อ่าน 24 นาที
ระบบพิกัดเชิงขั้ว
ในทางคณิตศาสตร์ระบบพิกัดเชิงขั้วระบุจุด ที่กำหนด บนระนาบโดยใช้ระยะทางและมุมเป็นพิกัด สองตัว ได้แก่ ระยะทาง และ มุม
ระบบพิกัดเชิงขั้ว

ในทางคณิตศาสตร์ระบบพิกัดเชิงขั้วระบุจุด ที่กำหนด บนระนาบโดยใช้ระยะทางและมุมเป็นพิกัด สองตัว ได้แก่ ระยะทาง และ มุม
- ระยะห่างของจุดจากจุดอ้างอิงที่เรียกว่าขั้วและ
- ทิศทางของจุดจากขั้วโลกเมื่อเทียบกับทิศทางของแกนขั้วโลกซึ่ง เป็น รังสีที่ลากจากขั้วโลก
ระยะห่างจากขั้วเรียกว่าพิกัดรัศมีระยะทางรัศมีหรือเรียกง่ายๆ ว่ารัศมีและมุมเรียกว่าพิกัดเชิงมุมมุมขั้วหรือ มุม อะซิมุธ [ 1 ] ขั้วเปรียบเสมือนจุดกำเนิดในระบบพิกัดคาร์ทีเซียน
พิกัดเชิงขั้วเหมาะสมที่สุดในบริบทใดๆ ก็ตามที่ปรากฏการณ์ที่กำลังพิจารณานั้นเกี่ยวข้องกับทิศทางและความยาวจากจุดศูนย์กลางในระนาบ เช่นรูปทรงเกลียวระบบทางกายภาพในระนาบที่มีวัตถุเคลื่อนที่รอบจุดศูนย์กลาง หรือปรากฏการณ์ที่เกิดขึ้นจากจุดศูนย์กลาง มักจะง่ายต่อการจำลองและเข้าใจได้ง่ายกว่าเมื่อใช้พิกัดเชิงขั้ว
ระบบพิกัดเชิงขั้วถูกขยายไปสู่สามมิติในสองวิธี: ระบบพิกัดทรงกระบอกเพิ่มพิกัดระยะทางตัวที่สอง และระบบพิกัดทรงกลมเพิ่มพิกัดเชิงมุมตัวที่สอง
เกรกัวร์ เดอ แซงต์-วินเซนต์และโบนาเวนตูรา คาวาลิเอรีได้นำเสนอแนวคิดของระบบนี้โดยอิสระจากกันในช่วงกลางศตวรรษที่ 17 แม้ว่าคำว่า พิกัดเชิงขั้ว (polar coordinates)จะถูกยกให้เป็นผลงานของเกรโกริโอ ฟอนตานาในศตวรรษที่ 18 ก็ตาม แรงจูงใจเริ่มต้นในการนำระบบพิกัดเชิงขั้วมาใช้คือการศึกษาการเคลื่อนที่แบบวงกลมและ วง โคจร
ประวัติศาสตร์

แนวคิดเรื่องมุมและรัศมีนั้นถูกใช้โดยชนชาติโบราณในช่วงสหัสวรรษแรกก่อนคริสต์ศักราชแล้ว นักดาราศาสตร์ชาวกรีกฮิปปาร์คัส (190–120 ปีก่อนคริสต์ศักราช) ได้สร้างตาราง ฟังก์ชัน คอร์ดที่ให้ความยาวของคอร์ดสำหรับแต่ละมุม และมีการอ้างอิงถึงการใช้พิกัดเชิงขั้วของเขาในการกำหนดตำแหน่งของดาวฤกษ์[ 2 ]ในหนังสือ On Spiralsนักคณิตศาสตร์ชาวกรีกอาร์คิมิดีสได้อธิบายถึงเกลียวของเขาซึ่งเป็นฟังก์ชันที่มีรัศมีขึ้นอยู่กับมุม อย่างไรก็ตาม งานของชาวกรีกไม่ได้ขยายไปสู่ระบบพิกัดที่สมบูรณ์
ตั้งแต่ศตวรรษที่ 8 เป็นต้นมา นักดาราศาสตร์ได้พัฒนาวิธีการประมาณและคำนวณทิศทางไปยังเมกกะ ( กิบลัต ) และระยะทางจากตำแหน่งใดๆ บนโลก[ 3 ]ตั้งแต่ศตวรรษที่ 9 เป็นต้นมา พวกเขาใช้ตรีโกณมิติเชิงทรง กลม และ วิธี การฉายภาพแผนที่เพื่อกำหนดปริมาณเหล่านี้อย่างแม่นยำ การคำนวณโดยพื้นฐานแล้วคือการแปลงพิกัดขั้วโลกเส้นศูนย์สูตรของเมกกะ (เช่นลองจิจูดและละติจูด ) ไปเป็นพิกัดขั้วโลก (เช่น กิบลัตและระยะทาง) เทียบกับระบบที่มีเส้นเมริเดียนอ้างอิงเป็นวงกลมใหญ่ที่ผ่านตำแหน่งที่กำหนดและขั้วโลกของโลก และแกนขั้วโลกเป็นเส้นที่ผ่านตำแหน่งและจุดตรงข้าม[ 4 ]
มีบันทึกต่างๆ เกี่ยวกับการนำพิกัดเชิงขั้วมาใช้เป็นส่วนหนึ่งของระบบพิกัดอย่างเป็นทางการ ประวัติความเป็นมาทั้งหมดของเรื่องนี้อธิบายไว้ในหนังสือOrigin of Polar Coordinatesของศาสตราจารย์Julian Lowell Coolidge แห่ง มหาวิทยาลัยฮา ร์วาร์ ด นักคณิตศาสตร์จากคณะเยซูอิตGrégoire de Saint-VincentและBonaventura Cavalieri ชาวอิตาลี ได้นำแนวคิดนี้มาใช้โดยอิสระในช่วงกลางศตวรรษที่ 17 Saint-Vincent เขียนเกี่ยวกับเรื่องนี้เป็นการส่วนตัวในปี 1625 และตีพิมพ์ผลงานของเขาในปี 1647 ในขณะที่ Cavalieri ตีพิมพ์ผลงานของเขาในปี 1635 โดยมีฉบับแก้ไขปรากฏในปี 1653 Cavalieri เป็นคนแรกที่ใช้พิกัดเชิงขั้วเพื่อแก้ปัญหาที่เกี่ยวข้องกับพื้นที่ภายในเกลียวอาร์คิมีเดียน ต่อมา นักคณิตศาสตร์ชาวฝรั่งเศสBlaise Pascalได้ใช้พิกัดเชิงขั้วเพื่อคำนวณความยาวของส่วนโค้งพาราโบลา[ 5 ]
ในMethod of Fluxions (เขียนในปี 1671 ตีพิมพ์ในปี 1736) เซอร์ไอแซค นิวตัน นักคณิตศาสตร์ชาวอังกฤษ ได้ตรวจสอบการแปลงระหว่างพิกัดเชิงขั้ว ซึ่งเขาเรียกว่า "วิธีที่เจ็ด สำหรับเกลียว" และระบบพิกัดอื่นอีกเก้าระบบ[ 6 ]เขาได้รับการยกย่องว่าเป็นผู้ริเริ่มระบบพิกัดเชิงขั้วในรูปแบบเชิงวิเคราะห์ และเป็นผู้ริเริ่มพิกัดแบบไบโพลาร์ในความหมายที่เข้มงวด[ 7 ]ในวารสารActa Eruditorum (1691) ยาคอบ เบอร์นูลลี นักคณิตศาสตร์ชาวสวิส ได้ใช้ระบบที่มีจุดบนเส้นตรง เรียกว่าขั้วและแกนเชิงขั้วตามลำดับ พิกัดถูกระบุโดยระยะห่างจากขั้วและมุมจากแกนเชิงขั้วงานของเบอร์นูลลีขยายไปถึงการคำนวณรัศมีของความโค้งของเส้นโค้งที่แสดงในพิกัดเหล่านี้
คำว่าพิกัดเชิงขั้วได้รับการกล่าวอ้างว่าเป็นผลงานของเกรกอริโอ ฟอนทานาและถูกใช้โดยนักเขียนชาวอิตาลีในศตวรรษที่ 18 คำนี้ปรากฏในภาษาอังกฤษใน งานแปล แคลคูลัสเชิงอนุพันธ์และปริพันธ์ของลาครัวซ์ โดย จอร์จ พีค็ อก ในปี 1816 [ 8 ] [ 9 ]อเล็กซิส แคลโรต์เป็นคนแรกที่คิดถึงพิกัดเชิงขั้วในสามมิติ และเลออนฮาร์ด ออยเลอร์เป็นคนแรกที่พัฒนาพิกัดเหล่านั้นขึ้นมาจริง ๆ[ 5 ]
อนุสัญญา

