ในโทโพโลยีเชิงอนุพันธ์ เจ็ตบันเดิล เป็นโครงสร้างชนิดหนึ่งที่สร้างไฟเบอร์บัน เดิล เรียบ ใหม่ จากไฟเบอร์บันเดิลเรียบที่กำหนดให้ ทำให้สามารถเขียนสมการเชิงอนุพันธ์ บนส่วนต่างๆ ของไฟเบอร์บันเดิลในรูปแบบที่ไม่เปลี่ยนแปลงได้เจ็ต อาจมองได้ว่าเป็นรูปแบบที่ไม่ขึ้นกับพิกัดของการกระจายเทย์เลอร์ ด้วย เช่นกัน
ในทางประวัติศาสตร์ กลุ่มเจ็ท (jet bundles) ถูกยกให้เป็นผลงานของชาร์ลส์ เอเรสแมนน์ (Charles Ehresmann ) และเป็นการพัฒนาต่อยอดจากวิธีการ ( การขยาย ) ของเอลี คาร์ตัน (Élie Cartan ) ในการจัดการกับอนุพันธ์อันดับสูง ในเชิงเรขาคณิต โดยการกำหนด เงื่อนไข รูปแบบเชิงอนุพันธ์ ให้กับตัวแปรเชิงรูปธรรมที่เพิ่งนำมาใช้ใหม่ กลุ่มเจ็ทบางครั้งเรียกว่าสเปรย์ (sprays ) แม้ว่า โดยทั่วไปแล้ว สเปรย์ จะหมายถึงสนามเวกเตอร์ ที่เกี่ยวข้อง ซึ่งเกิดขึ้นบนกลุ่มเจ็ทนั้นๆ (เช่นสเปรย์จีโอเดสิก บนแมนิโฟลด์ฟินส์ เลอร์ )
ตั้งแต่ช่วงต้นทศวรรษ 1980 เจ็ตบันเดิลได้ปรากฏขึ้นเป็นวิธีการกระชับในการอธิบายปรากฏการณ์ที่เกี่ยวข้องกับอนุพันธ์ของแผนที่ โดยเฉพาะอย่างยิ่งที่เกี่ยวข้องกับแคลคูลัสของการแปรผัน [ 1 ] ด้วย ทฤษฎีสนามโคแวเรียนต์เชิง เรขาคณิต และมีการทำงานมากมายในการกำหนด สูตรสัม พัทธภาพทั่วไป ของสนามโดยใช้วิธีการนี้
เจ็ตส์ สมมติว่าM เป็นแมนิโฟลด์ มิติm และ ( E , π, M ) เป็นไฟเบอร์บันเดิ ล สำหรับp ∈ M ให้ Γ(p) แทนเซตของส่วนตัดเฉพาะที่ทั้งหมดซึ่งโดเมนประกอบด้วยp ให้ เป็นดัชนีหลายตัว ( ทูเปิล m ของจำนวนเต็มที่ไม่เป็นลบ ไม่จำเป็นต้องเรียงลำดับจากน้อยไปมาก) จากนั้นกำหนด: ฉัน = ( ฉัน ( 1 ) , ฉัน ( 2 ) , . . . , ฉัน ( ม ) ) {\displaystyle I=(I(1),I(2),...,I(m))}
| ฉัน | := ∑ ฉัน = 1 ม ฉัน ( ฉัน ) ∂ | ฉัน | ∂ x ฉัน := ∏ ฉัน = 1 ม ( ∂ ∂ x ฉัน ) ฉัน ( ฉัน ) . {\displaystyle {\begin{aligned}|I|&:=\sum _{i=1}^{m}I(i)\\{\frac {\partial ^{|I|}}{\partial x^{I}}}&:=\prod _{i=1}^{m}\left({\frac {\partial }{\partial x^{i}}}\right)^{I(i)}.\end{aligned}}} กำหนดส่วนท้องถิ่น σ, η ∈ Γ(p) ให้มีr -jetp ถ้า
∂ | ฉัน | σ α ∂ x ฉัน | พี = ∂ | ฉัน | η α ∂ x ฉัน | พี , 0 ≤ | ฉัน | ≤ ร . {\displaystyle \left.{\frac {\partial ^{|I|}\sigma ^{\alpha }}{\partial x^{I}}}\right|_{p}=\left.{\frac {\partial ^{|I|}\eta ^{\alpha }}{\partial x^{I}}}\right|_{p},\quad 0\leq |I|\leq r.} ความสัมพันธ์ที่แผนที่สองแผนที่มี r -jet เดียวกัน เรียก ว่าความสัมพันธ์สมมูล r - jet คือชั้นสมมูล ภายใต้ความสัมพันธ์นี้ และr -jet ที่มีตัวแทน σ จะถูกแทนด้วย r-jet จำนวนเต็มr ยังเรียกว่าอันดับ ของ jet, p คือแหล่งกำเนิด และ σ( p ) คือเป้าหมาย เจ พี ร σ {\displaystyle j_{p}^{r}\sigma }
ท่อร่วมไอพ่น ระนาบ เจ็ทที่ r ของ π
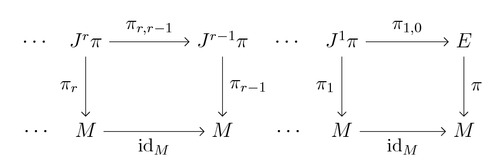
เจ ร ( π ) = { เจ พี ร σ : พี ∈ เอ็ม , σ ∈ Γ ( พี ) } . {\displaystyle J^{r}(\pi )=\left\{j_{p}^{r}\sigma :p\in M,\sigma \in \Gamma (p)\right\}.} เราอาจกำหนดโปรเจคชั่นπ r และπ r ,0โปรเจคชั่นต้นทางและโปรเจคชั่นเป้าหมาย ตามลำดับ โดย
