อ่าน 9 นาที
การควบคุมรถไฟโดยใช้การสื่อสาร
ระบบ ควบคุมการเดินรถโดยใช้การสื่อสาร ( CBTC ) คือ ระบบ ส่งสัญญาณทางรถไฟ ที่ใช้ การสื่อสาร ระหว่าง รถไฟ และอุปกรณ์บนรางเพื่อการจัดการจราจรและการควบคุมโครงสร้างพื้นฐาน CBTC...
การควบคุมรถไฟโดยใช้การสื่อสาร


| การจราจรบนรางอัตโนมัติ |
|---|
| การเดินรถไฟอัตโนมัติ |
| รายชื่อระบบรถไฟอัตโนมัติ |
| หัวข้อที่เกี่ยวข้อง |
ระบบ ควบคุมการเดินรถโดยใช้การสื่อสาร ( CBTC ) คือ ระบบ ส่งสัญญาณทางรถไฟที่ใช้การสื่อสารระหว่างรถไฟและอุปกรณ์บนรางเพื่อการจัดการจราจรและการควบคุมโครงสร้างพื้นฐาน CBTC ช่วยให้ทราบตำแหน่งของรถไฟได้แม่นยำกว่าระบบส่งสัญญาณแบบดั้งเดิม ซึ่งสามารถทำให้การจัดการจราจรทางรถไฟปลอดภัยและมีประสิทธิภาพมากขึ้น ระบบ ขนส่งมวลชนความเร็วสูง (และระบบรถไฟอื่นๆ) สามารถลดระยะห่างระหว่างขบวนรถ ได้ ในขณะที่ยังคงรักษาหรือแม้แต่ปรับปรุงความปลอดภัยให้ดี ยิ่งขึ้น
ระบบ CBTC คือ " ระบบ ควบคุมรถไฟอัตโนมัติ แบบต่อเนื่อง ที่ใช้การกำหนดตำแหน่งรถไฟที่มีความละเอียดสูง ซึ่งเป็นอิสระจากวงจรรางการสื่อสารข้อมูลแบบสองทิศทางระหว่างรถไฟกับอุปกรณ์ข้างทางที่มีความจุสูงและต่อเนื่อง และตัวประมวลผล บนรถไฟและข้างทาง ที่สามารถใช้ งานฟังก์ชัน การป้องกันรถไฟอัตโนมัติ (ATP) รวมถึง ฟังก์ชัน การทำงานของรถไฟอัตโนมัติ (ATO) และ การกำกับ ดูแลรถไฟอัตโนมัติ ( ATS ) ที่เป็นตัวเลือก" ตามที่กำหนดไว้ใน มาตรฐาน IEEE 1474 [ 1 ]
ภูมิหลังและที่มา
CBTC เป็นมาตรฐานการส่งสัญญาณที่กำหนดโดย มาตรฐาน IEEE 1474 [ 1 ]เวอร์ชันดั้งเดิมเปิดตัวในปี 1999 และได้รับการปรับปรุงในปี 2004 [ 1 ]จุดมุ่งหมายคือการสร้างความสอดคล้องและมาตรฐานระหว่างระบบส่งสัญญาณรถไฟดิจิทัลที่ช่วยให้สามารถเพิ่มความจุของรถไฟผ่านสิ่งที่มาตรฐานกำหนดไว้ว่าเป็นการกำหนดตำแหน่งรถไฟที่มีความละเอียดสูง[ 1 ]ดังนั้นมาตรฐานจึงไม่กำหนดให้ใช้ การส่งสัญญาณรถไฟ แบบบล็อกเคลื่อนที่แต่ในทางปฏิบัติแล้วนี่คือการจัดเรียงที่พบได้บ่อยที่สุด[ 2 ] [ 3 ] [ 4 ] [ 5 ] [ 6 ] [ 7 ]
บล็อกเคลื่อนที่
ระบบสัญญาณแบบดั้งเดิมจะตรวจจับรถไฟในส่วนต่างๆ ของรางที่เรียกว่า ' บล็อก ' โดยแต่ละบล็อกจะมีสัญญาณป้องกันเพื่อไม่ให้รถไฟเข้าไปในบล็อกที่มีรถไฟอยู่แล้ว เนื่องจากแต่ละบล็อกเป็นส่วนของรางที่กำหนดไว้ ระบบเหล่านี้จึงเรียกว่าระบบบล็อกคงที่[ 8 ]
ในระบบ CBTC แบบบล็อกเคลื่อนที่ ส่วนที่ได้รับการป้องกันสำหรับรถไฟแต่ละขบวนคือ "บล็อก" ที่เคลื่อนที่ไปพร้อมกับรถไฟและตามหลังรถไฟ และให้การสื่อสารอย่างต่อเนื่องเกี่ยวกับตำแหน่งที่แน่นอนของรถไฟผ่านทางวิทยุ วงจรเหนี่ยวนำ ฯลฯ[ 9 ]

ด้วยเหตุนี้Bombardierจึงเปิดระบบ CBTC ที่ใช้คลื่นวิทยุแห่งแรกของโลกที่ ระบบ ขนส่งผู้โดยสารอัตโนมัติ (APM) ของสนามบินซานฟรานซิสโก ในเดือนกุมภาพันธ์ พ.ศ. 2546 [ 10 ]ไม่กี่เดือนต่อมา ในเดือนมิถุนายน พ.ศ. 2546 Alstomได้นำเทคโนโลยีคลื่นวิทยุมาประยุกต์ใช้กับระบบรถไฟบนสายNorth East Line ของสิงคโปร์ CBTC มีต้นกำเนิดมาจาก ระบบ แบบลูปที่พัฒนาโดยAlcatel SEL (ต่อมาคือThalesปัจจุบันคือHitachi Rail ) สำหรับ ระบบ Bombardier Automated Rapid Transit (ART) ในแคนาดาในช่วงกลางทศวรรษ 1980
ระบบเหล่านี้ ซึ่งเรียกอีกอย่างว่าระบบควบคุมรถไฟแบบส่งสัญญาณ (Transmission-Based Train Controlหรือ TBTC) ใช้ เทคนิคการส่งสัญญาณ แบบเหนี่ยวนำเพื่อสื่อสารระหว่างรางกับรถไฟ โดยนำเสนอทางเลือกใหม่แทน การสื่อสารแบบ วงจรบนรางเทคโนโลยีนี้ทำงานใน ช่วง ความถี่ 30–60 kHz เพื่อสื่อสารระหว่างรถไฟและอุปกรณ์ข้างทาง และได้รับการยอมรับอย่างกว้างขวางจาก ผู้ให้บริการ รถไฟใต้ดินแม้จะมี ปัญหา เรื่องความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC) รวมถึงข้อกังวลด้านการติดตั้งและการบำรุงรักษาอื่นๆ (ดูSelTracสำหรับข้อมูลเพิ่มเติมเกี่ยวกับระบบควบคุมรถไฟแบบส่งสัญญาณ)
เช่นเดียวกับการประยุกต์ใช้เทคโนโลยีใหม่ ๆ ปัญหาบางอย่างก็เกิดขึ้นในช่วงเริ่มต้น โดยส่วนใหญ่เกิดจากปัญหาด้านความเข้ากันได้และการทำงานร่วมกัน[ 11 ] [ 12 ]อย่างไรก็ตาม มีการปรับปรุงที่สำคัญเกิดขึ้นนับตั้งแต่นั้นมา และปัจจุบันความน่าเชื่อถือของระบบสื่อสารทางวิทยุได้เพิ่มขึ้นอย่างมาก
นอกจากนี้ สิ่งสำคัญคือต้องเน้นย้ำว่าไม่ใช่ทุกระบบที่ใช้ เทคโนโลยี การสื่อสารทางวิทยุจะถือว่าเป็นระบบ CBTC ดังนั้น เพื่อความชัดเจนและเพื่อให้สอดคล้องกับ โซลูชัน ที่ทันสมัยสำหรับความต้องการของผู้ปฏิบัติงาน[ 12 ] บทความนี้จึงครอบคลุมเฉพาะโซลูชัน CBTC ที่ใช้หลักการ บล็อกเคลื่อนที่ล่าสุด(ไม่ว่าจะเป็นบล็อกเคลื่อนที่ จริง หรือบล็อกเสมือนดังนั้นจึงไม่ขึ้นอยู่กับการตรวจจับรถไฟตามราง) [ 1 ]ที่ใช้การสื่อสารทางวิทยุ
คุณสมบัติหลัก
CBTC และบล็อกเคลื่อนที่
ระบบ CBTC เป็นระบบส่งสัญญาณทางรถไฟที่ทันสมัย ซึ่งส่วนใหญ่ใช้ในเส้นทางรถไฟในเมือง (ทั้งรถไฟขนาดเล็กและขนาดใหญ่ ) และรถไฟ APMแม้ว่าจะสามารถใช้ในเส้นทางรถไฟชานเมือง ได้เช่นกัน สำหรับเส้นทางหลักระบบที่คล้ายกันอาจเป็นระบบการจัดการจราจรทางรถไฟของยุโรป ERTMS ระดับ 3 (ยังไม่ได้กำหนดอย่างสมบูรณ์) ในระบบ CBTC ที่ทันสมัย รถไฟจะคำนวณและสื่อสารสถานะของตนอย่างต่อเนื่องผ่านทางวิทยุไปยังอุปกรณ์ข้างทางที่กระจายอยู่ตามเส้นทาง สถานะนี้รวมถึงพารามิเตอร์ต่างๆ เช่น ตำแหน่งที่แน่นอน ความเร็ว ทิศทางการเดินทาง และระยะเบรก
ข้อมูลนี้ช่วยให้สามารถคำนวณพื้นที่ที่รถไฟอาจใช้บนรางได้ นอกจากนี้ยังช่วยให้อุปกรณ์ข้างทางสามารถกำหนดจุดบนเส้นทางที่รถไฟขบวนอื่นห้ามวิ่งผ่านได้ จุดเหล่านี้จะถูกส่งต่อไปยังรถไฟเพื่อให้ปรับความเร็วโดยอัตโนมัติและต่อเนื่อง ในขณะที่ยังคงรักษาความปลอดภัยและความสะดวกสบาย ( การกระชาก ) ตามข้อกำหนด ดังนั้น รถไฟจึงได้รับข้อมูลเกี่ยวกับระยะห่างจากรถไฟขบวนหน้าอย่างต่อเนื่อง และสามารถปรับระยะห่างเพื่อความปลอดภัยได้ตามนั้น
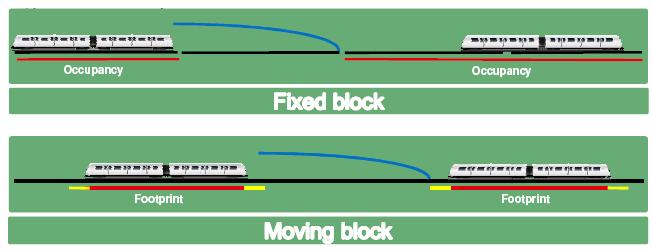
จาก มุมมอง ของระบบส่งสัญญาณรูปแรกแสดงจำนวนช่องจอดทั้งหมดของขบวนรถไฟนำ โดยรวมช่องจอด ทั้งหมด ที่ขบวนรถไฟนั้นอยู่ด้วย เนื่องจากระบบไม่สามารถทราบได้อย่างแน่ชัดว่าขบวนรถไฟอยู่ที่ใดในช่องจอด เหล่านั้น ดังนั้น ระบบ ช่องจอดคงที่จึงอนุญาตให้ขบวนรถไฟที่ตามมาเคลื่อนที่ได้จนถึงขอบเขตของ ช่องจอด ว่างสุดท้ายเท่านั้น
ใน ระบบ บล็อกเคลื่อนที่ดังแสดงในรูปที่สอง ตำแหน่งของรถไฟและเส้นโค้งการเบรกจะถูกคำนวณอย่างต่อเนื่องโดยรถไฟ จากนั้นจึงสื่อสารผ่านวิทยุไปยังอุปกรณ์ข้างทาง ดังนั้น อุปกรณ์ข้างทางจึงสามารถกำหนดพื้นที่ป้องกัน ซึ่งแต่ละพื้นที่เรียกว่า ขีดจำกัดอำนาจการเคลื่อนที่ (LMA) จนถึงสิ่งกีดขวางที่ใกล้ที่สุด (ในรูปคือท้ายรถไฟข้างหน้า) อำนาจการเคลื่อนที่ (MA) คือการอนุญาตให้รถไฟเคลื่อนที่ไปยังตำแหน่งที่กำหนดภายในข้อจำกัดของโครงสร้างพื้นฐานและภายใต้การควบคุมความเร็ว[ 13 ]
