฉพาะแรงดึงดูดแบบจุดระหว่างวัตถุสองชิ้น โดยไม่คำนึงถึงการรบกวนเนื่องจากปฏิสัมพันธ์ทางแรงโน้มถ่วงกับวัตถุอื่น แรง ต้านของบรรยากาศแรงดันรังสีจากดวงอาทิตย์ วัตถุศูนย์กลาง ที่ไม่เป็นทรงกลมและอื่นๆ ดังนั้นจึงกล่าวได้ว่าเป็นคำตอบของกรณีพิเศษของปัญหาวัตถุสองชิ้นซึ่งรู้จักกันในชื่อปัญหาเคปเลอร์ในฐานะทฤษฎีในกลศาสตร์คลาสสิกมันจึงไม่คำนึงถึงผลกระทบของทฤษฎีสัมพัทธภาพทั่วไป วงโคจรแบบเคปเลอร์สามารถกำหนดพารามิเตอร์ได้เป็นองค์ประกอบวงโคจร หกส่วน ในหลายวิธี
ในการใช้งานส่วนใหญ่ จะมีวัตถุขนาดใหญ่เป็นศูนย์กลาง ซึ่งถือว่าจุดศูนย์กลางมวลของวัตถุนั้นเป็นจุดศูนย์กลางมวลของระบบทั้งหมด วงโคจรของวัตถุสองชิ้นที่มีมวลใกล้เคียงกันสามารถอธิบายได้ว่าเป็นวงโคจรแบบเคปเลอร์รอบจุดศูนย์กลางมวลร่วมของพวกมัน หรือ ที่เรียกว่า แบรีเซ็นเตอร์
การแนะนำ
ตั้งแต่สมัยโบราณจนถึงศตวรรษที่ 16 และ 17 เชื่อกันว่าการเคลื่อนที่ของดาวเคราะห์เป็นไปตาม เส้นทาง วงกลม ที่สมบูรณ์แบบโดยมีศูนย์กลางอยู่ที่ดวงอาทิตย์ ตามที่นักปรัชญากรีกโบราณอย่างอริสโตเติลและปโตเล มีสอนไว้ การเปลี่ยนแปลงในการเคลื่อนที่ของดาวเคราะห์ได้รับการอธิบายโดยเส้นทางวงกลมขนาดเล็กที่ซ้อนทับอยู่บนเส้นทางขนาดใหญ่ (ดูวงโคจรย่อย ) เมื่อการวัดดาวเคราะห์มีความแม่นยำมากขึ้นเรื่อยๆ จึงมีการเสนอการแก้ไขทฤษฎี ในปี ค.ศ. 1543 นิโคลาอุส โคเปอร์นิคัสได้ตีพิมพ์แบบ จำลอง ระบบสุริยะ แบบ เฮลิโอเซนทริก แม้ว่าเขายังคงเชื่อว่าดาวเคราะห์เคลื่อนที่ในเส้นทางวงกลมที่สมบูรณ์แบบโดยมีศูนย์กลางอยู่ที่ดวงอาทิตย์[ 1 ]
การพัฒนากฎหมาย
ในปี ค.ศ. 1601 โยฮันเนส เคปเลอร์ได้รับข้อมูลการสังเกตการณ์ดาวเคราะห์อย่างละเอียดถี่ถ้วนจากไทโค บราเฮ เคปเลอร์ใช้เวลาห้าปีต่อมาในการพยายามปรับข้อมูลการสังเกตการณ์ดาวอังคาร ให้เข้ากับเส้นโค้งต่างๆ ในปี ค.ศ. 1609 เคปเลอร์ได้ตีพิมพ์ กฎการเคลื่อนที่ของดาวเคราะห์สองข้อแรกจากทั้งหมดสาม ข้อ กฎข้อแรกกล่าวว่า:
วงโคจรของดาวเคราะห์ทุกดวงเป็นรูปวงรีโดยมีดวงอาทิตย์อยู่ที่จุดโฟกัส
โดยทั่วไปแล้ว เส้นทางการเคลื่อนที่ของวัตถุที่เคลื่อนที่แบบเคปเลอร์อาจเป็นรูปพาราโบลาหรือไฮเปอร์โบลาซึ่งจัดอยู่ในกลุ่มเส้นโค้งที่เรียกว่าภาคตัดกรวย ร่วมกับวงรีในทางคณิตศาสตร์ ระยะห่างระหว่างวัตถุศูนย์กลางกับวัตถุที่โคจรสามารถแสดงได้ดังนี้:

ที่ไหน:
- คือระยะทาง
- คือแกนกึ่งเอกซึ่งเป็นตัวกำหนดขนาดของวงโคจร
- คือค่าความเยื้องศูนย์กลางซึ่งเป็นตัวกำหนดรูปร่างของวงโคจร
- ค่าความผิดปกติที่แท้จริงคือ มุมระหว่างตำแหน่งปัจจุบันของวัตถุที่โคจรอยู่กับตำแหน่งในวงโคจรที่วัตถุนั้นอยู่ใกล้กับวัตถุศูนย์กลางมากที่สุด (เรียกว่าจุดใกล้ที่สุด )




อีกวิธีหนึ่ง สมการสามารถแสดงได้ดังนี้:

โดยที่เรียกว่ากึ่งแกนลาตัสเรกตัมของเส้นโค้ง สมการรูปแบบนี้มีประโยชน์อย่างยิ่งเมื่อต้องจัดการกับวิถีโค้งแบบพาราโบลา ซึ่งแกนกึ่งเอกมีค่าเป็นอนันต์

