ในกลศาสตร์ต่อเนื่อง ทฤษฎีความเครียดอนันต์ เป็นแนวทางทางคณิตศาสตร์ในการอธิบายการเสียรูป ของวัตถุแข็ง โดยถือว่าการกระจัด ของ อนุภาค วัสดุนั้น เล็กกว่ามาก (เล็กกว่า ในระดับอนันต์ ) เมื่อเทียบกับมิติใดๆ ที่เกี่ยวข้องของวัตถุ ดังนั้นจึงสามารถถือได้ว่ารูปทรงเรขาคณิตและคุณสมบัติเชิงโครงสร้างของวัสดุ (เช่นความหนาแน่น และความแข็ง ) ณ แต่ละจุดในอวกาศนั้นไม่เปลี่ยนแปลงไปจากการเสียรูป
ด้วยสมมติฐานนี้ สมการของกลศาสตร์ต่อเนื่องจึงง่ายขึ้นอย่างมาก แนวทางนี้อาจเรียกว่าทฤษฎีการเปลี่ยนรูปเล็กน้อย ทฤษฎีการกระจัดเล็กน้อย หรือทฤษฎีความชันของการกระจัดเล็กน้อย ซึ่งแตกต่างจากทฤษฎีความเครียดจำกัด ที่ใช้สมมติฐานตรงกันข้าม
ทฤษฎีความเครียดเล็กน้อยมีการประยุกต์ใช้อย่างกว้างขวางในด้านวิศวกรรมตัวอย่าง เช่น การวิเคราะห์ความเครียด พยายามทำนายพฤติกรรมของโครงสร้างที่สร้างจาก วัสดุ ยืดหยุ่น ที่ค่อนข้างแข็ง เช่นคอนกรีต และเหล็ก การวิเคราะห์ดังกล่าวสามารถใช้เพื่อลดการเสียรูปของการออกแบบโครงสร้างภายใต้ภาระ ทั่วไป อย่างไรก็ตาม การประมาณนี้ต้องใช้ความระมัดระวังในกรณีของวัตถุที่บางและยืดหยุ่นได้ เช่น แท่ง แผ่น และเปลือก ซึ่งมีแนวโน้มที่จะหมุนอย่างมีนัยสำคัญ ทำให้ผลลัพธ์ไม่น่าเชื่อถือ[ 1 ]
เทนเซอร์ความเครียดอนันต์ สำหรับการเสียรูปที่เล็กน้อยมากของวัตถุต่อเนื่อง ซึ่งเทนเซอร์เกรเดียนต์การกระจัด (เทนเซอร์อันดับ 2) มีค่าน้อยเมื่อเทียบกับหนึ่ง กล่าวคือเป็นไปได้ที่จะทำการหาค่าเชิงเส้นเชิงเรขาคณิตของเทนเซอร์ความเครียดจำกัดใดๆ ที่ใช้ในทฤษฎีความเครียดจำกัด เช่นเทนเซอร์ความเครียดจำกัดแบบลากรางจ์ เทนเซอร์ความเครียดจำกัดแบบออยเลอร์ ‖ ∇ คุณ ‖ ≪ 1 {\displaystyle \|\nabla \mathbf {u} \|\ll 1} อี {\displaystyle \mathbf {E} } อี {\displaystyle \mathbf {e} }
อี = 1 2 ( ∇ X คุณ + ( ∇ X คุณ ) ที + ( ∇ X คุณ ) ที ∇ X คุณ ) ≈ 1 2 ( ∇ X คุณ + ( ∇ X คุณ ) ที ) {\displaystyle \mathbf {E} ={\frac {1}{2}}\left(\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}+(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\nabla _{\mathbf {X} }\mathbf {u} \right)\ประมาณ {\frac {1}{2}}\left(\nabla _{\mathbf {X} }\mathbf {u} +(\nabla _{\mathbf {X} }\mathbf {u} )^{T}\right)} อี เค แอล = 1 2 ( ∂ ยู เค ∂ X แอล + ∂ ยู แอล ∂ X เค + ∂ ยู เอ็ม ∂ X เค ∂ ยู เอ็ม ∂ X แอล ) ≈ 1 2 ( ∂ ยู เค ∂ X แอล + ∂ ยู แอล ∂ X เค ) {\displaystyle E_{KL}={\frac {1}{2}}\left({\frac {\partial U_{K}}{\partial X_{L}}}+{\frac {\partial U_{L}}{\partial X_{K}}}+{\frac {\partial U_{M}}{\partial X_{K}}}{\frac {\partial U_{M}}{\partial X_{L}}}\right)\approx {\frac {1}{2}}\left({\frac {\partial U_{K}}{\partial X_{L}}}+{\frac {\partial U_{L}}{\partial X_{K}}}\right)} อี = 1 2 ( ∇ x คุณ + ( ∇ x คุณ ) ที − ∇ x คุณ ( ∇ x คุณ ) ที ) ≈ 1 2 ( ∇ x คุณ + ( ∇ x คุณ ) ที ) {\displaystyle \mathbf {e} ={\frac {1}{2}}\left(\nabla _{\mathbf {x} }\mathbf {u} +(\nabla _{\mathbf {x} }\mathbf {u} )^{T}-\nabla _{\mathbf {x} }\mathbf {u} (\nabla _{\mathbf {x} }\mathbf {u} )^{T}\right)\approx {\frac {1}{2}}\left(\nabla _{\mathbf {x} }\mathbf {u} +(\nabla _{\mathbf {x} }\mathbf {u} )^{T}\right)} e r s = 1 2 ( ∂ u r ∂ x s + ∂ u s ∂ x r − ∂ u k ∂ x r ∂ u k ∂ x s ) ≈ 1 2 ( ∂ u r ∂ x s + ∂ u s ∂ x r ) {\displaystyle e_{rs}={\frac {1}{2}}\left({\frac {\partial u_{r}}{\partial x_{s}}}+{\frac {\partial u_{s}}{\partial x_{r}}}-{\frac {\partial u_{k}}{\partial x_{r}}}{\frac {\partial u_{k}}{\partial x_{s}}}\right)\approx {\frac {1}{2}}\left({\frac {\partial u_{r}}{\partial x_{s}}}+{\frac {\partial u_{s}}{\partial x_{r}}}\right)}
การทำให้เป็นเชิงเส้นนี้หมายความว่าคำอธิบายแบบลากรางจ์และคำอธิบายแบบออยเลอร์นั้นใกล้เคียงกัน เนื่องจากมีความแตกต่างเพียงเล็กน้อยในพิกัดวัสดุและพิกัดเชิงพื้นที่ของจุดวัสดุที่กำหนดในตัวกลางต่อเนื่อง ดังนั้น ส่วนประกอบ ของเทนเซอร์เกรเดียนต์การกระจัดของวัสดุ และ ส่วนประกอบของ เทนเซอร์เกรเดียนต์การกระจัดเชิงพื้นที่ จึงใกล้เคียงกัน ดังนั้นเราจึงได้ หรือ โดยที่คือส่วนประกอบของเทนเซอร์ความเครียดขนาดเล็กมาก หรือที่เรียกว่าเทนเซอร์ความเครียดของโคชี เทนเซอร์ความเครียดเชิงเส้น หรือ เทน เซอร์ ความเครียดขนาดเล็ก E ≈ e ≈ ε = 1 2 ( ( ∇ u ) T + ∇ u ) {\displaystyle \mathbf {E} \approx \mathbf {e} \approx {\boldsymbol {\varepsilon }}={\frac {1}{2}}\left((\nabla \mathbf {u} )^{T}+\nabla \mathbf {u} \right)} E K L ≈ e r s ≈ ε i j = 1 2 ( u i , j + u j , i ) {\displaystyle E_{KL}\approx e_{rs}\approx \varepsilon _{ij}={\frac {1}{2}}\left(u_{i,j}+u_{j,i}\right)} ε i j {\displaystyle \varepsilon _{ij}} ε {\displaystyle {\boldsymbol {\varepsilon }}}
ε i j = 1 2 ( u i , j + u j , i ) = [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] = [ ∂ u 1 ∂ x 1 1 2 ( ∂ u 1 ∂ x 2 + ∂ u 2 ∂ x 1 ) 1 2 ( ∂ u 1 ∂ x 3 + ∂ u 3 ∂ x 1 ) 1 2 ( ∂ u 2 ∂ x 1 + ∂ u 1 ∂ x 2 ) ∂ u 2 ∂ x 2 1 2 ( ∂ u 2 ∂ x 3 + ∂ u 3 ∂ x 2 ) 1 2 ( ∂ u 3 ∂ x 1 + ∂ u 1 ∂ x 3 ) 1 2 ( ∂ u 3 ∂ x 2 + ∂ u 2 ∂ x 3 ) ∂ u 3 ∂ x 3 ] {\displaystyle {\begin{aligned}\varepsilon _{ij}&={\frac {1}{2}}\left(u_{i,j}+u_{j,i}\right)\\&={\begin{bmatrix}\varepsilon _{11}&\varepsilon _{12}&\varepsilon _{13}\\\varepsilon _{21}&\varepsilon _{22}&\varepsilon _{23}\\\varepsilon _{31}&\varepsilon _{32}&\varepsilon _{33}\\\end{bmatrix}}\\&={\begin{bmatrix}{\frac {\partial u_{1}}{\partial x_{1}}}&{\frac {1}{2}}\left({\frac {\partial u_{1}}{\partial x_{2}}}+{\frac {\partial u_{2}}{\partial x_{1}}}\right)&{\frac {1}{2}}\left({\frac {\partial u_{1}}{\partial x_{3}}}+{\frac {\partial