พิกัดรัศมีมักจะแสดงด้วยหรือ( โร ) พิกัดเชิงมุมแสดงด้วย( ฟี ) ซึ่งกำหนดโดยมาตรฐานISO 31-11 (ปัจจุบันคือ 80000-2:2019 ) [ 10 ]หรือ( ทีตา ) ในเอกสารทางคณิตศาสตร์บ่อยครั้ง[ 11 ]




มุมในสัญกรณ์เชิงขั้วโดยทั่วไปจะแสดงเป็นองศาหรือเรเดียน (2 πเรเดียนเท่ากับ 360°) โดยทั่วไปแล้วองศาจะใช้ในการนำทาง การสำรวจและสาขาวิชาประยุกต์หลายสาขา ในขณะที่เรเดียนมักใช้ในคณิตศาสตร์และฟิสิกส์ เชิง คณิตศาสตร์[ 12 ]
มุมเชิงขั้วถูกกำหนดให้เริ่มต้นที่ 0° จากทิศทางอ้างอิงและจะเพิ่มขึ้นสำหรับการหมุนในทิศทางตามเข็มนาฬิกา (↻) หรือทวนเข็มนาฬิกา (↺) ตัวอย่างเช่น ในทางคณิตศาสตร์ ทิศทางอ้างอิงมักจะถูกวาดเป็นรังสีจากขั้วโลกในแนวนอนไปทางขวา และมุมเชิงขั้วจะเพิ่มขึ้นเป็นมุมบวกสำหรับการหมุนทวนเข็มนาฬิกา ในขณะที่ในการนำทาง ( ทิศทาง , ทิศทางเดินเรือ ) ทิศทาง 0° จะถูกวาดในแนวตั้งขึ้นไป และมุมจะเพิ่มขึ้นสำหรับการหมุนตามเข็มนาฬิกา มุมเชิงขั้วจะลดลงไปสู่ค่าลบสำหรับการหมุนในทิศทางตรงกันข้ามตามลำดับ
ความเป็นเอกลักษณ์ของพิกัดเชิงขั้ว
การเพิ่มจำนวนรอบ เต็ม (360°) ใดๆ ให้กับพิกัดเชิงมุมจะไม่เปลี่ยนแปลงทิศทางที่สอดคล้องกัน ในทำนองเดียวกัน พิกัดเชิงขั้วใดๆ ก็เหมือนกับพิกัดที่มีส่วนประกอบรัศมีเป็นลบและทิศทางตรงกันข้าม (การเพิ่ม 180° ให้กับมุมเชิงขั้ว) ดังนั้น จุดเดียวกันสามารถแสดงได้ด้วยพิกัดเชิงขั้วที่แตกต่างกันจำนวนอนันต์และโดยที่เป็นจำนวนเต็ม ใด ๆ[ 13 ]ยิ่งไปกว่านั้น ขั้วเองก็สามารถแสดงได้เป็นสำหรับมุมใดๆ[ 14 ]





ในกรณีที่จำเป็นต้องมีการแสดง แทนที่ไม่ซ้ำกันสำหรับจุดใดๆ นอกเหนือจากขั้ว มักจะจำกัดไว้ที่จำนวนบวก ( ) และช่วงหรือช่วงซึ่งในหน่วยเรเดียนคือหรือ[ 15 ] ข้อตกลงอีกประการหนึ่ง โดยอ้างอิงถึงโคโดเมน ปกติ ของฟังก์ชัน arctanคือการอนุญาตให้ค่าจริงที่ไม่เป็นศูนย์ใดๆ ของส่วนประกอบรัศมีและจำกัดมุมขั้วไว้ที่ ในทุกกรณี จะต้องเลือกมุมอะซิมุธที่ไม่ซ้ำกันสำหรับขั้วเช่น


![{\displaystyle (-180^{\circ },180^{\circ }]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52564e11cb8ecd24997d7929ef3ff9a87052b335)

![{\displaystyle (-\pi ,\pi ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7fbb1843079a9df3d3bbcce3249bb2599790de9c)
![{\displaystyle (-90^{\circ },90^{\circ }]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/14f9812826a015ccca5d98ad77828227b2c1304c)


การแปลงระหว่างพิกัดเชิงขั้วและพิกัดคาร์ทีเซียน
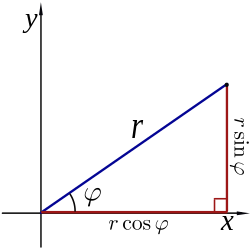
พิกัดเชิงขั้วและสามารถแปลงเป็นพิกัดคาร์ทีเซียนได้โดยใช้ฟังก์ชันตรีโกณมิติของไซน์และโคไซน์ตามลำดับ: [ 11 ]



พิกัดคาร์ทีเซียนและสามารถแปลงเป็นพิกัดเชิงขั้วและได้ โดยที่และอยู่ในช่วงโดย: [ 16 ] โดยที่atan2เป็นรูปแบบทั่วไปของ ฟังก์ชัน arctangentที่กำหนดเป็น



หากคำนวณค่าr ก่อนตามวิธีข้างต้น สูตรสำหรับ φ นี้ สามารถเขียนได้ง่ายขึ้นโดยใช้ ฟังก์ชัน arccosine :

จำนวนเชิงซ้อน
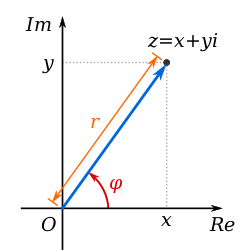
จำนวนเชิงซ้อนประกอบด้วยจำนวนจริงและรวมถึงจำนวนจินตนาการซึ่งสามารถเขียนได้เป็น จำนวนเชิงซ้อนทุกจำนวนแสดงถึงจุดในระนาบเชิงซ้อนซึ่งสามารถแสดงได้โดยการระบุพิกัดคาร์ทีเซียนของจุด (เรียกว่ารูปแบบสี่เหลี่ยมหรือคาร์ทีเซียน) หรือพิกัดเชิงขั้วของจุด (เรียกว่ารูปแบบเชิงขั้ว) [ 17 ]