จุดสิ้นสุดอำนาจคือตำแหน่งที่รถไฟได้รับอนุญาตให้วิ่งต่อไปได้ และความเร็วเป้าหมายเท่ากับศูนย์ จุดสิ้นสุดการเคลื่อนที่คือตำแหน่งที่รถไฟได้รับอนุญาตให้วิ่งต่อไปได้ตาม MA เมื่อส่ง MA จะเป็นจุดสิ้นสุดของส่วนสุดท้ายที่ระบุไว้ใน MA [ 13 ]
สิ่งสำคัญที่ต้องกล่าวถึงคือ การคำนวณจำนวนผู้โดยสารในระบบเหล่านี้จะต้องรวมระยะเผื่อความปลอดภัยสำหรับความไม่แน่นอนของตำแหน่ง (แสดงด้วยสีเหลืองในรูป) ที่เพิ่มเข้าไปในความยาวของขบวนรถไฟ ทั้งสองส่วนนี้รวมกันเป็นสิ่งที่โดยทั่วไปเรียกว่า 'พื้นที่ให้บริการ' (Footprint) ระยะเผื่อความปลอดภัยนี้ขึ้นอยู่กับความแม่นยำของ ระบบ วัดระยะทางในขบวนรถไฟ
ระบบ CBTC ที่ใช้บล็อกเคลื่อนที่ช่วยลดระยะห่างเพื่อความปลอดภัยระหว่างรถไฟสองขบวนที่วิ่งติดกัน ระยะห่างนี้จะเปลี่ยนแปลงไปตามการอัปเดตตำแหน่งและความเร็วของรถไฟอย่างต่อเนื่อง โดยยังคงรักษา ระดับ ความปลอดภัยไว้ ส่งผลให้ระยะห่างระหว่างรถไฟที่วิ่งติดกันลดลง และเพิ่มประสิทธิภาพ การ ขนส่ง
ระดับของระบบอัตโนมัติ
ระบบ CBTC สมัยใหม่ช่วยให้สามารถใช้งานระบบอัตโนมัติได้หลายระดับหรือเกรดของระบบอัตโนมัติ (GoA) ตามที่กำหนดและจำแนกประเภทไว้ในIEC 62290–1 [ 14 ]ในความเป็นจริง CBTC ไม่ใช่คำพ้องความหมายกับ " รถไฟไร้คนขับ " หรือ "รถไฟอัตโนมัติ" แม้ว่าจะถือว่าเป็นเทคโนโลยีพื้นฐานที่ช่วยให้สามารถใช้งานระบบดังกล่าวได้ก็ตาม
มีระบบอัตโนมัติให้เลือกใช้ 4 ระดับ:
- GoA 0 – ปฏิบัติงาน ณ สถานที่จริง โดยไม่มีระบบอัตโนมัติ
- GoA 1 – ระบบควบคุมแบบแมนนวล โดยคนขับควบคุมการเดินรถทั้งหมด
- GoA 2 – ระบบการทำงานแบบกึ่งอัตโนมัติ (STO) การสตาร์ทและดับเครื่องยนต์เป็นระบบอัตโนมัติ แต่คนขับที่นั่งอยู่ในห้องโดยสารจะควบคุมประตูและขับรถในกรณีฉุกเฉิน
- GoA 3 – รถไฟไร้คนขับ (DTO) การออกตัวและหยุดรถเป็นระบบอัตโนมัติ แต่จะมีพนักงานควบคุมประตูจากภายในขบวนรถ
- GoA 4 – การเดินรถไฟอัตโนมัติ (UTO) การออกตัว การหยุด และประตูทั้งหมดเป็นระบบอัตโนมัติ โดยไม่จำเป็นต้องมีพนักงานประจำรถไฟอยู่บนรถไฟ
การใช้งานหลัก
ระบบ CBTC ช่วยให้สามารถใช้โครงสร้างพื้นฐานทางรถไฟได้อย่างเหมาะสมที่สุด รวมถึงบรรลุความจุ สูงสุด และระยะห่าง ขั้นต่ำ ระหว่างขบวนรถไฟที่วิ่ง ในขณะที่ยังคงรักษา ข้อกำหนดด้าน ความปลอดภัยระบบเหล่านี้เหมาะสำหรับเส้นทางรถไฟในเมืองที่มีความต้องการสูงรุ่นใหม่ แต่ยังสามารถนำมาวางทับบนเส้นทางที่มีอยู่เดิมเพื่อปรับปรุงประสิทธิภาพได้อีกด้วย[ 5 ]
แน่นอนว่าในกรณีของการปรับปรุงสายที่มีอยู่แล้ว ขั้นตอนการออกแบบ การติดตั้ง การทดสอบ และการใช้งานจะมีความสำคัญมากยิ่งขึ้น ส่วนใหญ่เป็นเพราะความท้าทายในการใช้งานระบบที่อยู่ด้านบนโดยไม่รบกวนการให้บริการ[ 15 ]
ประโยชน์หลัก
วิวัฒนาการของเทคโนโลยีและประสบการณ์ที่ได้รับจากการใช้งานตลอด 30 ปีที่ผ่านมา ส่งผลให้ระบบ CBTC ที่ทันสมัยมีความน่าเชื่อถือและมีโอกาสเกิดความล้มเหลวน้อยกว่าระบบควบคุมรถไฟแบบเก่า ระบบ CBTC โดยทั่วไปจะมีอุปกรณ์ข้างทางน้อยกว่า และเครื่องมือวินิจฉัยและตรวจสอบได้รับการปรับปรุงให้ดีขึ้น ทำให้สามารถนำไปใช้งานได้ง่ายขึ้น และที่สำคัญกว่านั้นคือบำรุงรักษาได้ง่ายขึ้น[ 16 ]
เทคโนโลยี CBTC กำลังพัฒนาอย่างต่อเนื่อง โดยใช้เทคนิคและส่วนประกอบล่าสุดเพื่อนำเสนอระบบที่มีขนาดกะทัดรัดยิ่งขึ้นและโครงสร้างที่เรียบง่ายกว่าเดิม ตัวอย่างเช่น ด้วยการพัฒนาอุปกรณ์อิเล็กทรอนิกส์สมัยใหม่ ทำให้สามารถสร้างระบบสำรองได้ เพื่อให้ความล้มเหลวเพียงครั้งเดียวไม่ส่งผลกระทบต่อความพร้อมใช้งานในการปฏิบัติงานมากนัก
ยิ่งไปกว่านั้น ระบบเหล่านี้ยังมีความยืดหยุ่นอย่างสมบูรณ์ในแง่ของตารางการปฏิบัติงานหรือตารางเวลา ทำให้ผู้ให้บริการรถไฟในเมืองสามารถตอบสนองต่อความต้องการการจราจรเฉพาะได้อย่างรวดเร็วและมีประสิทธิภาพมากขึ้น และแก้ไขปัญหาการจราจรติดขัดได้ อันที่จริง ระบบการทำงานอัตโนมัติมีศักยภาพที่จะลดระยะห่างระหว่างขบวนรถและปรับปรุงความจุการจราจร ได้อย่างมีนัยสำคัญ เมื่อเทียบกับระบบขับเคลื่อนด้วยตนเอง[ 17 ] [ 18 ]
สุดท้ายนี้ สิ่งสำคัญคือต้องกล่าวถึงว่าระบบ CBTC ได้รับการพิสูจน์แล้วว่ามีประสิทธิภาพด้านพลังงานมากกว่าระบบขับเคลื่อนด้วยตนเองแบบดั้งเดิม[ 16 ]การใช้ฟังก์ชันการทำงานใหม่ เช่น กลยุทธ์การขับขี่อัตโนมัติ หรือการปรับข้อเสนอการขนส่งให้เข้ากับความต้องการที่แท้จริงได้ดียิ่งขึ้น ช่วยให้ประหยัดพลังงานได้อย่างมาก ลดการใช้พลังงานลง
ความเสี่ยง
ความเสี่ยงหลักของระบบควบคุมรถไฟอิเล็กทรอนิกส์คือ หากการเชื่อมต่อการสื่อสารระหว่างรถไฟขบวนใดขบวนหนึ่งหยุดชะงัก ระบบทั้งหมดหรือบางส่วนอาจต้องเข้าสู่ สถานะ ปลอดภัยจนกว่าจะแก้ไขปัญหาได้ ขึ้นอยู่กับความรุนแรงของการสูญเสียการสื่อสาร สถานะนี้อาจมีตั้งแต่รถไฟลดความเร็วชั่วคราว หยุด หรือทำงานในโหมดที่ลดประสิทธิภาพลงจนกว่าการสื่อสารจะกลับมาใช้งานได้อีกครั้ง หากการสื่อสารหยุดชะงักอย่างถาวร จะต้องมีการดำเนินการ ตามแผนฉุกเฉิน บางอย่าง ซึ่งอาจประกอบด้วยการดำเนินการด้วยตนเองโดยใช้บล็อกสัมบูรณ์หรือในกรณีที่เลวร้ายที่สุดคือ การเปลี่ยนไปใช้รูปแบบการ ขนส่งอื่น[ 19 ]
ด้วยเหตุนี้ ความพร้อมใช้งานสูงของระบบ CBTC จึงมีความสำคัญอย่างยิ่งต่อการทำงานที่เหมาะสม โดยเฉพาะอย่างยิ่งหากระบบดังกล่าวถูกนำมาใช้เพื่อเพิ่มขีดความสามารถในการขนส่งและลดช่วงเวลาการรอรถ ระบบสำรองและกลไกการกู้คืนจึงต้องได้รับการตรวจสอบอย่างละเอียดถี่ถ้วนเพื่อให้การทำงานมีความแข็งแกร่งสูง นอกจากความพร้อมใช้งานที่เพิ่มขึ้นของระบบ CBTC แล้ว ยังจำเป็นต้องมีการฝึกอบรมอย่างครอบคลุมและการทบทวนขั้นตอนการกู้คืน สำหรับผู้ปฏิบัติงานระบบเป็นระยะๆ อันที่จริง หนึ่งในอันตรายหลักของระบบ CBTC คือความน่าจะเป็นของความผิดพลาดของมนุษย์และการประยุกต์ใช้ขั้นตอนการกู้คืนที่ไม่ถูกต้องหากระบบไม่สามารถใช้งานได้
ความล้มเหลวในการสื่อสารอาจเกิดจากอุปกรณ์ทำงานผิดปกติการรบกวนทางแม่เหล็กไฟฟ้าความแรงของสัญญาณอ่อน หรือการอิ่มตัวของสื่อการสื่อสาร[ 20 ]ในกรณีนี้ การหยุดชะงักอาจส่งผลให้ต้องใช้เบรกบริการหรือเบรกฉุกเฉินเนื่องจากความตระหนักรู้สถานการณ์แบบเรียลไทม์เป็นข้อกำหนดด้านความปลอดภัยที่สำคัญสำหรับ CBTC และหากการหยุดชะงักเหล่านี้เกิดขึ้นบ่อยครั้ง อาจส่งผลกระทบอย่างร้ายแรงต่อการให้บริการ นี่คือเหตุผลที่ในอดีต ระบบ CBTC ได้นำระบบการสื่อสารทางวิทยุมาใช้เป็นครั้งแรกในปี 2546 เมื่อเทคโนโลยีที่จำเป็นมีความพร้อมเพียงพอสำหรับการใช้งานที่สำคัญ