{ π ร : เจ ร ( π ) → เอ็ม เจ พี ร σ ↦ พี , { π ร , 0 : เจ ร ( π ) → อี เจ พี ร σ ↦ σ ( พี ) {\displaystyle {\begin{cases}\pi _{r}:J^{r}(\pi )\to M\\j_{p}^{r}\sigma \mapsto p\end{cases}},\qquad {\begin{cases}\pi _{r,0}:J^{r}(\pi )\to E\\j_{p}^{r}\sigma \mapsto \sigma (p)\end{cases}}} ถ้า 1 ≤ k ≤ r แล้ว การฉายภาพ k -jetπ r,k ที่กำหนดโดย
{ π ร , เค : เจ ร ( π ) → เจ เค ( π ) เจ พี ร σ ↦ เจ พี เค σ {\displaystyle {\begin{cases}\pi _{r,k}:J^{r}(\pi )\to J^{k}(\pi )\\j_{p}^{r}\sigma \mapsto j_{p}^{k}\sigma \end{cases}}}
จากนิยามนี้ เป็นที่ชัดเจนว่าπ r = π o π r ,0m ≤ k แล้วπ r,m = π k,m o π r,k โดยทั่วไปแล้ว มักจะถือว่าπ r,r เป็นแผนที่เอกลักษณ์ บนJ r ( π ) และ ระบุJ 0 ( π ) กับE
ฟังก์ชันπ r,k , π r ,0π r เป็นการจุ่มใต้น้ำ แบบ ผ่าตัด เรียบ
ระบบพิกัด บนE จะสร้างระบบพิกัดบนJ r ( π ) ให้ ( U , u ) เป็นแผนภูมิพิกัด ที่ปรับแล้ว บนE โดยที่u = ( x i , u α ) แผนภูมิพิกัดที่เหนี่ยวนำ ( U r , u r ) บนJ r ( π ) ถูกกำหนดโดย
ยู ร = { เจ พี ร σ : พี ∈ เอ็ม , σ ( พี ) ∈ ยู } คุณ ร = ( x ฉัน , คุณ α , คุณ ฉัน α ) {\displaystyle {\begin{aligned}U^{r}&=\left\{j_{p}^{r}\sigma :p\in M,\sigma (p)\in U\right\}\\u^{r}&=\left(x^{i},u^{\alpha },u_{I}^{\alpha }\right)\end{aligned}}}
ที่ไหน
x ฉัน ( เจ พี ร σ ) = x ฉัน ( พี ) คุณ α ( เจ พี ร σ ) = คุณ α ( σ ( พี ) ) {\displaystyle {\begin{aligned}x^{i}\left(j_{p}^{r}\sigma \right)&=x^{i}(p)\\u^{\alpha }\left(j_{p}^{r}\sigma \right)&=u^{\alpha }(\sigma (p))\end{aligned}}}
และฟังก์ชันที่เรียกว่าพิกัดอนุพันธ์ : n ( ( ม + ร ร ) − 1 ) {\displaystyle n\left({\binom {m+r}{r}}-1\right)}
{ คุณ ฉัน α : ยู เค → อาร์ คุณ ฉัน α ( เจ พี ร σ ) = ∂ | ฉัน | σ α ∂ x ฉัน | พี {\displaystyle {\begin{cases}u_{I}^{\alpha }:U^{k}\to \mathbf {R} \\u_{I}^{\alpha }\left(j_{p}^{r}\sigma \right)=\left.{\frac {\partial ^{|I|}\sigma ^{\alpha }}{\partial x^{I}}}\right|_{p}\end{cases}}}
เมื่อกำหนดแอตลาสของแผนภูมิที่ปรับเปลี่ยน ( U , u ) บนE แล้ว ชุดแผนภูมิที่สอดคล้องกัน ( U r , u r ) จะเป็น แอตลาส C ∞ มิติจำกัด บนJ r π )
แพ็กเกจเครื่องบินเจ็ต เนื่องจากแอตลาสบนแต่ละอันกำหนดแมนิโฟลด์ ดังนั้นสามสิ่ง, และทั้งหมดจึงกำหนดแมนิโฟลด์แบบไฟเบอร์ โดยเฉพาะอย่างยิ่ง ถ้าเป็นไฟเบอร์บันเดิล สามสิ่ง จะกำหนด เจ็ทบันเดิลที่ r ของ π เจ ร ( π ) {\displaystyle J^{r}(\pi )} ( เจ ร ( π ) , π ร , เค , เจ เค ( π ) ) {\displaystyle (J^{r}(\pi ),\pi _{r,k},J^{k}(\pi ))} ( เจ ร ( π ) , π ร , 0 , อี ) {\displaystyle (J^{r}(\pi ),\pi _{r,0},E)} ( เจ ร ( π ) , π ร , เอ็ม ) {\displaystyle (J^{r}(\pi ),\pi _{r},M)} ( อี , π , เอ็ม ) {\displaystyle (E,\pi ,M)} ( เจ ร ( π ) , π ร , เอ็ม ) {\displaystyle (J^{r}(\pi ),\pi _{r},M)}