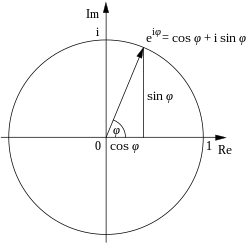
ในรูปแบบเชิงขั้ว พิกัดระยะทางและมุมมักจะเรียกว่าขนาดของจำนวนหรือโมดูลัสและอาร์กิวเมนต์ตามลำดับ ซึ่งสามารถหาได้จากจำนวนเชิงซ้อนที่แสดงในรูปแบบสี่เหลี่ยมผืนผ้าเป็น ในรูปแบบเชิงขั้วโดยการแทนที่และ: [ 17 ] นิพจน์สุดท้ายได้มาจากสูตรของออยเลอร์โดยที่คือจำนวนของออยเลอร์ประมาณ 2.718 และ—แสดงในหน่วยเรเดียน— คือค่าหลักของฟังก์ชันจำนวนเชิงซ้อนarg ที่ ใช้กับ[ 18 ]ในการแปลงระหว่างรูปแบบสี่เหลี่ยมผืนผ้าและเชิงขั้วของจำนวนเชิงซ้อน สามารถใช้สูตรการแปลงที่ให้ไว้ข้างต้นได้ เทียบเท่ากับcis —ฟังก์ชันที่แสดงถึง—และสัญลักษณ์มุม :






สำหรับการดำเนินการคูณ หารยกกำลังและถอดราก ของจำนวนเชิงซ้อน โดยทั่วไป แล้วการทำงานกับจำนวนเชิงซ้อนที่แสดงในรูปพิกัดเชิงขั้วจะง่ายกว่าในรูปพิกัดสี่เหลี่ยม จากกฎการยกกำลัง:
- การคูณ:
- แผนก:
- การยกกำลังหรือสูตรของเดอมัววร์ :
- การถอนราก หรือรากหลัก:



![{\displaystyle {\sqrt[{n}]{re^{i\varphi }}}={\sqrt[{n}]{r}}e^{i\varphi \over n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9702297c60884f24c748553ecc7246eccf95a448)
สมการเชิงขั้วของเส้นโค้ง



สมการที่กำหนดเส้นโค้งระนาบที่แสดงในพิกัดเชิงขั้วเรียกว่าสมการเชิงขั้วในหลายกรณี สมการดังกล่าวสามารถระบุได้ง่ายๆ โดยการกำหนดrเป็นฟังก์ชันของφเส้นโค้งที่ได้จะประกอบด้วยจุดในรูปแบบ ( r ( φ ), φ ) และสามารถพิจารณาได้ว่าเป็นกราฟของฟังก์ชันเชิงขั้วrโปรดสังเกตว่า ในทางตรงกันข้ามกับพิกัดคาร์ทีเซียน ตัวแปรอิสระφคือ รายการ ที่สองในคู่ ลำดับ
รูปแบบสมมาตร ที่แตกต่างกัน สามารถอนุมานได้จากสมการของฟังก์ชันเชิงขั้วr :
- ถ้าr (− φ ) = r ( φ )เส้นโค้งจะสมมาตรกับรังสีแนวนอน (0°/180°)
- ถ้าr ( π − φ ) = r ( φ )มันจะสมมาตรเกี่ยวกับรังสีแนวตั้ง (90°/270°):
- ถ้าr ( φ − α) = r ( φ )มันจะสมมาตรแบบหมุนตามเข็มนาฬิกาและทวนเข็มนาฬิกาโดยมีมุม α รอบขั้ว
เนื่องจากระบบพิกัดเชิงขั้วมีลักษณะเป็นวงกลม เส้นโค้งหลายเส้นจึงสามารถอธิบายได้ด้วยสมการเชิงขั้วที่ค่อนข้างง่าย ในขณะที่รูปแบบคาร์ทีเซียนนั้นซับซ้อนกว่ามาก เส้นโค้งที่รู้จักกันดีที่สุด ได้แก่ เส้นโค้งกุหลาบเชิงขั้ว เส้นโค้งเกลียวอาร์คิมีเดียน เส้นโค้งเลมนิสเคท เส้น โค้งลิมาซงและ เส้น โค้ง หัวใจ
สำหรับวงกลม เส้นตรง และวงกลมแสดงพิกัดเชิงขั้วด้านล่างนั้น เป็นที่เข้าใจได้ว่าไม่มีข้อจำกัดใดๆ เกี่ยวกับขอบเขตและช่วงของเส้นโค้ง
วงกลม

สมการทั่วไปของวงกลมที่มีจุดศูนย์กลางอยู่ที่และรัศมีaคือ


สามารถลดรูปได้หลายวิธีเพื่อให้สอดคล้องกับกรณีที่เฉพาะ เจาะจงมากขึ้น เช่น สมการ สำหรับวงกลมที่มีจุดศูนย์กลางอยู่ที่ขั้วและรัศมีa [ 19 ]

เมื่อr 0 = aหรือจุดกำเนิดอยู่บนวงกลม สมการจะกลายเป็น

โดยทั่วไปแล้ว สมการสามารถแก้หาค่าr ได้ ซึ่งจะได้ ผลลัพธ์เป็น คำตอบที่มีเครื่องหมายลบอยู่หน้าเครื่องหมายรากที่สองจะให้เส้นโค้งเดียวกัน

ภาคตัดกรวย
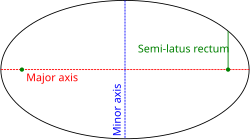
ภาคตัดกรวยที่มีจุดโฟกัสจุดหนึ่งอยู่ที่ขั้วและอีกจุดหนึ่งอยู่บนเส้นตรง 0° (เพื่อให้แกนหลัก ของภาคตัดกรวย อยู่ตามแนวแกนขั้ว) กำหนดโดย: โดยที่คือค่าความเยื้องศูนย์และคือค่ากึ่งลาตัสเรกตัม (ระยะตั้งฉากที่จุดโฟกัสจากแกนหลักไปยังเส้นโค้ง) ถ้าสมการนี้กำหนดไฮเปอร์โบลาถ้าจะกำหนดพาราโบลาและถ้าจะกำหนดวงรีกรณีพิเศษของวงรีคือวงกลมที่มีรัศมี







เส้น
เส้นรัศมี (เส้นที่ลากผ่านขั้วโลก) แสดงด้วยสมการ โดยที่คือมุมเงยของเส้น นั่นคือโดยที่คือความชันของเส้นในระบบพิกัดคาร์ทีเซียน เส้นที่ไม่ใช่เส้นรัศมีที่ตัดกับเส้นรัศมี ใน แนวตั้งฉากที่จุดมีสมการ