แม้ว่าเคปเลอร์จะพัฒนากฎเหล่านี้จากการสังเกต แต่เขาก็ไม่สามารถพัฒนาทฤษฎีเพื่ออธิบายการเคลื่อนที่เหล่านี้ได้[ 2 ]ไอแซค นิวตันได้สร้างทฤษฎีดังกล่าวขึ้นเป็นครั้งแรกโดยอิงจากแนวคิดเรื่องแรงโน้มถ่วงทฤษฎีสัมพัทธภาพทั่วไปของอัลเบิร์ต ไอน์สไตน์เป็นคำอธิบายปัจจุบันของแรงโน้มถ่วงในฟิสิกส์สมัยใหม่ปัญหาของวัตถุสองชิ้นในทฤษฎีสัมพัทธภาพทั่วไปไม่มีคำตอบในรูปแบบปิด
ไอแซค นิวตัน
ระหว่างปี ค.ศ. 1665 ถึง 1666 ไอแซค นิวตันได้พัฒนาแนวคิดหลายอย่างที่เกี่ยวข้องกับการเคลื่อนที่ แรงโน้มถ่วง และแคลคูลัสเชิงอนุพันธ์ อย่างไรก็ตาม แนวคิดเหล่านี้ไม่ได้ถูกตีพิมพ์จนกระทั่งปี ค.ศ. 1687 ในหนังสือPrincipiaซึ่งเขาได้สรุปกฎการเคลื่อนที่และกฎแรงโน้มถ่วงสากล ของเขา ไว้ กฎการเคลื่อนที่ข้อที่สองจากสามข้อของเขากล่าวว่า:
ความเร่งของวัตถุจะขนานและแปรผันตรงกับแรงลัพธ์ที่กระทำต่อวัตถุ มีทิศทางเดียวกับแรงลัพธ์ และแปรผันผกผันกับมวลของวัตถุ
ที่ไหน:
- คือเวกเตอร์แรง
- คือมวลของวัตถุที่แรงกระทำอยู่
- คือเวกเตอร์ความเร่ง ซึ่งเป็นอนุพันธ์อันดับสองของเวกเตอร์ตำแหน่งเทียบกับเวลา





กล่าวโดยเคร่งครัดแล้ว สมการรูปแบบนี้ใช้ได้เฉพาะกับวัตถุที่มีมวลคงที่เท่านั้น ซึ่งเป็นความจริงตามสมมติฐานที่ทำให้ง่ายขึ้นที่กล่าวไว้ด้านล่าง
กฎแรงโน้มถ่วงของนิวตันกล่าวว่า:
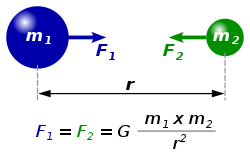
มวลจุดทุก จุด ดึงดูดมวลจุดอื่นทุกจุดด้วยแรงที่ชี้ไปตามเส้นตรงที่ตัดผ่านจุดทั้งสอง แรงนี้เป็นสัดส่วนโดยตรงกับผลคูณของมวลทั้งสองและแปรผกผันกับกำลังสองของระยะห่างระหว่างมวลจุดทั้งสอง:
ที่ไหน:
- คือขนาดของแรงโน้มถ่วงระหว่างมวลจุดสองจุด
- คือค่าคงที่ความโน้มถ่วง
- คือมวลของจุดมวลแรก
- คือมวลของจุดมวลที่สอง
- คือระยะห่างระหว่างจุดมวลสองจุด





จากกฎการเคลื่อนที่และกฎแรงโน้มถ่วงสากล นิวตันสามารถอนุมานกฎของเคปเลอร์ได้ ซึ่งเป็นกฎเฉพาะสำหรับการเคลื่อนที่ในวงโคจรในทางดาราศาสตร์ เนื่องจากกฎของเคปเลอร์ได้รับการสนับสนุนอย่างดีจากข้อมูลการสังเกตการณ์ ความสอดคล้องนี้จึงเป็นหลักฐานสนับสนุนที่แข็งแกร่งสำหรับความถูกต้องของทฤษฎีทั่วไปของนิวตัน และรวมกลศาสตร์ดาราศาสตร์และกลศาสตร์ทั่วไปเข้าด้วยกัน กฎการเคลื่อนที่เหล่านี้เป็นพื้นฐานของกลศาสตร์ดาราศาสตร์ สมัยใหม่ จนกระทั่งอัลเบิร์ต ไอน์สไตน์นำเสนอแนวคิดของทฤษฎี สัมพัทธ ภาพพิเศษและ สัมพัทธภาพ ทั่วไปในช่วงต้นศตวรรษที่ 20 สำหรับการใช้งานส่วนใหญ่ การเคลื่อนที่แบบเคปเลอร์ประมาณการการเคลื่อนที่ของดาวเคราะห์และดาวบริวารได้แม่นยำในระดับค่อนข้างสูง และถูกนำไปใช้อย่างกว้างขวางในดาราศาสตร์และพลศาสตร์ดาราศาสตร์
ปัญหาสองวัตถุแบบง่าย
ในการหาการเคลื่อนที่ของวัตถุในระบบสองวัตถุสามารถใช้สมมติฐานแบบง่ายสองข้อได้ดังนี้:
- วัตถุเหล่านี้มีสมมาตรทรงกลมและสามารถพิจารณาได้ว่าเป็นมวลจุด
- ไม่มีแรงภายนอกหรือภายในใด ๆ กระทำต่อวัตถุเหล่านั้น นอกเหนือจากแรงโน้มถ่วงระหว่างกัน
วัตถุทางดาราศาสตร์ขนาดใหญ่มีรูปร่างคล้ายทรงกลม ด้วยสมมาตร แรงโน้มถ่วงสุทธิที่ดึงดูดจุดมวลเข้าหาทรงกลมเนื้อเดียวกันจะต้องมีทิศทางเข้าสู่จุดศูนย์กลางทฤษฎีบทเปลือกทรงกลม (ซึ่งไอแซค นิวตันได้พิสูจน์ไว้เช่นกัน) กล่าวว่าขนาดของแรงนี้จะเท่ากับกรณีที่มวลทั้งหมดรวมอยู่ที่กึ่งกลางของทรงกลม แม้ว่าความหนาแน่นของทรงกลมจะแปรผันตามความลึก (เช่นเดียวกับวัตถุทางดาราศาสตร์ส่วนใหญ่) จากนี้จึงสรุปได้ทันทีว่าแรงดึงดูดระหว่างทรงกลมเนื้อเดียวกันสองลูกนั้นเสมือนว่ามวลของทั้งสองลูกรวมอยู่ที่จุดศูนย์กลาง
วัตถุขนาดเล็ก เช่นดาวเคราะห์น้อยหรือยานอวกาศมักมีรูปร่างที่เบี่ยงเบนไปจากทรงกลมอย่างมาก แต่แรงโน้มถ่วงที่เกิดจากความไม่สม่ำเสมอเหล่านี้โดยทั่วไปมีขนาดเล็กเมื่อเทียบกับแรงโน้มถ่วงของวัตถุศูนย์กลาง ความแตกต่างระหว่างรูปร่างที่ไม่สม่ำเสมอและทรงกลมที่สมบูรณ์แบบจะลดลงตามระยะทาง และระยะทางวงโคจรส่วนใหญ่มีขนาดใหญ่มากเมื่อเทียบกับเส้นผ่านศูนย์กลางของวัตถุโคจรขนาดเล็ก ดังนั้นสำหรับการใช้งานบางอย่าง ความไม่สม่ำเสมอของรูปร่างสามารถละเลยได้โดยไม่ส่งผลกระทบต่อความแม่นยำอย่างมีนัยสำคัญ ผลกระทบนี้ค่อนข้างสังเกตได้สำหรับดาวเทียมเทียมของโลก โดยเฉพาะอย่างยิ่งดาวเทียมที่โคจรในวงโคจรต่ำ
ดาวเคราะห์หมุนรอบตัวเองด้วยอัตราที่แตกต่างกัน จึงอาจมีรูปร่างแบนเล็กน้อยเนื่องจากแรงเหวี่ยงหนีศูนย์กลาง ด้วยรูปร่างแบนเช่นนี้ แรงดึงดูดจะเบี่ยงเบนไปจากทรงกลมเนื้อเดียวกันเล็กน้อย ในระยะทางที่ไกลออกไป ผลกระทบของความแบนนี้จะแทบไม่มีนัยสำคัญ การเคลื่อนที่ของดาวเคราะห์ในระบบสุริยะสามารถคำนวณได้อย่างแม่นยำเพียงพอหากพิจารณาว่าพวกมันเป็นมวลจุด
วัตถุมวลจุดสองชิ้นที่มีมวลและเวกเตอร์ตำแหน่งและสัมพันธ์กับกรอบอ้างอิงเฉื่อย บางกรอบ จะได้รับแรงโน้มถ่วงกระทำต่อกัน:




โดยที่คือเวกเตอร์ตำแหน่งสัมพัทธ์ของมวล 1 เทียบกับมวล 2 ซึ่งแสดงได้ดังนี้:

และคือเวกเตอร์หน่วยในทิศทางนั้น และคือความยาวของเวกเตอร์นั้น

เมื่อหารด้วยมวลของวัตถุทั้งสอง และลบสมการที่สองออกจากสมการแรก จะได้สมการการเคลื่อนที่สำหรับการเร่งความเร็วของวัตถุแรกเทียบกับวัตถุที่สอง:
| 1 |

โดยที่เป็นพารามิเตอร์ความโน้มถ่วง และ เท่ากับ


ในการใช้งานหลายๆ กรณี สามารถใช้สมมติฐานที่ทำให้ง่ายขึ้นข้อที่สามได้:


ข้อสมมติฐานนี้ไม่จำเป็นต่อการแก้ปัญหาสองวัตถุแบบง่าย แต่จะทำให้การคำนวณง่ายขึ้น โดยเฉพาะอย่างยิ่งกับดาวเทียมที่โคจรรอบโลกและดาวเคราะห์ที่โคจรรอบดวงอาทิตย์ แม้แต่ มวลของ ดาวพฤหัสบดีก็ยังน้อยกว่าดวงอาทิตย์ถึง 1047 เท่า[ 3 ]ซึ่งจะทำให้เกิดข้อผิดพลาด 0.096% ในค่าของ α ข้อยกเว้นที่น่าสนใจ ได้แก่ ระบบโลก-ดวงจันทร์ (อัตราส่วนมวล 81.3) ระบบพลูโต-ชารอน (อัตราส่วนมวล 8.9) และระบบดาวคู่ ภายใต้ข้อสมมติฐานเหล่านี้ สมการเชิงอนุพันธ์สำหรับกรณีสองวัตถุสามารถแก้ไขได้อย่างสมบูรณ์ทางคณิตศาสตร์ และวงโคจรที่ได้ซึ่งเป็นไปตามกฎการเคลื่อนที่ของดาวเคราะห์ของเคปเลอร์เรียกว่า "วงโคจรของเคปเลอร์" วงโคจรของดาวเคราะห์ทั้งหมดเป็นวงโคจรของเคปเลอร์รอบดวงอาทิตย์ที่มีความแม่นยำสูง ความเบี่ยงเบนเล็กน้อยเกิดจากแรงดึงดูดระหว่างดาวเคราะห์ที่อ่อนกว่ามาก และในกรณีของดาวพุธเกิดจาก ทฤษฎีสั มพัทธภาพทั่วไปวงโคจรของดาวเทียมเทียมรอบโลกนั้น โดยประมาณแล้วเป็นวงโคจรแบบเคปเลอร์ที่มีการรบกวนเล็กน้อยเนื่องจากแรงดึงดูดของดวงอาทิตย์ ดวงจันทร์ และความแบนของโลก ในการใช้งานที่ต้องการความแม่นยำสูง ซึ่งต้องคำนวณสมการการเคลื่อนที่ด้วยวิธีเชิงตัวเลข โดยคำนึงถึงแรงโน้มถ่วงและแรงที่ไม่ใช่แรงโน้มถ่วงทั้งหมด (เช่นแรงดันรังสีจากดวงอาทิตย์และแรงต้านอากาศ ) แนวคิดวงโคจรแบบเคปเลอร์มีความสำคัญอย่างยิ่งและถูกนำมาใช้อย่างแพร่หลาย
องค์ประกอบแบบเคปเลอร์