ถ้าW ⊂ M เป็นซับแมนิโฟลด์แบบเปิดแล้ว
เจ ร ( π | π − 1 ( ว ) ) ≅ π ร − 1 ( ว ) . {\displaystyle J^{r}\left(\pi |_{\pi ^{-1}(W)}\right)\cong \pi _{r}^{-1}(W).\,} ถ้าp ∈ M แล้ว ไฟเบอร์จะถูกแทนด้วย. π ร − 1 ( พี ) {\displaystyle \pi _{r}^{-1}(p)\,} เจ พี ร ( π ) {\displaystyle J_{p}^{r}(\pi )}
ให้ σ เป็นส่วนตัดเฉพาะที่ของ π ที่มีโดเมนW ⊂ M การต่อขยายเจ็ทลำดับ ที่r ของ σเจ ร σ : ว → เจ ร ( π ) {\displaystyle j^{r}\sigma :W\rightarrow J^{r}(\pi )}
( เจ ร σ ) ( พี ) = เจ พี ร σ . {\displaystyle (j^{r}\sigma )(p)=j_{p}^{r}\sigma .\,} โปรดทราบว่าดังนั้นจึงเป็นส่วนหนึ่งจริงๆ ในพิกัดท้องถิ่น จะกำหนดโดย π ร ∘ เจ ร σ = ฉัน ง ว {\displaystyle \pi _{r}\circ j^{r}\sigma =\mathbb {id} _{W}} เจ ร σ {\displaystyle j^{r}\sigma } เจ ร σ {\displaystyle j^{r}\sigma }
( σ α , ∂ | ฉัน | σ α ∂ x ฉัน ) 1 ≤ | ฉัน | ≤ ร . {\displaystyle \left(\sigma ^{\alpha },{\frac {\partial ^{|I|}\sigma ^{\alpha }}{\partial x^{I}}}\right)\qquad 1\leq |I|\leq r.\,} เรามีความรู้สึก ร่วมกับ ... เจ 0 σ {\displaystyle j^{0}\sigma } σ {\displaystyle \sigma }
มุมมองเชิงพีชคณิตเรขาคณิต มีการนำเสนอ การสร้างกลุ่มส่วนต่างๆ ที่มีแรงจูงใจอย่างอิสระΓ เจ เค ( π ที เอ็ม ) {\displaystyle \Gamma J^{k}\left(\pi _{TM}\right)}
พิจารณาแผนที่แนวทแยงมุมโดยที่แมนิโฟลด์เรียบเป็นปริภูมิวงแหวนเฉพาะ ที่โดยสำหรับแต่ละเปิดให้เป็นชีฟอุดมคติ ของหรือเทียบเท่ากับให้เป็นชีฟ ของ เจิร์ม เรียบซึ่งหายไปบนสำหรับทุกการดึงกลับ ของชีฟผลหาร จากไปยังโดยคือชีฟของ k-เจ็ต[ 2 ] Δ n : เอ็ม → ∏ ฉัน = 1 n + 1 เอ็ม {\textstyle \Delta _{n}:M\to \prod _{i=1}^{n+1}M} เอ็ม {\displaystyle M} ซี เค ( ยู ) {\displaystyle C^{k}(U)} ยู {\displaystyle U} ฉัน {\displaystyle {\คณิตศาสตร์ {I}}} Δ n ( เอ็ม ) {\displaystyle \Delta _{n}(M)} ฉัน {\displaystyle {\คณิตศาสตร์ {I}}} Δ n ( เอ็ม ) {\displaystyle \Delta _{n}(M)} 0 < n ≤ เค {\displaystyle 0<n\leq k} Δ n * ( ฉัน / ฉัน n + 1 ) {\displaystyle {\Delta _{n}}^{*}\left({\mathcal {I}}/{\mathcal {I}}^{n+1}\right)} ∏ ฉัน = 1 n + 1 เอ็ม {\textstyle \prod _{i=1}^{n+1}M} เอ็ม {\displaystyle M} Δ n {\displaystyle \Delta _{n}}
ขีดจำกัดโดยตรง ของลำดับการฉีดที่กำหนดโดยการรวมเชิงแคนอนของชีฟ ก่อให้เกิดชีฟเจ็ทอนันต์ สังเกตว่าโดยการสร้างขีดจำกัดโดยตรง มันคือวงแหวนกรอง ฉัน n + 1 ↪ ฉัน n {\displaystyle {\mathcal {I}}^{n+1}\hookrightarrow {\mathcal {I}}^{n}} เจ ∞ ( ที เอ็ม ) {\displaystyle {\mathcal {J}}^{\infty }(TM)}