u_{3}}{\partial x_{1}}}\right)\\{\frac {1}{2}}\left({\frac {\partial u_{2}}{\partial x_{1}}}+{\frac {\partial u_{1}}{\partial x_{2}}}\right)&{\frac {\partial u_{2}}{\partial x_{2}}}&{\frac {1}{2}}\left({\frac {\partial u_{2}}{\partial x_{3}}}+{\frac {\partial u_{3}}{\partial x_{2}}}\right)\\{\frac {1}{2}}\left({\frac {\partial u_{3}}{\partial x_{1}}}+{\frac {\partial u_{1}}{\partial x_{3}}}\right)&{\frac {1}{2}}\left({\frac {\partial u_{3}}{\partial x_{2}}}+{\frac {\partial u_{2}}{\partial x_{3}}}\right)&{\frac {\partial u_{3}}{\partial x_{3}}}\\\end{bmatrix}}\end{aligned}}} [ ε x x ε x y ε x z ε y x ε y y ε y z ε z x ε z y ε z z ] = [ ∂ u x ∂ x 1 2 ( ∂ u x ∂ y + ∂ u y ∂ x ) 1 2 ( ∂ u x ∂ z + ∂ u z ∂ x ) 1 2 ( ∂ u y ∂ x + ∂ u x ∂ y ) ∂ u y ∂ y 1 2 ( ∂ u y ∂ z + ∂ u z ∂ y ) 1 2 ( ∂ u z ∂ x + ∂ u x ∂ z ) 1 2 ( ∂ u z ∂ y + ∂ u y ∂ z ) ∂ u z ∂ z ] {\displaystyle {\begin{bmatrix}\varepsilon _{xx}&\varepsilon _{xy}&\varepsilon _{xz}\\\varepsilon _{yx}&\varepsilon _{yy}&\varepsilon _{yz}\\\varepsilon _{zx}&\varepsilon _{zy}&\varepsilon _{zz}\\\end{bmatrix}}={\begin{bmatrix}{\frac {\partial u_{x}}{\partial x}}&{\frac {1}{2}}\left({\frac {\partial u_{x}}{\partial y}}+{\frac {\partial u_{y}}{\partial x}}\right)&{\frac {1}{2}}\left({\frac {\partial u_{x}}{\partial z}}+{\frac {\partial u_{z}}{\partial x}}\right)\\{\frac {1}{2}}\left({\frac {\partial u_{y}}{\partial x}}+{\frac {\partial u_{x}}{\partial y}}\right)&{\frac {\partial u_{y}}{\partial y}}&{\frac {1}{2}}\left({\frac {\partial u_{y}}{\partial z}}+{\frac {\partial u_{z}}{\partial y}}\right)\\{\frac {1}{2}}\left({\frac {\partial u_{z}}{\partial x}}+{\frac {\partial u_{x}}{\partial z}}\right)&{\frac {1}{2}}\left({\frac {\partial u_{z}}{\partial y}}+{\frac {\partial u_{y}}{\partial z}}\right)&{\frac {\partial u_{z}}{\partial z}}\\\end{bmatrix}}}
นอกจากนี้ เนื่องจากเกรเดียนต์การเปลี่ยนรูป สามารถแสดงได้เป็น โดยที่คือเทนเซอร์เอกลักษณ์อันดับสอง เราจึงได้ F = ∇ u + I {\displaystyle {\boldsymbol {F}}={\boldsymbol {\nabla }}\mathbf {u} +{\boldsymbol {I}}} I {\displaystyle {\boldsymbol {I}}} ε = 1 2 ( F T + F ) − I {\displaystyle {\boldsymbol {\varepsilon }}={\frac {1}{2}}\left({\boldsymbol {F}}^{T}+{\boldsymbol {F}}\right)-{\boldsymbol {I}}}
นอกจากนี้ จากนิพจน์ทั่วไป สำหรับเทนเซอร์ความเครียดจำกัดแบบลากรางจ์และออยเลอร์ เราจะได้ว่า E ( m ) = 1 2 m ( U 2 m − I ) = 1 2 m [ ( F T F ) m − I ] ≈ 1 2 m [ { ∇ u + ( ∇ u ) T + I } m − I ] ≈ ε e ( m ) = 1 2 m ( V 2 m − I ) = 1 2 m [ ( F F T ) m − I ] ≈ ε {\displaystyle {\begin{aligned}\mathbf {E} _{(m)}&={\frac {1}{2m}}(\mathbf {U} ^{2m}-{\boldsymbol {I}})={\frac {1}{2m}}[({\boldsymbol {F}}^{T}{\boldsymbol {F}})^{m}-{\boldsymbol {I}}]\approx {\frac {1}{2m}}[\{{\boldsymbol {\nabla }}\mathbf {u} +({\boldsymbol {\nabla }}\mathbf {u} )^{T}+{\boldsymbol {I}}\}^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\\\mathbf {e} _{(m)}&={\frac {1}{2m}}(\mathbf {V} ^{2m}-{\boldsymbol {I}})={\frac {1}{2m}}[({\boldsymbol {F}}{\boldsymbol {F}}^{T})^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\end{aligned}}}
การหาอนุพันธ์ทางเรขาคณิต รูปที่ 1. การเปลี่ยนรูปทางเรขาคณิตสองมิติขององค์ประกอบวัสดุขนาดเล็กมาก พิจารณาการเปลี่ยนรูปสองมิติของชิ้นส่วนวัสดุรูปสี่เหลี่ยมผืนผ้าขนาดเล็กมากที่มีขนาดตาม(รูปที่ 1) ซึ่งหลังจากเปลี่ยนรูปแล้วจะมีรูปร่างเป็นรูปสี่เหลี่ยมขนมเปียกปูน จากรูปทรงเรขาคณิตในรูปที่ 1 เราจะได้ว่า d x {\displaystyle dx} d y {\displaystyle dy}
a b ¯ = ( d x + ∂ u x ∂ x d x ) 2 + ( ∂ u y ∂ x d x ) 2 = d x 1 + 2 ∂ u x ∂ x + ( ∂ u x ∂ x ) 2 + ( ∂ u y ∂ x ) 2 {\displaystyle {\begin{aligned}{\overline {ab}}&={\sqrt {\left(dx+{\frac {\partial u_{x}}{\partial x}}dx\right)^{2}+\left({\frac {\partial u_{y}}{\partial x}}dx\right)^{2}}}\\&=dx{\sqrt {1+2{\frac {\partial u_{x}}{\partial x}}+\left({\frac {\partial u_{x}}{\partial x}}\right)^{2}+\left({\frac {\partial u_{y}}{\partial x}}\right)^{2}}}\\\end{aligned}}}
สำหรับค่าความชันการกระจัดที่เล็กมาก เช่นเราจะได้ว่า ‖ ∇ u ‖ ≪ 1 {\displaystyle \|\nabla \mathbf {u} \|\ll 1} a b ¯ ≈ d x + ∂ u x ∂ x d x {\displaystyle {\overline {ab}}\approx dx+{\frac {\partial u_{x}}{\partial x}}dx}
ความเครียดปกติ ในทิศทาง - ขององค์ประกอบสี่เหลี่ยมผืนผ้าถูกกำหนดโดย และเมื่อทราบว่าเราจึงได้ x {\displaystyle x} ε x = a b ¯ − A B ¯ A B ¯ {\displaystyle \varepsilon _{x}={\frac {{\overline {ab}}-{\overline {AB}}}{\overline {AB}}}} A B ¯ = d x {\displaystyle {\overline {AB}}=dx} ε x = ∂ u x ∂ x {\displaystyle \varepsilon _{x}={\frac {\partial u_{x}}{\partial x}}}
ในทำนองเดียวกัน ความเครียดปกติในทิศทาง x และทิศทาง y จะกลายเป็น y {\displaystyle y} z {\displaystyle z} ε y = ∂ u y ∂ y , ε z = ∂ u z ∂ z {\displaystyle \varepsilon _{y}={\frac {\partial u_{y}}{\partial y}}\quad ,\qquad \varepsilon _{z}={\frac {\partial u_{z}}{\partial z}}}
ความเครียดเฉือนทางวิศวกรรม หรือการเปลี่ยนแปลงมุมระหว่างเส้นวัสดุสองเส้นที่ตั้งฉากกันในตอนแรก ในกรณีนี้คือเส้นและถูกกำหนดดังนี้ A C ¯ {\displaystyle {\overline {AC}}} A B ¯ {\displaystyle {\overline {AB}}} γ x y = α + β {\displaystyle \gamma _{xy}=\alpha +\beta }