ในระบบที่มีทัศนวิสัย ไม่ดี หรือมีข้อจำกัดด้านคลื่นความถี่/แบนด์วิดท์ อาจจำเป็นต้องใช้ทรานสปอนเดอร์จำนวนมากกว่าที่คาดการณ์ไว้เพื่อเพิ่มประสิทธิภาพการให้บริการ โดยปกติแล้วปัญหานี้มักเกิดขึ้นกับการนำ CBTC ไปใช้กับระบบขนส่งสาธารณะที่มีอยู่แล้วในอุโมงค์ ซึ่งไม่ได้ออกแบบมาเพื่อรองรับระบบนี้ตั้งแต่แรก วิธีการอื่นในการปรับปรุงความพร้อมใช้งานของระบบในอุโมงค์คือการใช้สายเคเบิลป้อนสัญญาณแบบรั่ว ซึ่งแม้จะมีต้นทุนเริ่มต้นสูงกว่า (วัสดุ + การติดตั้ง) แต่ก็ให้การเชื่อมต่อวิทยุที่เชื่อถือได้มากกว่า
ด้วยบริการที่กำลังเกิดขึ้นใหม่บนแถบความถี่วิทยุ ISM แบบเปิด (เช่น 2.4 GHz และ 5.8 GHz) และความเป็นไปได้ที่จะเกิดการหยุดชะงักของบริการ CBTC ที่สำคัญ ทำให้เกิดแรงกดดันเพิ่มขึ้นในประชาคมระหว่างประเทศ (อ้างอิงรายงาน 676 ขององค์กร UITP เรื่องการสงวนคลื่นความถี่สำหรับแอปพลิเคชันด้านความปลอดภัยที่สำคัญสำหรับระบบรถไฟในเมือง) ให้สงวนแถบความถี่เฉพาะสำหรับระบบรถไฟในเมืองที่ใช้คลื่นวิทยุ การตัดสินใจดังกล่าวจะช่วยสร้างมาตรฐานให้กับระบบ CBTC ทั่วทั้งตลาด (ซึ่งเป็นความต้องการที่เพิ่มขึ้นจากผู้ให้บริการส่วนใหญ่) และรับประกันความพร้อมใช้งานสำหรับระบบที่สำคัญเหล่านั้น
เนื่องจากระบบ CBTC จำเป็นต้องมีความพร้อมใช้งานสูงและโดยเฉพาะอย่างยิ่ง ต้องยอมให้ระบบทำงานลดลงอย่างค่อยเป็นค่อยไป จึงอาจจัดให้มีวิธีการส่งสัญญาณสำรองเพื่อให้มั่นใจได้ว่าบริการจะไม่ลดลงในระดับหนึ่งเมื่อระบบ CBTC ไม่พร้อมใช้งานบางส่วนหรือทั้งหมด[ 21 ]ซึ่งมีความเกี่ยวข้องอย่างยิ่งสำหรับการใช้งานในพื้นที่เดิม (สายที่มีระบบส่งสัญญาณอยู่แล้ว) ซึ่งการออกแบบโครงสร้างพื้นฐานไม่สามารถควบคุมได้ และจำเป็นต้องมีการใช้งานร่วมกับระบบเดิมอย่างน้อยชั่วคราว[ 22 ]
ตัวอย่างเช่นสาย BMT Canarsieในนิวยอร์กซิตี้ได้รับการติดตั้ง ระบบ สัญญาณบล็อกอัตโนมัติ สำรอง ที่สามารถรองรับรถไฟได้ 12 ขบวนต่อชั่วโมง (tph) เมื่อเทียบกับ 26 tph ของระบบ CBTC แม้ว่านี่จะเป็นสถาปัตยกรรมที่ค่อนข้างพบได้ทั่วไปสำหรับโครงการปรับปรุงระบบสัญญาณ แต่ก็อาจทำให้การประหยัดต้นทุนของ CBTC ลดลงหากนำไปใช้กับสายใหม่ นี่เป็นประเด็นสำคัญในการพัฒนาระบบ CBTC (และยังคงมีการอภิปรายกันอยู่) เนื่องจากผู้ให้บริการและผู้ดำเนินการบางรายโต้แย้งว่าสถาปัตยกรรมที่ซ้ำซ้อนอย่างสมบูรณ์ของระบบ CBTC อาจบรรลุค่าความพร้อมใช้งานสูงได้ด้วยตัวเอง[ 22 ]
โดยหลักการแล้ว ระบบ CBTC อาจได้รับการออกแบบโดยใช้ระบบควบคุมดูแลแบบรวมศูนย์ เพื่อปรับปรุงการบำรุงรักษาและลดต้นทุนการติดตั้ง อย่างไรก็ตาม หากเป็นเช่นนั้น ก็จะมีความเสี่ยงเพิ่มขึ้นที่จะเกิดจุดล้มเหลวเพียงจุดเดียว ซึ่งอาจทำให้การให้บริการหยุดชะงักทั่วทั้งระบบหรือสายส่ง ระบบแบบบล็อกคงที่มักใช้ตรรกะแบบกระจาย ซึ่งโดยปกติแล้วจะทนทานต่อการหยุดชะงักดังกล่าวได้มากกว่า ดังนั้น จึงจำเป็นต้องวิเคราะห์ประโยชน์และความเสี่ยงของสถาปัตยกรรม CBTC ที่กำหนด (แบบรวมศูนย์เทียบกับแบบกระจาย) อย่างรอบคอบในระหว่างการออกแบบระบบ
เมื่อนำระบบควบคุมการเดินรถด้วยคอมพิวเตอร์ (CBTC) มาใช้กับระบบที่เคยควบคุมโดยมนุษย์อย่างสมบูรณ์ โดยผู้ปฏิบัติงานทำงานโดยใช้สายตา อาจส่งผลให้ความจุลดลง (แม้ว่าความปลอดภัยจะเพิ่มขึ้นก็ตาม) เนื่องจาก CBTC ทำงานโดยมีความแม่นยำในการระบุตำแหน่งน้อยกว่าสายตาของมนุษย์ และยังมีโอกาสผิดพลาด มากกว่า เพราะมีการใช้พารามิเตอร์ของรถไฟในกรณีที่เลวร้ายที่สุดในการออกแบบ (เช่น อัตราการเบรกฉุกเฉินที่รับประกันเทียบกับอัตราการเบรกปกติ) ตัวอย่างเช่น การนำ CBTC มาใช้ในอุโมงค์รถรางใจกลางเมือง ฟิลาเดลเฟี ย ส่งผลให้เวลาในการเดินทางเพิ่มขึ้นอย่างเห็นได้ชัด และความจุลดลงเมื่อเทียบกับการขับขี่ด้วยมือโดยไม่มีการควบคุม นี่เป็นผลพวงจากการกำจัดอุบัติเหตุการชนกันของยานพาหนะ ซึ่งการขับขี่โดยใช้สายตาไม่สามารถหลีกเลี่ยงได้ และแสดงให้เห็นถึงความขัดแย้งระหว่างการปฏิบัติงานและความปลอดภัยที่เกิดขึ้นเป็นประจำ
สถาปัตยกรรม
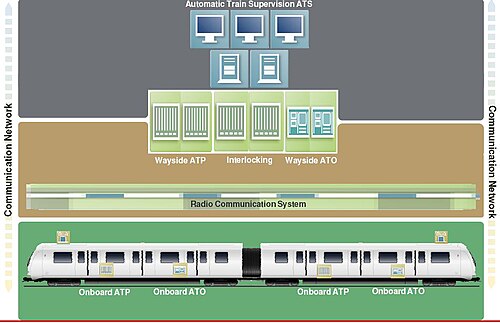

โครงสร้างสถาปัตยกรรมทั่วไปของระบบ CBTC สมัยใหม่ประกอบด้วยระบบย่อยหลักดังต่อไปนี้:
- อุปกรณ์ข้างทางซึ่งรวมถึงบาลิสระบบ ควบคุม การเดินรถและระบบย่อยที่ควบคุมแต่ละโซนในเส้นทางหรือเครือข่าย (โดยทั่วไปจะมี ฟังก์ชัน ATPและATO ข้างทาง ) ขึ้นอยู่กับผู้ผลิต สถาปัตยกรรมอาจเป็นแบบรวมศูนย์หรือแบบกระจายศูนย์ การควบคุมระบบดำเนินการจาก ระบบ ควบคุมการเดินรถอัตโนมัติ (ATS) ส่วนกลาง แม้ว่าอาจมีระบบควบคุมย่อยในพื้นที่รวมอยู่ด้วยเพื่อใช้เป็นระบบสำรอง
- อุปกรณ์ CBTC บนยานพาหนะรวมถึงระบบย่อยATPและATO
- ระบบสื่อสารระหว่างรถไฟกับจุดพักรถปัจจุบันใช้ การ เชื่อม ต่อผ่าน คลื่นวิทยุ
ดังนั้น แม้ว่าสถาปัตยกรรม CBTC จะขึ้นอยู่กับผู้ให้บริการและแนวทางทางเทคนิคของพวกเขาเสมอ แต่โดยทั่วไปแล้วอาจพบส่วนประกอบเชิงตรรกะต่อไปนี้ในสถาปัตยกรรม CBTC ทั่วไป:
- ระบบ ATP บนรถไฟระบบย่อยนี้มีหน้าที่ควบคุมความเร็วของรถไฟอย่างต่อเนื่องตามโปรไฟล์ความปลอดภัย และทำการเบรกหากจำเป็น นอกจากนี้ยังทำหน้าที่สื่อสารกับระบบ ATP ข้างทางเพื่อแลกเปลี่ยนข้อมูลที่จำเป็นสำหรับการเดินรถอย่างปลอดภัย (ส่งข้อมูลความเร็วและระยะเบรก และรับข้อมูลขีดจำกัดการเคลื่อนที่เพื่อความปลอดภัย)
- ระบบ ATO บนรถไฟมีหน้าที่ควบคุมแรงฉุดและแรงเบรกโดยอัตโนมัติ เพื่อรักษาระดับความเร็วของรถไฟให้อยู่ต่ำกว่าเกณฑ์ที่กำหนดโดยระบบย่อย ATP ภารกิจหลักของระบบนี้คือการอำนวยความสะดวกให้แก่คนขับหรือพนักงาน หรือแม้กระทั่งการเดินรถไฟในโหมดอัตโนมัติเต็มรูปแบบ ในขณะที่ยังคงรักษากฎระเบียบการจราจรและความสะดวกสบายของผู้โดยสาร นอกจากนี้ยังช่วยให้สามารถเลือกกลยุทธ์การขับขี่อัตโนมัติที่แตกต่างกันเพื่อปรับเวลาการวิ่งหรือลดการใช้พลังงานได้อีกด้วย
- ระบบ ATP ริมทางระบบย่อยนี้ทำหน้าที่จัดการการสื่อสารทั้งหมดกับรถไฟในพื้นที่ที่กำหนด นอกจากนี้ยังคำนวณขอบเขตการเคลื่อนที่ที่รถไฟทุกขบวนต้องปฏิบัติตามขณะวิ่งในพื้นที่ดังกล่าว งานนี้จึงมีความสำคัญอย่างยิ่งต่อความปลอดภัยในการเดินรถ
- ระบบ ATO ข้างทางมีหน้าที่ควบคุมจุดหมายปลายทางและเป้าหมายด้านกฎระเบียบของรถไฟทุกขบวน ฟังก์ชันการทำงานของ ATO ข้างทางจะให้ข้อมูลจุดหมายปลายทางแก่รถไฟทุกขบวนในระบบ รวมถึงข้อมูลอื่นๆ เช่นเวลาจอดที่สถานี นอกจากนี้ ยังสามารถทำงานเสริมและงานที่ไม่เกี่ยวข้องกับความปลอดภัยได้ เช่น การสื่อสารและการจัดการสัญญาณเตือน/เหตุการณ์ หรือการจัดการคำสั่งข้าม/หยุดที่สถานี
- ระบบสื่อสารระบบ CBTC ผสานรวม ระบบ วิทยุเครือข่ายดิจิทัลโดยใช้เสาอากาศหรือ สายเคเบิล แบบมีตัวป้อนสัญญาณรั่วสำหรับการสื่อสารแบบสองทิศทางระหว่างอุปกรณ์บนรางและขบวนรถไฟ โดยทั่วไปจะใช้ ย่านความถี่ 2.4 GHz ในระบบเหล่านี้ (เช่นเดียวกับWiFi ) แม้ว่า อาจใช้ ความถี่ ทางเลือกอื่น ๆ เช่น 900 MHz ( สหรัฐอเมริกา ) 5.8 GHz หรือย่านความถี่อื่น ๆ ที่ได้รับอนุญาตก็ได้เช่นกัน
