อ่าน 11 นาที
การเดินรถไฟอัตโนมัติ
การเดินรถไฟอัตโนมัติ ( ATO ) เป็นวิธีการเดิน รถไฟ โดยอัตโนมัติ ซึ่งไม่จำเป็นต้องมีคนขับหรือต้องการการดูแลเพียงเล็กน้อยเท่านั้น [ 1 ] หรืออีกนัยหนึ่ง ATO...
การเดินรถไฟอัตโนมัติ
| การจราจรบนรางอัตโนมัติ |
|---|
| การเดินรถไฟอัตโนมัติ |
| รายชื่อระบบรถไฟอัตโนมัติ |
| หัวข้อที่เกี่ยวข้อง |
การเดินรถไฟอัตโนมัติ ( ATO ) เป็นวิธีการเดินรถไฟโดยอัตโนมัติซึ่งไม่จำเป็นต้องมีคนขับหรือต้องการการดูแลเพียงเล็กน้อยเท่านั้น[ 1 ]หรืออีกนัยหนึ่ง ATO สามารถนิยามได้ว่าเป็นระบบย่อยภายในระบบควบคุมรถไฟอัตโนมัติซึ่งทำหน้าที่ใดๆ หรือทั้งหมด เช่น การหยุดตามโปรแกรม การปรับความเร็ว การเปิดปิดประตู และอื่นๆ ที่คล้ายคลึงกันซึ่งปกติแล้วมอบหมายให้ผู้ควบคุมรถไฟเป็นผู้ทำ[ 2 ]

ระดับของระบบอัตโนมัติจะระบุด้วยระดับของระบบอัตโนมัติ (GoA) จนถึง GoA4 ซึ่งรถไฟจะถูกควบคุมโดยอัตโนมัติโดยไม่มีพนักงานอยู่บนรถ[ 3 ]ในระบบส่วนใหญ่สำหรับระดับระบบอัตโนมัติที่ต่ำกว่าจนถึง GoA2 จะมีคนขับอยู่เพื่อลดความเสี่ยงที่เกี่ยวข้องกับความล้มเหลวหรือเหตุฉุกเฉิน ระบบอัตโนมัติแบบไร้คนขับส่วนใหญ่ใช้ใน ระบบ ขนส่งทางรางอัตโนมัติซึ่งง่ายต่อการรับประกันความปลอดภัยเนื่องจากรางแยก รถไฟอัตโนมัติเต็มรูปแบบสำหรับทางรถไฟสายหลักเป็นหัวข้อการวิจัย[ 4 ]การทดลองรถไฟไร้คนขับครั้งแรกในประวัติศาสตร์ของระบบอัตโนมัติของรถไฟ ย้อนกลับไปในช่วงทศวรรษ 1920 [ 5 ]
ระดับของระบบอัตโนมัติ
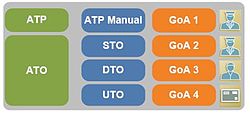
ตามสมาคมขนส่งสาธารณะระหว่างประเทศ (UITP) และมาตรฐานสากลIEC 62290-1มีระดับการทำงานอัตโนมัติ (GoA) ของรถไฟอยู่ 5 ระดับ[ 6 ] [ 7 ] [ 8 ]ระดับเหล่านี้สอดคล้องกับการจำแนกประเภทรถยนต์SAE J3016 : [ 9 ] [ 10 ]
| ระดับของระบบอัตโนมัติ | การเดินรถไฟ | คำอธิบายและตัวอย่าง | ระดับ SAE |
|---|---|---|---|
| โกเอ0 | ในสถานที่ | ไม่มีระบบอัตโนมัติ | 0 |
| โกเอ1 | คู่มือ | พนักงานขับรถไฟควบคุมการเริ่มต้นและการหยุด การทำงานของประตู และการจัดการเหตุฉุกเฉินหรือการเบี่ยงเบนเส้นทางกะทันหัน สัญญาณที่มองข้ามเนื่องจากความผิดพลาดของมนุษย์ได้รับการปกป้องโดยระบบป้องกันรถไฟเช่นETCS L1 [ 11 ] | 1 |
| โกเอ2 | กึ่งอัตโนมัติ (STO) | การเริ่มต้นและการหยุดรถเป็นระบบอัตโนมัติโดยใช้ระบบป้องกันรถไฟ ขั้นสูง เช่นETCS L2หรือ3 [ 11 ] [ 12 ] แต่คนขับจะเป็นผู้ควบคุมประตู ขับรถไฟหากจำเป็น และจัดการกับเหตุฉุกเฉิน ระบบ ATO หลาย ระบบเป็น GoA2 ในระบบนี้ รถไฟจะวิ่งอัตโนมัติจากสถานีหนึ่งไปยังอีกสถานีหนึ่ง แต่คนขับจะอยู่ในห้องโดยสาร มีหน้าที่รับผิดชอบในการปิดประตู ตรวจจับสิ่งกีดขวางบนรางรถไฟด้านหน้า และจัดการกับสถานการณ์ฉุกเฉิน เช่นเดียวกับในระบบ GoA3 รถไฟ GoA2 ไม่สามารถวิ่งได้อย่างปลอดภัยหากไม่มีเจ้าหน้าที่อยู่บนรถ ตัวอย่างเช่น รถไฟใต้ดินสายวิคตอเรียของลอนดอนและรถไฟ ใต้ดิน สาย 7ของนิวยอร์กซิตี้ | 2 |