วิถีโคจรแบบเคปเลอร์สามารถกำหนดได้ด้วยพารามิเตอร์หกตัว การเคลื่อนที่ของวัตถุในอวกาศสามมิติมีลักษณะเฉพาะด้วยเวกเตอร์ตำแหน่งและเวกเตอร์ความเร็ว เวกเตอร์แต่ละตัวมีสามองค์ประกอบ ดังนั้นจำนวนค่าทั้งหมดที่จำเป็นในการกำหนดวิถีโคจรผ่านอวกาศจึงมีหกค่า โดยทั่วไปแล้ววงโคจรจะถูกกำหนดด้วยองค์ประกอบหกตัว (เรียกว่าองค์ประกอบเคปเลอร์ ) ซึ่งสามารถคำนวณได้จากตำแหน่งและความเร็ว โดยสามในหกตัวได้กล่าวถึงไปแล้ว องค์ประกอบเหล่านี้สะดวกตรงที่ในหกตัวนั้น ห้าตัวจะไม่เปลี่ยนแปลงสำหรับวงโคจรที่ไม่ถูกรบกวน (ซึ่งแตกต่างอย่างสิ้นเชิงกับเวกเตอร์สองตัวที่เปลี่ยนแปลงอยู่ตลอดเวลา) ตำแหน่งในอนาคตของวัตถุภายในวงโคจรสามารถทำนายได้ และตำแหน่งและความเร็วใหม่ของวัตถุสามารถหาได้ง่ายจากองค์ประกอบวงโคจร
ปัจจัยสองประการกำหนดขนาดและรูปร่างของวิถีการเคลื่อนที่:
- แกนกึ่งเอก ( )
- ความแปลกประหลาด ( )
ปัจจัยสามประการกำหนดทิศทางของระนาบวงโคจร :
- ความเอียง ( ) กำหนดมุมระหว่างระนาบวงโคจรและระนาบอ้างอิง
- เส้นลองจิจูดของจุดขึ้น ( ) กำหนดมุมระหว่างทิศทางอ้างอิงและการตัดขึ้นของวงโคจรบนระนาบอ้างอิง (จุดขึ้น)
- อาร์กิวเมนต์ของจุดใกล้ที่สุด ( ) กำหนดมุมระหว่างจุดขึ้นและจุดใกล้ที่สุด



และสุดท้ายนี้:
- ค่าความผิดปกติที่แท้จริง ( ) กำหนดตำแหน่งของวัตถุที่โคจรตามวิถีโคจร โดยวัดจากจุดใกล้ที่สุดของวงโคจร (periapsis) สามารถใช้ค่าอื่นแทนค่าความผิดปกติที่แท้จริงได้ โดยค่าที่ใช้กันทั่วไปคือค่าความผิดปกติเฉลี่ยและซึ่งเป็นเวลาตั้งแต่จุดใกล้ที่สุดของวงโคจร (periapsis)


เนื่องจาก, และเป็นเพียงการวัดเชิงมุมที่กำหนดทิศทางของวิถีโคจรในกรอบอ้างอิง จึงไม่จำเป็นอย่างยิ่งเมื่อกล่าวถึงการเคลื่อนที่ของวัตถุภายในระนาบวงโคจร ที่กล่าวถึงไว้ที่นี่เพื่อความสมบูรณ์ แต่ไม่จำเป็นสำหรับการพิสูจน์ด้านล่าง
วิธีแก้ปัญหาทางคณิตศาสตร์ของสมการเชิงอนุพันธ์ ( 1 ) ข้างต้น
สำหรับการเคลื่อนที่ภายใต้แรงสู่ศูนย์กลางใดๆ กล่าวคือ แรงที่ขนานกับr โมเมนตัมเชิงมุมสัมพัทธ์จำเพาะ จะคงที่:


เนื่องจากผลคูณเชิงเวกเตอร์ของเวกเตอร์ตำแหน่งและเวกเตอร์ความเร็วคงที่ ดังนั้นเวกเตอร์ทั้งสองต้องอยู่ในระนาบเดียวกันและตั้งฉากกับซึ่งหมายความว่าฟังก์ชันเวกเตอร์เป็น เส้น โค้ง ระนาบ

เนื่องจากสมการมีความสมมาตรรอบจุดกำเนิด จึงแก้ได้ง่ายกว่าในพิกัดเชิงขั้ว อย่างไรก็ตาม สมการ ( 1 ) หมายถึงความเร่งเชิงเส้นไม่ใช่ความเร่งเชิงมุมหรือเชิงรัศมีดังนั้นจึงต้องระมัดระวังเมื่อแปลงสมการ การแนะนำระบบพิกัดคาร์ทีเซียนและเวกเตอร์หน่วยเชิงขั้วในระนาบตั้งฉากกับ:






เราสามารถเขียนฟังก์ชันเวกเตอร์และอนุพันธ์ของมันใหม่ได้ดังนี้:

(ดู " แคลคูลัสเวกเตอร์ ") เมื่อแทนค่าเหล่านี้ลงใน ( 1 ) เราจะพบว่า:

ซึ่งจะได้สมการเชิงอนุพันธ์สามัญในสองตัวแปร คือและ:
| 2 |

เพื่อแก้สมการนี้ จำเป็นต้องกำจัดอนุพันธ์เทียบกับเวลาทั้งหมด ซึ่งจะได้ผลลัพธ์ดังนี้:

| 3 |

การหาอนุพันธ์เทียบกับเวลาของ ( 3 ) จะได้
| 4 |

สมการ ( 3 ) และ ( 4 ) ช่วยให้เรากำจัดอนุพันธ์เทียบกับเวลาของ ได้เพื่อกำจัดอนุพันธ์เทียบกับเวลาของจะใช้กฎลูกโซ่เพื่อหาการแทนที่ที่เหมาะสม:
| 5 |

| 6 |

เมื่อใช้การแทนที่ทั้งสี่นี้ อนุพันธ์เวลาทั้งหมดใน ( 2 ) สามารถกำจัดได้ ทำให้ได้สมการเชิงอนุพันธ์สามัญสำหรับเป็นฟังก์ชันของ