- ระบบ ATSเป็นระบบที่มักถูกรวมเข้ากับโซลูชัน CBTC ส่วนใหญ่ หน้าที่หลักของระบบคือการทำหน้าที่เป็นส่วนเชื่อมต่อระหว่างผู้ปฏิบัติงานและระบบ โดยจัดการการจราจรตามเกณฑ์ข้อบังคับเฉพาะ นอกจากนี้ยังอาจมีหน้าที่อื่นๆ เช่น การจัดการเหตุการณ์และการแจ้งเตือน รวมถึงการทำหน้าที่เป็นส่วนเชื่อมต่อกับระบบภายนอก
- ระบบ ควบคุมการเดินรถ แบบเชื่อมโยง (Interlocking system ) เมื่อจำเป็นต้องใช้เป็นระบบย่อยอิสระ (เช่น ระบบสำรอง) ระบบนี้จะทำหน้าที่ควบคุมอุปกรณ์สำคัญข้างราง เช่นสวิตช์หรือสัญญาณไฟรวมถึงฟังก์ชันอื่นๆ ที่เกี่ยวข้อง ในกรณีของเครือข่ายหรือเส้นทางที่เรียบง่ายกว่า ฟังก์ชันการทำงานของระบบควบคุมการเดินรถแบบเชื่อมโยงอาจถูกรวมเข้ากับระบบ ATP ข้างรางได้
โครงการต่างๆ
เทคโนโลยี CBTC ได้รับการนำไปใช้ (และกำลังถูกนำไปใช้) อย่างประสบความสำเร็จในแอปพลิเคชันต่างๆ ดังแสดงในรูปด้านล่าง (กลางปี 2554) โดยมีตั้งแต่การใช้งานบนรางสั้น จำนวนยานพาหนะจำกัด และโหมดการทำงานไม่กี่โหมด (เช่นAPM ของสนามบิน ฮีทโธรว์หรือแกตวิก) ไปจนถึงการวางซ้อนที่ซับซ้อนบนเครือข่ายรถไฟที่มีอยู่ซึ่งขนส่งผู้โดยสารมากกว่าหนึ่งล้านคนต่อวันและมีรถไฟมากกว่า 100 ขบวน (เช่น รถไฟใต้ดิน สายจูบิลีและสายเหนือของลอนดอน , MTR สายตวนหม่า , ระบบขนส่งมวลชนด่วนคลางวัลเลย์ , สายกาจังและสายปุตราจายา ) [ 4 ]
ถึงแม้จะมีข้อจำกัดอยู่บ้าง ตารางด้านล่างนี้พยายามสรุปและอ้างอิงระบบควบคุมการจราจรทางถนนแบบใช้คลื่นวิทยุ (CBTC) หลักๆ ที่ใช้งานอยู่ทั่วโลก รวมถึงโครงการที่กำลังพัฒนาอยู่ นอกจากนี้ ตารางยังแยกความแตกต่างระหว่างการติดตั้งบนระบบที่มีอยู่และใช้งานอยู่แล้ว ( brownfield ) และการติดตั้งบนสายส่งใหม่ทั้งหมด ( greenfield )
รายการ
| ตำแหน่ง/ระบบ | เส้น | ผู้จัดหา | สารละลาย | การว่าจ้าง | กม. | จำนวนรถไฟ | ประเภทของสาขา | ระดับของระบบอัตโนมัติ | หมายเหตุ |
|---|---|---|---|---|---|---|---|---|---|
| รถไฟใต้ดินโทรอนโต | บรรทัดที่ 3 (SRT) | ธาเลส | เซลแทรค | พ.ศ. 2528 | 6.4 | 7 | กรีนฟิลด์ | ยูทีโอ | โดยมีพนักงานประจำรถไฟคอยตรวจสอบสถานะประตู และขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง |
| Réseau express métropolitain (มอนทรีออล) | เอ1-4 | อัลสตอม | อูร์บาลิส 400 [ 23 ] | 2023-2027 | 67 | 212 | กรีนฟิลด์ | ยูทีโอ | เส้นทางนี้เปิดให้บริการครั้งแรกในปี 2023 และคาดว่าจะเปิดให้บริการเต็มรูปแบบความยาว 67 กิโลเมตรในปี 2027 |
| รถไฟฟ้าสกายเทรน (แวนคูเวอร์) | สาย Expo , สาย Millennium , สาย Canada | ธาเลส | เซลแทรค | พ.ศ. 2528 | 85.4 | 176 | กรีนฟิลด์ | ยูทีโอ | |
| ดีทรอยต์ | ดีทรอยต์ พีเพิล มูฟเวอร์ | ธาเลส | เซลแทรค | พ.ศ. 2530 | 4.7 | 12 | กรีนฟิลด์ | ยูทีโอ | |
| ลอนดอน | รถไฟด็อกแลนด์ส ไลท์ เรลเวย์ | ธาเลส | เซลแทรค | พ.ศ. 2530 | 38 | 149 | กรีนฟิลด์ | ดีทีโอ | โดยมีพนักงานประจำรถไฟ (พนักงานขับรถไฟ) ที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง |
| สนามบินซานฟรานซิสโก | แอร์เทรน | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2003 | 5 | 38 | กรีนฟิลด์ | ยูทีโอ | |
| สนามบินซีแอตเติล-ทาโคมา | ระบบขนส่งดาวเทียม | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2003 | 3 | 22 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินสิงคโปร์ | สายตะวันออกเฉียงเหนือ | อัลสตอม | อูร์บาลิส 300 | 2003 | 20 | 43 | กรีนฟิลด์ | ยูทีโอ | โดยมีพนักงานประจำรถไฟ (กัปตันรถไฟ) ที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง |
| รถไฟฟ้าใต้ดินฮ่องกง | สายตวนหม่า | ธาเลส | เซลแทรค | ปี 2020 (สายทวนหม่า เฟส 1) ปี 2021 (สายทวนหม่า และสายรถไฟตะวันตกเดิม) | 57 | 65 | กรีนฟิลด์ (เฉพาะช่วงไท่หวายถึงหงฮอม) พื้นที่รกร้าง (ส่วนอื่นๆ) | สโต | ส่วนที่มีอยู่เดิมได้รับการอัปเกรดจาก SelTrac IS |
| สายดิสนีย์แลนด์รีสอร์ท | 2548 | 3 | 3 | กรีนฟิลด์ | ยูทีโอ | ||||
| ลาสเวกัส | รถไฟโมโนเรล | ธาเลส | เซลแทรค | 2004 | 6 | 36 | กรีนฟิลด์ | ยูทีโอ | |
| สนามบินดัลลัส-ฟอร์ตเวิร์ธ | สกายลิงก์ | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2548 | 10 | 64 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินโลซาน | สาย M2 | อัลสตอม | อูร์บาลิส 300 | 2008 | 6 | 18 | กรีนฟิลด์ | ยูทีโอ | |
| สนามบินลอนดอนฮีทโธรว์ | ฮีทโธรว์ เอพีเอ็ม | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2008 | 1 | 9 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินมาดริด | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2008 | 48 | 143 | บราวน์ฟิลด์ | สโต | ||
| สนามบินแมคคาร์แรน | สนามบินแมคคาร์แรน APM | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2008 | 2 | 10 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟฟ้า BTS กรุงเทพฯ | สายสีลมสายสุขุมวิท | บอมบาร์เดียร์ | ซิตี้ฟลอ 450 [ 24 ] | 2009 (หมอชิต - ออนนัท และสนามกีฬาแห่งชาติ - วงเวียนใหญ่) 2011 (เกี่ยวกับการขยายน็อต) 2558 (ส่วนขยายสำโรง) 2018 (ส่วนขยาย Kheha) 2019 (ส่วนขยายคูค็อต) | 64.26 | 98 | บราวน์ฟิลด์ (ช่วงหมอชิตถึงออนนัท และช่วงสนามกีฬาแห่งชาติถึงสะพานตากสิน) กรีนฟิลด์ (ส่วนอื่นๆ) | สโต | อัปเกรดจากระบบควบคุมการจราจรทางรถไฟ Siemens Trainguard LZB700M CTC ในปี 2009 |
| โกลด์ไลน์ | ซิตี้ฟลอ 650 | 2020 | 1.7 | 3 | กรีนฟิลด์ | ยูทีโอ | |||
| รถไฟฟ้า MRT กรุงเทพฯ | เส้นสีม่วง | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2015 | 23 | 21 | กรีนฟิลด์ | สโต | โดยมีพนักงานประจำรถไฟที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง พนักงานประจำรถไฟเหล่านี้จะเตรียมพร้อมอยู่ในขบวนรถไฟ |
| สีชมพู , สีเหลือง | 2021 | 62.52 | 58 | ยูทีโอ | |||||
| รถไฟใต้ดินบาร์เซโลนา | ซีเมนส์ | เทรนการ์ด MT CBTC | 2009 (บรรทัดที่ 9, บรรทัดที่ 11) 2010 (บรรทัดที่ 10) | 46 | 50 | กรีนฟิลด์ | ยูทีโอ | ||
| รถไฟใต้ดินนครนิวยอร์ก | สาย BMT Canarsie , สาย IRT Flushing | ซีเมนส์ | เทรนการ์ด MT CBTC | 2009 | 17 | 69 [หมายเหตุ 1 ] | บราวน์ฟิลด์ | สโต | |
| รถไฟฟ้าใต้ดินสิงคโปร์ | เส้นวงกลม | อัลสตอม | อูร์บาลิส 300 | 2009 | 35 | 64 | กรีนฟิลด์ | ยูทีโอ | โดยมีพนักงานประจำรถไฟ (โรเวอร์) ที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง พนักงานประจำรถไฟเหล่านี้ยังพร้อมปฏิบัติหน้าที่ระหว่างสถานีสวนพฤกษศาสตร์และสถานี คา ลเดคอตต์ ด้วย |