กล่าวอีกนัยหนึ่งคือ จุดที่เส้นสัมผัสตัดกับวงกลมสมมติที่มีรัศมี

กุหลาบขั้วโลก

ดอกกุหลาบโพลาร์เป็นเส้นโค้งทางคณิตศาสตร์ที่มีลักษณะคล้ายดอกไม้กลีบ และสามารถแสดงได้เป็นสมการโพลาร์สองแบบที่แตกต่างกัน: [ 20 ] รูปแบบโคไซน์และไซน์ไม่เท่ากัน แต่ความแตกต่างเป็นเพียงการหมุนของเส้นโค้งที่ได้ ทั้งสองเป็นกรณีพิเศษของr ( φ ) = a cos( kφ + γ )โดยที่γกำหนดเฟสและเทียบเท่ากับการหมุน ถ้าkเป็นจำนวนเต็ม สมการเหล่านี้จะสร้าง ดอกกุหลาบที่มี kกลีบ ถ้าkเป็นเลขคี่หรือดอกกุหลาบที่มี 2k กลีบถ้าkเป็นเลขคู่[ 21 ]ถ้าkเป็นจำนวนตรรกยะ แต่ไม่ใช่จำนวนเต็ม อาจเกิดรูปร่างคล้ายดอกกุหลาบได้ แต่มีกลีบที่ซ้อนทับกัน โปรดทราบว่าสมการเหล่านี้ไม่เคยกำหนดดอกกุหลาบที่มี 2, 6, 10, 14 กลีบ ฯลฯ ตัวแปรa แทนความยาวหรือแอมพลิจูดของกลีบดอกกุหลาบโดยตรง ในขณะที่kเกี่ยวข้องกับความถี่เชิงพื้นที่ ของ กลีบ

เกลียวอาร์คิมีเดียน

เกลียวอาร์คิมีดีสเป็นเกลียวที่อาร์คิมีดีส ค้นพบ ซึ่งสามารถแสดงได้ด้วยสมการเชิงขั้วอย่างง่าย โดยแสดงด้วยสมการ การเปลี่ยนค่าพารามิเตอร์aจะทำให้เกลียวหมุนไป ในขณะที่bควบคุมระยะห่างระหว่างแขน ซึ่งสำหรับเกลียวที่กำหนดจะมีค่าคงที่เสมอ เกลียวอาร์คิมีดีสมีแขนสองแขน แขนหนึ่งสำหรับφ > 0และอีกแขนหนึ่งสำหรับφ < 0แขนทั้งสองเชื่อมต่อกันอย่างราบเรียบที่ขั้ว ถ้าa = 0การสะท้อนภาพของแขนข้างหนึ่งผ่านเส้น 90°/270° จะได้แขนอีกข้างหนึ่ง เส้นโค้งนี้มีความโดดเด่นในฐานะที่เป็นหนึ่งในเส้นโค้งแรกๆ ต่อจากภาคตัดกรวยที่ได้รับการอธิบายในตำราทางคณิตศาสตร์ และเป็นตัวอย่างสำคัญของเส้นโค้งที่นิยามได้ดีที่สุดด้วยสมการเชิงขั้ว

ควอดราทริกซ์

ควอดราทริกซ์ในควอดแรนต์แรกคือเส้นโค้งที่มีขนาดเท่ากับเศษส่วนของวงกลมหนึ่งในสี่ส่วนที่มีรัศมีกำหนดโดยรัศมีที่ผ่านจุดบนเส้นโค้ง เนื่องจากเศษส่วนนี้คือ: [ 22 ]เส้นโค้งจึงกำหนดโดย




จุดตัดของเส้นโค้งเชิงขั้วสองเส้น
กราฟของฟังก์ชันเชิงขั้วสองฟังก์ชันและมีจุดตัดที่เป็นไปได้สามประเภท:


- ในจุดกำเนิด ถ้าสมการและมีอย่างน้อยหนึ่งคำตอบต่อสมการ
- จุดทั้งหมดที่เป็นคำตอบของสมการโดยที่เป็นจำนวนเต็ม
- จุดทั้งหมดที่เป็นคำตอบของสมการโดยที่เป็นจำนวนเต็ม


![{\displaystyle [g(\theta _{i}),\theta _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819)




แคลคูลัส
แคลคูลัสสามารถนำไปใช้กับสมการที่แสดงในพิกัดเชิงขั้วได้[ 23 ] [ 24 ]
ในส่วนนี้ พิกัดเชิงมุมφจะแสดงในหน่วยเรเดียน ซึ่งเป็นหน่วยที่นิยมใช้กันโดยทั่วไปในการคำนวณแคลคูลัส
แคลคูลัสเชิงอนุพันธ์
โดยใช้x = r cos φและy = r sin φเราสามารถหาความสัมพันธ์ระหว่างอนุพันธ์ในพิกัดคาร์ทีเซียนและพิกัดเชิงขั้วได้ สำหรับฟังก์ชันu ( x , y ) ที่กำหนดให้ จะได้ว่า (โดยการคำนวณอนุพันธ์รวม ) หรือ
![{\displaystyle {\begin{aligned}r{\frac {du}{dr}}&=r{\frac {\partial u}{\partial x}}\cos \varphi +r{\frac {\partial u}{\partial y}}\sin \varphi =x{\frac {\partial u}{\partial x}}+y{\frac {\partial u}{\partial y}},\\[2pt]{\frac {du}{d\varphi }}&=-{\frac {\partial u}{\partial x}}r\sin \varphi +{\frac {\partial u}{\partial y}}r\cos \varphi =-y{\frac {\partial u}{\partial x}}+x{\frac {\partial u}{\partial y}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01d876b55918333fa5b3792a72f5254b82b86c63)
ดังนั้น เราจึงได้สูตรดังต่อไปนี้:
![{\displaystyle {\begin{aligned}r{\frac {d}{dr}}&=x{\frac {\partial }{\partial x}}+y{\frac {\partial }{\partial y}}\\[2pt]{\frac {d}{d\varphi }}&=-y{\frac {\partial }{\partial x}}+x{\frac {\partial }{\partial y}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f6d6d1a9e05c093275ecaf66033a4298e41fe1d)
โดยใช้การแปลงพิกัดผกผัน ความสัมพันธ์ผกผันที่คล้ายคลึงกันสามารถหาได้ระหว่างอนุพันธ์ เมื่อกำหนดฟังก์ชันu ( r , φ ) แล้ว จะได้ว่า หรือ
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {\partial r}{\partial x}}+{\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\partial x}},\\[2pt]{\frac {du}{dy}}&={\frac {\partial u}{\partial r}}{\frac {\partial r}{\partial y}}+{\frac {\partial u}{\partial \varphi }}{\frac {\partial \varphi }{\partial y}},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f446e4f0df07ead889d7039cec3301472fc1f9ea)
![{\displaystyle {\begin{aligned}{\frac {du}{dx}}&={\frac {\partial u}{\partial r}}{\frac {x}{\sqrt {x^{2}+y^{2}}}}-{\frac {\partial u}{\partial \varphi }}{\frac {y}{x^{2}+y^{2}}}\\[2pt]&=\cos \varphi {\frac {\partial u}{\partial r}}-{\frac {1}{r}}\sin \varphi {\frac {\partial u}{\partial \varphi }},\\[2pt]{\frac {du}{dy}}&={\frac {\partial u}{\partial r}}{\frac {y}{\sqrt {x^{2}+y^{2}}}}+{\frac {\partial u}{\partial \varphi }}{\frac {x}{x^{2}+y^{2}}}\\[2pt]&=\sin \varphi {\frac {\partial u}{\partial r}}+{\frac {1}{r}}\cos \varphi {\frac {\partial u}{\partial \varphi }}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8dcc66ee6a6250cc206f488bb56f976a9a8bd2e8)
ดังนั้น เราจึงได้สูตรต่อไปนี้:
![{\displaystyle {\begin{aligned}{\frac {d}{dx}}&=\cos \varphi {\frac {\partial }{\partial r}}-{\frac {1}{r}}\sin \varphi {\frac {\partial }{\partial \varphi }}\\[2pt]{\frac {d}{dy}}&=\sin \varphi {\frac {\partial }{\partial r}}+{\frac {1}{r}}\cos \varphi {\frac {\partial }{\partial \varphi }}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a08bfe016a4d8e15a933032d077bcdf8c49d41e)
ในการหาค่าความชันคาร์ทีเซียนของเส้นสัมผัสกับเส้นโค้งเชิงขั้วr ( φ ) ณ จุดใดๆ เส้นโค้งนั้นจะต้องถูกแสดงออกมาในรูปของระบบสมการพาราเมตริกก่อน