| โกเอ3 | รถยนต์ไร้คนขับ (DTO) | การออกตัวและการหยุดรถเป็นระบบอัตโนมัติ แต่พนักงานประจำรถไฟจะเป็นผู้ควบคุมประตูและขับรถไฟในกรณีฉุกเฉิน ในระบบนี้ รถไฟจะวิ่งอัตโนมัติจากสถานีหนึ่งไปยังอีกสถานีหนึ่ง แต่จะมีพนักงานประจำอยู่บนรถไฟเสมอ เพื่อรับผิดชอบในการจัดการสถานการณ์ฉุกเฉิน ในระบบ GoA3 รถไฟไม่สามารถวิ่งได้อย่างปลอดภัยหากไม่มีพนักงานอยู่บนรถไฟ ตัวอย่างเช่นรถไฟ Docklands Light Railway | 3 และ 4 |
| โกเอ4 | ระบบอัตโนมัติ (UTO) หรือระบบไร้คนควบคุม (MTO) | การเริ่มต้น การหยุด และการทำงานของประตูทั้งหมดเป็นแบบอัตโนมัติอย่างสมบูรณ์โดยไม่ต้องมีเจ้าหน้าที่บนรถไฟ ขอแนะนำให้สถานี ติดตั้ง ประตูหน้าจอชานชาลาในระบบนี้ รถไฟสามารถทำงานได้โดยอัตโนมัติตลอดเวลา รวมถึงการปิดประตู การตรวจจับสิ่งกีดขวาง และสถานการณ์ฉุกเฉิน อาจมีเจ้าหน้าที่บนรถไฟเพื่อวัตถุประสงค์อื่น ๆ เช่น การบริการลูกค้า แต่ไม่จำเป็นสำหรับการทำงานที่ปลอดภัย มักมีระบบควบคุมให้ขับรถไฟด้วยตนเองในกรณีที่คอมพิวเตอร์ขัดข้องCBTCถือเป็นเทคโนโลยีพื้นฐานที่ช่วยให้ GoA4 ทำงานได้[ 11 ]ตัวอย่างเช่นรถไฟใต้ดินเดลีรถไฟใต้ดินบังกาลอร์รถไฟลอยฟ้าแวนคูเวอร์สายเกาะใต้และรถไฟใต้ดินเทสซาโลนิกิ |
ประเภทเพิ่มเติม
| ระดับของระบบอัตโนมัติ | คำอธิบายและตัวอย่าง |
|---|---|
| โกเอ1+ | นอกจาก GoA1 แล้ว ยังมีการเพิ่มประสิทธิภาพการใช้พลังงานบนรถไฟที่เชื่อมต่อ (C-DAS) ผ่านETCS อีก ด้วย [ 13 ] |
| โกเอ2+ | ในกรณีของรถไฟใต้ดินอัมสเตอร์ดัม GoA2 สามารถกลับทิศทางใน GoA4 ได้ที่สถานีปลายทาง[ 14 ]ซึ่งระบุด้วยเครื่องหมาย '+' GoA2+ ยังมีอยู่ใน สาย M5 ของรถไฟใต้ดินบูคาเรสต์ซึ่งใช้ URBALIS 400 CBTC เดียวกันกับอัมสเตอร์ดัม |
| โกเอ2(+) | นี่คือ GoA2 ที่มีฟังก์ชันเพิ่มเติมที่เกี่ยวข้องกับทางรถไฟรางแคบ [ 15 ] |
| โกเอ2.5 | ในญี่ปุ่น นี่เป็นรูปแบบหนึ่งของ "การเดินรถแบบไร้คนขับโดยมีพนักงานประจำรถ" โดยพนักงานประจำรถจะนั่งอยู่ในห้องโดยสารและรับผิดชอบในการตรวจจับสิ่งกีดขวางและทำการหยุดฉุกเฉิน นอกเหนือจากหน้าที่อื่นๆ ของพนักงานประจำรถ GoA3 [ 16 ]บริษัท Kyushu Railwayได้เริ่มดำเนินการสาธิตการให้บริการเชิงพาณิชย์ครั้งแรกของระบบ GoA2.5 ที่พร้อมใช้งานบนสาย Kashii (ระหว่างสถานี Saitozaki และ Kashii) เมื่อวันที่ 24 ธันวาคม 2020 ในขณะที่ยังคงมีพนักงานขับรถประจำอยู่บนรถไฟ[ 17 ]และตั้งแต่นั้นมาก็ได้เริ่มดำเนินการให้บริการเชิงพาณิชย์ตามปกติโดยไม่มีพนักงานขับรถบนสาย Kashii ทั้งหมดและเลยไปกว่านั้น[ 18 ] |