จากรูปทรงเรขาคณิตในรูปที่ 1 เราได้ว่า tan α = ∂ u y ∂ x d x d x + ∂ u x ∂ x d x = ∂ u y ∂ x 1 + ∂ u x ∂ x , tan β = ∂ u x ∂ y d y d y + ∂ u y ∂ y d y = ∂ u x ∂ y 1 + ∂ u y ∂ y {\displaystyle \tan \alpha ={\frac {{\dfrac {\partial u_{y}}{\partial x}}dx}{dx+{\dfrac {\partial u_{x}}{\partial x}}dx}}={\frac {\dfrac {\partial u_{y}}{\partial x}}{1+{\dfrac {\partial u_{x}}{\partial x}}}}\quad ,\qquad \tan \beta ={\frac {{\dfrac {\partial u_{x}}{\partial y}}dy}{dy+{\dfrac {\partial u_{y}}{\partial y}}dy}}={\frac {\dfrac {\partial u_{x}}{\partial y}}{1+{\dfrac {\partial u_{y}}{\partial y}}}}}
สำหรับการหมุนเล็กน้อย เช่นและเรา จะ ได้ และเช่นเดียวกัน สำหรับเกรเดียนต์การกระจัดเล็กน้อย เราจะได้ ดังนั้น โดยการสลับและและและจะสามารถแสดงได้ว่า α {\displaystyle \alpha } β {\displaystyle \beta } ≪ 1 {\displaystyle \ll 1} tan α ≈ α , tan β ≈ β {\displaystyle \tan \alpha \approx \alpha \quad ,\qquad \tan \beta \approx \beta } α = ∂ u y ∂ x , β = ∂ u x ∂ y {\displaystyle \alpha ={\frac {\partial u_{y}}{\partial x}}\quad ,\qquad \beta ={\frac {\partial u_{x}}{\partial y}}} γ x y = α + β = ∂ u y ∂ x + ∂ u x ∂ y {\displaystyle \gamma _{xy}=\alpha +\beta ={\frac {\partial u_{y}}{\partial x}}+{\frac {\partial u_{x}}{\partial y}}} x {\displaystyle x} y {\displaystyle y} u x {\displaystyle u_{x}} u y {\displaystyle u_{y}} γ x y = γ y x {\displaystyle \gamma _{xy}=\gamma _{yx}}
ในทำนองเดียวกัน สำหรับ ระนาบ - และ- เราก็มี y {\displaystyle y} z {\displaystyle z} x {\displaystyle x} z {\displaystyle z} γ y z = γ z y = ∂ u y ∂ z + ∂ u z ∂ y , γ z x = γ x z = ∂ u z ∂ x + ∂ u x ∂ z {\displaystyle \gamma _{yz}=\gamma _{zy}={\frac {\partial u_{y}}{\partial z}}+{\frac {\partial u_{z}}{\partial y}}\quad ,\qquad \gamma _{zx}=\gamma _{xz}={\frac {\partial u_{z}}{\partial x}}+{\frac {\partial u_{x}}{\partial z}}}
จะเห็นได้ว่าส่วนประกอบความเครียดเฉือนเทนเซอร์ของเทนเซอร์ความเครียดขนาดเล็กสามารถแสดงได้โดยใช้นิยามความเครียดทางวิศวกรรม ดังนี้ γ {\displaystyle \gamma } [ ε x x ε x y ε x z ε y x ε y y ε y z ε z x ε z y ε z z ] = [ ε x x γ x y / 2 γ x z / 2 γ y x / 2 ε y y γ y z / 2 γ z x / 2 γ z y / 2 ε z z ] {\displaystyle {\begin{bmatrix}\varepsilon _{xx}&\varepsilon _{xy}&\varepsilon _{xz}\\\varepsilon _{yx}&\varepsilon _{yy}&\varepsilon _{yz}\\\varepsilon _{zx}&\varepsilon _{zy}&\varepsilon _{zz}\\\end{bmatrix}}={\begin{bmatrix}\varepsilon _{xx}&\gamma _{xy}/2&\gamma _{xz}/2\\\gamma _{yx}/2&\varepsilon _{yy}&\gamma _{yz}/2\\\gamma _{zx}/2&\gamma _{zy}/2&\varepsilon _{zz}\\\end{bmatrix}}}
การตีความทางกายภาพ จากทฤษฎีความเครียดจำกัด เรามี d x 2 − d X 2 = d X ⋅ 2 E ⋅ d X or ( d x ) 2 − ( d X ) 2 = 2 E K L d X K d X L {\displaystyle d\mathbf {x} ^{2}-d\mathbf {X} ^{2}=d\mathbf {X} \cdot 2\mathbf {E} \cdot d\mathbf {X} \quad {\text{or}}\quad (dx)^{2}-(dX)^{2}=2E_{KL}\,dX_{K}\,dX_{L}}
สำหรับความเครียดที่เล็กน้อยมาก เราจะได้ว่า d x 2 − d X 2 = d X ⋅ 2 ε ⋅ d X or ( d x ) 2 − ( d X ) 2 = 2 ε K L d X K d X L {\displaystyle d\mathbf {x} ^{2}-d\mathbf {X} ^{2}=d\mathbf {X} \cdot 2\mathbf {\boldsymbol {\varepsilon }} \cdot d\mathbf {X} \quad {\text{or}}\quad (dx)^{2}-(dX)^{2}=2\varepsilon _{KL}\,dX_{K}\,dX_{L}}
เมื่อหารด้วยเราจะได้ ( d X ) 2 {\displaystyle (dX)^{2}} d x − d X d X d x + d X d X = 2 ε i j d X i d X d X j d X {\displaystyle {\frac {dx-dX}{dX}}{\frac {dx+dX}{dX}}=2\varepsilon _{ij}{\frac {dX_{i}}{dX}}{\frac {dX_{j}}{dX}}}
สำหรับการเสียรูปเล็กน้อย เราจะถือว่าดังนั้นพจน์ที่สองของด้านซ้ายมือจึงกลายเป็น: d x ≈ d X {\displaystyle dx\approx dX} d x + d X d X ≈ 2 {\displaystyle {\frac {dx+dX}{dX}}\approx 2}
จากนั้นเราจะได้ ว่า โดยที่เป็นเวกเตอร์หน่วยในทิศทางของและนิพจน์ทางด้านซ้ายมือคือความเครียดปกติ ในทิศทางของสำหรับกรณีเฉพาะของในทิศทาง นั่นคือเราจะได้ว่า d x − d X d X = ε i j N i N j = N ⋅ ε ⋅ N {\displaystyle {\frac {dx-dX}{dX}}=\varepsilon _{ij}N_{i}N_{j}=\mathbf {N} \cdot {\boldsymbol {\varepsilon }}\cdot \mathbf {N} } N i = d X i d X {\displaystyle N_{i}={\frac {dX_{i}}{dX}}} d X {\displaystyle d\mathbf {X} } e ( N ) {\displaystyle e_{(\mathbf {N} )}} N {\displaystyle \mathbf {N} } N {\displaystyle \mathbf {N} } X 1 {\displaystyle X_{1}} N = I 1 {\displaystyle \mathbf {N} =\mathbf {I} _{1}} e ( I 1 ) = I 1 ⋅ ε ⋅ I 1 = ε 11 . {\displaystyle e_{(\mathbf {I} _{1})}=\mathbf {I} _{1}\cdot {\boldsymbol {\varepsilon }}\cdot \mathbf {I} _{1}=\varepsilon _{11}.}
ในทำนองเดียวกัน สำหรับและเราสามารถหาค่าความเครียดปกติและตามลำดับได้ ดังนั้น องค์ประกอบแนวทแยงของเทนเซอร์ความเครียดอนันต์จึงเป็นค่าความเครียดปกติในทิศทางพิกัด N = I 2 {\displaystyle \mathbf {N} =\mathbf {I} _{2}} N = I 3 {\displaystyle \mathbf {N} =\mathbf {I} _{3}} ε 22 {\displaystyle \varepsilon _{22}} ε 33 {\displaystyle \varepsilon _{33}}