| รถไฟใต้ดินไทเป | เน่ยหู-มูชา | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2009 | 26 | 76 | กรีนฟิลด์และบราวน์ฟิลด์ | ยูทีโอ | |
| สนามบินวอชิงตัน-ดัลเลส | ดัลเลส เอพีเอ็ม | ธาเลส | เซลแทรค | 2009 | 8 | 29 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินเซาเปาโล | 1 , 2 , 3 | อัลสตอม | อูร์บาลิส | 2010 | 62 | 142 | กรีนฟิลด์และบราวน์ฟิลด์ | ยูทีโอ | ปัจจุบัน CBTC ใช้งานอยู่ในสาย 1 และ 2 และกำลังติดตั้งในสาย 3 |
| 4 | ซีเมนส์ | เทรนการ์ด MT CBTC | 13 | 29 | กรีนฟิลด์ | สายส่ง UTO แห่งแรกในละตินอเมริกา | |||
| รถไฟใต้ดินลอนดอน | สายจูบิลี | ธาเลส | เซลแทรค | 2010 | 37 | 63 | บราวน์ฟิลด์ | สโต | |
| สนามบินลอนดอนแกตวิก | รถรับส่ง APM | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2010 | 1 | 6 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินมิลาน | 1 | อัลสตอม | อูร์บาลิส | 2010 | 27 | 68 | บราวน์ฟิลด์ | สโต | |
| ฟิลาเดลเฟีย SEPTA | รถไฟใต้ดิน SEPTA และรถรางบนพื้นดิน | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2010 | 8 | 115 | สโต | ||
| บีแอนด์จี เมโทร | รถไฟฟ้ารางเบาปูซาน-กิมแฮ | ธาเลส | เซลแทรค | 2011 | 23.5 | 25 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินดูไบ | สีแดงสีเขียว | ธาเลส | เซลแทรค | 2011 | 70 | 85 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินมาดริด | อินเวนซิส | ซิริอุส | 2011 | 9 | ? | บราวน์ฟิลด์ | สโต | ||
| รถไฟใต้ดินปารีส | 1 | ซีเมนส์ | เทรนการ์ด MT CBTC | 2011 | 16 | 53 | บราวน์ฟิลด์ | ดีทีโอ | |
| สนามบินนานาชาติแซคราเมนโต | เอพีเอ็มแซคราเมนโต | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2011 | 1 | 2 | กรีนฟิลด์ | ยูทีโอ | |
| ยงอิน | เอเวอร์ไลน์ | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2011 | 19 | 30 | ยูทีโอ | ||
| รถไฟใต้ดินแอลเจียร์ | 1 | ซีเมนส์ | เทรนการ์ด MT CBTC | 2012 | 9 | 14 | กรีนฟิลด์ | สโต | |
| รถไฟใต้ดินอิสตันบูล | เอ็ม4 | ธาเลส | เซลแทรค | 2012 | 21.7 | กรีนฟิลด์ | |||
| เอ็ม5 | บอมบาร์เดียร์ | ซิตี้เอฟโล 650 | 2017-2018 | 16.9 | 21 | กรีนฟิลด์ | ยูทีโอ | เปิดให้บริการ 2 เฟส เฟสแรกในปี 2017 และเฟสที่สองในปี 2018 | |
| รถไฟใต้ดินอังการา | เอ็ม1 | อันซัลโด เอสทีเอส | ซีบีทีซี | 2018 | 14.6 | บราวน์ฟิลด์ | สโต | ||
| เอ็ม2 | อันซัลโด เอสทีเอส | ซีบีทีซี | 2014 | 16.5 | กรีนฟิลด์ | สโต | |||
| เอ็ม3 | อันซัลโด เอสทีเอส | ซีบีทีซี | 2014 | 15.5 | กรีนฟิลด์ | สโต | |||
| เอ็ม4 | อันซัลโด เอสทีเอส | ซีบีทีซี | 2017 | 9.2 | กรีนฟิลด์ | สโต | |||
| รถไฟใต้ดินเม็กซิโกซิตี้ | อัลสตอม | อูร์บาลิส | 2012 | 25 | 30 | กรีนฟิลด์ | สโต | ||
ซีเมนส์ | เทรนการ์ด MT CBTC | 2022-2024 | 18 | 39 | บราวน์ฟิลด์ | ดีทีโอ | |||
| รถไฟใต้ดินนครนิวยอร์ก | สาย IND Culver | ธาเลสและซีเมนส์ | หลากหลาย | 2012 | กรีนฟิลด์ | รางทดสอบได้รับการปรับปรุงใหม่ในปี 2012 ส่วนรางอื่นๆ ของสายนี้จะได้รับการปรับปรุงใหม่ภายในต้นทศวรรษ 2020 | |||
| สนามบินฟีนิกซ์สกายฮาร์เบอร์ | รถไฟลอยฟ้า PHX | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2012 | 3 | 18 | กรีนฟิลด์ | ยูทีโอ | |
| ริยาด | โมโนเรล KAFD | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2012 | 4 | 12 | กรีนฟิลด์ | ยูทีโอ | |
| สายรถไฟชานเมืองเซาเปาโล | 8 , 10 , 11 | อินเวนซิส | ซิริอุส | 2012 | 107 | 136 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินการากัส | 1 | อินเวนซิส | ซิริอุส | 2013 | 21 | 48 | บราวน์ฟิลด์ | ||
| รถไฟใต้ดินมาลากา | อัลสตอม | อูร์บาลิส | 2013 | 17 | 15 | กรีนฟิลด์ | เอทีโอ | ||
| รถไฟใต้ดินปารีส | 3 , 5 | อันซัลโด เอสทีเอส / ซีเมนส์ | ภายในโครงการ Ouragan ของ RATP | 2010, 2013 | 26 | 40 | บราวน์ฟิลด์ | สโต | |
| 13 | ธาเลส | เซลแทรค | 23 | 66 | |||||
| รถไฟใต้ดินโทรอนโต | 1 | อัลสตอม | อูร์บาลิส 400 | ปี 2017 ถึง 2022 | 76.78 [ 6 ] | 65 [ 6 ] | บราวน์ฟิลด์(จากฟินช์ถึงเชปปาร์ดเวสต์)กรีนฟิลด์(จากเชปปาร์ดเวสต์ถึงวอห์น) | สโต | CBTC เปิดใช้งานระหว่าง สถานี Vaughan Metropolitan CentreและEglintonณ เดือนตุลาคม 2021 [ 25 ]เส้นทางทั้งหมดมีกำหนดการปรับปรุงให้เสร็จสมบูรณ์ภายในปี 2022 [ 26 ] [ 7 ] |
| รถไฟฟ้าใต้ดินสิงคโปร์ | สายดาวน์ทาวน์ | อินเวนซิส | ซิริอุส | 2013 | 42 | 92 | กรีนฟิลด์ | ยูทีโอ | โดยมีพนักงานประจำรถไฟคอยขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง |
| รถไฟใต้ดินบูดาเปสต์ | เอ็ม2 , เอ็ม4 | ซีเมนส์ | เทรนการ์ด MT CBTC | 2013 (M2) 2014 (M4) | 17 | 41 | สาย M2: STO สาย M4: ยูทีโอ | ||
| รถไฟฟ้าใต้ดินดูไบ | รถไฟฟ้า LRT อัลซูฟูห์ | อัลสตอม | อูร์บาลิส | 2014 | 10 | 11 | กรีนฟิลด์ | สโต | |
| รถไฟฟ้ารางเบาเอดมันตัน | สายแคปิตอลสายเมโทร | ธาเลส | เซลแทรค | 2014 | 24 รางคู่ | 94 | บราวน์ฟิลด์ | ดีทีโอ | |
| รถไฟใต้ดินเฮลซิงกิ | 1 | ซีเมนส์ | เทรนการ์ด MT CBTC | 2014 | 35 | 45.5 | กรีนฟิลด์และบราวน์ฟิลด์ | STO [ 27 ] | |
| สนามบินนานาชาติฮ่องกง | ระบบขนส่งผู้โดยสารอัตโนมัติของสนามบินนานาชาติฮ่องกง | ธาเลส | เซลแทรค | 2014 | 4 | 14 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินอินชอน | 2 | ธาเลส | เซลแทรค | 2014 | 29 | 37 | กรีนฟิลด์ | ยูทีโอ | |
| สนามบินเจดดาห์ | กษัตริย์อับดุลอาซิซ เอพีเอ็ม | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2014 | 2 | 6 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินลอนดอน | สายเหนือ | ธาเลส | เซลแทรค | 2014 | 58 | 106 | บราวน์ฟิลด์ | สโต | |
| รถไฟฟ้าใต้ดินซัลวาดอร์ | 4 | ธาเลส[ 3 ] | เซลแทรค | 2014 | 33 | 29 | กรีนฟิลด์ | ดีทีโอ | |
| องค์การขนส่งอ่าวแมสซาชูเซตส์ | แมททาแพน ไลน์ | อาร์เจเนีย | เซฟเน็ต ซีบีทีซี | 2014 | 6 | 12 | กรีนฟิลด์ | สโต | |
| สนามบินมิวนิก | สนามบินมิวนิก อาคารผู้โดยสาร T2 APM | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2014 | 1 | 12 | กรีนฟิลด์ | ยูทีโอ | |
| สายชินบุนดัง | เส้น Dx | ธาเลส | เซลแทรค | 2014 | 30.5 | 12 | กรีนฟิลด์ | ยูทีโอ | |
| ปานามาเมโทร | 1 | อัลสตอม | อูร์บาลิส | 2014 | 13.7 | 17 | กรีนฟิลด์ | เอทีโอ | |
| รถไฟใต้ดินเซาเปาโล | 15 | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2014 | 14 | 27 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินอัมสเตอร์ดัม | 50 , 51 , 52 , 53 , 54 | อัลสตอม | อูร์บาลิส | 2015 | 62 | 85 | กรีนฟิลด์และบราวน์ฟิลด์ | สโต | |