| โกเอ3+ | คำศัพท์รวมสำหรับ GoA3 และ GoA4 หมายถึงการทดแทนพนักงานขับรถไฟที่เป็นมนุษย์[ 19 ]คำว่าGoA3/4 , GoA3,4และรถไฟอัตโนมัติถูกใช้ในความหมายเดียวกัน[ 20 ] [ 16 ] |
การดำเนินงานของ ATO

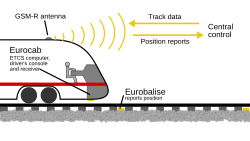
ระบบที่ทันสมัยหลายระบบเชื่อมโยงกับระบบป้องกันรถไฟอัตโนมัติ (ATP) และในหลายกรณีก็เชื่อม โยงกับ ระบบควบคุมรถไฟอัตโนมัติ (ATC) ซึ่ง ระบบจะดำเนินการส่ง สัญญาณ ตามปกติ เช่น การกำหนดเส้นทางและการควบคุมรถไฟ ระบบ ATC และ ATP จะทำงานร่วมกันเพื่อรักษาระดับความเร็วของรถไฟให้อยู่ภายในขอบเขตความคลาดเคลื่อนที่กำหนดไว้ ระบบที่รวมกันนี้จะปรับพารามิเตอร์การทำงานเล็กน้อย เช่น อัตราส่วนของกำลังไฟฟ้าต่อการวิ่งโดยไม่ใช้กำลังขณะเคลื่อนที่ และเวลาจอด ที่สถานี เพื่อให้เป็นไปตามตารางเวลาที่กำหนดไว้
ในขณะที่ ATP เป็นระบบความปลอดภัยที่ช่วยให้มั่นใจได้ว่ามีระยะห่างที่ปลอดภัยระหว่างขบวนรถไฟและให้สัญญาณเตือนที่เพียงพอเมื่อถึงเวลาหยุด ส่วน ATO เป็นส่วนที่ไม่เกี่ยวข้องกับความปลอดภัยในการเดินรถไฟ ซึ่งเกี่ยวข้องกับการหยุดและออกตัวที่สถานี และจะระบุตำแหน่งการหยุดของรถไฟเมื่อ ATP ยืนยันแล้วว่าเส้นทางปลอดภัย
รถไฟเข้าใกล้สถานีภายใต้สัญญาณที่ชัดเจน จึงสามารถวิ่งเข้าสถานีได้ตามปกติ เมื่อถึงสัญญาณแรก – เดิมทีเป็นสายเคเบิลแบบวนรอบ ปัจจุบันมักจะเป็นทรานสปอนเดอร์แบบคงที่ – รถไฟจะได้รับคำสั่งเบรกของสถานี คอมพิวเตอร์บนรถไฟจะคำนวณเส้นโค้งการเบรกเพื่อให้หยุดที่จุดที่ถูกต้อง และเมื่อรถไฟวิ่งเข้าหาชานชาลา เส้นโค้งจะได้รับการอัปเดตหลายครั้ง (ซึ่งแตกต่างกันไปในแต่ละระบบ) เพื่อให้มั่นใจในความแม่นยำ[ 21 ]
เมื่อรถไฟหยุดแล้ว ระบบจะตรวจสอบว่าเบรกทำงานอยู่หรือไม่ และตรวจสอบว่ารถไฟหยุดอยู่ภายในวงจรควบคุมการเปิดประตู วงจรเหล่านี้จะตรวจสอบตำแหน่งของรถไฟเทียบกับชานชาลา และตรวจสอบว่าประตูควรเปิดไปทางด้านใด เมื่อทุกอย่างเสร็จสิ้นแล้ว ATO จะเปิดประตู หลังจากเวลาที่กำหนดไว้ล่วงหน้าหรือเปลี่ยนแปลงโดยศูนย์ควบคุมตามความจำเป็น ATO จะปิดประตูและเริ่มเดินรถไฟใหม่โดยอัตโนมัติหากวงจรตรวจสอบการปิดประตูเสร็จสมบูรณ์ ระบบบางระบบมีประตูกั้นชานชาลา ด้วย ATO จะส่งสัญญาณให้ประตูเหล่านี้เปิดเมื่อเสร็จสิ้นขั้นตอนการตรวจสอบบนรถไฟแล้ว แม้ว่าจะอธิบายไว้ที่นี่ว่าเป็นฟังก์ชันของ ATO แต่การเปิดใช้งานประตูที่สถานีมักจะรวมอยู่ในอุปกรณ์ ATP เนื่องจากถือว่าเป็นระบบที่ "สำคัญ" และต้องใช้กระบวนการตรวจสอบความปลอดภัยเช่นเดียวกับ ATP [ 21 ]
เมื่อการทำงานของประตูเสร็จสิ้น ATO จะเร่งความเร็วรถไฟให้ถึงความเร็วในการวิ่งปกติ ปล่อยให้รถไฟแล่นไปจนถึงสัญญาณคำสั่งเบรกของสถานีถัดไป จากนั้นจึงเบรกเข้าสู่สถานีถัดไป โดยสมมติว่าไม่มีการแทรกแซงจากระบบ ATP [ 21 ]
ข้อดีของ GoA3+