ถ้าเราเลือกใช้ระบบพิกัดตั้งฉากปกติ ( ) เราสามารถเขียนเทนเซอร์ในรูปของส่วนประกอบโดยสัมพันธ์กับเวกเตอร์ฐานเหล่านั้นได้ดังนี้ ในรูปแบบเมทริกซ์ เราสามารถเลือกใช้ระบบพิกัดตั้งฉากปกติอื่น ( ) แทนได้อย่างง่ายดาย ในกรณีนั้น ส่วนประกอบของเทนเซอร์จะแตกต่างกัน เช่น ส่วนประกอบของความเครียดในระบบพิกัดทั้งสองมีความสัมพันธ์กันโดย โดย ใช้หลักการบวกแบบไอน์สไตน์ สำหรับดัชนีที่ซ้ำกัน และ ในรูปแบบเมทริกซ์ หรือ e 1 , e 2 , e 3 {\displaystyle \mathbf {e} _{1},\mathbf {e} _{2},\mathbf {e} _{3}} ε = ∑ i = 1 3 ∑ j = 1 3 ε i j e i ⊗ e j {\displaystyle {\boldsymbol {\varepsilon }}=\sum _{i=1}^{3}\sum _{j=1}^{3}\varepsilon _{ij}\mathbf {e} _{i}\otimes \mathbf {e} _{j}} ε _ _ = [ ε 11 ε 12 ε 13 ε 12 ε 22 ε 23 ε 13 ε 23 ε 33 ] {\displaystyle {\underline {\underline {\boldsymbol {\varepsilon }}}}={\begin{bmatrix}\varepsilon _{11}&\varepsilon _{12}&\varepsilon _{13}\\\varepsilon _{12}&\varepsilon _{22}&\varepsilon _{23}\\\varepsilon _{13}&\varepsilon _{23}&\varepsilon _{33}\end{bmatrix}}} e ^ 1 , e ^ 2 , e ^ 3 {\displaystyle {\hat {\mathbf {e} }}_{1},{\hat {\mathbf {e} }}_{2},{\hat {\mathbf {e} }}_{3}} ε = ∑ i = 1 3 ∑ j = 1 3 ε ^ i j e ^ i ⊗ e ^ j ⟹ ε ^ _ _ = [ ε ^ 11 ε ^ 12 ε ^ 13 ε ^ 12 ε ^ 22 ε ^ 23 ε ^ 13 ε ^ 23 ε ^ 33 ] {\displaystyle {\boldsymbol {\varepsilon }}=\sum _{i=1}^{3}\sum _{j=1}^{3}{\hat {\varepsilon }}_{ij}{\hat {\mathbf {e} }}_{i}\otimes {\hat {\mathbf {e} }}_{j}\quad \implies \quad {\underline {\underline {\hat {\boldsymbol {\varepsilon }}}}}={\begin{bmatrix}{\hat {\varepsilon }}_{11}&{\hat {\varepsilon }}_{12}&{\hat {\varepsilon }}_{13}\\{\hat {\varepsilon }}_{12}&{\hat {\varepsilon }}_{22}&{\hat {\varepsilon }}_{23}\\{\hat {\varepsilon }}_{13}&{\hat {\varepsilon }}_{23}&{\hat {\varepsilon }}_{33}\end{bmatrix}}} ε ^ i j = ℓ i p ℓ j q ε p q {\displaystyle {\hat {\varepsilon }}_{ij}=\ell _{ip}~\ell _{jq}~\varepsilon _{pq}} ℓ i j = e ^ i ⋅ e j {\displaystyle \ell _{ij}={\hat {\mathbf {e} }}_{i}\cdot {\mathbf {e} }_{j}} ε ^ _ _ = L _ _ ε _ _ L _ _ T {\displaystyle {\underline {\underline {\hat {\boldsymbol {\varepsilon }}}}}={\underline {\underline {\mathbf {L} }}}~{\underline {\underline {\boldsymbol {\varepsilon }}}}~{\underline {\underline {\mathbf {L} }}}^{T}} [ ε ^ 11 ε ^ 12 ε ^ 13 ε ^ 21 ε ^ 22 ε ^ 23 ε ^ 31 ε ^ 32 ε ^ 33 ] = [ ℓ 11 ℓ 12 ℓ 13 ℓ 21 ℓ 22 ℓ 23 ℓ 31 ℓ 32 ℓ 33 ] [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] [ ℓ 11 ℓ 12 ℓ 13 ℓ 21 ℓ 22 ℓ 23 ℓ 31 ℓ 32 ℓ 33 ] T {\displaystyle {\begin{bmatrix}{\hat {\varepsilon }}_{11}&{\hat {\varepsilon }}_{12}&{\hat {\varepsilon }}_{13}\\{\hat {\varepsilon }}_{21}&{\hat {\varepsilon }}_{22}&{\hat {\varepsilon }}_{23}\\{\hat {\varepsilon }}_{31}&{\hat {\varepsilon }}_{32}&{\hat {\varepsilon }}_{33}\end{bmatrix}}={\begin{bmatrix}\ell _{11}&\ell _{12}&\ell _{13}\\\ell _{21}&\ell _{22}&\ell _{23}\\\ell _{31}&\ell _{32}&\ell _{33}\end{bmatrix}}{\begin{bmatrix}\varepsilon _{11}&\varepsilon _{12}&\varepsilon _{13}\\\varepsilon _{21}&\varepsilon _{22}&\varepsilon _{23}\\\varepsilon _{31}&\varepsilon _{32}&\varepsilon _{33}\end{bmatrix}}{\begin{bmatrix}\ell _{11}&\ell _{12}&\ell _{13}\\\ell _{21}&\ell _{22}&\ell _{23}\\\ell _{31}&\ell _{32}&\ell _{33}\end{bmatrix}}^{T}}
ตัวแปรคงที่ของความเครียด การดำเนินการบางอย่างกับเทนเซอร์ความเครียดให้ผลลัพธ์เดียวกันโดยไม่คำนึงถึงว่าใช้ระบบพิกัดเชิงตั้งฉากใดในการแสดงส่วนประกอบของความเครียด ผลลัพธ์ของการดำเนินการเหล่านี้เรียกว่าค่าคงที่ความเครียด ค่าคง ที่ความเครียดที่ใช้กันทั่วไปมากที่สุด ได้แก่ ในแง่ของส่วนประกอบ I 1 = t r ( ε ) I 2 = 1 2 { [ t r ( ε ) ] 2 − t r ( ε 2 ) } I 3 = det ( ε ) {\displaystyle {\begin{aligned}I_{1}&=\mathrm {tr} ({\boldsymbol {\varepsilon }})\\I_{2}&={\tfrac {1}{2}}\{[\mathrm {tr} ({\boldsymbol {\varepsilon }})]^{2}-\mathrm {tr} ({\boldsymbol {\varepsilon }}^{2})\}\\I_{3}&=\det({\boldsymbol {\varepsilon }})\end{aligned}}} I 1 = ε 11 + ε 22 + ε 33 I 2 = ε 11 ε 22 + ε 22 ε 33 + ε 33 ε 11 − ε 12 2 − ε 23 2 − ε 31 2 I 3 = ε 11 ( ε 22 ε 33 − ε 23 2 ) − ε 12 ( ε 21 ε 33 − ε 23 ε 31 ) + ε 13 ( ε 21 ε 32 − ε 22 ε 31 ) {\displaystyle {\begin{aligned}I_{1}&=\varepsilon _{11}+\varepsilon _{22}+\varepsilon _{33}\\I_{2}&=\varepsilon _{11}\varepsilon _{22}+\varepsilon _{22}\varepsilon _{33}+\varepsilon _{33}\varepsilon _{11}-\varepsilon _{12}^{2}-\varepsilon _{23}^{2}-\varepsilon _{31}^{2}\\I_{3}&=\varepsilon _{11}(\varepsilon _{22}\varepsilon _{33}-\varepsilon _{23}^{2})-\varepsilon _{12}(\varepsilon _{21}\varepsilon _{33}-\varepsilon _{23}\varepsilon _{31})+\varepsilon _{13}(\varepsilon _{21}\varepsilon _{32}-\varepsilon _{22}\varepsilon _{31})\end{aligned}}}
สายพันธุ์หลัก สามารถแสดงได้ว่าสามารถหาพิกัดระบบ ( ) ได้ ซึ่งส่วนประกอบของเทนเซอร์ความเครียดคือ ส่วนประกอบของเทนเซอร์ความเครียดในระบบพิกัด ( ) เรียกว่าความเครียดหลัก และทิศทางเรียกว่าทิศทางของความเครียดหลัก เนื่องจากไม่มีส่วนประกอบของความเครียดเฉือนในระบบพิกัดนี้ ความเครียดหลักจึงแสดงถึงการยืดสูงสุดและต่ำสุดของปริมาตรองค์ประกอบ n 1 , n 2 , n 3 {\displaystyle \mathbf {n} _{1},\mathbf {n} _{2},\mathbf {n} _{3}} ε _ _ = [ ε 1 0 0 0 ε 2 0 0 0 ε 3 ] ⟹ ε = ε 1 n 1 ⊗ n 1 + ε 2 n 2 ⊗ n 2 + ε 3 n 3 ⊗ n 3 {\displaystyle {\underline {\underline {\boldsymbol {\varepsilon }}}}={\begin{bmatrix}\varepsilon _{1}&0&0\\0&\varepsilon _{2}&0\\0&0&\varepsilon _{3}\end{bmatrix}}\quad \implies \quad {\boldsymbol {\varepsilon }}=\varepsilon _{1}\mathbf {n} _{1}\otimes \mathbf {n} _{1}+\varepsilon _{2}\mathbf {n} _{2}\otimes \mathbf {n} _{2}+\varepsilon _{3}\mathbf {n} _{3}\otimes \mathbf {n} _{3}} n 1 , n 2 , n 3 {\displaystyle \mathbf {n} _{1},\mathbf {n} _{2},\mathbf {n} _{3}} n i {\displaystyle \mathbf {n} _{i}}