ตัวอย่าง ถ้า π คือบันเดิลที่ไม่สำคัญ ( M × R , pr 1 , M ) แล้วจะมีดิฟเฟโอเมอร์ฟิซึม แบบแคนอนิก อยู่ระหว่างบันเดิลเจ็ทแรกกับT*M × R ในการสร้างดิฟเฟโอเมอร์ฟิซึมนี้ สำหรับแต่ละ σ ในให้ เขียนเจ 1 ( π ) {\displaystyle J^{1}(\pi )} Γ เอ็ม ( π ) {\displaystyle \Gamma _{M}(\pi )} σ ¯ = พี ร 2 ∘ σ ∈ ซี ∞ ( เอ็ม ) {\displaystyle {\bar {\sigma }}=pr_{2}\circ \sigma \in C^{\infty }(M)\,}
จากนั้น เมื่อใดก็ตามที่p ∈ M
เจ พี 1 σ = { ψ : ψ ∈ Γ พี ( π ) ; ψ ¯ ( พี ) = σ ¯ ( พี ) ; ง ψ ¯ พี = ง σ ¯ พี } . {\displaystyle j_{p}^{1}\sigma =\left\{\psi :\psi \in \Gamma _{p}(\pi );{\bar {\psi }}(p)={\bar {\sigma }}(p);d{\bar {\psi }}_{p}=d{\bar {\sigma }}_{p}\right\}.\,} ดังนั้น การทำแผนที่
{ J 1 ( π ) → T ∗ M × R j p 1 σ ↦ ( d σ ¯ p , σ ¯ ( p ) ) {\displaystyle {\begin{cases}J^{1}(\pi )\to T^{*}M\times \mathbf {R} \\j_{p}^{1}\sigma \mapsto \left(d{\bar {\sigma }}_{p},{\bar {\sigma }}(p)\right)\end{cases}}} มีนิยามที่ชัดเจนและเป็นฟังก์ชันหนึ่งต่อหนึ่ง อย่างชัดเจน การเขียนออกมาในรูปพิกัดแสดงให้เห็นว่าเป็นฟังก์ชันดิฟเฟโอเมอร์ฟิซึม เพราะถ้า(x i , u) เป็นพิกัดบนM × R โดยที่u = id R u i บนJ 1 (π) จะสอดคล้องกับพิกัด ∂ i T* M
ในทำนองเดียวกัน ถ้า π คือบันเดิลที่ไม่สำคัญ ( R × M , pr 1 , R ) แล้วจะมีดิฟเฟอเรนเชียลมอร์ฟิซึมระหว่างและR × TM J 1 ( π ) {\displaystyle J^{1}(\pi )}
ปริภูมิJ r (π) มีการกระจาย ตามธรรมชาติ นั่นคือ สับบันเดิลของบันเดิลสัมผัส TJ r (π)) เรียกว่าการกระจายแบบคาร์ตัน การกระจายแบบคาร์ตันถูกสร้างขึ้นโดยระนาบสัมผัสทั้งหมดไปยังกราฟของส่วนตัดโฮโลโนมิก นั่นคือ ส่วนตัดในรูปแบบj r φ สำหรับφ เป็นส่วนตัดของ π
ตัวทำลายของการแจกแจงคาร์ตันคือปริภูมิของรูปแบบหนึ่งเชิงอนุพันธ์ ที่เรียกว่ารูปแบบสัมผัส บน J r (π) ปริภูมิของรูปแบบหนึ่งเชิงอนุพันธ์บนJ r (π) จะถูกแทนด้วยและปริภูมิของรูปแบบสัมผัสจะถูกแทนด้วยรูปแบบหนึ่งเป็นรูปแบบสัมผัสก็ต่อเมื่อการดึงกลับ ตามการต่อขยายทุกส่วนเป็นศูนย์ กล่าวอีกนัยหนึ่งเป็นรูปแบบสัมผัสก็ต่อเมื่อ Λ 1 J r ( π ) {\displaystyle \Lambda ^{1}J^{r}(\pi )} Λ C r π {\displaystyle \Lambda _{C}^{r}\pi } θ ∈ Λ 1 J r π {\displaystyle \theta \in \Lambda ^{1}J^{r}\pi }
( j r + 1 σ ) ∗ θ = 0 {\displaystyle \left(j^{r+1}\sigma \right)^{*}\theta =0} สำหรับส่วนท้องถิ่นทั้งหมด σ ของ π ส่วน M
การกระจายแบบคาร์ตัน (Cartan distribution) เป็นโครงสร้างทางเรขาคณิตหลักในปริภูมิเจ็ต (jet space) และมีบทบาทสำคัญในทฤษฎีเรขาคณิตของสมการเชิงอนุพันธ์ย่อย (partial differential equations ) การกระจายแบบคาร์ตันนั้นไม่สามารถหาปริพันธ์ได้โดยสมบูรณ์ โดยเฉพาะอย่างยิ่ง มันไม่เป็นแบบผกผัน (involutive ) มิติของการกระจายแบบคาร์ตันจะเพิ่มขึ้นตามลำดับของปริภูมิเจ็ต อย่างไรก็ตาม ในปริภูมิของเจ็ตอนันต์J ∞ การกระจายแบบคาร์ตันจะกลายเป็นแบบผกผันและมีมิติจำกัด กล่าวคือ มิติของมันตรงกับมิติของแมนิโฟลด์ฐาน M