ในปี 2021 กรมการขนส่งของรัฐฟลอริดาได้ให้ทุนสนับสนุนการตรวจสอบโดยนักวิทยาศาสตร์จากมหาวิทยาลัยแห่งรัฐฟลอริดามหาวิทยาลัยทัลกาและมหาวิทยาลัยโพลีเทคนิคฮ่องกงซึ่งแสดงให้เห็นถึงข้อดีของรถไฟอัตโนมัติดังต่อไปนี้: [ 22 ]
- การกำจัดข้อผิดพลาดที่เกิดจากมนุษย์
- เพิ่มขีดความสามารถโดยการใช้ประโยชน์จากรางรถไฟที่มีอยู่ให้มีประสิทธิภาพยิ่งขึ้น
- การลดต้นทุนการดำเนินงาน รถไฟใต้ดินปารีสลดต้นทุนการดำเนินงานลง 30% ในกรณีของ GoA 4 [ 23 ]
- เพิ่มความน่าเชื่อถือของบริการโดยรวม
- ปรับปรุงการจัดการยานพาหนะและความยืดหยุ่นในการให้บริการ
- การเพิ่มประสิทธิภาพการใช้พลังงาน
อุบัติเหตุและเหตุการณ์ที่เกี่ยวข้องกับ ATO
แม้ว่าระบบ ATO จะได้รับการพิสูจน์แล้วว่าช่วยลดโอกาสเกิดข้อผิดพลาดจากมนุษย์ในการดำเนินงานทางรถไฟได้อย่างมาก แต่ก็มีอุบัติเหตุที่น่าสนใจเกิดขึ้นบ้างซึ่งเกี่ยวข้องกับระบบ ATO:
| ปี | อาณาเขต | เหตุการณ์ |
|---|---|---|
| พ.ศ. 2536 | ญี่ปุ่น | เมื่อวันที่ 5 ตุลาคม พ.ศ. 2536 รถไฟอัตโนมัติสายเมืองท่านันโกะวิ่งเลยสถานีปลายทางทางใต้ที่สถานีสุมิโนเคะเอ็นและชนกับแผงกั้นทำให้มีผู้บาดเจ็บ 217 คน เชื่อกันว่าสาเหตุเกิดจากความผิดพลาดของรีเลย์ บางตัว ในอุปกรณ์ ATO ของสายรถไฟที่ส่งสัญญาณคำสั่งเบรก ทำให้เบรกไม่ทำงาน[ 24 ]การเดินรถกลับมาดำเนินการอีกครั้งในวันที่ 19 พฤศจิกายน พ.ศ. 2536 หลังจาก ติดตั้งและทดสอบอุปกรณ์ สำรองในสายรถไฟ แล้ว [ 25 ] |
| 2011 | จีน | เมื่อวันที่ 27 กันยายน 2554 เวลา 14:51 น. ตามเวลาท้องถิ่น (06:51 น. UTC ) รถไฟสองขบวนบนรถไฟฟ้าใต้ดินสาย 10 ของเซี่ยงไฮ้ชนกันระหว่างสถานี Yuyuan Gardenและสถานี Laoximenทำให้มีผู้บาดเจ็บ 284–300 คน การสอบสวนเบื้องต้นพบว่าพนักงานขับรถไฟละเมิดกฎระเบียบขณะควบคุมรถไฟด้วยตนเองหลังจากไฟฟ้าดับบนสายทำให้ระบบ ATO และระบบส่งสัญญาณล้มเหลว ไม่มีรายงานผู้เสียชีวิต[ 26 ] |
| 2015 | เม็กซิโก | เมื่อวันที่ 4 พฤษภาคม 2558 เวลาประมาณ 18:00 น. ตามเวลาท้องถิ่น (00:00 น. UTC) [ 27 ]ท่ามกลางฝนตกหนักและลูกเห็บ[ 28 ]รถไฟสองขบวนชนกันที่สถานีโอเชียเนียบนสายรถไฟใต้ดินเม็กซิโกซิตี้ สาย 5ขณะที่ทั้งสองขบวนกำลังมุ่งหน้าไปยังสถานีโปลิเตชนิโก [ 29 ] รถไฟขบวนแรก หมายเลข 4 จอดอยู่ที่ปลายชานชาลาของสถานีโอเชียเนีย หลังจากที่คนขับรายงานว่า มีแผ่น ไม้อัดกีดขวางราง[ 30 ]รถไฟขบวนที่สอง หมายเลข 5 ออกจากสถานีเทอร์มินัล เอเรีย โดยเปิดระบบ PA-135 ATO แบบอนาล็อกไว้ แม้ว่าคนขับจะได้รับคำสั่งให้ปิดระบบและควบคุมรถไฟด้วยตนเอง[ 31 ]ตามที่ระเบียบกำหนดไว้เมื่อฝนตก เนื่องจากรถไฟต้องวิ่งด้วยความเร็วที่ลดลง[ 32 ]รถไฟขบวนที่ 5 ชนกับรถไฟขบวนที่ 4 ด้วยความเร็ว 31.8 กม./ชม. (19.8 ไมล์/ชม.) [ 31 ]ซึ่งเป็นสองเท่าของความเร็วเฉลี่ยเมื่อมาถึงชานชาลา[ 30 ]และทำให้มีผู้บาดเจ็บ 12 คน[ 33 ] |