| รถไฟฟ้าใต้ดินเดลี | บรรทัดที่ 7 บรรทัดที่ 9 | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | ปี 2018 (พนักงานขับรถชั่วคราว) ปี 2021 (ดำเนินการ ATO เต็มรูปแบบ) ปี 2024 (เปลี่ยนไปใช้ UTO) | 55 | ||||
| รถไฟใต้ดินเซาเปาโล | 5 | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2015 | 20 | 34 | บราวน์ฟิลด์และกรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินบัวโนสไอเรส | ซีเมนส์ | เทรนการ์ด MT CBTC | 2016 | 8 | 20 | ? | ? | ||
4.5 | 18 | ||||||||
| รถไฟฟ้าใต้ดินฮ่องกง | สายเกาะใต้ | อัลสตอม | อูร์บาลิส 400 | 2016 | 7 | 10 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินไฮเดอราบัด | L1, L2, L3 | ธาเลส | เซลแทรค | 2016 | 72 | 57 | กรีนฟิลด์ | สโต | |
| รถไฟฟ้าโคจิ | แอล1 | อัลสตอม | อูร์บาลิส 400 | 2016 | 26 | 25 | กรีนฟิลด์ | เอทีโอ | |
| รถไฟใต้ดินนครนิวยอร์ก | ท่อส่งน้ำล้าง IRT | ธาเลส | เซลแทรค | 2016 | 17 | 46 [หมายเหตุ 2 ] | บราวน์ฟิลด์และกรีนฟิลด์ | สโต | |
| รถไฟสาย IND Queens Boulevard | ซีเมนส์/ธาลส์ | เทรนการ์ด MT CBTC | 2017–2022 [หมายเหตุ 3 ] | 21.9 [หมายเหตุ 4 ] | 309 [หมายเหตุ 5 ] | บราวน์ฟิลด์ | เอทีโอ | จะมีพนักงานควบคุมรถไฟประจำอยู่บนขบวนรถไฟ เนื่องจากเส้นทางส่วนอื่นๆ ของสายควีนส์บูเลอวาร์ดไลน์ยังไม่ได้ติดตั้งระบบ CBTC | |
| รถไฟฟ้าใต้ดินกัวลาลัมเปอร์ (LRT) | สาย 5 สายเกลานาจายา | ธาเลส | เซลแทรค | 2016 | 91.5 | 126 | บราวน์ฟิลด์ | ยูทีโอ | |
| เมโทร ซานติอาโก | อัลสตอม | อูร์บาลิส | 2016 | 20 | 42 | กรีนฟิลด์และบราวน์ฟิลด์ | ดีทีโอ | ||
| วอลต์ดิสนีย์เวิลด์ | ระบบรถไฟโมโนเรลของวอลต์ดิสนีย์เวิลด์ | ธาเลส | เซลแทรค | 2016 | 22 | 15 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินเดลี | สาย 8 | นิปปอน ซิกแนล | สปาร์คส์ | ปี 2017 (พนักงานขับรถชั่วคราว) ปี 2021 (การดำเนินงาน ATO เต็มรูปแบบ) | กรีนฟิลด์ | ยูทีโอ | |||
| รถไฟใต้ดินลีลล์ | 1 | อัลสตอม | อูร์บาลิส | 2017 | 15 | 27 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินลัคเนา | แอล1 | อัลสตอม | อูร์บาลิส | 2017 | 23 | 20 | กรีนฟิลด์ | เอทีโอ | |
| เมโทร ซานติอาโก | ธาเลส | เซลแทรค | 2017 | 15.4 | 15 | กรีนฟิลด์ | ยูทีโอ | ||
| รถไฟใต้ดินสตอกโฮล์ม | เส้นสีแดง | อันซัลโด เอสทีเอส | ซีบีทีซี | 2017 | 41 | 30 | บราวน์ฟิลด์ | สโต->ยูโต | |
| รถไฟฟ้าใต้ดินสิงคโปร์ | สายเหนือ-ใต้ | ธาเลส | เซลแทรค | 2017 | 45.3 | 198 | บราวน์ฟิลด์ | ยูโต[ 28 ] | โดยมีพนักงานประจำรถไฟ (กัปตันรถไฟ) ที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง พนักงานประจำรถไฟเหล่านี้จะอยู่ในสถานะเตรียมพร้อมบนรถไฟ |
| สายตะวันออก-ตะวันตก | 2018 | 57.2 | 198 | บราวน์ฟิลด์ (เส้นทางเดิม) กรีนฟิลด์(เฉพาะส่วนต่อขยายทูอัสเวสต์) | โดยมีพนักงานประจำรถไฟที่ทำหน้าที่ขับรถไฟในกรณีที่เกิดเหตุการณ์ขัดข้อง พนักงานประจำรถไฟเหล่านี้จะเตรียมพร้อมอยู่ในขบวนรถไฟ | ||||
| รถไฟ S-Train โคเปนเฮเกน | ทุกสาย | ซีเมนส์ | เทรนการ์ด MT CBTC | 2021 | 170 | 136 | บราวน์ฟิลด์ | สโต | |
| รถไฟฟ้าใต้ดินโดฮา | แอล1 | ธาเลส | เซลแทรค | 2018 | 33 | 35 | กรีนฟิลด์ | เอทีโอ | |
| รถไฟใต้ดินนครนิวยอร์ก | สาย IND Eighth Avenue | ซีเมนส์/ธาลส์ | เทรนการ์ด MT CBTC | 2018–2024 [หมายเหตุ 6 ] | 9.3 | บราวน์ฟิลด์ | เอทีโอ | จะมีพนักงานควบคุมรถไฟประจำอยู่บนขบวนรถ เนื่องจากเส้นทางส่วนอื่นๆ ของสาย Eighth Avenue Line ยังไม่ได้ติดตั้งระบบ CBTC | |
| โอ-เทรน | ธาเลส | เซลแทรค | 2018 | 12.5 | 34 | กรีนฟิลด์ | สโต | ||
| การท่าเรือทรานส์ฮัดสัน (PATH) | ทุกสาย | ซีเมนส์ | เทรนการ์ด MT CBTC | 2018 | 22.2 | 50 | บราวน์ฟิลด์ | เอทีโอ | |
| แรนส์ อาร์ต | บี | ซีเมนส์ | เทรนการ์ด MT CBTC | 2018 | 12 | 19 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินริยาด | L4, L5 และ L6 | อัลสตอม | อูร์บาลิส | 2018 | 64 | 69 | กรีนฟิลด์ | เอทีโอ | |
| บริษัท โซซาวอนซี ( จังหวัดคยองกี ) | ซอแฮไลน์ | ซีเมนส์ | เทรนการ์ด MT CBTC | 2018 | 23.3 | 7 | กรีนฟิลด์ | เอทีโอ | |
| รถไฟใต้ดินบัวโนสไอเรส | ยังไม่กำหนด | ยังไม่กำหนด | 2019 | 11 | 26 | ยังไม่กำหนด | ยังไม่กำหนด | ||
| กิมโป | กิมโป โกลด์ไลน์ | นิปปอน ซิกแนล | สปาร์คส์ | 2019 | 23.63 | 23 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟฟ้า MRT จาการ์ตา | เส้นเหนือ-ใต้ | นิปปอน ซิกแนล | สปาร์คส์ | 2019 | 20.1 | 16 | กรีนฟิลด์ | สโต | |
| ปานามาเมโทร | 2 | อัลสตอม | อูร์บาลิส | 2019 | 21 | 21 | กรีนฟิลด์ | เอทีโอ | |
| เมโทร ซานติอาโก | ธาเลส | เซลแทรค | 2019 | 21.7 | 22 | กรีนฟิลด์ | ยูทีโอ | ||
| ซิดนีย์เมโทร | รถไฟฟ้าสายตะวันตกเฉียงเหนือและสายแบงส์ทาวน์ | อัลสตอม | อูร์บาลิส 400 | 2019 | 37 | 22 | บราวน์ฟิลด์ | ยูทีโอ | |
| รถไฟฟ้าใต้ดินสิงคโปร์ | สายทอมสัน-อีสต์โคสต์ | อัลสตอม | อูร์บาลิส 400 | 2020 | 43 | 91 | กรีนฟิลด์ | ยูทีโอ | |
| สนามบินสุวรรณภูมิ เอพีเอ็ม | MNTB ถึง SAT-1 | ซีเมนส์ | เทรนการ์ด MT CBTC | 2020 | 1 | 6 | กรีนฟิลด์ | ยูทีโอ | |
| รถไฟใต้ดินบูคาเรสต์ | สาย M5 | อัลสตอม | อูร์บาลิส 400 | 2020 | 6.9 | 13 | สโต | จะพร้อมให้บริการอย่างเต็มรูปแบบหลังจากส่งมอบรถไฟ Alstom Metropolis BM4 จำนวน 13 ขบวนแล้ว | |
| ระบบขนส่งมวลชนด่วนบริเวณอ่าว | เส้นสีแดงเส้นสีส้ม เส้นสีเหลืองเส้นสีเขียวเส้นสีน้ำเงิน | ฮิตาชิ เรล เอสทีเอส | ซีบีทีซี | 2030 | 211.5 | บราวน์ฟิลด์ | สโต | ||
| ลาฮอร์ | สายสีส้ม | อัลสตอม-คาสโก้ | อูราบลิส888 | 2020 | 27 | 27 (ซีอาร์อาร์ซี) | กรีนฟิลด์ | เอทีโอ | |
| รถไฟฟ้าใต้ดินฮ่องกง | สายรถไฟตะวันออก | ซีเมนส์ | เทรนการ์ด MT CBTC | 2021 | 41.5 | 37 | บราวน์ฟิลด์ | สโต | |
| รถไฟใต้ดินลิสบอน | เส้นสีน้ำเงินเส้นสีเหลืองเส้นสีเขียว[ 29 ] | ซีเมนส์ | เทรนการ์ด MT CBTC | 2021-2027 | 33.7 | 84 | บราวน์ฟิลด์ | สโต | |
| บริษัท บาเซิลแลนด์ ทรานสปอร์ต (BLT) | สาย 19 วอลเดนเบอร์เกอร์บาห์น | สแตดเลอร์ | โนวา โปร ซีบีทีซี | 2022 | 13.2 | 10 | กรีนฟิลด์ | สโต | |
| รถไฟใต้ดินเซาเปาโล | 17 | ธาเลส | เซลแทรค | 2022 | 17.7 | 24 | กรีนฟิลด์ | ยูทีโอ | กำลังก่อสร้าง |
| เมลเบิร์น | สายแครนบอร์น , สายพาเคแนม , สายซันบิวรี , อุโมงค์รถไฟใต้ดิน | บอมบาร์เดียร์ | ซิตี้ฟลอ 650 | 2023 | 115.8 | 70 | บราวน์ฟิลด์ | สโต | บริการ CBTC มีให้บริการเฉพาะระหว่างสถานี West FootscrayและClayton เท่านั้น |