หากเราทราบส่วนประกอบของเทนเซอร์ความเครียดในระบบพิกัดตั้งฉากใดๆ เราสามารถหาความเครียดหลักได้โดยใช้การแยกส่วนค่าลักษณะเฉพาะ ซึ่งกำหนดโดยการแก้ระบบสมการ ระบบสมการนี้เทียบเท่ากับการหาเวกเตอร์ที่เทนเซอร์ความเครียดกลายเป็นการยืดบริสุทธิ์โดยไม่มีส่วนประกอบของการเฉือน ( ε _ _ − ε i I _ _ ) n i = 0 _ {\displaystyle ({\underline {\underline {\boldsymbol {\varepsilon }}}}-\varepsilon _{i}~{\underline {\underline {\mathbf {I} }}})~\mathbf {n} _{i}={\underline {\mathbf {0} }}} n i {\displaystyle \mathbf {n} _{i}}
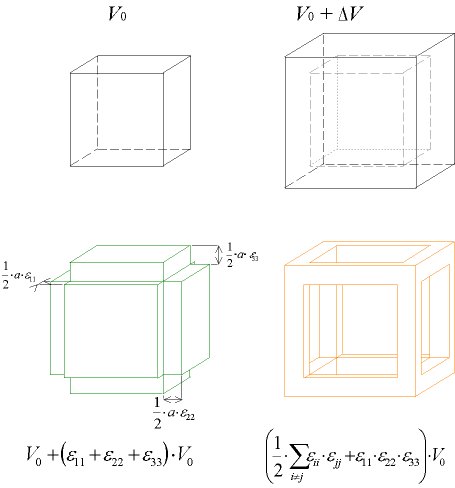
ความเครียดเชิงปริมาตร ความเครียดเชิงปริมาตร หรือที่เรียกว่าความเครียดโดยรวม คือการเปลี่ยนแปลงสัมพัทธ์ของปริมาตรที่เกิดขึ้นจากการขยายตัว การบีบอัด มันคือค่าคงที่ความเครียดแรก หรือร่องรอย แรก ของเทนเซอร์: อันที่จริง ถ้าเราพิจารณาลูกบาศก์ที่มีความยาวขอบa มันจะเป็นลูกบาศก์เสมือนหลังจากการเปลี่ยนรูป (การเปลี่ยนแปลงของมุมไม่ทำให้ปริมาตรเปลี่ยนแปลง) โดยมีมิติและV 0 = a 3 ดังนั้น เมื่อเราพิจารณาการเปลี่ยนรูปขนาดเล็ก ดังนั้นจึงได้สูตรนี้ δ = Δ V V 0 = I 1 = ε 11 + ε 22 + ε 33 {\displaystyle \delta ={\frac {\Delta V}{V_{0}}}=I_{1}=\varepsilon _{11}+\varepsilon _{22}+\varepsilon _{33}} a ⋅ ( 1 + ε 11 ) × a ⋅ ( 1 + ε 22 ) × a ⋅ ( 1 + ε 33 ) {\displaystyle a\cdot (1+\varepsilon _{11})\times a\cdot (1+\varepsilon _{22})\times a\cdot (1+\varepsilon _{33})} Δ V V 0 = ( 1 + ε 11 + ε 22 + ε 33 + ε 11 ⋅ ε 22 + ε 11 ⋅ ε 33 + ε 22 ⋅ ε 33 + ε 11 ⋅ ε 22 ⋅ ε 33 ) ⋅ a 3 − a 3 a 3 {\displaystyle {\frac {\Delta V}{V_{0}}}={\frac {\left(1+\varepsilon _{11}+\varepsilon _{22}+\varepsilon _{33}+\varepsilon _{11}\cdot \varepsilon _{22}+\varepsilon _{11}\cdot \varepsilon _{33}+\varepsilon _{22}\cdot \varepsilon _{33}+\varepsilon _{11}\cdot \varepsilon _{22}\cdot \varepsilon _{33}\right)\cdot a^{3}-a^{3}}{a^{3}}}} 1 ≫ ε i i ≫ ε i i ⋅ ε j j ≫ ε 11 ⋅ ε 22 ⋅ ε 33 {\displaystyle 1\gg \varepsilon _{ii}\gg \varepsilon _{ii}\cdot \varepsilon _{jj}\gg \varepsilon _{11}\cdot \varepsilon _{22}\cdot \varepsilon _{33}}
ในกรณีของการเฉือนบริสุทธิ์ เราจะเห็นว่าปริมาตรไม่มีการเปลี่ยนแปลง
เทนเซอร์เบี่ยงเบนความเครียด เทนเซอร์ความเครียดขนาดเล็กมากเช่นเดียวกับเทนเซอร์ความเค้นของโคชี สามารถแสดงได้ในรูปผลรวมของเทนเซอร์อีกสองตัว: ε i j {\displaystyle \varepsilon _{ij}}
เทนเซอร์ความเครียดเฉลี่ย หรือเทนเซอร์ความเครียดเชิงปริมาตร หรือ เทน เซอร์ความเครียดทรงกลม ที่เกี่ยวข้องกับการขยายตัวหรือการเปลี่ยนแปลงปริมาตร และε M δ i j {\displaystyle \varepsilon _{M}\delta _{ij}} ส่วนประกอบเบี่ยงเบนที่เรียกว่าเทนเซอร์เบี่ยงเบนความเครียด ซึ่งเกี่ยวข้องกับการบิดเบี้ยวε i j ′ {\displaystyle \varepsilon '_{ij}} ε i j = ε i j ′ + ε M δ i j {\displaystyle \varepsilon _{ij}=\varepsilon '_{ij}+\varepsilon _{M}\delta _{ij}} ε M {\displaystyle \varepsilon _{M}} ε M = ε k k 3 = ε 11 + ε 22 + ε 33 3 = 1 3 I 1 e {\displaystyle \varepsilon _{M}={\frac {\varepsilon _{kk}}{3}}={\frac {\varepsilon _{11}+\varepsilon _{22}+\varepsilon _{33}}{3}}={\tfrac {1}{3}}I_{1}^{e}}
เทนเซอร์ความเครียดส่วนเบี่ยงเบนสามารถหาได้โดยการลบเทนเซอร์ความเครียดเฉลี่ยออกจากเทนเซอร์ความเครียดขนาดเล็ก: ε i j ′ = ε i j − ε k k 3 δ i j [ ε 11 ′ ε 12 ′ ε 13 ′ ε 21 ′ ε 22 ′ ε 23 ′ ε 31 ′ ε 32 ′ ε 33 ′ ] = [ ε 11 ε 12 ε 13 ε 21 ε 22 ε 23 ε 31 ε 32 ε 33 ] − [ ε M 0 0 0 ε M 0 0 0 ε M ] = [ ε 11 − ε M ε 12 ε 13 ε 21 ε 22 − ε M ε 23 ε 31 ε 32 ε 33 − ε M ] {\displaystyle {\begin{aligned}\ \varepsilon '_{ij}&=\varepsilon _{ij}-{\frac {\varepsilon _{kk}}{3}}\delta _{ij}\\{\begin{bmatrix}\varepsilon '_{11}&\varepsilon '_{12}&\varepsilon '_{13}\\\varepsilon '_{21}&\varepsilon '_{22}&\varepsilon '_{23}\\\varepsilon '_{31}&\varepsilon '_{32}&\varepsilon '_{33}\\\end{bmatrix}}&={\begin{bmatrix}\varepsilon _{11}&\varepsilon _{12}&\varepsilon _{13}\\\varepsilon _{21}&\varepsilon _{22}&\varepsilon _{23}\\\varepsilon _{31}&\varepsilon _{32}&\varepsilon _{33}\\\end{bmatrix}}-{\begin{bmatrix}\varepsilon _{M}&0&0\\0&\varepsilon _{M}&0\\0&0&\varepsilon _{M}\\\end{bmatrix}}\\&={\begin{bmatrix}\varepsilon _{11}-\varepsilon _{M}&\varepsilon _{12}&\varepsilon _{13}\\\varepsilon _{21}&\varepsilon _{22}-\varepsilon _{M}&\varepsilon _{23}\\\varepsilon _{31}&\varepsilon _{32}&\varepsilon _{33}-\varepsilon _{M}\\\end{bmatrix}}\\\end{aligned}}}
ความเครียดทรงแปดเหลี่ยม ให้ ( ) เป็นทิศทางของความเครียดหลักทั้งสาม ระนาบแปดเหลี่ยม คือระนาบที่เวกเตอร์ตั้งฉากทำมุมเท่ากันกับทิศทางหลักทั้งสามความเครียดเฉือน ทางวิศวกรรม บนระนาบแปดเหลี่ยมเรียกว่าความเครียดเฉือนแปดเหลี่ยม และกำหนดโดย โดย ที่เป็นความเครียดหลัก n 1 , n 2 , n 3 {\displaystyle \mathbf {n} _{1},\mathbf {n} _{2},\mathbf {n} _{3}} γ o c t = 2 3 ( ε 1 − ε 2 ) 2 + ( ε 2 − ε 3 ) 2 + ( ε 3 − ε 1 ) 2 {\displaystyle \gamma _{\mathrm {oct} }={\tfrac {2}{3}}{\sqrt {(\varepsilon _{1}-\varepsilon _{2})^{2}+(\varepsilon _{2}-\varepsilon _{3})^{2}+(\varepsilon _{3}-\varepsilon _{1})^{2}}}} ε 1 , ε 2 , ε 3 {\displaystyle \varepsilon _{1},\varepsilon _{2},\varepsilon _{3}}
ความเครียดปกติ บนระนาบทรงแปดเหลี่ยมกำหนดโดย ε o c t = 1 3 ( ε 1 + ε 2 + ε 3 ) {\displaystyle \varepsilon _{\mathrm {oct} }={\tfrac {1}{3}}(\varepsilon _{1}+\varepsilon _{2}+\varepsilon _{3})}