ตัวอย่าง พิจารณากรณี(E, π, M) โดยที่E ≃ R 2 และM ≃ R จากนั้น(J 1 (π), π, M) จะกำหนดกลุ่มเจ็ทแรก และอาจประสานงานโดย(x, u, u 1 ) โดยที่
x ( j p 1 σ ) = x ( p ) = x u ( j p 1 σ ) = u ( σ ( p ) ) = u ( σ ( x ) ) = σ ( x ) u 1 ( j p 1 σ ) = ∂ σ ∂ x | p = σ ′ ( x ) {\displaystyle {\begin{aligned}x\left(j_{p}^{1}\sigma \right)&=x(p)=x\\u\left(j_{p}^{1}\sigma \right)&=u(\sigma (p))=u(\sigma (x))=\sigma (x)\\u_{1}\left(j_{p}^{1}\sigma \right)&=\left.{\frac {\partial \sigma }{\partial x}}\right|_{p}=\sigma '(x)\end{aligned}}} สำหรับทุกp ∈ M และ σ ใน Γ p J 1 (π) มีรูปแบบดังนี้
θ = a ( x , u , u 1 ) d x + b ( x , u , u 1 ) d u + c ( x , u , u 1 ) d u 1 {\displaystyle \theta =a(x,u,u_{1})dx+b(x,u,u_{1})du+c(x,u,u_{1})du_{1}\,} ส่วน σ ใน Γ p
j 1 σ = ( u , u 1 ) = ( σ ( p ) , ∂ σ ∂ x | p ) . {\displaystyle j^{1}\sigma =(u,u_{1})=\left(\sigma (p),\left.{\frac {\partial \sigma }{\partial x}}\right|_{p}\right).} ดังนั้น(j 1 σ)*θ สามารถคำนวณได้ดังนี้
( j p 1 σ ) ∗ θ = θ ∘ j p 1 σ = a ( x , σ ( x ) , σ ′ ( x ) ) d x + b ( x , σ ( x ) , σ ′ ( x ) ) d ( σ ( x ) ) + c ( x , σ ( x ) , σ ′ ( x ) ) d ( σ ′ ( x ) ) = a ( x , σ ( x ) , σ ′ ( x ) ) d x + b ( x , σ ( x ) , σ ′ ( x ) ) σ ′ ( x ) d x + c ( x , σ ( x ) , σ ′ ( x ) ) σ ″ ( x ) d x = [ a ( x , σ ( x ) , σ ′ ( x ) ) + b ( x , σ ( x ) , σ ′ ( x ) ) σ ′ ( x ) + c ( x , σ ( x ) , σ ′ ( x ) ) σ ″ ( x ) ] d x {\displaystyle {\begin{aligned}\left(j_{p}^{1}\sigma \right)^{*}\theta &=\theta \circ j_{p}^{1}\sigma \\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))d(\sigma (x))+c(x,\sigma (x),\sigma '(x))d(\sigma '(x))\\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))\sigma '(x)dx+c(x,\sigma (x),\sigma '(x))\sigma ''(x)dx\\&=[a(x,\sigma (x),\sigma '(x))+b(x,\sigma (x),\sigma '(x))\sigma '(x)+c(x,\sigma (x),\sigma '(x))\sigma ''(x)]dx\end{aligned}}} สิ่งนี้จะหายไปสำหรับทุกส่วน σ ก็ต่อเมื่อc = 0 และa = − bσ′(x) เท่านั้น ดังนั้น θ = b(x, u, u 1 )θ 0 จะต้องเป็นผลคูณของรูปแบบสัมผัสพื้นฐาน θ 0 = du − u 1 dx ดำเนินการต่อไปยังปริภูมิเจ็ทที่สองJ 2 (π) ที่มีพิกัดเพิ่มเติมu 2 เช่นนั้น
u 2 ( j p 2 σ ) = ∂ 2 σ ∂ x 2 | p = σ ″ ( x ) {\displaystyle u_{2}(j_{p}^{2}\sigma )=\left.{\frac {\partial ^{2}\sigma }{\partial x^{2}}}\right|_{p}=\sigma ''(x)\,} รูปแบบทั่วไป 1 รูปแบบมีโครงสร้างดังนี้
θ = a ( x , u , u 1 , u 2 ) d x + b ( x , u , u 1 , u 2 ) d u + c ( x , u , u 1 , u 2 ) d u 1 + e ( x , u , u 1 , u 2 ) d u 2 {\displaystyle \theta =a(x,u,u_{1},u_{2})dx+b(x,u,u_{1},u_{2})du+c(x,u,u_{1},u_{2})du_{1}+e(x,u,u_{1},u_{2})du_{2}\,} นี่คือแบบฟอร์มติดต่อก็ต่อเมื่อ...