| 2017 | สิงคโปร์ | อุบัติเหตุทางรถไฟที่จูคูน – เมื่อวันที่ 15 พฤศจิกายน 2017 เวลาประมาณ 08:30 น. ตามเวลาท้องถิ่น (00:30 น. UTC) รถไฟ SMRT สายตะวันออก-ตะวันตก รุ่นC151A ขบวนหนึ่ง ได้ชนท้ายรถไฟอีกขบวนหนึ่งที่สถานีรถไฟฟ้า MRT จูคูนในสิงคโปร์ ทำให้มีผู้บาดเจ็บ 38 ราย ในขณะนั้น สายตะวันออก-ตะวันตกกำลังอยู่ในระหว่างการ เปลี่ยน ระบบสัญญาณบล็อกคง ที่ Westinghouse ATC และระบบ ATO ที่เกี่ยวข้องไปเป็น ระบบสัญญาณ บล็อกเคลื่อนที่Thales SelTrac CBTC รถไฟขบวนหนึ่งที่เกี่ยวข้องได้ถอดคุณสมบัติการป้องกันความปลอดภัยออกเมื่อวิ่งผ่านวงจรสัญญาณที่ผิดพลาดเพื่อแก้ไขข้อบกพร่องของซอฟต์แวร์ที่ทราบ จึงทำให้ระบบสัญญาณ "แตก" และนำไปสู่การชนกัน[ 34 ] |
| 2017 | อินเดีย | ก่อนที่นายกรัฐมนตรีจะขึ้นรถไฟ ไม่กี่วันก่อนการเปิดให้บริการ รถไฟใต้ดินเดลีขบวนหนึ่งกำลังอยู่ระหว่างการทดสอบ ATO ที่สถานี Kalindi Kunj Depot ขณะที่รถไฟเข้าใกล้กันชน รถไฟได้ชนกันชนและตกราง ชนเข้ากับกำแพงด้านหน้า กำแพงถูกซ่อมแซมด้วยอิฐในที่สุด อย่างไรก็ตาม ในที่สุดก็พบว่าเบรกไม่ได้ถูกใช้งานโดยอัตโนมัติในระหว่างการปฏิบัติงาน[ 35 ]ส่งผลให้รถไฟต้องถูกควบคุมโดยคนขับจนถึงปี 2024 ทำให้การดำเนินงาน UTO เต็มรูปแบบล่าช้าออกไปเจ็ดปี |
| 2019 | ฮ่องกง | เหตุการณ์ที่คล้ายคลึงกันกับข้างต้นเกิดขึ้นบนสายรถไฟฟ้า MTR Tsuen Wanในฮ่องกงเมื่อวันที่ 18 มีนาคม 2019 เมื่อรถไฟฟ้าMTR M-Train EMU สอง ขบวนชนกันในส่วนทางแยกรางระหว่างAdmiraltyและCentral ขณะที่ MTR กำลังทดสอบ ระบบควบคุมรถไฟSelTrac เวอร์ชันใหม่ ซึ่งมีจุดประสงค์เพื่อทดแทนระบบสัญญาณ SACEMเดิมของสายนี้ไม่มีผู้โดยสารอยู่บนรถไฟทั้งสองขบวน แม้ว่าผู้ควบคุมรถไฟทั้งสองขบวนจะได้รับบาดเจ็บก็ตาม[ 36 ]ก่อนที่สถานที่เกิดเหตุจะได้รับการทำความสะอาด รถไฟสาย Tsuen Wan ทุกขบวนจะสิ้นสุดที่สถานี Admiralty แทนที่จะเป็น Central ผู้จำหน่ายรายเดียวกันนี้ยังได้จัดหาระบบสัญญาณที่คล้ายกันในสิงคโปร์ซึ่งส่งผลให้เกิดอุบัติเหตุทางรถไฟที่ Joo Koonในปี 2017 [ 37 ]ในเดือนกรกฎาคม 2019 กรมบริการไฟฟ้าและเครื่องกล (EMSD) ได้เผยแพร่รายงานการสอบสวนเกี่ยวกับเหตุการณ์ดังกล่าวและสรุปว่าข้อผิดพลาดในการเขียนโปรแกรมในระบบสัญญาณ SelTrac ทำให้ระบบ ATP ทำงานผิดปกติ ส่งผลให้เกิดการชนกัน[ 38 ] |
| 2021 | มาเลเซีย | เหตุการณ์รถไฟ LRT ชนกันที่ Kelana Jayaในกัวลาลัมเปอร์ ในปี 2021 ซึ่งมีผู้บาดเจ็บ 213 คน เกิดจากความผิดพลาดของมนุษย์ คอมพิวเตอร์ควบคุมและคอมพิวเตอร์ควบคุมสำรองทำงานผิดพลาด จึงมีการเรียกพนักงานขับรถไฟมาขับรถไฟไปยังสถานี พนักงานขับรถไฟขับรถในทิศทางตรงกันข้ามกับราง ทำให้เกิดการชนกับรถไฟ ระบบ ATP ไม่ทำงานเนื่องจากรถไฟหายไปจากระบบอันเป็นผลมาจากการทำงานผิดพลาดของคอมพิวเตอร์ทั้งสองเครื่อง[ 39 ] |