ความเครียดที่เทียบเท่ากัน ปริมาณสเกลาร์ที่เรียกว่าความเครียดสมมูล หรือ ความเครียดสมมูลของฟอน มิเซส มักใช้เพื่ออธิบายสถานะความเครียดในของแข็ง มีคำจำกัดความของความเครียดสมมูลหลายแบบที่พบได้ในเอกสารทางวิชาการ คำจำกัดความที่ใช้กันทั่วไปในเอกสารเกี่ยวกับความยืดหยุ่น คือ ปริมาณนี้เป็นงานที่สัมพันธ์กับความเค้นสมมูลซึ่งกำหนดไว้ดังนี้ ε e q = 2 3 ε d e v : ε d e v = 2 3 ε i j d e v ε i j d e v ; ε d e v = ε − 1 3 t r ( ε ) I {\displaystyle \varepsilon _{\mathrm {eq} }={\sqrt {{\tfrac {2}{3}}{\boldsymbol {\varepsilon }}^{\mathrm {dev} }:{\boldsymbol {\varepsilon }}^{\mathrm {dev} }}}={\sqrt {{\tfrac {2}{3}}\varepsilon _{ij}^{\mathrm {dev} }\varepsilon _{ij}^{\mathrm {dev} }}}~;~~{\boldsymbol {\varepsilon }}^{\mathrm {dev} }={\boldsymbol {\varepsilon }}-{\tfrac {1}{3}}\mathrm {tr} ({\boldsymbol {\varepsilon }})~{\boldsymbol {I}}} σ e q = 3 2 σ d e v : σ d e v {\displaystyle \sigma _{\mathrm {eq} }={\sqrt {{\tfrac {3}{2}}{\boldsymbol {\sigma }}^{\mathrm {dev} }:{\boldsymbol {\sigma }}^{\mathrm {dev} }}}}
สมการความเข้ากันได้ สำหรับส่วนประกอบความเครียดที่กำหนดไว้สมการเทนเซอร์ความเครียดแสดงถึงระบบสมการเชิงอนุพันธ์หกสมการสำหรับการกำหนดส่วนประกอบการกระจัดสามส่วนซึ่งทำให้ได้ระบบที่มีสมการเกินจำนวนตัวแปร ดังนั้น โดยทั่วไปจึงไม่มีคำตอบสำหรับส่วนประกอบความเครียดที่เลือกโดยพลการ ด้วยเหตุนี้ จึง มีการกำหนด ข้อจำกัดบางประการที่เรียกว่าสมการความเข้ากันได้ ไว้กับส่วนประกอบความเครียด เมื่อเพิ่มสมการความเข้ากันได้สามสมการ จำนวนสมการอิสระจะลดลงเหลือสามสมการ ซึ่งตรงกับจำนวนส่วนประกอบการกระจัดที่ไม่ทราบค่า ข้อจำกัดเหล่านี้เกี่ยวกับเทนเซอร์ความเครียดถูกค้นพบโดยSaint-Venant และเรียกว่า " สมการความเข้ากันได้ของ Saint Venant " ε i j {\displaystyle \varepsilon _{ij}} u i , j + u j , i = 2 ε i j {\displaystyle u_{i,j}+u_{j,i}=2\varepsilon _{ij}} u i {\displaystyle u_{i}}
ฟังก์ชันความเข้ากันได้ทำหน้าที่รับประกันว่าฟังก์ชันการกระจัดต่อเนื่องจะมีค่าเดียวหากมองภาพตัวกลางยืดหยุ่นเป็นชุดของลูกบาศก์ขนาดเล็กมากในสภาวะที่ไม่มีแรงดึง หลังจากที่ตัวกลางมีแรงดึงแล้ว เทนเซอร์แรงดึงใดๆ ก็อาจไม่ทำให้ลูกบาศก์ที่บิดเบี้ยวเหล่านั้นยังคงประกอบเข้าด้วยกันได้โดยไม่ทับซ้อนกัน u i {\displaystyle u_{i}}
ในการเขียนแบบดัชนี สมการความเข้ากันได้จะแสดงดังนี้ ε i j , k m + ε k m , i j − ε i k , j m − ε j m , i k = 0 {\displaystyle \varepsilon _{ij,km}+\varepsilon _{km,ij}-\varepsilon _{ik,jm}-\varepsilon _{jm,ik}=0}
ในสัญลักษณ์ทางวิศวกรรม
∂ 2 ϵ x ∂ y 2 + ∂ 2 ϵ y ∂ x 2 = 2 ∂ 2 ϵ x y ∂ x ∂ y {\displaystyle {\frac {\partial ^{2}\epsilon _{x}}{\partial y^{2}}}+{\frac {\partial ^{2}\epsilon _{y}}{\partial x^{2}}}=2{\frac {\partial ^{2}\epsilon _{xy}}{\partial x\partial y}}} ∂ 2 ϵ y ∂ z 2 + ∂ 2 ϵ z ∂ y 2 = 2 ∂ 2 ϵ y z ∂ y ∂ z {\displaystyle {\frac {\partial ^{2}\epsilon _{y}}{\partial z^{2}}}+{\frac {\partial ^{2}\epsilon _{z}}{\partial y^{2}}}=2{\frac {\partial ^{2}\epsilon _{yz}}{\partial y\partial z}}} ∂ 2 ϵ x ∂ z 2 + ∂ 2 ϵ z ∂ x 2 = 2 ∂ 2 ϵ z x ∂ z ∂ x {\displaystyle {\frac {\partial ^{2}\epsilon _{x}}{\partial z^{2}}}+{\frac {\partial ^{2}\epsilon _{z}}{\partial x^{2}}}=2{\frac {\partial ^{2}\epsilon _{zx}}{\partial z\partial x}}} ∂ 2 ϵ x ∂ y ∂ z = ∂ ∂ x ( − ∂ ϵ y z ∂ x + ∂ ϵ z x ∂ y + ∂ ϵ x y ∂ z ) {\displaystyle {\frac {\partial ^{2}\epsilon _{x}}{\partial y\partial z}}={\frac {\partial }{\partial x}}\left(-{\frac {\partial \epsilon _{yz}}{\partial x}}+{\frac {\partial \epsilon _{zx}}{\partial y}}+{\frac {\partial \epsilon _{xy}}{\partial z}}\right)} ∂ 2 ϵ y ∂ z ∂ x = ∂ ∂ y ( ∂ ϵ y z ∂ x − ∂ ϵ z x ∂ y + ∂ ϵ x y ∂ z ) {\displaystyle {\frac {\partial ^{2}\epsilon _{y}}{\partial z\partial x}}={\frac {\partial }{\partial y}}\left({\frac {\partial \epsilon _{yz}}{\partial x}}-{\frac {\partial \epsilon _{zx}}{\partial y}}+{\frac {\partial \epsilon _{xy}}{\partial z}}\right)} ∂ 2 ϵ z ∂ x ∂ y = ∂ ∂ z ( ∂ ϵ y z ∂ x + ∂ ϵ z x ∂ y − ∂ ϵ x y ∂ z ) {\displaystyle {\frac {\partial ^{2}\epsilon _{z}}{\partial x\partial y}}={\frac {\partial }{\partial z}}\left({\frac {\partial \epsilon _{yz}}{\partial x}}+{\frac {\partial \epsilon _{zx}}{\partial y}}-{\frac {\partial \epsilon _{xy}}{\partial z}}\right)}
กรณีพิเศษ
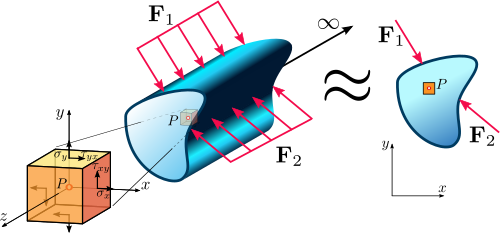
ความเครียดระนาบ สภาวะความเครียดระนาบในวัสดุต่อเนื่อง ในชิ้นส่วนทางวิศวกรรมจริงความเค้น (และความเครียด) เป็น เทนเซอร์ 3 มิติแต่ในโครงสร้างทรงปริซึม เช่น แท่งโลหะยาว ความยาวของโครงสร้างนั้นมากกว่ามิติอีกสองมิติมาก ความเครียดที่เกี่ยวข้องกับความยาว กล่าวคือ ความเครียดปกติและความเครียดเฉือน( ถ้าความยาวอยู่ในทิศทาง 3 มิติ) จะถูกจำกัดโดยวัสดุที่อยู่ใกล้เคียงและมีขนาดเล็กเมื่อเทียบกับความเครียดตามหน้าตัด ดังนั้น ความเครียดระนาบจึงเป็นการประมาณที่ยอมรับได้เทนเซอร์ความเครียด สำหรับความเครียดระนาบเขียนได้ดังนี้: โดยที่ขีดเส้นใต้สองเส้นแสดงถึง เทนเซอร์ อันดับสองสภาวะความเครียดนี้เรียกว่าความเครียดระนาบ เท นเซอร์ความเค้นที่สอดคล้องกันคือ: โดยที่ค่าที่ไม่เป็นศูนย์นั้นจำเป็นต่อการรักษาข้อจำกัด เทอมความเค้นนี้สามารถลบออกจากการวิเคราะห์ชั่วคราวเพื่อให้เหลือเพียงเทอมในระนาบเท่านั้น ซึ่งจะช่วยลดปัญหา 3 มิติให้กลายเป็นปัญหา 2 มิติที่ง่ายกว่ามาก ε 33 {\displaystyle \varepsilon _{33}} ε 13 {\displaystyle \varepsilon _{13}} ε 23 {\displaystyle \varepsilon _{23}} ε _ _ = [ ε 11 ε 12 0 ε 21 ε 22 0 0 0 0 ] {\displaystyle {\underline {\underline {\boldsymbol {\varepsilon }}}}={\begin{bmatrix}\varepsilon _{11}&\varepsilon _{12}&0\\\varepsilon _{21}&\varepsilon _{22}&0\\0&0&0\end{bmatrix}}} σ _ _ = [ σ 11 σ 12 0 σ 21 σ 22 0 0 0 σ 33 ] {\displaystyle {\underline {\underline {\boldsymbol {\sigma }}}}={\begin{bmatrix}\sigma _{11}&\sigma _{12}&0\\\sigma _{21}&\sigma _{22}&0\\0&0&\sigma _{33}\end{bmatrix}}} σ 33 {\displaystyle \sigma _{33}} ϵ 33 = 0 {\displaystyle \epsilon _{33}=0}