( j p 2 σ ) ∗ θ = θ ∘ j p 2 σ = a ( x , σ ( x ) , σ ′ ( x ) , σ ″ ( x ) ) d x + b ( x , σ ( x ) , σ ′ ( x ) , σ ″ ( x ) ) d ( σ ( x ) ) + c ( x , σ ( x ) , σ ′ ( x ) , σ ″ ( x ) ) d ( σ ′ ( x ) ) + e ( x , σ ( x ) , σ ′ ( x ) , σ ″ ( x ) ) d ( σ ″ ( x ) ) = a d x + b σ ′ ( x ) d x + c σ ″ ( x ) d x + e σ ‴ ( x ) d x = [ a + b σ ′ ( x ) + c σ ″ ( x ) + e σ ‴ ( x ) ] d x = 0 {\displaystyle {\begin{aligned}\left(j_{p}^{2}\sigma \right)^{*}\theta &=\theta \circ j_{p}^{2}\sigma \\&=a(x,\sigma (x),\sigma '(x),\sigma ''(x))dx+b(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma (x))+{}\\&\qquad \qquad c(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma '(x))+e(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma ''(x))\\&=adx+b\sigma '(x)dx+c\sigma ''(x)dx+e\sigma '''(x)dx\\&=[a+b\sigma '(x)+c\sigma ''(x)+e\sigma '''(x)]dx\\&=0\end{aligned}}} ซึ่งหมายความว่าe = 0 และa = − bσ′(x) − cσ′′(x) ดังนั้น θ เป็นรูปแบบสัมผัสก็ต่อเมื่อ
θ = b ( x , σ ( x ) , σ ′ ( x ) ) θ 0 + c ( x , σ ( x ) , σ ′ ( x ) ) θ 1 , {\displaystyle \theta =b(x,\sigma (x),\sigma '(x))\theta _{0}+c(x,\sigma (x),\sigma '(x))\theta _{1},} โดยที่ θ 1 = du 1 − u 2 dx คือรูปแบบการสัมผัสพื้นฐานถัดไป (โปรดทราบว่าในที่นี้เรากำลังระบุรูปแบบ θ 0 กับการดึงกลับไปที่J 2 (π) ) ( π 2 , 1 ) ∗ θ 0 {\displaystyle \left(\pi _{2,1}\right)^{*}\theta _{0}}
โดยทั่วไปแล้ว หากกำหนดให้x, u ∈ R รูปแบบการสัมผัสบนJ r+1 (π) สามารถเขียนได้ในรูปผลรวมเชิงเส้น ของรูปแบบการสัมผัสพื้นฐาน
θ k = d u k − u k + 1 d x k = 0 , … , r − 1 {\displaystyle \theta _{k}=du_{k}-u_{k+1}dx\qquad k=0,\ldots ,r-1\,} ที่ไหน
u k ( j k σ ) = ∂ k σ ∂ x k | p . {\displaystyle u_{k}\left(j^{k}\sigma \right)=\left.{\frac {\partial ^{k}\sigma }{\partial x^{k}}}\right|_{p}.} เหตุผลที่คล้ายคลึงกันนี้ นำไปสู่การกำหนดลักษณะเฉพาะของรูปแบบการติดต่อทั้งหมดได้อย่างครบถ้วน
ในพิกัดท้องถิ่น รูปแบบสัมผัสหนึ่งเดียวทุกรูปแบบบนJ r+1 (π) สามารถเขียนได้ในรูปผลรวมเชิงเส้น
θ = ∑ | I | = 0 r P α I θ I α {\displaystyle \theta =\sum _{|I|=0}^{r}P_{\alpha }^{I}\theta _{I}^{\alpha }} ด้วยค่าสัมประสิทธิ์ที่ราบเรียบของรูปแบบการสัมผัสพื้นฐาน P i α ( x i , u α , u I α ) {\displaystyle P_{i}^{\alpha }(x^{i},u^{\alpha },u_{I}^{\alpha })}
θ I α = d u I α − u I , i α d x i {\displaystyle \theta _{I}^{\alpha }=du_{I}^{\alpha }-u_{I,i}^{\alpha }dx^{i}\,} |I| เรียกว่าลำดับ ของแบบฟอร์มการติดต่อโปรดทราบว่าแบบฟอร์มการติดต่อบนJ r+1 (π) มีลำดับไม่เกินr แบบฟอร์มการติดต่อให้ลักษณะเฉพาะของส่วนท้องถิ่นของπ r+1 θ i α {\displaystyle \theta _{i}^{\alpha }}
กำหนดให้ ψ ∈ Γ W π r+1 ) แล้วψ = j r+1 σ โดยที่ σ ∈ Γ W ψ ∗ ( θ | W ) = 0 , ∀ θ ∈ Λ C 1 π r + 1 , r . {\displaystyle \psi ^{*}(\theta |_{W})=0,\forall \theta \in \Lambda _{C}^{1}\pi _{r+1,r}.\,}