| รถไฟใต้ดินเซาเปาโล | บรรทัดที่ 6 | นิปปอน ซิกแนล | สปาร์คส์ | 2023 | 15 | 24 | กรีนฟิลด์ | ยูทีโอ | กำลังก่อสร้าง |
| โตเกียว | โตเกียวเมโทรสายมารุโนะอุจิ[ 30 ] | มิตซูบิชิ | ? | 2023 | 27.4 | 53 | บราวน์ฟิลด์ | ? | |
| รถไฟใต้ดินโตเกียวสายฮิบิยะ | ? | ? | 20.3 | 42 | ? | ||||
| โซล | ซิลลิม ไลน์ | แอลทราน-ซีเอ็กซ์ | 2023 | 7.8 | ? | ? | ? | ||
| เจ.อาร์.เวสต์ | สายวาคายามะ | ? | ? | 2023 | 42.5 | ? | บราวน์ฟิลด์ | ? | |
| รถไฟฟ้าใต้ดินกัวลาลัมเปอร์ (LRT) | สาย 11 สายชาห์อาลัม | ธาเลส | เซลแทรค | 2024 | 36 | 25 | บราวน์ฟิลด์ | ยูทีโอ | |
| มาร์มาเรย์ไลน์ส | สายรถไฟชานเมือง | อินเวนซิส | ซิริอุส | ? | 77 | ? | กรีนฟิลด์ | สโต | |
| รถไฟฟ้าใต้ดินฮ่องกง | สายกวุนตง , สายซวนวาน , สายเกาะ , สายเจิงกวานโอ | บริษัท อัลสตอม-ฮิตาชิ เรล (เดิมชื่อ บริษัท เธลส์) | เซลแทร็กขั้นสูง | 2026-2029 | 58.1 | 128 | บราวน์ฟิลด์ | สโตและดีโต | |
| รถไฟใต้ดินนครนิวยอร์ก | สาย IND Crosstown [ 31 ] | บริษัทฮิตาชิ เรล (เดิมชื่อบริษัทธาเลส) | เซลแทรค | 2029 | 16 | 309 [หมายเหตุ 5 ] | บราวน์ฟิลด์ | สโต | |
| รถไฟใต้ดินปอร์โต | อัลสตอม | ซิตี้ฟลอ 250 | 2024 | 3.0 | 18 | กรีนฟิลด์ | สโต | ||
| อาห์เมดาบัด | เมกะ | นิปปอน ซิกแนล | สปาร์คส์ | ? | 39.259 | ตู้โดยสาร 96 ตู้ (ขบวนรถ) | ? | ? | |
| บัลติมอร์ | สถานีรถไฟใต้ดิน Baltimore Metro SubwayLink | ฮิตาชิ เรล เอสทีเอส | ซีบีทีซี | 2025 | 24.8 | บราวน์ฟิลด์ | สโต | รถไฟและระบบสัญญาณใหม่กำลังอยู่ระหว่างการทดสอบ คาดว่าจะเริ่มให้บริการในช่วงกลางปี 2025 [ 33 ] | |
| การขนส่งสำหรับลอนดอน | สายเอลิซาเบธ | ซีเมนส์ | เทรนการ์ด MT CBTC | 2022 | 42 | 70 | บราวน์ฟิลด์ | สโต | สถานีแพดดิงตัน ไปยัง แอ็บบีย์วูด / สแตรตฟอร์ด |
| รถไฟฟ้า LRT จาโบเดเบค | สายเบกาซีสายซีบูบูร์ | ซีเมนส์ | Trainguard MT CBTC [ 34 ] | 2023 | 44.4 | 31 | กรีนฟิลด์ | ดีทีโอ | |
| รถไฟใต้ดินออสโล | ทุกสาย | ซีเมนส์ | เทรนการ์ด MT CBTC | 2025-2030 | 85 | 115 | กรีนฟิลด์ ( สายฟอร์เนบู ) บราวน์ฟิลด์ (สายอื่นๆ) | สโต | ทยอยนำมาใช้ทั่วทั้งระบบ โดยเริ่มใช้งานครั้งแรกระหว่างBrattlikollenและ Lambertseter บนสาย Lambertseter [ 35 ] [ 36 ] |
| แอตแลนตา มาร์ธา | ทุกสาย | สแตดเลอร์ | โนวา โปร ซีบีทีซี | 2024 | 77 | 354 | บราวน์ฟิลด์ | สโต | |
| สนามบินนานาชาติฮาร์ทส์ฟิลด์-แจ็กสัน แอตแลนตา | เครื่องบินและรถไฟ | อัลสตอม | ? | 2024 | 4.5 | 63 | บราวน์ฟิลด์ | ยูทีโอ |
หมายเหตุและเอกสารอ้างอิง
หมายเหตุ
- ^นี่คือจำนวนขบวนรถไฟสี่ตู้ที่มีให้บริการ สาย BMT Canarsie ใช้รถไฟแปดตู้
- ^นี่คือจำนวนขบวนรถไฟ 11 โบกี้ที่มีให้บริการ รถไฟสาย IRT Flushing Line มีทั้งหมด 11 โบกี้ แต่ไม่ได้เชื่อมต่อกันทั้งหมด โดยจะจัดเรียงเป็นชุดละ 5 และ 6 โบกี้
- ^งานก่อสร้างดำเนินการเป็นระยะ โดยระยะหลักระหว่างสถานี50th Streetและเสร็จสมบูรณ์ในปี 2022
- ^ รวมถึง "ทางเลี่ยงด่วน" ระยะทาง 1.48 กม. ซึ่ง รถไฟด่วนที่ไม่หยุดจอดจะใช้เส้นทางที่แตกต่างจากรถไฟท้องถิ่นที่หยุดจอดทุกสถานี
- นี่คือจำนวนขบวนรถไฟสี่และห้าตู้ที่จะติดตั้งระบบ CBTC โดยจะเชื่อมต่อกันเป็นชุดละ 8 หรือ 10 ตู้ เส้นทางที่ใช้สาย Queens Boulevard และ Crosstown จะให้บริการโดยรถไฟจากJamaica Yard และ East New York Yard
- ^งานก่อสร้างจะดำเนินการเป็นระยะ โดยระยะแรกอยู่ระหว่าง สถานี 59thและสถานี High Street
- ^จำนวนตู้รถไฟทั้งหมดที่สั่งซื้อ โดยปกติแล้วการให้บริการจะใช้ขบวนรถไฟสี่ตู้
เอกสารอ้างอิง
- ^ a b c d e 1474.1–1999 – มาตรฐาน IEEE สำหรับการควบคุมรถไฟโดยใช้การสื่อสาร (CBTC) ข้อกำหนดด้านประสิทธิภาพและฟังก์ชันการทำงาน[1] (เข้าถึงเมื่อวันที่ 14 มกราคม 2019)
- ^ Wu, Qing; Ge, Xiahau; Cole, Colin; Spiryagin, Maksym; Bernal Arango, Esteban (2023-01-01). การควบคุมรถไฟโดยใช้การสื่อสาร (CBTC): ตัวควบคุมรถไฟและพลวัต . มหาวิทยาลัย CQ. ISBN 978-1-925627-79-4.
- ^ a b "บริษัท Thales ได้รับสัญญาด้านระบบสัญญาณสำหรับรถไฟฟ้าใต้ดินสายใหม่ในเมืองซัลวาดอร์" . กลุ่มบริษัท Thales. 2014-03-24 . สืบค้นเมื่อ2019-05-09 .
- ^ a b Bombardier จะส่งมอบระบบสัญญาณรถไฟใต้ดินลอนดอนที่สำคัญ[2]ข่าวประชาสัมพันธ์ ศูนย์สื่อสารมวลชน Bombardier Transportation, 2011 เข้าถึง มิถุนายน 2011
- ^ a b CITYFLO 650 รถไฟใต้ดินมาดริด การแก้ปัญหาความท้าทายด้านความจุ[3] เก็บถาวรเมื่อ 2012-03-30 ที่Wayback Machine Bombardier Transportation Rail Control Solutions, 2010 เข้าถึงเมื่อมิถุนายน 2011
- ^ a b c "สรุปบริการ" (PDF) . คณะกรรมการขนส่งมวลชนโทรอนโต .
- ^ a b "การปรับปรุงระบบสัญญาณให้ทันสมัย: การปิดให้บริการรถไฟใต้ดินในปี 2017"คณะกรรมการขนส่งโทรอนโต 18 มกราคม 2017 สืบค้นเมื่อ23 มกราคม 2017
[ตำแหน่งวิดีโอ 1:56] รถไฟจะสามารถให้บริการได้บ่อยขึ้นถึงทุกๆ 1 นาที 55 วินาที แทนที่จะเป็น 2 นาทีครึ่งตามที่กำหนดไว้ในปัจจุบัน [2:19] เมื่อการติดตั้งเสร็จสมบูรณ์ตลอดทั้งสายในปี 2019 จะทำให้สามารถรองรับผู้โดยสารได้เพิ่มขึ้นถึง 25% [2:33] ระบบควบคุมการจราจรทางอากาศอัตโนมัติ (ATC) จะเริ่มใช้งานในสาย 1 ทั้งหมดเป็นระยะๆ ภายในสิ้นปี 2019 โดยเริ่มจากส่วนของสาย 1 ระหว่างสถานี Spadina และ Wilson และส่วนต่อขยายสาย 1 ไปยัง
York Region
ที่จะเปิดให้บริการในปลายปีนี้
- ^ Zhu, Li (5 พฤศจิกายน 2015). "1.2 วิวัฒนาการของระบบส่งสัญญาณ/ควบคุมรถไฟ". ใน Yu, F. Richard (บรรณาธิการ). ความก้าวหน้าในระบบควบคุมรถไฟแบบใช้การสื่อสาร . สำนักพิมพ์ CRC. ISBN 978-1-351-23170-1สืบค้นข้อมูลเมื่อ 1 มิถุนายน 2569
- ^วิทยุดิจิทัลมีศักยภาพสูงสำหรับรถไฟ [4] Bruno Gillaumin, International Railway Journal, พฤษภาคม 2001 สืบค้นโดย findarticles.com ในเดือนมิถุนายน 2011
- ^ "บอมบาร์เดียร์ฉลองครบรอบ 15 ปี ระบบควบคุมรถไฟ ไร้คนขับแบบไร้สายระบบแรกของโลก" (ข่าวประชาสัมพันธ์) บอมบาร์เดียร์ ทรานสปอร์ตเทชั่น MarketWired 29 มีนาคม 2018 เก็บถาวรจากต้นฉบับเมื่อ 22 มกราคม 2019 สืบค้นเมื่อ22 มกราคม 2019
- ^โครงการ CBTC [5] เก็บถาวรเมื่อ 2015-06-14 ที่ Wayback Machine www.tsd.org/cbtc/projects, 2005 เข้าถึงเมื่อมิถุนายน 2011
- ^ a bวิทยุ CBTC: จะทำอย่างไร? จะไปทางไหน? [6] เก็บถาวรเมื่อ 2011-07-28 ที่Wayback Machine Tom Sullivan, 2005. www.tsd.org. เข้าถึงเมื่อพฤษภาคม 2011
- ^ a b Subset-023. "ERTMS/ETCS-Glossary of Terms and Abbreviations" . ERTMS USERS GROUP. 2014. เก็บถาวรจากต้นฉบับเมื่อ 2018-12-21 . เรียกดูเมื่อ2018-12-21 .