| 2022 | จีน | เมื่อวันที่ 22 มกราคม 2565 ผู้โดยสารสูงอายุคนหนึ่งติดอยู่ระหว่างประตูรถไฟและประตูมุ้งลวดที่สถานี Qi'an Roadของสาย 15 (รถไฟฟ้าใต้ดินเซี่ยงไฮ้)เมื่อเห็นสถานการณ์ดังกล่าว พนักงานได้ใช้งานระบบควบคุมประตูรถไฟผิดพลาด ทำให้ประตูมุ้งลวดแยกออกโดยไม่ตรวจจับ ส่งผลให้รถไฟวิ่งไปได้ระยะหนึ่งและทำให้ผู้โดยสารที่ติดอยู่ได้รับบาดเจ็บสาหัสจนเสียชีวิต[ 40 ] |
| 2023 | ไต้หวัน | เมื่อวันที่ 10 พฤษภาคม 2566 เครนก่อสร้างตัวหนึ่งได้ล้มลงบนรางรถไฟฟ้า MRTสายสีเขียวของเมืองไท่จง ทางใต้ของสถานีรถไฟใต้ดินสวนเฟิงเล่อ รถไฟฟ้าไร้คนขับจอดนิ่งอยู่ขณะที่เครนล้มลงบนราง และรถไฟก็แล่นต่อไปชนเข้ากับสิ่งกีดขวาง พนักงานประจำรถไฟได้ติดต่อศูนย์ควบคุมเกี่ยวกับเครนที่ล้มลงกีดขวางราง อย่างไรก็ตาม การจะสั่งการเบรกฉุกเฉินจากระยะไกลนั้นต้องใช้เวลาถึง 20 วินาที ซึ่งไม่เพียงพอที่จะป้องกันการชนได้ |
โครงการวิจัยของ ATO
| ชื่อ | เริ่มต้นปี | สิ้นปี | คำอธิบาย | ประเทศ | ปริมาณ |
|---|---|---|---|---|---|
| สมาราจ | 1999 | การทำให้ระบบ รถไฟใต้ดินนูเรมเบิร์กเป็นระบบอัตโนมัติ[ 41 ] | เยอรมนี | ||
| รูบิน | 2001 | การทำให้ระบบ รถไฟใต้ดินนูเรมเบิร์กเป็นระบบอัตโนมัติ[ 42 ] | เยอรมนี | ||
| คอมปัส 1 | 2001 | การเดินรถแบบไร้คนขับบนทางรถไฟสายหลัก[ 43 ] | เยอรมนี | 4.85 ล้านยูโร[ 44 ] | |
| ออโต้บาห์น | 2010 | 2014 | รถไฟอัตโนมัติบนเส้นทางรถไฟภูมิภาคที่มีอยู่[ 45 ] | ออสเตรีย | 2.5 ล้านยูโร[ 45 ] |
| อาร์ซีเอส | 2010 | การหลีกเลี่ยงการชนโดยไม่ต้องติดตั้งถาวร[ 46 ] | เยอรมนี | ||
| เรลไดรวี® | 2019 | รถทดสอบสำหรับถนนและทางรถไฟ[ 47 ] | เยอรมนี | ||
| KI-Lok | 2021 | 2024 | AI ที่ปลอดภัยสำหรับทางรถไฟ[ 48 ] | เยอรมนี | 2.47 ล้านยูโร[ 44 ] |
| สมาร์ท 2 | 2019 | 2022 | ระบบตรวจจับสิ่งกีดขวางและการบุกรุกรางแบบบูรณาการขั้นสูงสำหรับระบบอัตโนมัติอัจฉริยะของการขนส่งทางราง[ 49 ] | สหภาพยุโรป | 1.7 ล้านยูโร[ 49 ] |
| ความเสี่ยงของ ATO | 2020 | 2023 | เกณฑ์การยอมรับความเสี่ยงสำหรับการทำงานของรถไฟอัตโนมัติ[ 50 ] | เยอรมนี | 0.499 ล้านยูโร[ 44 ] |
| เอทีโอ เซนส์ | 2020 | 2023 | ข้อกำหนดการทำงานสำหรับเซ็นเซอร์และตรรกะของระบบ ATO [ 51 ] | เยอรมนี | 1.176 ล้านยูโร[ 44 ] |
| เซฟเอ็กซ์เพลน | 2022 | 2025 | ระบบฝังตัวที่สำคัญที่ปลอดภัยและอธิบายได้โดยใช้ AI [ 52 ] | สหภาพยุโรป | 3.891 ล้านยูโร[ 52 ] |
| การยอมรับ GoA3+ | 2023 | 2025 | เงื่อนไขการยอมรับสำหรับการขนส่งทางรางอัตโนมัติ[ 53 ] [ 54 ] | เยอรมนี | |