| 7 |

สมการเชิงอนุพันธ์ ( 7 ) สามารถแก้ได้โดยวิธีวิเคราะห์โดยการแทนที่ตัวแปร
| 8 |

เมื่อใช้กฎลูกโซ่ในการหาอนุพันธ์จะได้:
| 9 |

| 10 |

การใช้นิพจน์ ( 10 ) และ ( 9 ) สำหรับและจะได้


| 11 |

ด้วยวิธีแก้ปัญหาทั่วไป
| 12 |

โดยที่eและเป็นค่าคงที่ของการอินทิเกรตซึ่งขึ้นอยู่กับค่าเริ่มต้นของsและ


แทนที่จะใช้ค่าคงที่ของการอินทิเกรตโดยตรง เราจะใช้ข้อตกลงว่าเวกเตอร์หน่วยที่กำหนดระบบพิกัดในระนาบวงโคจรนั้นถูกเลือกให้มีค่าเป็นศูนย์และeมีค่าเป็นบวก ซึ่งหมายความว่ามีค่าเป็นศูนย์ ณ จุดที่มีค่าสูงสุด และดังนั้น จึงมีค่าต่ำสุด การกำหนดพารามิเตอร์pเป็น จะได้ว่า





การอนุมานทางเลือก
อีกวิธีหนึ่งในการแก้สมการนี้โดยไม่ต้องใช้สมการเชิงอนุพันธ์เชิงขั้วมีดังนี้:
กำหนดเวกเตอร์หน่วย, , โดยที่และ. ดังนั้น





ลองพิจารณาดูตอนนี้
![{\displaystyle {\ddot {\mathbf {r} }}\times \mathbf {H} =-{\frac {\alpha }{r^{2}}}\mathbf {u} \times (r^{2}\mathbf {u} \times {\dot {\mathbf {u} }})=-\alpha \mathbf {u} \times (\mathbf {u} \times {\dot {\mathbf {u} }})=-\alpha [(\mathbf {u} \cdot {\dot {\mathbf {u} }})\mathbf {u} -(\mathbf {u} \cdot \mathbf {u} ){\dot {\mathbf {u} }}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3af54235ba518c0147c3ffab79bb03a2fb35e68f)
(ดูผลคูณสามเวกเตอร์ ) โปรดสังเกตว่า


เมื่อแทนค่าเหล่านี้ลงในสมการก่อนหน้าจะได้:

การบูรณาการทั้งสองด้าน:

โดยที่cเป็นเวกเตอร์คงที่ การดอทเวกเตอร์นี้ด้วยrจะได้ผลลัพธ์ที่น่าสนใจ: โดยที่คือมุมระหว่างและแก้สมการหาค่าr :



โปรดสังเกตว่า นั้นก็คือพิกัดเชิงขั้วของฟังก์ชันเวกเตอร์นั่นเอง เมื่อทำการแทนที่และเราก็จะได้สมการ อีกครั้ง



| 13 |

นี่คือสมการในพิกัดเชิงขั้วสำหรับภาคตัดกรวยที่มีจุดกำเนิดอยู่ที่จุดโฟกัส ค่าอาร์กิวเมนต์นี้เรียกว่า "ค่าผิดปกติที่แท้จริง" (true anomaly)
เวกเตอร์ความเยื้องศูนย์
โปรดสังเกตด้วยว่า เนื่องจาก θ คือมุมระหว่างเวกเตอร์ตำแหน่งและค่าคงที่ของการอินทิเกรตเวกเตอร์จึงต้องชี้ไปในทิศทางของจุดใกล้ที่สุดของวงโคจร จากนั้นเราสามารถกำหนดเวกเตอร์ความเยื้องศูนย์กลางที่เกี่ยวข้องกับวงโคจรได้ดังนี้:

โดยที่เป็นเวกเตอร์โมเมนตัมเชิงมุมคงที่ของวงโคจร และเป็นเวกเตอร์ความเร็วที่สัมพันธ์กับเวกเตอร์ตำแหน่ง


เห็นได้ชัดว่าเวกเตอร์ความเยื้องศูนย์ซึ่งมีทิศทางเดียวกับค่าคงที่ของการอินทิเกรตชี้ไปยังทิศทางของจุดใกล้ที่สุดของวงโคจร และมีขนาดเท่ากับความเยื้องศูนย์ของวงโคจร ทำให้มีประโยชน์มากในการกำหนดวงโคจร (OD) สำหรับองค์ประกอบวงโคจรของวงโคจรเมื่อทราบ เวกเตอร์สถานะ [ ] หรือ [ ]


คุณสมบัติของสมการวิถีโคจร
เนื่องจากนี่คือวงกลมที่มีรัศมี p

เพราะนี่คือวงรีที่มี

| 14 |

| 15 |

เนื่องจากนี่คือพาราโบลาที่มีความยาวโฟกัส


เพราะนี่คือไฮเปอร์โบลาที่มี

| 16 |

| 17 |

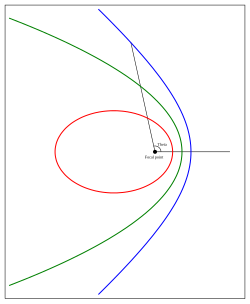
ภาพต่อไปนี้แสดงวงกลม (สีเทา) วงรี (สีแดง) พาราโบลา (สีเขียว) และไฮเปอร์โบลา (สีน้ำเงิน)

จุดบนเส้นแนวนอนที่ลากออกไปทางขวาจากจุดโฟกัส คือจุดที่ระยะห่างจากจุดโฟกัสมีค่าน้อยที่สุด ซึ่งเรียกว่าจุดใกล้สุด ( pericentre) สำหรับวงรี ยังมีจุดไกลสุด (apocentre) ซึ่งเป็นจุดที่ระยะห่างจากจุดโฟกัสมีค่ามากที่สุดสำหรับไฮเปอร์โบลา ช่วงของคือ และสำหรับพาราโบลา ช่วงของ คือ