สนามเวกเตอร์ สนามเวกเตอร์ ทั่วไปบนปริภูมิทั้งหมดE ซึ่งมีพิกัดเป็นคือ ( x , u ) = d e f ( x i , u α ) {\displaystyle (x,u)\mathrel {\stackrel {\mathrm {def} }{=}} \left(x^{i},u^{\alpha }\right)\,}
V = d e f ρ i ( x , u ) ∂ ∂ x i + ϕ α ( x , u ) ∂ ∂ u α . {\displaystyle V\mathrel {\stackrel {\mathrm {def} }{=}} \rho ^{i}(x,u){\frac {\partial }{\partial x^{i}}}+\phi ^{\alpha }(x,u){\frac {\partial }{\partial u^{\alpha }}}.\,} สนามเวกเตอร์เรียกว่าสนามเวกเตอร์แนวนอน หมายความว่าสัมประสิทธิ์แนวตั้งทั้งหมดเป็นศูนย์ ถ้า= 0 ϕ α {\displaystyle \phi ^{\alpha }}
เวกเตอร์ฟิลด์เรียกว่าเวกเตอร์ฟิลด์แนวตั้ง หมายความว่าสัมประสิทธิ์แนวนอนทั้งหมดเป็นศูนย์ ถ้าρ i = 0
สำหรับค่า(x, u) ที่กำหนดไว้ เราจะระบุ
V ( x , u ) = d e f ρ i ( x , u ) ∂ ∂ x i + ϕ α ( x , u ) ∂ ∂ u α {\displaystyle V_{(x,u)}\mathrel {\stackrel {\mathrm {def} }{=}} \rho ^{i}(x,u){\frac {\partial }{\partial x^{i}}}+\phi ^{\alpha }(x,u){\frac {\partial }{\partial u^{\alpha }}}\,} มีพิกัด(x, u, ρ i , φ α ) โดยมีองค์ประกอบในไฟเบอร์T xu E ของTE เหนือ(x, u) ในE เรียกว่าเวกเตอร์สัมผัส ในTE ส่วนตัด
{ ψ : E → T E ( x , u ) ↦ ψ ( x , u ) = V {\displaystyle {\begin{cases}\psi :E\to TE\\(x,u)\mapsto \psi (x,u)=V\end{cases}}} เรียกว่าสนามเวกเตอร์บนE ที่มี
V = ρ i ( x , u ) ∂ ∂ x i + ϕ α ( x , u ) ∂ ∂ u α {\displaystyle V=\rho ^{i}(x,u){\frac {\partial }{\partial x^{i}}}+\phi ^{\alpha }(x,u){\frac {\partial }{\partial u^{\alpha }}}} และ ψ ในΓ(TE )
มัดเจ็ทJ r (π) ถูกประสานโดย. สำหรับค่า(x, u, w) คงที่ ให้ระบุ ( x , u , w ) = d e f ( x i , u α , w i α ) {\displaystyle (x,u,w)\mathrel {\stackrel {\mathrm {def} }{=}} \left(x^{i},u^{\alpha },w_{i}^{\alpha }\right)\,}
V ( x , u , w ) = d e f V i ( x , u , w ) ∂ ∂ x i + V α ( x , u , w ) ∂ ∂ u α + V i α ( x , u , w ) ∂ ∂ w i α + V i 1 i 2 α ( x , u , w ) ∂ ∂ w i 1 i 2 α + ⋯ + V i 1 ⋯ i r α ( x , u , w ) ∂ ∂ w i 1 ⋯ i r α {\displaystyle V_{(x,u,w)}\mathrel {\stackrel {\mathrm {def} }{=}} V^{i}(x,u,w){\frac {\partial }{\partial x^{i}}}+V^{\alpha }(x,u,w){\frac {\partial }{\partial u^{\alpha }}}+V_{i}^{\alpha }(x,u,w){\frac {\partial }{\partial w_{i}^{\alpha }}}+V_{i_{1}i_{2}}^{\alpha }(x,u,w){\frac {\partial }{\partial w_{i_{1}i_{2}}^{\alpha }}}+\cdots +V_{i_{1}\cdots i_{r}}^{\alpha }(x,u,w){\frac {\partial }{\partial w_{i_{1}\cdots i_{r}}^{\alpha }}}} มีพิกัด
( x , u , w , v i α , v i 1 i 2 α , ⋯ , v i 1 ⋯ i r α ) , {\displaystyle \left(x,u,w,v_{i}^{\alpha },v_{i_{1}i_{2}}^{\alpha },\cdots ,v_{i_{1}\cdots i_{r}}^{\alpha }\right),} โดยมีองค์ประกอบในไฟเบอร์ของTJ r (π) เหนือ(x, u, w) ∈ J r (π) เรียกว่าเวกเตอร์สัมผัสใน TJ r (π) T x u w ( J r π ) {\displaystyle T_{xuw}(J^{r}\pi )}
v i α , v i 1 i 2 α , … , v i 1 ⋯ i r α {\displaystyle v_{i}^{\alpha },v_{i_{1}i_{2}}^{\alpha },\ldots ,v_{i_{1}\cdots i_{r}}^{\alpha }} เป็นฟังก์ชันค่าจริงบนJ r (π) ส่วน A