ความเครียดแอนติเพลน ความเครียดแอนติเพลน (Antiplane strain) เป็นอีกสภาวะความเครียดพิเศษที่สามารถเกิดขึ้นได้ในวัตถุ เช่น ในบริเวณใกล้กับดิสโลเคชันแบบเกลียว (screw dislocation ) เทนเซอร์ความเครียด สำหรับความเครียดแอนติเพลนมีค่าดังนี้ ε _ _ = [ 0 0 ε 13 0 0 ε 23 ε 13 ε 23 0 ] {\displaystyle {\underline {\underline {\boldsymbol {\varepsilon }}}}={\begin{bmatrix}0&0&\varepsilon _{13}\\0&0&\varepsilon _{23}\\\varepsilon _{13}&\varepsilon _{23}&0\end{bmatrix}}}
ความสัมพันธ์กับเทนเซอร์การหมุนอนันต์ เทนเซอร์ความเครียดขนาดเล็กมากถูกกำหนดโดย ดังนั้นเกรเดียนต์การกระจัดสามารถแสดงได้เป็น โดย ที่ ปริมาณคือเทนเซอร์การหมุนขนาดเล็กมาก หรือเทนเซอร์การกระจัดเชิงมุมขนาดเล็กมาก (เกี่ยวข้องกับเมทริกซ์การหมุนขนาดเล็กมาก สมมาตรแบบเฉียง สำหรับการเสียรูปขนาดเล็กมาก ส่วนประกอบสเกลาร์ของ จะเป็นไปตามเงื่อนไขโปรดทราบว่าเกรเดียนต์การกระจัดจะมีค่าน้อยก็ต่อเมื่อทั้ง เทนเซอร์ความเครียดและเทนเซอร์การหมุนมีขนาดเล็กมาก ε = 1 2 [ ∇ u + ( ∇ u ) T ] {\displaystyle {\boldsymbol {\varepsilon }}={\frac {1}{2}}[{\boldsymbol {\nabla }}\mathbf {u} +({\boldsymbol {\nabla }}\mathbf {u} )^{T}]} ∇ u = ε + W {\displaystyle {\boldsymbol {\nabla }}\mathbf {u} ={\boldsymbol {\varepsilon }}+{\boldsymbol {W}}} W := 1 2 [ ∇ u − ( ∇ u ) T ] {\displaystyle {\boldsymbol {W}}:={\frac {1}{2}}[{\boldsymbol {\nabla }}\mathbf {u} -({\boldsymbol {\nabla }}\mathbf {u} )^{T}]} W {\displaystyle {\boldsymbol {W}}} W {\displaystyle {\boldsymbol {W}}} | W i j | ≪ 1 {\displaystyle |W_{ij}|\ll 1}
เวกเตอร์แกน เทนเซอร์อันดับสองแบบสมมาตรเฉียงมีส่วนประกอบสเกลาร์อิสระสามส่วน ส่วนประกอบทั้งสามนี้ใช้ในการกำหนดเวกเตอร์แกน , , ดังต่อไปนี้ โดยที่คือสัญลักษณ์การเรียงสับเปลี่ยน ในรูปแบบเมทริก ซ์ เวกเตอร์แกนนี้เรียกอีกอย่างว่าเวกเตอร์การหมุนแบบอนันต์เวกเตอร์การหมุนมีความสัมพันธ์กับเกรเดียนต์การกระจัดโดยความสัมพันธ์ ในสัญกรณ์ดัชนี ถ้าและแล้ววัสดุจะหมุนแบบแข็งเกร็งโดยประมาณด้วยขนาดรอบเวกเตอร์ w {\displaystyle \mathbf {w} } W i j = − ϵ i j k w k ; w i = − 1 2 ϵ i j k W j k {\displaystyle W_{ij}=-\epsilon _{ijk}~w_{k}~;~~w_{i}=-{\tfrac {1}{2}}~\epsilon _{ijk}~W_{jk}} ϵ i j k {\displaystyle \epsilon _{ijk}} W _ _ = [ 0 − w 3 w 2 w 3 0 − w 1 − w 2 w 1 0 ] ; w _ = [ w 1 w 2 w 3 ] {\displaystyle {\underline {\underline {\boldsymbol {W}}}}={\begin{bmatrix}0&-w_{3}&w_{2}\\w_{3}&0&-w_{1}\\-w_{2}&w_{1}&0\end{bmatrix}}~;~~{\underline {\mathbf {w} }}={\begin{bmatrix}w_{1}\\w_{2}\\w_{3}\end{bmatrix}}} w = 1 2 ∇ × u {\displaystyle \mathbf {w} ={\tfrac {1}{2}}~{\boldsymbol {\nabla }}\times \mathbf {u} } w i = 1 2 ϵ i j k u k , j {\displaystyle w_{i}={\tfrac {1}{2}}~\epsilon _{ijk}~u_{k,j}} ‖ W ‖ ≪ 1 {\displaystyle \lVert {\boldsymbol {W}}\rVert \ll 1} ε = 0 {\displaystyle {\boldsymbol {\varepsilon }}={\boldsymbol {0}}} | w | {\displaystyle |\mathbf {w} |} w {\displaystyle \mathbf {w} }
ความสัมพันธ์ระหว่างเทนเซอร์ความเครียดและเวกเตอร์การหมุน เมื่อกำหนดสนามการกระจัดแบบต่อเนื่องที่มีค่าเดียวและเทนเซอร์ความเครียดขนาดเล็กที่สอดคล้องกันเราจะได้ (ดูอนุพันธ์เทนเซอร์ (กลศาสตร์ต่อเนื่อง) ) เนื่องจากการเปลี่ยนลำดับการหาอนุพันธ์ไม่ทำให้ผลลัพธ์เปลี่ยนแปลงดังนั้น ดังนั้น และ ด้วย u {\displaystyle \mathbf {u} } ε {\displaystyle {\boldsymbol {\varepsilon }}} ∇ × ε = e i j k ε l j , i e k ⊗ e l = 1 2 e i j k [ u l , j i + u j , l i ] e k ⊗ e l {\displaystyle {\boldsymbol {\nabla }}\times {\boldsymbol {\varepsilon }}=e_{ijk}~\varepsilon _{lj,i}~\mathbf {e} _{k}\otimes \mathbf {e} _{l}={\tfrac {1}{2}}~e_{ijk}~[u_{l,ji}+u_{j,li}]~\mathbf {e} _{k}\otimes \mathbf {e} _{l}} u l , j i = u l , i j {\displaystyle u_{l,ji}=u_{l,ij}} e i j k u l , j i = ( e 12 k + e 21 k ) u l , 12 + ( e 13 k + e 31 k ) u l , 13 + ( e 23 k + e 32 k ) u l , 32 = 0 {\displaystyle e_{ijk}u_{l,ji}=(e_{12k}+e_{21k})u_{l,12}+(e_{13k}+e_{31k})u_{l,13}+(e_{23k}+e_{32k})u_{l,32}=0} 1 2 e i j k u j , l i = ( 1 2 e i j k u j , i ) , l = ( 1 2 e k i j u j , i ) , l = w k , l {\displaystyle {\tfrac {1}{2}}~e_{ijk}~u_{j,li}=\left({\tfrac {1}{2}}~e_{ijk}~u_{j,i}\right)_{,l}=\left({\tfrac {1}{2}}~e_{kij}~u_{j,i}\right)_{,l}=w_{k,l}} ∇ × ε = w k , l e k ⊗ e l = ∇ w {\displaystyle {\boldsymbol {\nabla }}\times {\boldsymbol {\varepsilon }}=w_{k,l}~\mathbf {e} _{k}\otimes \mathbf {e} _{l}={\boldsymbol {\nabla }}\mathbf {w} }
ความสัมพันธ์ระหว่างเทนเซอร์การหมุนและเวกเตอร์การหมุน จากเอกลักษณ์สำคัญเกี่ยวกับเคิร์ลของเทนเซอร์ เราทราบว่าสำหรับสนามการกระจัดแบบต่อเนื่อง ที่ มีค่าเดียว เนื่องจากเรามี u {\displaystyle \mathbf {u} } ∇ × ( ∇ u ) = 0 . {\displaystyle {\boldsymbol {\nabla }}\times ({\boldsymbol {\nabla }}\mathbf {u} )={\boldsymbol {0}}.} ∇ u = ε + W {\displaystyle {\boldsymbol {\nabla }}\mathbf {u} ={\boldsymbol {\varepsilon }}+{\boldsymbol {W}}} ∇ × W = − ∇ × ε = − ∇ w . {\displaystyle {\boldsymbol {\nabla }}\times {\boldsymbol {W}}=-{\boldsymbol {\nabla }}\times {\boldsymbol {\varepsilon }}=-{\boldsymbol {\nabla }}\mathbf {w} .}