| OSDAR23 | 2021 | 2021 | การพัฒนาชุดข้อมูลสำหรับการประยุกต์ใช้การขับขี่อัตโนมัติในการดำเนินงานทางรถไฟ[ 55 ] | เยอรมนี | 0.089 ล้านยูโร[ 44 ] |
| การฝึกอบรมที่ปลอดภัย | 2022 | การพัฒนาขบวนรถไฟอัตโนมัติที่เปิดใช้งาน AI [ 56 ] | เยอรมนี | 24 ล้านยูโร | |
| รถไฟอัตโนมัติ | 2023 | การจัดเตรียมและการจอดรถไฟแบบอัตโนมัติเต็มรูปแบบ[ 57 ] | สหภาพยุโรป | 42.6 ล้านยูโร[ 58 ] | |
| อาร์2ดาโต้ | 2023 | รางสู่ระบบดิจิทัลอัตโนมัติจนถึงการเดินรถไฟอัตโนมัติ[ 59 ] | สหภาพยุโรป | 160.8 ล้านยูโร | |
| เอทีโอ เอ็นดูแรนซ์ | 2022 | 2024 | ATO Endurance [ 60 ] [ 61 ] | เนเธอร์แลนด์ | |
| ระบบสับเปลี่ยนอัตโนมัติ ATO | 2022 | 2024 | การสับเปลี่ยนอัตโนมัติของ ATO [ 60 ] [ 61 ] | เนเธอร์แลนด์ | |
| ดิจิเรล | 2025 | โครงการนำร่อง ATO ที่ Kouvola - Kotka - Hamina ETCS รางทดสอบ[ 62 ] [ 63 ] | ฟินแลนด์ |
อนาคต
ในเดือนตุลาคม พ.ศ. 2564 โครงการนำร่อง "รถไฟอัตโนมัติไร้คนขับขบวนแรกของโลก" บนรางปกติที่ใช้ร่วมกับการขนส่งทางรถไฟอื่นๆ ได้เปิดตัวในเมืองฮัมบูร์ก ประเทศเยอรมนี เทคโนโลยีรถไฟธรรมดาบนรางมาตรฐานที่ไม่ใช่รถไฟใต้ดินนั้น ตามรายงานระบุว่า ในทางทฤษฎีแล้วสามารถนำไปใช้กับการขนส่งทางรถไฟทั่วโลกได้ และยัง ประหยัดพลังงานมากกว่าอย่างมากอีกด้วย[ 64 ] [ 65 ]
ATO ได้รับการแนะนำในสาย Circle , District , Hammersmith & CityและMetropolitan ของรถไฟใต้ดินลอนดอนภายในปี 2022 ATO ถูกใช้ในบางส่วนของCrossrailรถไฟในส่วนใจกลางลอนดอนของThameslinkเป็นขบวนแรกที่ใช้ ATO ในเครือข่ายรถไฟสายหลักของสหราชอาณาจักร[ 66 ]ด้วยETCSระดับ 2
ในเดือนเมษายน พ.ศ. 2565 JR Westประกาศว่าจะทดสอบ ATO บน รถไฟ ชินคัน เซ็นซีรีส์ W7 จำนวน 12 โบกี้ ที่ใช้ในเส้นทางชินคันเซ็นโฮคุริคุที่อู่รถไฟฮาคุซันตลอดปี พ.ศ. 2565 [ 67 ]
เส้นทางทั้งหมดที่สร้างขึ้นสำหรับรถไฟฟ้าใต้ดินซิดนีย์ สายใหม่ นั้นใช้ระบบขับเคลื่อนอัตโนมัติโดยไม่มีเจ้าหน้าที่ควบคุมดูแล
ตั้งแต่ปี 2012 รถไฟใต้ดินโทรอนโตได้รับการอัปเกรดสัญญาณเพื่อใช้ ATO และ ATC ในอีกทศวรรษต่อมา[ 68 ]งานได้เสร็จสมบูรณ์แล้วในส่วนของสายYonge–University [ 69 ]ส่วนใต้ดินของสาย 5 Eglintonได้รับการติดตั้ง ATC และ ATO ในปี 2022 ส่วนใต้ดินจะใช้ระบบ GoA2 ในขณะที่ศูนย์ซ่อมบำรุงและจัดเก็บ Eglintonจะใช้ระบบ GoA4 และเดินทางแบบไร้คนขับรอบลานจอดรถ[ 70 ]สายOntarioเสนอให้ใช้ระบบไร้คนขับ GoA4 และจะเปิดให้บริการในปี 2030 [ 71 ]
ตั้งแต่เดือนมีนาคม 2021 SNCFและ ภูมิภาค โอต์-เดอ-ฟรองซ์ได้เริ่มทดลองใช้รถไฟรุ่นRegio 2N ของฝรั่งเศส ซึ่งติดตั้งเซ็นเซอร์และซอฟต์แวร์ (fr)
ในปี 2025 AŽD Prahaจะเปิดให้บริการผู้โดยสารไร้คนขับเป็นประจำบนเส้นทางจากKopidlnoไปยังDolní Bousov [ 72 ]