เมื่อทำการหาอนุพันธ์ของสมการทั้งสองเทียบกับφจะได้
![{\displaystyle {\begin{aligned}{\frac {dx}{d\varphi }}&=r'(\varphi )\cos \varphi -r(\varphi )\sin \varphi \\[2pt]{\frac {dy}{d\varphi }}&=r'(\varphi )\sin \varphi +r(\varphi )\cos \varphi .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)
การหารสมการที่สองด้วยสมการแรกจะให้ค่าความชันคาร์ทีเซียนของเส้นสัมผัสของเส้นโค้งที่จุด: [ 25 ]


สำหรับสูตรที่มีประโยชน์อื่นๆ เช่น ไดเวอร์เจนซ์ เกรเดียนต์ และลาปลาเซียนในพิกัดเชิงขั้ว โปรดดูที่ พิกัดโค้ง
แคลคูลัสเชิงอินทิกรัล
ความยาวส่วนโค้ง
ความยาวส่วนโค้ง (ความยาวของส่วนของเส้นตรง) ที่กำหนดโดยฟังก์ชันเชิงขั้ว หาได้จากการอินทิเกรตเหนือเส้นโค้งr ( φ ) ให้Lแทนความยาวนี้ตามเส้นโค้งที่เริ่มต้นจากจุดAไปยังจุดBโดยที่จุดเหล่านี้สอดคล้องกับφ = aและφ = bโดยที่0 < b − a < 2π ความยาวของLหาได้จากอินทิกรัลต่อไปนี้
![{\displaystyle L=\int _{a}^{b}{\sqrt {\left[r(\varphi )\right]^{2}+\left[{\tfrac {dr(\varphi )}{d\varphi }}\right]^{2}}}d\varphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)
พื้นที่

ให้Rแทนบริเวณที่ล้อมรอบด้วยเส้นโค้งr ( φ ) และรังสีφ = aและφ = bโดยที่0 < b − a ≤ 2π แล้วพื้นที่ของRคือ
![{\displaystyle {\frac {1}{2}}\int _{a}^{b}\left[r(\varphi )\right]^{2}\,d\varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)

ผลลัพธ์นี้สามารถหาได้ดังต่อไปนี้ ขั้นแรก ช่วง[ a , b ]จะถูกแบ่งออกเป็นnช่วงย่อย โดยที่nเป็นจำนวนเต็มบวก ดังนั้น Δφ ซึ่งเป็นขนาดของมุมในแต่ละช่วงย่อย จะเท่ากับb − a (ขนาดของมุมทั้งหมดของช่วง) หารด้วยnซึ่งเป็นจำนวนช่วงย่อย สำหรับแต่ละช่วงย่อยi = 1, 2, ..., nให้φiเป็นจุดกึ่งกลางของช่วงย่อย และสร้างส่วนของวงกลมที่มีจุดศูนย์กลางอยู่ที่ขั้ว รัศมีr ( φi )มุมศูนย์กลาง Δφ และ ความ ยาวส่วนโค้งr ( φi ) Δφ พื้นที่ของส่วนของ วงกลม ที่สร้างขึ้นแต่ละ ส่วนจึงเท่ากับ ดังนั้น พื้นที่ทั้งหมดของส่วนของวงกลมทั้งหมดคือ
![{\displaystyle \pi \left[r(\varphi _{i})\right]^{2}\cdot {\frac {\Delta \varphi }{2\pi }}={\frac {1}{2}}\left[r(\varphi _{i})\right]^{2}\Delta \varphi .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b95a520492f4da6e9cebb30acc9ea9ae1d93053d)

เมื่อจำนวนช่วงย่อยnเพิ่มขึ้น การประมาณพื้นที่ก็จะดีขึ้น เมื่อn → ∞ผลรวมจะกลายเป็นผลรวมรีมันน์สำหรับปริพันธ์ข้างต้น
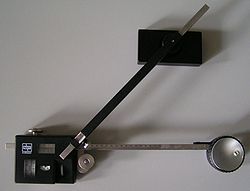
อุปกรณ์เชิงกลที่ใช้คำนวณปริพันธ์พื้นที่คือแพลนิมิเตอร์ซึ่งวัดพื้นที่ของรูปทรงเรขาคณิตบนระนาบโดยการลากเส้นตามรูปทรงนั้น: วิธีนี้จำลองการหาปริพันธ์ในพิกัดเชิงขั้วโดยการเพิ่มข้อต่อเพื่อให้กลไกเชื่อมโยง 2 องค์ประกอบนั้น สอดคล้องกับทฤษฎีบทของกรีนโดยแปลงปริพันธ์เชิงขั้วกำลังสองให้เป็นปริพันธ์เชิงเส้น
การสรุปพื้นที่
เมื่อใช้พิกัดคาร์ทีเซียนพื้นที่ขนาดเล็กมากสามารถคำนวณได้เป็นdA = dx dyกฎการแทนที่สำหรับอินทิกรัลหลายตัวระบุว่า เมื่อใช้พิกัดอื่น จะต้องพิจารณาดีเทอร์มิแนนต์ของเมทริกซ์ จาโคเบียนของสูตรการแปลงพิกัดด้วย
![{\displaystyle J=\det {\frac {\partial (x,y)}{\partial (r,\varphi )}}={\begin{vmatrix}{\frac {\partial x}{\partial r}}&{\frac {\partial x}{\partial \varphi }}\\[2pt]{\frac {\partial y}{\partial r}}&{\frac {\partial y}{\partial \varphi }}\end{vmatrix}}={\begin{vmatrix}\cos \varphi &-r\sin \varphi \\\sin \varphi &r\cos \varphi \end{vmatrix}}=r\cos ^{2}\varphi +r\sin ^{2}\varphi =r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)
ดังนั้น พื้นที่ในพิกัดเชิงขั้วจึงสามารถเขียนได้ดังนี้

ฟังก์ชันที่กำหนดในพิกัดเชิงขั้ว สามารถหาปริพันธ์ได้ดังนี้:

ในที่นี้Rคือบริเวณเดียวกันกับข้างต้น กล่าวคือ บริเวณที่ล้อมรอบด้วยเส้นโค้งr ( φ ) และรังสีφ = aและφ = bสูตรสำหรับพื้นที่ของRได้มาจากการกำหนดให้fเท่ากับ 1 เสมอ



การประยุกต์ใช้ผลลัพธ์นี้ที่น่าประหลาดใจยิ่งกว่านั้นก็คืออินทิกรัลแบบเกาส์เซียน :

แคลคูลัสเวกเตอร์
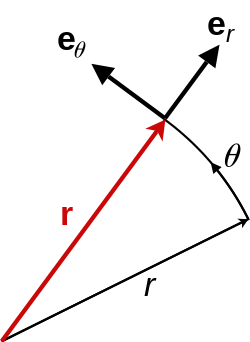
แคลคูลัสเวกเตอร์สามารถนำไปใช้กับพิกัดเชิงขั้วได้เช่นกัน สำหรับการเคลื่อนที่ในระนาบ ให้เป็นเวกเตอร์ตำแหน่ง( r cos ( φ ), r sin( φ ))โดยที่rและφขึ้นอยู่กับเวลาt