โดยใช้กฎลูกโซ่สำหรับการหาอนุพันธ์ ( 5 ) สมการ ( 2 ) และนิยามของpจะได้ว่าส่วนประกอบความเร็วเชิงรัศมีคือ

| 18 |

และส่วนประกอบสัมผัส (ส่วนประกอบความเร็วที่ตั้งฉากกับ) คือ

| 19 |

ความสัมพันธ์ระหว่างค่าพิกัดเชิงขั้วและเวลาtจะแตกต่างกันเล็กน้อยสำหรับวงโคจรแบบวงรีและแบบไฮเปอร์โบลา
สำหรับวงโคจรวงรี จะเปลี่ยนไปใช้ " ความผิดปกติเชิงวงรี " Eซึ่ง
| 20 |

| 21 |

และด้วยเหตุนี้
| 22 |

| 23 |

และโมเมนตัมเชิงมุมHคือ
| 24 |

การอินทิเกรตเทียบกับเวลาtจะได้
| 25 |

ภายใต้สมมติฐานว่าเวลาที่เลือกนั้นมีค่าคงที่ของการอินทิเกรตเป็นศูนย์

เนื่องจากตามนิยามของp นั้นมีอยู่หนึ่งอย่าง
| 26 |

สามารถเขียนสิ่งนี้ได้
| 27 |

สำหรับวงโคจรไฮเปอร์โบลิก จะใช้ฟังก์ชันไฮเปอร์โบลิกในการกำหนดพารามิเตอร์
| 28 |

| 29 |

ซึ่งหนึ่งมี
| 30 |

| 31 |

และโมเมนตัมเชิงมุมHคือ
| 32 |

การอินทิเกรตเทียบกับเวลาtจะได้
| 33 |

เช่น
| 34 |

ในการหาเวลา t ที่สอดคล้องกับความผิดปกติที่แท้จริงบางอย่าง จะต้องคำนวณพารามิเตอร์E ที่ สอดคล้องกับเวลาด้วยความสัมพันธ์ ( 27 ) สำหรับวงโคจรวงรีและด้วยความสัมพันธ์ ( 34 ) สำหรับวงโคจรไฮเปอร์โบลา
โปรดทราบว่าความสัมพันธ์ ( 27 ) และ ( 34 ) กำหนดการแมประหว่างช่วง
![{\displaystyle \left[-\infty <t<\infty \right]\longleftrightarrow \left[-\infty <E<\infty \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/40f4c2d85484a0f71543d4fe4ccd324f527a0142)
สูตรเพิ่มเติมบางส่วน
วงโคจรวงรี
สำหรับวงโคจรวงรีจะได้จาก ( 20 ) และ ( 21 ) ว่า
| 35 |

และด้วยเหตุนี้
| 36 |

จาก ( 36 ) จึงสรุปได้ว่า

จากการสร้างทางเรขาคณิตที่กำหนดความผิดปกติแบบเยื้องศูนย์นั้น เห็นได้ชัดว่าเวกเตอร์และอยู่ด้านเดียวกันของ แกน xจากนั้นจึงสรุปได้ว่าเวกเตอร์และอยู่ในควอดแรนต์เดียวกัน ดังนั้นจึงได้ว่า




| 37 |

และนั่น
| 38 |

| 39 |

โดยที่ " " คือค่าพิกัดเชิงขั้วของเวกเตอร์และnถูกเลือกเพื่อให้



สำหรับการคำนวณเชิงตัวเลขของฟังก์ชันมาตรฐานATAN2(y,x) (หรือในรูปแบบความแม่นยำสองเท่า DATAN2(y,x)) ที่มีอยู่ในภาษาโปรแกรม FORTRANเป็นต้นสามารถใช้ได้
โปรดทราบว่านี่คือการจับคู่ระหว่างช่วงต่างๆ
![{\displaystyle \left[-\infty <\theta <\infty \right]\longleftrightarrow \left[-\infty <E<\infty \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a733a34a4893dfafb8c3df87c470eeb8d9e324b9)
วงโคจรไฮเปอร์โบลิก
สำหรับวงโคจรไฮเปอร์โบลิกจะได้จาก ( 28 ) และ ( 29 ) ว่า
| 40 |

และด้วยเหตุนี้
| 41 |

เนื่องจาก และและมีเครื่องหมายเดียวกัน จึงสรุปได้ว่า



| 42 |

ความสัมพันธ์นี้สะดวกสำหรับการส่งผ่านระหว่าง "ความผิดปกติที่แท้จริง" และพารามิเตอร์Eซึ่งเชื่อมโยงกับเวลาผ่านความสัมพันธ์ ( 34 ) โปรดทราบว่านี่คือการแมประหว่างช่วงต่างๆ และสามารถคำนวณได้โดยใช้ความสัมพันธ์
![{\displaystyle \left[-\cos ^{-1}\left(-{\frac {1}{e}}\right)<\theta <\cos ^{-1}\left(-{\frac {1}{e}}\right)\right]\longleftrightarrow \left[-\infty <E<\infty \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/12031710e1f6bab0ee6c0d8d016315cd06e66813)


จากความสัมพันธ์ ( 27 ) จะได้ว่าคาบการโคจรPสำหรับวงโคจรวงรีคือ
| 43 |

เนื่องจากพลังงานศักยภาพที่สอดคล้องกับสนามแรงของความสัมพันธ์ ( 1 ) เป็น ไปตาม ( 13 ), ( 14 ), ( 18 ) และ ( 19 ) ว่าผลรวมของพลังงานจลน์และพลังงานศักยภาพ สำหรับวงโคจรวงรีคือ


| 44 |

และจาก ( 13 ), ( 16 ), ( 18 ) และ ( 19 ) ว่าผลรวมของพลังงานจลน์และพลังงานศักย์สำหรับวงโคจรไฮเปอร์โบลิกคือ
| 45 |