เทนเซอร์ความเครียดในพิกัดที่ไม่ใช่คาร์ทีเซียน
เทนเซอร์ความเครียดในพิกัดทรงกระบอก ในพิกัดทรงกระบอก ( ) เวกเตอร์การกระจัดสามารถเขียนได้ดังนี้ ส่วนประกอบของเทนเซอร์ความเครียดในระบบพิกัดทรงกระบอกกำหนดโดย: [ 2 ] r , θ , z {\displaystyle r,\theta ,z} u = u r e r + u θ e θ + u z e z {\displaystyle \mathbf {u} =u_{r}~\mathbf {e} _{r}+u_{\theta }~\mathbf {e} _{\theta }+u_{z}~\mathbf {e} _{z}} ε r r = ∂ u r ∂ r ε θ θ = 1 r ( ∂ u θ ∂ θ + u r ) ε z z = ∂ u z ∂ z ε r θ = 1 2 ( 1 r ∂ u r ∂ θ + ∂ u θ ∂ r − u θ r ) ε θ z = 1 2 ( ∂ u θ ∂ z + 1 r ∂ u z ∂ θ ) ε z r = 1 2 ( ∂ u r ∂ z + ∂ u z ∂ r ) {\displaystyle {\begin{aligned}\varepsilon _{rr}&={\cfrac {\partial u_{r}}{\partial r}}\\\varepsilon _{\theta \theta }&={\cfrac {1}{r}}\left({\cfrac {\partial u_{\theta }}{\partial \theta }}+u_{r}\right)\\\varepsilon _{zz}&={\cfrac {\partial u_{z}}{\partial z}}\\\varepsilon _{r\theta }&={\cfrac {1}{2}}\left({\cfrac {1}{r}}{\cfrac {\partial u_{r}}{\partial \theta }}+{\cfrac {\partial u_{\theta }}{\partial r}}-{\cfrac {u_{\theta }}{r}}\right)\\\varepsilon _{\theta z}&={\cfrac {1}{2}}\left({\cfrac {\partial u_{\theta }}{\partial z}}+{\cfrac {1}{r}}{\cfrac {\partial u_{z}}{\partial \theta }}\right)\\\varepsilon _{zr}&={\cfrac {1}{2}}\left({\cfrac {\partial u_{r}}{\partial z}}+{\cfrac {\partial u_{z}}{\partial r}}\right)\end{aligned}}}
เทนเซอร์ความเครียดในพิกัดทรงกลม พิกัดทรงกลม ( r , θ , φ ) ที่ใช้กันทั่วไปในวิชาฟิสิกส์ ได้แก่ระยะทางรัศมีr , มุมเชิงขั้วθ ( theta ) และมุมอะซิมุทัลφ ( phi ) โดยทั่วไปมักใช้สัญลักษณ์ρ ( rho ) แทนr ในพิกัดทรงกลม ( ) เวกเตอร์การกระจัดสามารถเขียนได้ดังนี้ ส่วนประกอบของเทนเซอร์ความเครียดในระบบพิกัดทรงกลมกำหนดโดย[ 2 ] r , θ , ϕ {\displaystyle r,\theta ,\phi } u = u r e r + u θ e θ + u ϕ e ϕ {\displaystyle \mathbf {u} =u_{r}~\mathbf {e} _{r}+u_{\theta }~\mathbf {e} _{\theta }+u_{\phi }~\mathbf {e} _{\phi }} ε r r = ∂ u r ∂ r ε θ θ = 1 r ( ∂ u θ ∂ θ + u r ) ε ϕ ϕ = 1 r sin θ ( ∂ u ϕ ∂ ϕ + u r sin θ + u θ cos θ ) ε r θ = 1 2 ( 1 r ∂ u r ∂ θ + ∂ u θ ∂ r − u θ r ) ε θ ϕ = 1 2 r ( 1 sin θ ∂ u θ ∂ ϕ + ∂ u ϕ ∂ θ − u ϕ cot θ ) ε ϕ r = 1 2 ( 1 r sin θ ∂ u r ∂ ϕ + ∂ u ϕ ∂ r − u ϕ r ) {\displaystyle {\begin{aligned}\varepsilon _{rr}&={\cfrac {\partial u_{r}}{\partial r}}\\\varepsilon _{\theta \theta }&={\cfrac {1}{r}}\left({\cfrac {\partial u_{\theta }}{\partial \theta }}+u_{r}\right)\\\varepsilon _{\phi \phi }&={\cfrac {1}{r\sin \theta }}\left({\cfrac {\partial u_{\phi }}{\partial \phi }}+u_{r}\sin \theta +u_{\theta }\cos \theta \right)\\\varepsilon _{r\theta }&={\cfrac {1}{2}}\left({\cfrac {1}{r}}{\cfrac {\partial u_{r}}{\partial \theta }}+{\cfrac {\partial u_{\theta }}{\partial r}}-{\cfrac {u_{\theta }}{r}}\right)\\\varepsilon _{\theta \phi }&={\cfrac {1}{2r}}\left({\cfrac {1}{\sin \theta }}{\cfrac {\partial u_{\theta }}{\partial \phi }}+{\cfrac {\partial u_{\phi }}{\partial \theta }}-u_{\phi }\cot \theta \right)\\\varepsilon _{\phi r}&={\cfrac {1}{2}}\left({\cfrac {1}{r\sin \theta }}{\cfrac {\partial u_{r}}{\partial \phi }}+{\cfrac {\partial u_{\phi }}{\partial r}}-{\cfrac {u_{\phi }}{r}}\right)\end{aligned}}}
ดูเพิ่มเติม
ลิงก์ภายนอก 
















![{\displaystyle {\begin{aligned}\mathbf {E} _{(m)}&={\frac {1}{2m}}(\mathbf {U} ^{2m}-{\boldsymbol {I}})={\frac {1}{2m}}[({\boldsymbol {F}}^{T}{\boldsymbol {F}})^{m}-{\boldsymbol {I}}]\approx {\frac {1}{2m}}[\{{\boldsymbol {\nabla }}\mathbf {u} +({\boldsymbol {\nabla }}\mathbf {u} )^{T}+{\boldsymbol {I}}\}^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\\\mathbf {e} _{(m)}&={\frac {1}{2m}}(\mathbf {V} ^{2m}-{\boldsymbol {I}})={\frac {1}{2m}}[({\boldsymbol {F}}{\boldsymbol {F}}^{T})^{m}-{\boldsymbol {I}}]\approx {\boldsymbol {\varepsilon }}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f23afe38e5f63d74050dbaf5d362b65b4da1ca0)























































![{\displaystyle {\begin{aligned}I_{1}&=\mathrm {tr} ({\boldสัญลักษณ์ {\varepsilon }})\\I_{2}&={\tfrac {1}{2}}\{[\mathrm {tr} ({\boldสัญลักษณ์ {\varepsilon }})]^{2}-\mathrm {tr} ({\boldสัญลักษณ์ {\varepsilon }}^{2})\}\\I_{3}&=\det({\boldสัญลักษณ์ {\varepsilon }})\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cdc12c6f3d7e5049f74857861c3178c3f6728d99)




































![{\displaystyle {\boldสัญลักษณ์ {\varepsilon }}={\frac {1}{2}}[{\boldสัญลักษณ์ {\nabla }}\mathbf {u} +({\boldสัญลักษณ์ {\nabla }}\mathbf {u} )^{T}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a120dd47853fdf623ed080096e75e2069e84c220)

![{\displaystyle {\boldsymbol {W}}:={\frac {1}{2}}[{\boldsymbol {\nabla }}\mathbf {u} -({\boldsymbol {\nabla }}\mathbf {u} )^{T}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/96f7c996edd7b15b9d61e5274b9927c5ca3e68dc)












![{\displaystyle {\boldสัญลักษณ์ {\nabla }}\times {\boldสัญลักษณ์ {\varepsilon }}=e_{ijk}~\varepsilon _{lj,i}~\mathbf {e} _{k}\otimes \mathbf {e} _{l}={\tfrac {1}{2}}~e_{ijk}~[u_{l,ji}+u_{j,li}]~\mathbf {e} _{k}\otimes \mathbf {e} _{l}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/13fbd0b77f6478a70d04b0f31759e5076ca30028)