เรากำหนดฐานออร์โทนอร์มอลที่มีเวกเตอร์หน่วยสามตัว ได้แก่ทิศทางรัศมี ทิศทางตามขวาง และทิศทางตั้งฉากทิศทางรัศมีถูกกำหนดโดยการทำให้เป็นเวกเตอร์ หน่วย : ทิศทางรัศมีและทิศทางความเร็วครอบคลุมระนาบการเคลื่อนที่ซึ่งทิศทางตั้งฉากกับระนาบ นั้น แสดงด้วยสัญลักษณ์: ทิศทางตามขวางตั้งฉากกับทั้งทิศทางรัศมีและทิศทางตั้งฉาก:




จากนั้น ตำแหน่งและความเร็วสามารถแสดงได้ดังต่อไปนี้ โดยอัตราเชิงมุมจะต้องอยู่ในหน่วยเรเดียนต่อวินาที (หรือพหุคูณของหน่วยนั้น) ไม่ใช่องศาต่อวินาที ความเร่งสามารถแสดงได้ดังนี้: สมการนี้ได้มาจากการหาอนุพันธ์ของฟังก์ชันและอนุพันธ์ของเวกเตอร์ฐานหน่วย
![{\displaystyle {\begin{aligned}\mathbf {r} &=(x,\ y)=r(\cos \varphi ,\ \sin \varphi )=r{\hat {\mathbf {r} }}\ ,\\[1.5ex]{\dot {\mathbf {r} }}&=\left({\dot {x}},\ {\dot {y}}\right)={\dot {r}}(\cos \varphi ,\ \sin \varphi )+r{\dot {\varphi }}(-\sin \varphi ,\ \cos \varphi )={\dot {r}}{\hat {\mathbf {r} }}+r{\dot {\varphi }}{\hat {\boldสัญลักษณ์ {\varphi }}}\ ,\\[1.5ex]\end{ชิด}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4c8b09a50773b6cb0d4cb5d7731e7c2a7a2bbb9b)

![{\displaystyle {\begin{aligned}{\ddot {\mathbf {r} }}&=\left({\ddot {x}},\ {\ddot {y}}\right)\\[1ex]&={\ddot {r}}(\cos \varphi ,\ \sin \varphi )+2{\dot {r}}{\dot {\varphi }}(-\sin \varphi ,\ \cos \varphi )+r{\ddot {\varphi }}(-\sin \varphi ,\ \cos \varphi )-r{\dot {\varphi }}^{2}(\cos \varphi ,\ \sin \varphi )\\[1ex]&=\left({\ddot {r}}-r{\dot {\varphi }}^{2}\right){\hat {\mathbf {r} }}+\left(r{\ddot {\varphi }}+2{\dot {r}}{\dot {\varphi }}\right){\hat {\boldสัญลักษณ์ {\varphi }}}\\[1ex]&=\left({\ddot {r}}-r{\dot {\varphi }}^{2}\right){\hat {\mathbf {r} }}+{\frac {1}{r}}\;{\frac {d}{dt}}\left(r^{2}{\dot {\varphi }}\right){\hat {\boldสัญลักษณ์ {\varphi }}}.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a38c1f4809e1ea07a7472137a8f1fc921d1f6735)
สำหรับเส้นโค้งใน 2 มิติ โดยที่พารามิเตอร์คือสมการก่อนหน้านี้ จะลดรูปเหลือดังนี้:
![{\displaystyle {\begin{aligned}\mathbf {r} &=r(\theta ){\hat {\mathbf {e} }__{r}\\[1ex]{\frac {d\mathbf {r} }{d\theta }}&={\frac {dr}{d\theta }}{\hat {\mathbf {e} }__{r}+r{\hat {\mathbf {e} }__{\theta }\\[1ex]{\frac {d^{2}\mathbf {r} }{d\theta ^{2}}}&=\left({\frac {d^{2}r}{d\theta ^{2}}}-r\right){\hat {\mathbf {e} }__{r}+2{\frac {dr}{d\theta }}{\hat {\mathbf {e} }}_{\theta }\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9d9039dbb7d1cbbeaa89ea91f72e26e8ac748d2c)
เงื่อนไขแรงเหวี่ยงและแรงโคริโอลิส
บางครั้ง คำนี้เรียกว่าความเร่งสู่ศูนย์กลางและคำนี้เรียกว่าความเร่งโคริโอลิสตัวอย่างเช่น ดู Shankar [ 26 ]คำศัพท์เหล่านี้ซึ่งปรากฏขึ้นเมื่อแสดงความเร่งในพิกัดเชิงขั้ว เป็นผลทางคณิตศาสตร์ของการหาอนุพันธ์ พวกมันปรากฏขึ้นทุกครั้งที่มีการใช้พิกัดเชิงขั้ว ในพลศาสตร์ของอนุภาคระนาบ ความเร่งเหล่านี้ปรากฏขึ้นเมื่อตั้งกฎการเคลื่อนที่ข้อที่สอง ของนิวตัน ในกรอบอ้างอิงที่หมุนได้ ในที่นี้ คำศัพท์พิเศษเหล่านี้มักเรียกว่าแรงสมมติสมมติเพราะเป็นเพียงผลลัพธ์ของการเปลี่ยนแปลงกรอบพิกัดเท่านั้น นั่นไม่ได้หมายความว่าพวกมันไม่มีอยู่จริง แต่พวกมันมีอยู่เฉพาะในกรอบที่หมุนได้เท่านั้น





กรอบหมุนร่วม
สำหรับอนุภาคที่เคลื่อนที่ในระนาบ แนวทางหนึ่งในการกำหนดความหมายทางกายภาพให้กับเงื่อนไขเหล่านี้ขึ้นอยู่กับแนวคิดของกรอบอ้างอิงร่วมหมุนทันที[ 27 ] ในการกำหนด กรอบอ้างอิงร่วมหมุนขั้นแรกจะเลือกจุดกำเนิดซึ่งกำหนดระยะทางr ( t ) ไปยังอนุภาค จากนั้น ตั้งแกนหมุน ที่ตั้งฉากกับระนาบการเคลื่อนที่ของอนุภาคและผ่านจุดกำเนิดนี้ ต่อมา ณ เวลา t ที่เลือก อัตราเชิงมุมของกรอบอ้างอิงร่วมหมุน Ω จะถูกทำให้ตรงกับอัตราการหมุนของอนุภาคเกี่ยวกับแกนนี้dφ / dtต่อไป เงื่อนไขในการเร่งความเร็วในกรอบอ้างอิงเฉื่อยจะสัมพันธ์กับเงื่อนไขในกรอบอ้างอิงร่วมหมุน
ให้ตำแหน่งของอนุภาคในกรอบอ้างอิงเฉื่อยเป็น ( r ( t ), φ ( t )) และในกรอบอ้างอิงร่วมหมุนเป็น ( r ′(t), φ ′(t)) เนื่องจากกรอบอ้างอิงร่วมหมุนด้วยอัตราเดียวกับอนุภาค ดังนั้นdφ ′/ dt = 0 แรงเหวี่ยงหนีศูนย์กลางเสมือนในกรอบอ้างอิงร่วมหมุนคือmr Ω 2ซึ่งมีทิศทางออกไปในแนวรัศมี ความเร็วของอนุภาคในกรอบอ้างอิงร่วมหมุนก็มีทิศทางออกไปในแนวรัศมีเช่นกัน เพราะdφ ′/ dt = 0 ดังนั้น แรงโคริโอลิสเสมือนจึงมีค่าเท่ากับ −2 m ( dr / dt )Ω ซึ่งมีทิศทางที่φ เพิ่มขึ้น เท่านั้น ดังนั้น เมื่อใช้แรงเหล่านี้ในกฎข้อที่สองของนิวตัน เราจะได้ว่า: โดยที่จุดเหนือตัวอักษรแทนอนุพันธ์เทียบกับเวลา และFคือแรงจริงสุทธิ (ตรงข้ามกับแรงเสมือน) ในแง่ของส่วนประกอบ สมการเวกเตอร์นี้จะกลายเป็น: ซึ่งสามารถนำไปเปรียบเทียบกับสมการสำหรับกรอบอ้างอิงเฉื่อยได้:



การเปรียบเทียบนี้ บวกกับการตระหนักว่าตามนิยามของกรอบอ้างอิงร่วมที่เวลาtจะมีอัตราการหมุน Ω = dφ / dtแสดงให้เห็นว่าเราสามารถตีความพจน์ในความเร่ง (คูณด้วยมวลของอนุภาค) ที่พบในกรอบอ้างอิงเฉื่อยได้ว่าเป็นค่าลบของแรงเหวี่ยงหนีศูนย์กลางและแรงโคริโอลิสที่จะพบได้ในกรอบอ้างอิงร่วมที่ไม่เฉื่อย ณ ขณะนั้น
สำหรับการเคลื่อนที่ทั่วไปของอนุภาค (ตรงข้ามกับการเคลื่อนที่แบบวงกลมอย่างง่าย) แรงเหวี่ยงหนีศูนย์กลางและแรงโคริโอลิสในกรอบอ้างอิงของอนุภาค มักจะอ้างอิงถึงวงกลมสัมผัส ชั่วขณะ ของการเคลื่อนที่นั้น ไม่ใช่จุดศูนย์กลางคงที่ของพิกัดเชิงขั้ว สำหรับรายละเอียดเพิ่มเติม โปรดดูที่ แรงสู่ศูนย์กลาง
เรขาคณิตเชิงอนุพันธ์
ในศัพท์ทางเรขาคณิตเชิงอนุพันธ์ สมัยใหม่ พิกัดเชิงขั้วให้แผนภูมิพิกัดสำหรับแมนิโฟลด์ที่หาอนุพันธ์ได้R 2 \ {(0,0)}ซึ่งเป็นระนาบที่ลบจุดกำเนิด ในพิกัดเหล่านี้เทนเซอร์เมตริก แบบยุคลิด จะกำหนดโดยซึ่งสามารถเห็นได้จากสูตรการเปลี่ยนตัวแปรสำหรับเทนเซอร์เมตริก หรือโดยการคำนวณรูปแบบเชิงอนุพันธ์dx , dyผ่านอนุพันธ์ภายนอกของรูปแบบ 0 x = r cos( θ ) , y = r sin( θ )และแทนที่ลงในเทนเซอร์เมตริกแบบยุคลิด ds 2 = dx 2 + dy 2

การพิสูจน์สูตรอย่างง่าย |
|---|
ให้, และเป็นจุดสองจุดในระนาบที่กำหนดโดยพิกัดคาร์ทีเซียนและพิกัดเชิงขั้วตามลำดับ แล้ว เนื่องจากและเราจึงได้ว่า ต่อไปนี้เราจะใช้เอกลักษณ์ตรีโกณมิติเพื่อดำเนินการต่อ: ถ้าปริมาณเชิงรัศมีและเชิงมุมอยู่ใกล้กัน และดังนั้นจึงอยู่ใกล้กับปริมาณร่วมและเราจะได้ว่ายิ่งไปกว่านั้น ค่าโคไซน์ของสามารถประมาณได้ด้วยอนุกรมเทย์เลอร์ของโคไซน์จนถึงพจน์เชิงเส้น: ดังนั้นและ. ด้วยเหตุนี้ รอบๆ โดเมนที่เล็กมากจนแทบมองไม่เห็นของจุดใดๆ ตามที่กล่าวไว้ |

















กรอบออร์โทนอร์มอล ที่สัมพันธ์กับเมตริกนี้กำหนดโดยโดยมีโคเฟรมคู่การเชื่อมต่อรูปแบบที่สัมพันธ์กับกรอบนี้และการเชื่อมต่อ Levi-Civitaกำหนดโดยเมทริกซ์สมมาตรเฉียงของ 1-ฟอร์มดังนั้นรูปแบบความโค้งΩ = dω + ω ∧ ωจึงเป็นศูนย์ ดังนั้น ตามที่คาดไว้ ระนาบที่ถูกเจาะจึงเป็น แมนิโฟล ด์ แบนราบ



ส่วนขยายในพื้นที่สามมิติ
ระบบพิกัดเชิงขั้วถูกขยายไปสู่สามมิติด้วยระบบพิกัดสองแบบที่แตกต่างกัน คือ ระบบ พิกัด ทรงกระบอกและระบบพิกัดทรงกลมซึ่งทั้งสองระบบนี้รวมถึงพิกัดเชิงขั้วสองมิติหรือระนาบเป็นส่วนย่อย โดยพื้นฐานแล้ว ระบบพิกัดทรงกระบอกขยายพิกัดเชิงขั้วโดยการเพิ่มพิกัดระยะทางเพิ่มเติม ในขณะที่ระบบพิกัดทรงกลมเพิ่มพิกัดเชิงมุมเพิ่มเติมแทน
พิกัดทรงกระบอก


ระบบพิกัดทรงกระบอกเป็นระบบพิกัดที่ต่อยอดมาจากระบบพิกัดเชิงขั้วสองมิติ โดยเพิ่มพิกัดที่สามซึ่งวัดความสูงของจุดเหนือระนาบ คล้ายกับการขยายระบบพิกัดคาร์ทีเซียน ไปสู่สามมิติ พิกัดที่สามนี้ใช้สัญลักษณ์ ทำให้มีพิกัดทรงกระบอกสามพิกัดคือ ดังนั้น พิกัดทรงกระบอกสามพิกัดสามารถแปลงเป็นพิกัดคาร์ทีเซียนได้โดยใช้สูตร


พิกัดทรงกลม

พิกัดเชิงขั้วยังสามารถขยายเป็นสามมิติได้โดยใช้พิกัด (ρ, φ, θ) โดยที่ ρ คือระยะห่างจากขั้วโลก φ คือมุมจากแกน z (เรียกว่าโคลาติจูดหรือซีเนท และวัดจาก 0 ถึง 180°) และ θ คือมุมจากแกน x (เช่นเดียวกับในพิกัดเชิงขั้ว) ระบบพิกัดนี้เรียกว่าระบบพิกัดทรงกลมซึ่งคล้ายกับ ระบบ ละติจูดและลองจิจูดที่ใช้สำหรับโลก โดยที่ละติจูด δ เป็นส่วนเติมเต็มของ φ ซึ่งกำหนดโดย δ = 90° − φ และลองจิจูดlวัดโดยl = θ − 180° [ 28 ]
พิกัดทรงกลมทั้งสามจะถูกแปลงเป็นพิกัดคาร์ทีเซียนโดย