เมื่อพิจารณาระบบพิกัดเฉื่อย ในระนาบวงโคจรโดยสัมพันธ์กับจุดใกล้ที่สุด จะได้จาก ( 18 ) และ ( 19 ) ว่าส่วนประกอบความเร็วคือ

| 46 |

| 47 |

สมการของจุดศูนย์กลางเชื่อมโยงความผิดปกติเฉลี่ยกับความผิดปกติที่แท้จริงสำหรับวงโคจรวงรี สำหรับค่าความเยื้องศูนย์กลางเชิงตัวเลขขนาดเล็ก
วงโคจรพาราโบลา
สำหรับ วงโคจร พาราโบลาให้และใน ( 13 ) เพื่อให้วงโคจรในพิกัดเชิงขั้วคือ


ซึ่งจะทำให้ได้วงโคจรในพิกัดคาร์ทีเซียนดังนี้

นี่คือพาราโบลา[ 4 ]ที่มีความยาวโฟกัสและจุดโฟกัสอยู่ที่จุดกำเนิด พาราโบลาขยายไปถึงลบอนันต์ใน ในแง่ของความผิดปกติที่แท้จริงและระยะทางจุด ใกล้ที่สุด สมการสำหรับพิกัด x และ y คือ[ 5 ]




ตามความจำเป็น

พื้นที่ที่รัศมีเวกเตอร์กวาดออกไปจากจุดใกล้ที่สุดของวงโคจรคือ


ตามกฎข้อที่สองของเคปเลอร์ที่ว่า พื้นที่เท่ากันในเวลาเท่ากัน ดังนั้นค่านี้จะต้องแปรผันตรงกับเวลาตั้งแต่จุดใกล้ที่สุดของวงโคจร ให้เป็นค่าคงที่ของการแปรผันตรง ดังนั้น




การหาอนุพันธ์เทียบกับ t จะได้

ตามหลักการอนุรักษ์พลังงาน ผลรวมของพลังงานจลน์และพลังงานศักย์จะต้องไม่ขึ้นอยู่กับซึ่งกำหนดโดย



เพราะการที่จะเป็นอิสระจากสิ่งนั้นได้จะต้องเป็นเช่นนั้น


ซึ่งทำให้พลังงานรวมเป็นศูนย์ตามที่คาดไว้ จากนั้น[ 6 ]

นี่คือสมการของบาร์เกอร์และสามารถหาคำตอบที่แน่นอนสำหรับ ได้ จงแก้ สมการกำลังสามนี้โดยกำหนดให้ เป็นค่าคงที่


เพื่อให้ได้มา

นี่คือสมการกำลังสองที่มีคำตอบดังนี้

![{\displaystyle B={\sqrt[{3}]{A+{\sqrt {A^{2}+1}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7fe3cbe93b80fce8e7a352d1509be29cf429f6e)
การหาค่าวงโคจรของเคปเลอร์ที่สอดคล้องกับสถานะเริ่มต้นที่กำหนด
นี่คือ " ปัญหาค่าเริ่มต้น " สำหรับสมการเชิงอนุพันธ์ ( 1 ) ซึ่งเป็นสมการอันดับหนึ่งสำหรับ "เวกเตอร์สถานะ" 6 มิติเมื่อเขียนเป็น

| 48 |

| 49 |

สำหรับค่าใดๆ ของ "เวกเตอร์สถานะ" เริ่มต้นวงโคจรของเคปเลอร์ที่สอดคล้องกับคำตอบของปัญหาค่าเริ่มต้นนี้ สามารถหาได้โดยใช้อัลกอริทึมต่อไปนี้:

กำหนดเวกเตอร์หน่วยตั้งฉากผ่าน

| 50 |

| 51 |

ด้วยและ


จาก ( 13 ), ( 18 ) และ ( 19 ) จะเห็นได้ว่าโดยการตั้งค่า
| 52 |

และโดยการกำหนดและเช่นนั้น

| 53 |

| 54 |

ที่ไหน
| 55 |

จะได้วงโคจรของเคปเลอร์ซึ่งสำหรับความผิดปกติที่แท้จริงจะ มีค่า rและ ค่า เดียวกันกับที่กำหนดโดย ( 50 ) และ ( 51 )

ถ้าวงโคจรของเคปเลอร์นี้มีเวกเตอร์เดียวกันสำหรับความผิดปกติที่แท้จริงนี้เช่นเดียวกับที่กำหนดโดย ( 50 ) และ ( 51 ) เวกเตอร์สถานะของวงโคจรของเคปเลอร์จะมีค่าที่ต้องการสำหรับความผิดปกติที่แท้จริง
ระบบพิกัดคงที่แบบมาตรฐานในระนาบวงโคจร (โดยมีทิศทางจากจุดศูนย์กลางของทรงกลมเนื้อเดียวกันไปยังจุดใกล้ที่สุดของวงโคจร) ซึ่งกำหนดทิศทางของภาคตัดกรวย (วงรี พาราโบลา หรือไฮเปอร์โบลา) สามารถกำหนดได้ด้วยความสัมพันธ์ดังนี้

| 56 |

| 57 |

โปรดทราบว่าความสัมพันธ์ ( 53 ) และ ( 54 ) มีจุดเอกฐานเมื่อและ กล่าวคือ


| 58 |

ซึ่งก็คือวงโคจรวงกลมที่สอดคล้องกับสถานะเริ่มต้น
วงโคจรสัมผัสของเคปเลอร์
สำหรับเวกเตอร์สถานะใดๆ วงโคจรเคปเลอร์ที่สอดคล้องกับสถานะนี้สามารถคำนวณได้ด้วยอัลกอริทึมที่กำหนดไว้ข้างต้น ขั้นแรก จะกำหนดพารามิเตอร์ จาก และจากนั้นเวกเตอร์หน่วยตั้งฉากในระนาบวงโคจรโดยใช้ความสัมพันธ์ ( 56 ) และ ( 57 )


ถ้าตอนนี้สมการการเคลื่อนที่คือ
| 59 |

โดยที่ เป็นฟังก์ชันอื่นนอกเหนือจาก พารามิเตอร์ที่ได้, , , , ซึ่งกำหนดโดยจะเปลี่ยนแปลงไปตามเวลาทั้งหมด ต่างจากกรณีวงโคจรของเคปเลอร์ซึ่งจะมีเพียงพารามิเตอร์ เท่านั้นที่จะเปลี่ยนแปลง