รถไฟใต้ดินเวียนนา (U-Bahn)มีกำหนดติดตั้งระบบควบคุมอัตโนมัติแบบไร้คนขับ (ATO) ในปี 2026 บนสาย U5 ใหม่
ในโครงการนำร่องของ Digirail รถไฟ Stadler FLIRT สองขบวน (Sm5) จะถูกติดตั้ง ATO (และ ETCS) เพื่อวัตถุประสงค์ในการทดสอบโดย Siemens Mobility [ 62 ] [ 63 ]
ดูเพิ่มเติม
- ระบบอัตโนมัติของรถไฟใต้ดินลอนดอน
- ระบบควบคุมรถไฟโดยใช้การสื่อสาร – ระบบส่งสัญญาณแบบเคลื่อนที่ที่สามารถใช้เพื่อควบคุมการเดินรถไฟโดยอัตโนมัติ
- การเดินรถโดยคนเพียงคนเดียว – วิธีการเดินรถไฟวิธีหนึ่ง ซึ่งบางครั้งถูกมองว่าเป็นขั้นตอนกลางไปสู่ระบบอัตโนมัติที่มากขึ้น
- ระบบส่งสัญญาณของรถไฟใต้ดินนครนิวยอร์ก #ระบบอัตโนมัติ
- ระบบควบคุมการหยุดรถไฟอัตโนมัติ – ระบบเบรกอัตโนมัติที่ใช้ในเส้นทางรถไฟบางสายของญี่ปุ่น สามารถใช้งานร่วมกับ ATO (Automatic Transit Operation) ได้เช่นกัน โดยใช้ฟังก์ชันเบรกอัตโนมัติของระบบนี้
- ระบบอัตโนมัติสำหรับยานยนต์
- รถบัสนำทาง
- ระบบขนส่งมวลชนอัตโนมัติความเร็วสูง (ART)
อ่านเพิ่มเติม
- หวัง ชุนจุน (2026). การควบคุมรถไฟโดยใช้การสื่อสาร เล่ม 1: พื้นฐานและสถาปัตยกรรมทางเทคนิค . พรินซ์ตัน รัฐนิวเจอร์ซีย์: สำนักพิมพ์อิสระ. ISBN 979-8-258-54295-3.— บทที่ 4 (อุปกรณ์บนเรือ) ครอบคลุมสถาปัตยกรรม ATO และอัลกอริธึมเส้นโค้งการเบรก บทที่ 8 (ระดับของระบบอัตโนมัติ) ครอบคลุมกรอบงาน GoA 0–4 และความแตกต่างระหว่าง ATO/CBTC
ลิงก์ภายนอก
- การทดสอบระบบตรวจจับสิ่งกีดขวางบนรถไฟโครงการ Robotrain บริษัท AZD Praha
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ การเดินรถไฟอัตโนมัติ
การเดินรถไฟอัตโนมัติ ( ATO ) เป็นวิธีการเดิน รถไฟ โดยอัตโนมัติ ซึ่งไม่จำเป็นต้องมีคนขับหรือต้องการการดูแลเพียงเล็กน้อยเท่านั้น [ 1 ] หรืออีกนัยหนึ่ง ATO...
ประเภทเพิ่มเติม
ระดับของระบบอัตโนมัติ คำอธิบายและตัวอย่าง โกเอ1+ นอกจาก GoA1 แล้ว ยังมีการเพิ่มประสิทธิภาพการใช้พลังงานบนรถไฟที่เชื่อมต่อ (C-DAS) ผ่านETCS อีก ด้วย [ 13 ] โกเอ2+ ในกรณีของ รถไฟใต้ดินอัมสเตอร์ดัม GoA2 สามารถกลับทิศทางใน GoA4 ได้ที่สถานีปลายทาง [ 14 ]...
การดำเนินงานของ ATO
ระบบที่ทันสมัยหลายระบบเชื่อมโยงกับ ระบบป้องกันรถไฟอัตโนมัติ (ATP) และในหลายกรณีก็เชื่อม โยงกับ ระบบควบคุมรถไฟอัตโนมัติ (ATC) ซึ่ง ระบบจะดำเนินการส่ง สัญญาณ ตามปกติ เช่น การกำหนดเส้นทางและการควบคุมรถไฟ ระบบ ATC และ ATP...
ข้อดีของ GoA3+
ในปี 2021 กรมการขนส่งของรัฐฟลอริดา ได้ให้ทุนสนับสนุนการตรวจสอบโดยนักวิทยาศาสตร์จาก มหาวิทยาลัยแห่งรัฐฟลอริดา มหาวิทยาลัย ทัลกา และ มหาวิทยาลัยโพลีเทคนิคฮ่องกง ซึ่งแสดงให้เห็นถึงข้อดีของรถไฟอัตโนมัติดังต่อไปนี้: [ 22 ]