แอปพลิเคชัน
พิกัดเชิงขั้วเป็นระบบสองมิติ ดังนั้นจึงสามารถใช้ได้เฉพาะในกรณีที่ตำแหน่งของจุดอยู่บนระนาบสองมิติเดียวกันเท่านั้น พิกัดเชิงขั้วเหมาะสมที่สุดในบริบทใดๆ ก็ตามที่ปรากฏการณ์ที่กำลังพิจารณามีความสัมพันธ์โดยตรงกับทิศทางและความยาวจากจุดศูนย์กลาง ตัวอย่างเช่น ตัวอย่างข้างต้นแสดงให้เห็นว่าสมการเชิงขั้วพื้นฐานเพียงพอที่จะกำหนดเส้นโค้ง เช่น เกลียวอาร์คิมีดีส ซึ่งสมการในระบบพิกัดคาร์ทีเซียนจะซับซ้อนกว่ามาก ยิ่งไปกว่านั้น ระบบทางฟิสิกส์หลายระบบ เช่น ระบบที่เกี่ยวข้องกับวัตถุที่เคลื่อนที่รอบจุดศูนย์กลาง หรือปรากฏการณ์ที่เกิดขึ้นจากจุดศูนย์กลางนั้น ง่ายต่อการจำลองและเข้าใจได้ง่ายกว่าเมื่อใช้พิกัดเชิงขั้ว แรงจูงใจเริ่มต้นในการนำระบบพิกัดเชิงขั้วมาใช้คือการศึกษา การเคลื่อนที่ แบบวงกลมและการเคลื่อนที่ในวงโคจร
ตำแหน่งและการนำทาง
พิกัดเชิงขั้วมักใช้ในการนำทางเนื่องจากสามารถระบุจุดหมายปลายทางหรือทิศทางการเดินทางเป็นมุมและระยะทางจากวัตถุที่กำลังพิจารณาได้ ตัวอย่างเช่นเครื่องบินใช้พิกัดเชิงขั้วที่ดัดแปลงเล็กน้อยสำหรับการนำทาง ในระบบนี้ ซึ่งเป็นระบบที่ใช้กันโดยทั่วไปสำหรับการนำทางทุกประเภท รังสี 0° มักเรียกว่าหัว 360 และมุมจะต่อเนื่องไปในทิศทางตามเข็มนาฬิกา แทนที่จะเป็นทวนเข็มนาฬิกา เหมือนในระบบทางคณิตศาสตร์ หัว 360 สอดคล้องกับทิศเหนือแม่เหล็กในขณะที่หัว 90, 180 และ 270 สอดคล้องกับทิศตะวันออก ทิศใต้ และทิศตะวันตกแม่เหล็ก ตามลำดับ[ 29 ]ดังนั้น เครื่องบินที่เดินทาง 5 ไมล์ทะเลไปทางทิศตะวันออก จะเดินทาง 5 หน่วยที่หัว 90 (อ่านว่าศูนย์-เก้า-ศูนย์โดยการควบคุมการจราจรทางอากาศ ) [ 30 ]
การสร้างแบบจำลอง
ระบบที่มีสมมาตรแบบรัศมีเป็นระบบที่เหมาะสมอย่างยิ่งสำหรับการใช้ระบบพิกัดเชิงขั้ว โดยมีจุดศูนย์กลางเป็นขั้ว ตัวอย่างที่สำคัญของการใช้งานนี้คือสมการการไหลของน้ำใต้ดินเมื่อนำไปใช้กับบ่อที่มีสมมาตรแบบรัศมี ระบบที่มีแรงในแนวรัศมีก็เป็นตัวเลือกที่ดีสำหรับการใช้ระบบพิกัดเชิงขั้วเช่นกัน ระบบเหล่านี้รวมถึงสนามโน้มถ่วงซึ่งเป็นไปตามกฎกำลังสองผกผันรวมทั้งระบบที่มีแหล่งกำเนิดแบบจุดเช่นเสาอากาศวิทยุ
ระบบที่ไม่สมมาตรตามรัศมีอาจสร้างแบบจำลองด้วยพิกัดเชิงขั้วได้เช่นกัน ตัวอย่างเช่นรูปแบบการรับเสียงของไมโครโฟนแสดงให้เห็นถึงการตอบสนองตามสัดส่วนต่อเสียงที่เข้ามาจากทิศทางที่กำหนด และรูปแบบเหล่านี้สามารถแสดงเป็นเส้นโค้งเชิงขั้วได้ เส้นโค้งสำหรับไมโครโฟนแบบคาร์ดิออยด์มาตรฐาน ซึ่งเป็นไมโครโฟนแบบทิศทางเดียวที่พบได้บ่อยที่สุด สามารถแสดงเป็นr = 0.5 + 0.5sin( ϕ )ที่ความถี่ออกแบบเป้าหมาย[ 31 ]รูปแบบจะเปลี่ยนไปสู่การรับเสียงแบบรอบทิศทางที่ความถี่ต่ำกว่า
ดูเพิ่มเติม
- การหมุน 2 มิติ
- พิกัดโค้ง
- รายการการแปลงพิกัดทั่วไป
- พิกัดเชิงขั้วแบบลอการิทึม
- การสลายตัวแบบโพลาร์
- วงกลมหน่วย
ลิงก์ภายนอก
- "พิกัดเชิงขั้ว" , สารานุกรมคณิตศาสตร์ , EMS Press , 2001 [1994]
- โปรแกรมแปลงพิกัด — แปลงระหว่างพิกัดเชิงขั้ว พิกัดคาร์ทีเซียน และพิกัดทรงกลม
- การสาธิตแบบไดนามิกของระบบพิกัดเชิงขั้ว
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ระบบพิกัดเชิงขั้ว
ในทางคณิตศาสตร์ระบบพิกัดเชิงขั้วระบุจุด ที่กำหนด บนระนาบโดยใช้ระยะทางและมุมเป็นพิกัด สองตัว ได้แก่ ระยะทาง และ มุม
ประวัติศาสตร์
แนวคิดเรื่องมุมและรัศมีนั้นถูกใช้โดยชนชาติโบราณในช่วงสหัสวรรษแรกก่อน คริสต์ศักราช แล้ว นักดาราศาสตร์ชาวกรีก ฮิปปาร์คัส (190–120 ปีก่อนคริสต์ศักราช) ได้สร้างตาราง ฟังก์ชัน คอร์ด ที่ให้ความยาวของคอร์ดสำหรับแต่ละมุม...
อนุสัญญา
พิกัดรัศมีมักจะแสดงด้วยหรือ( โร ) พิกัดเชิงมุมแสดงด้วย( ฟี ) ซึ่งกำหนดโดยมาตรฐาน ISO 31-11 (ปัจจุบัน คือ 80000-2:2019 ) [ 10 ] หรือ( ทีตา ) ในเอกสารทางคณิตศาสตร์บ่อยครั้ง [ 11 ] ร {\displaystyle r} ρ {\displaystyle \rho } φ {\displaystyle \varphi } θ...
ความเป็นเอกลักษณ์ของพิกัดเชิงขั้ว
การเพิ่มจำนวน รอบ เต็ม (360°) ใดๆ ให้กับพิกัดเชิงมุมจะไม่เปลี่ยนแปลงทิศทางที่สอดคล้องกัน ในทำนองเดียวกัน พิกัดเชิงขั้วใดๆ ก็เหมือนกับพิกัดที่มีส่วนประกอบรัศมีเป็นลบและทิศทางตรงกันข้าม (การเพิ่ม 180° ให้กับมุมเชิงขั้ว) ดังนั้น...