- ^ IEC 62290-1 การใช้งานทางรถไฟ – การจัดการการขนส่งในเมืองและระบบควบคุม/สั่งการ – ส่วนที่ 1: หลักการของระบบและแนวคิดพื้นฐาน [7] IEC, 2006 เข้าถึงเมื่อเดือนกุมภาพันธ์ 2014
- ^การปฏิวัติเงียบของมาดริด [8]ใน International Railway Journal, Keith Barrow, 2010 เข้าถึงผ่าน goliath.ecnext.com ในเดือนมิถุนายน 2011
- ^ a bการเดินรถไฟแบบกึ่งอัตโนมัติ ไร้คนขับ และไม่ต้องมีผู้ดูแล[9] เก็บถาวรเมื่อวันที่ 19 พฤศจิกายน 2010 ที่Wayback Machine IRSE-ITC, 2010 เข้าถึงผ่าน www.irse-itc.net ในเดือนมิถุนายน 2011
- ↑ CBTC: มีความเป็นไปได้สูง. (10) Comunidad de Madrid, www.madrig.org, 2010 เข้าถึงเมื่อเดือนมิถุนายน 2554
- ^ CBTC สามารถเพิ่มขีดความสามารถได้อย่างไร – การควบคุมรถไฟโดยใช้การสื่อสาร [11] William J. Moore, Railway Age, 2001 เข้าถึงผ่าน findarticles.com ในเดือนมิถุนายน 2011
- ^ ETRMS ระดับ 3 ความเสี่ยงและผลประโยชน์ต่อทางรถไฟของสหราชอาณาจักร หน้า 19 [12]ห้องปฏิบัติการวิจัยการขนส่ง เข้าถึงเมื่อธันวาคม 2011
- ^ ETRMS ระดับ 3 ความเสี่ยงและผลประโยชน์ต่อทางรถไฟของสหราชอาณาจักร ตารางที่ 5 [13]ห้องปฏิบัติการวิจัยการขนส่ง เข้าถึงเมื่อธันวาคม 2011
- ^ ETRMS ระดับ 3 ความเสี่ยงและผลประโยชน์ต่อทางรถไฟของสหราชอาณาจักร หน้า 18 [14]ห้องปฏิบัติการวิจัยการขนส่ง เข้าถึงเมื่อธันวาคม 2011
- ^ a bการนำเสนอการประชุมระดับโลกของ CBTC, สตอกโฮล์ม, พฤศจิกายน 2011 [15] Global Transport Forum เข้าถึงเมื่อธันวาคม 2011
- ^ 16 พฤศจิกายน 2020; ทีมงาน • METRO. "มอนทรีออลเปิดตัวรถไฟ Alstom REM คันแรก" . www.metro-magazine.com . สืบค้นเมื่อ12 มกราคม 2026 .
{{cite web}}: CS1 maint: numeric names: authors list ( link ) - ^ "ระบบส่งสัญญาณขนส่งมวลชน" . 2022-01-01. เก็บถาวรจากต้นฉบับเมื่อ 1 มกราคม 2022 . เรียกดูเมื่อ2024-11-26 .
- ^สจวร์ต กรีน [@TTCStuart] (2021-10-02). "การปิดให้บริการรถไฟใต้ดิน #TTC ตามกำหนดการในสุดสัปดาห์นี้ได้สิ้นสุดลงแล้ว และได้กลับมาให้บริการเต็มรูปแบบอีกครั้ง ทีมงานได้ดำเนินการในส่วนนี้ของระบบสัญญาณควบคุมรถไฟอัตโนมัติแบบใหม่บนสาย 1 เสร็จสิ้นแล้ว ขณะนี้ ATC กำลังให้บริการจาก Vaughan MC ไปยัง Eglinton" ( ทวีต ) – ผ่านทางทวิตเตอร์
- ^ Fox, Chris (2019-04-05). "ระบบสัญญาณใหม่ล่าช้ากว่ากำหนด 3 ปี และใช้งบประมาณเกินไป 98 ล้านดอลลาร์: รายงาน" . CP24 . สืบค้นเมื่อ2019-04-10 .
- ^แผนการพัฒนาระบบรถไฟฟ้าใต้ดินเฮลซิงกิแบบอัตโนมัติถูกลดขนาดลงข่าวสารเกี่ยวกับรถไฟในเมืองวารสารรถไฟนานาชาติปี 2012
- ^เฉิง, เคนเนธ (12 เมษายน 2560). "การทดสอบระบบสัญญาณตลอดทั้งวันบนสายเหนือ-ใต้จะเริ่มในวันอาทิตย์" . TODAY Online . สืบค้นเมื่อ22 พฤษภาคม 2565 .
- ^ " กลุ่มบริษัท Siemens Mobility และ Stadler ชนะสัญญาปรับปรุงและยกระดับระบบรถไฟฟ้าใต้ดินลิสบอน" (ข่าวประชาสัมพันธ์) Siemens Mobility 10 พฤษภาคม 2021 เก็บถาวรจากต้นฉบับเมื่อ 25 กันยายน 2024 เรียกดูเมื่อ25 กันยายน 2024
- ^三菱電機、東京メTORロ丸ノ内線に列車制御しステム向け無線装置を納入(in ภาษาญี่ปุ่น) , Mynavi Corporation , February 22, 2018
- ^ Artymiuk, Simon (7 มีนาคม 2023). "MTA มอบสัญญา CBTC สาย Crosstown ให้กับ Thales และ TCE" . International Railway Journal . สืบค้นเมื่อ4 สิงหาคม 2024 .
- ^ "เทคโนโลยีระบบส่งสัญญาณในเมืองชั้นนำของ Alstom ได้รับเลือกเพื่อยกระดับการเชื่อมต่อของผู้โดยสารบนรถไฟฟ้า Metro do Porto สายสีชมพูในโปรตุเกส" (ข่าวประชาสัมพันธ์) Alstom. 12 มีนาคม 2024. เก็บถาวรจากต้นฉบับเมื่อ 24 พฤษภาคม 2024. สืบค้นเมื่อ25 กันยายน 2024 .
- ^ "MDOT MTA จะทดสอบระบบ CTBC ในสถานีรถไฟใต้ดิน"นิตยสารMass Transit (ข่าวประชาสัมพันธ์) 2 ตุลาคม 2024 สืบค้นเมื่อ15 ธันวาคม 2024
- ↑ "เลน เกบุต เปงเกอร์จาน ระบบเปอร์ซินยาลัน เคเรตา ตันปา มาซินีส LRT จาโบเดเบก" . PT Len Industri (ในภาษาอินโดนีเซีย) 14 กันยายน 2564 . สืบค้นเมื่อ2026-04-28 .
- ↑ยูเวน, โอลาฟ (2025-12-02). "T-banen får nytt signalanlegg – skal bli flere tog og færre forsinkelser" . NRK (ในภาษานอร์เวย์ บุ๊กมอล) สืบค้นเมื่อ30-12-2025 .
- ^ "ซีเมนส์ขับเคลื่อนระบบดิจิทัลของรถไฟใต้ดินออสโลด้วยเทคโนโลยีล้ำสมัย..." press.siemens.com . สืบค้นเมื่อ30 ธันวาคม 2025
อ่านเพิ่มเติม
- หวัง ชุนจุน (2026). การควบคุมรถไฟโดยใช้การสื่อสาร เล่ม 1: พื้นฐานและสถาปัตยกรรมทางเทคนิค . พรินซ์ตัน รัฐนิวเจอร์ซีย์: สำนักพิมพ์อิสระ. ISBN 979-8-258-54295-3.
- หวัง ชุนจุน (2026). การควบคุมรถไฟโดยใช้การสื่อสาร เล่ม 2: การปฏิบัติงาน การติดตั้งใช้งาน และเศรษฐศาสตร์ . พรินซ์ตัน รัฐนิวเจอร์ซีย์: สำนักพิมพ์อิสระ. ISBN 979-8-258-54528-2.
- บริษัท อาร์เจนตินา เรลเวย์ เทคโนโลยีส์ เซฟเน็ต ซีบีทีซี
- Thales SelTrac(R) CBTC
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ การควบคุมรถไฟโดยใช้การสื่อสาร
ระบบ ควบคุมการเดินรถโดยใช้การสื่อสาร ( CBTC ) คือ ระบบ ส่งสัญญาณทางรถไฟ ที่ใช้ การสื่อสาร ระหว่าง รถไฟ และอุปกรณ์บนรางเพื่อการจัดการจราจรและการควบคุมโครงสร้างพื้นฐาน CBTC...
ภูมิหลังและที่มา
CBTC เป็นมาตรฐานการส่งสัญญาณที่กำหนดโดย มาตรฐาน IEEE 1474 [ 1 ] เวอร์ชันดั้งเดิมเปิดตัวในปี 1999 และได้รับการปรับปรุงในปี 2004 [ 1 ]...
บล็อกเคลื่อนที่
ระบบสัญญาณแบบดั้งเดิมจะตรวจจับรถไฟในส่วนต่างๆ ของรางที่เรียกว่า ' บล็อก ' โดยแต่ละบล็อกจะมีสัญญาณป้องกันเพื่อไม่ให้รถไฟเข้าไปในบล็อกที่มีรถไฟอยู่แล้ว เนื่องจากแต่ละบล็อกเป็นส่วนของรางที่กำหนดไว้ ระบบเหล่านี้จึงเรียกว่าระบบ บล็อกคงที่ [ 8 ]
CBTC และบล็อกเคลื่อนที่
ระบบ CBTC เป็นระบบส่งสัญญาณทางรถไฟที่ทันสมัย ซึ่งส่วนใหญ่ใช้ในเส้นทางรถไฟในเมือง (ทั้งรถไฟ ขนาดเล็ก และ ขนาดใหญ่ ) และ รถไฟ APM แม้ว่าจะสามารถใช้ใน เส้นทางรถไฟชานเมือง ได้เช่นกัน สำหรับ เส้นทางหลัก ระบบที่คล้ายกันอาจเป็น ระบบการจัดการจราจรทางรถไฟของยุโรป...