วงโคจรของเคปเลอร์ที่คำนวณด้วยวิธีนี้จะมี "เวกเตอร์สถานะ" เดียวกันกับคำตอบของ "สมการการเคลื่อนที่" ( 59 ) ณ เวลาtเรียกว่า "วงโคจรสัมผัส" ณ เวลานี้
แนวคิดนี้มีประโยชน์ในกรณีตัวอย่างเช่น :


เป็น "แรงรบกวน" เล็กน้อย เช่น แรงดึงดูดอันอ่อนๆ จากวัตถุทางดาราศาสตร์อื่นๆ พารามิเตอร์ของวงโคจรแบบออสคิวเลชันของเคปเลอร์จะเปลี่ยนแปลงอย่างช้าๆ เท่านั้น และวงโคจรแบบออสคิวเลชันของเคปเลอร์เป็นค่าประมาณที่ดีของวงโคจรจริงในช่วงเวลาที่ยาวนานพอสมควร ทั้งก่อนและหลังเวลาออสคิวเลชัน
แนวคิดนี้ยังมีประโยชน์สำหรับจรวดในระหว่างการบินด้วยแรงขับ เพราะจะช่วยบอกว่าจรวดจะโคจรอยู่ในวงโคจรใดของเคปเลอร์หากปิดแรงขับ
สำหรับวงโคจรที่ "ใกล้เคียงกับวงกลม" แนวคิด " เวกเตอร์ความเยื้องศูนย์ " ที่กำหนดไว้นั้นมีประโยชน์ จาก ( 53 ), ( 54 ) และ ( 56 ) จะได้ว่า

| 60 |

กล่าวคือ เป็นฟังก์ชันที่เรียบและสามารถหาอนุพันธ์ได้ของเวกเตอร์สถานะแม้ว่าสถานะนั้นจะสอดคล้องกับวงโคจรเป็นวงกลมก็ตาม

ดูเพิ่มเติม
- ปัญหาวัตถุสองชิ้น
- ปัญหาของเคปเลอร์
- กฎการเคลื่อนที่ของดาวเคราะห์ของเคปเลอร์
- วงโคจรวงรี
- วิถีโค้งไฮเปอร์โบลา
- วิถีโค้งพาราโบลา
- วิถีรัศมี
- การสร้างแบบจำลองวงโคจร
อ่านเพิ่มเติม
- เอลยาสเบิร์ก "ทฤษฎีการโคจรของดาวเทียมเทียมของโลก" โครงการแปลทางวิทยาศาสตร์ของอิสราเอล (1967)
- Bate, Roger; Mueller, Donald; White, Jerry (1971). พื้นฐานของดาราศาสตร์พลศาสตร์ . สำนักพิมพ์ Dover Publications, Inc., นิวยอร์ก. ISBN 0-486-60061-0.
- โคเปอร์นิคัส, นิโคเลาส์ (1952), "หนังสือเล่มที่ 1 บทที่ 4 การเคลื่อนที่ของเทหวัตถุบนท้องฟ้าเป็นไปอย่างสม่ำเสมอ เป็นวงกลม และคงอยู่ชั่วนิรันดร์ หรืออาจประกอบขึ้นจากการเคลื่อนที่แบบวงกลม", ว่าด้วยการโคจรของทรงกลมแห่งสวรรค์ , หนังสือสำคัญของโลกตะวันตก เล่มที่ 16, แปลโดย ชาร์ลส์ เกล็น วอลลิส, ชิคาโก: วิลเลียม เบนตัน, หน้า 497–838
ลิงก์ภายนอก
- แอปเพล็ต JAVA ที่แสดงภาพเคลื่อนไหวการโคจรของดาวเทียมในวงโคจรวงรีแบบเคปเลอร์รอบโลก โดยสามารถกำหนดค่ากึ่งแกนเอกและความเยื้องศูนย์กลางได้ตามต้องการ
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ วงโคจรของเคปเลอร์
ในกลศาสตร์ท้องฟ้าวงโคจรเคปเลอร์(หรือวงโคจรแบบเคปเลอร์ซึ่งตั้งชื่อตามโยฮันเนส เคปเลอร์ นักดาราศาสตร์ชาวเยอรมัน ) คือการเคลื่อนที่ของวัตถุหนึ่งเทียบกับอีกวัตถุหนึ่ง...
การแนะนำ
ตั้งแต่สมัยโบราณจนถึงศตวรรษที่ 16 และ 17 เชื่อกันว่าการเคลื่อนที่ของดาวเคราะห์เป็นไปตาม เส้นทาง วงกลม ที่สมบูรณ์แบบโดยมีศูนย์กลางอยู่ที่ดวงอาทิตย์ ตามที่นักปรัชญากรีกโบราณอย่าง อริสโตเติล และ ปโตเล มีสอนไว้...
การพัฒนากฎหมาย
ในปี ค.ศ. 1601 โยฮันเนส เคปเลอร์ ได้รับข้อมูลการสังเกตการณ์ดาวเคราะห์อย่างละเอียดถี่ถ้วนจาก ไทโค บรา เฮ เคปเลอร์ใช้เวลาห้าปีต่อมาในการพยายามปรับข้อมูลการสังเกตการณ์ดาว อังคาร ให้เข้ากับเส้นโค้งต่างๆ ในปี ค.ศ.
ไอแซค นิวตัน
ระหว่างปี ค.ศ. 1665 ถึง 1666 ไอแซค นิวตัน ได้พัฒนาแนวคิดหลายอย่างที่เกี่ยวข้องกับการเคลื่อนที่ แรงโน้มถ่วง และแคลคูลัสเชิงอนุพันธ์ อย่างไรก็ตาม แนวคิดเหล่านี้ไม่ได้ถูกตีพิมพ์จนกระทั่งปี ค.ศ.