{ Ψ : J r ( π ) → T J r ( π ) ( x , u , w ) ↦ Ψ ( u , w ) = V {\displaystyle {\begin{cases}\Psi :J^{r}(\pi )\to TJ^{r}(\pi )\\(x,u,w)\mapsto \Psi (u,w)=V\end{cases}}} เป็นสนามเวกเตอร์บนJ r (π) และเรากล่าวว่าΨ ∈ Γ ( T ( J r π ) ) . {\displaystyle \Psi \in \Gamma (T\left(J^{r}\pi \right)).}
สมการเชิงอนุพันธ์ย่อย ให้(E, π, M) เป็นมัดไฟเบอร์สมการเชิงอนุพันธ์ย่อย อันดับ r ตัว แบบ ปิด S ของแมนิโฟลด์เจ็ทJ r (π) คำตอบคือส่วนตัดเฉพาะที่ σ ∈ Γ W p ในM j p r σ ∈ S {\displaystyle j_{p}^{r}\sigma \in S}
พิจารณาตัวอย่างสมการเชิงอนุพันธ์ย่อยอันดับหนึ่ง
ตัวอย่าง ให้ π เป็นบันเดิลแบบไม่สำคัญ ( R 2 × R , pr 1 , R 2 ) ที่มีพิกัดทั่วโลก ( x 1 , x 2 , u 1 ) จากนั้นแผนที่F : J 1 (π) → R ที่กำหนดโดย
F = u 1 1 u 2 1 − 2 x 2 u 1 {\displaystyle F=u_{1}^{1}u_{2}^{1}-2x^{2}u^{1}} ก่อให้เกิดสมการเชิงอนุพันธ์
S = { j p 1 σ ∈ J 1 π : ( u 1 1 u 2 1 − 2 x 2 u 1 ) ( j p 1 σ ) = 0 } {\displaystyle S=\left\{j_{p}^{1}\sigma \in J^{1}\pi \ :\ \left(u_{1}^{1}u_{2}^{1}-2x^{2}u^{1}\right)\left(j_{p}^{1}\sigma \right)=0\right\}} ซึ่งสามารถเขียนได้
∂ σ ∂ x 1 ∂ σ ∂ x 2 − 2 x 2 σ = 0. {\displaystyle {\frac {\partial \sigma }{\partial x^{1}}}{\frac {\partial \sigma }{\partial x^{2}}}-2x^{2}\sigma =0.} โดยเฉพาะอย่างยิ่ง
{ σ : R 2 → R 2 × R σ ( p 1 , p 2 ) = ( p 1 , p 2 , p 1 ( p 2 ) 2 ) {\displaystyle {\begin{cases}\sigma :\mathbf {R} ^{2}\to \mathbf {R} ^{2}\times \mathbf {R} \\\sigma (p_{1},p_{2})=\left(p^{1},p^{2},p^{1}(p^{2})^{2}\right)\end{cases}}} มีการยืดเวลาครั้งแรกโดย
j 1 σ ( p 1 , p 2 ) = ( p 1 , p 2 , p 1 ( p 2 ) 2 , ( p 2 ) 2 , 2 p 1 p 2 ) {\displaystyle j^{1}\sigma \left(p_{1},p_{2}\right)=\left(p^{1},p^{2},p^{1}\left(p^{2}\right)^{2},\left(p^{2}\right)^{2},2p^{1}p^{2}\right)} และเป็นคำตอบของสมการเชิงอนุพันธ์นี้ เพราะว่า
( u 1 1 u 2 1 − 2 x 2 u 1 ) ( j p 1 σ ) = u 1 1 ( j p 1 σ ) u 2 1 ( j p 1 σ ) − 2 x 2 ( j p 1 σ ) u 1 ( j p 1 σ ) = ( p 2 ) 2 ⋅ 2 p 1 p 2 − 2 ⋅ p 2 ⋅ p 1 ( p 2 ) 2 = 2 p 1 ( p 2 ) 3 − 2 p 1 ( p 2 ) 3 = 0 {\displaystyle {\begin{aligned}\left(u_{1}^{1}u_{2}^{1}-2x^{2}u^{1}\right)\left(j_{p}^{1}\sigma \right)&=u_{1}^{1}\left(j_{p}^{1}\sigma \right)u_{2}^{1}\left(j_{p}^{1}\sigma \right)-2x^{2}\left(j_{p}^{1}\sigma \right)u^{1}\left(j_{p}^{1}\sigma \right)\\&=\left(p^{2}\right)^{2}\cdot 2p^{1}p^{2}-2\cdot p^{2}\cdot p^{1}\left(p^{2}\right)^{2}\\&=2p^{1}\left(p^{2}\right)^{3}-2p^{1}\left(p^{2}\right)^{3}\\&=0\end{aligned}}} และด้วยเหตุนี้ สำหรับทุก p ∈ R 2 j p 1 σ ∈ S {\displaystyle j_{p}^{1}\sigma \in S}
การยืดเวลาของเจ็ท การแปลงแบบดิฟเฟอเรนเชียลเฉพาะที่ψ : J r ( π ) → J r ( π ) กำหนดการแปลงแบบสัมผัสที่มีอันดับr หากมันรักษาอุดมคติแบบสัมผัสไว้ ซึ่งหมายความว่าหาก θ เป็นรูปแบบสัมผัสใดๆ บนJ r ( π ) แล้วψ*θ ก็จะเป็นรูปแบบสัมผัสเช่นกัน
การไหลที่เกิดจากสนามเวกเตอร์V r บนพื้นที่เจ็ทJ r (π) ก่อให้เกิดกลุ่มการแปลงสัมผัสแบบพารามิเตอร์เดียวก็ต่อเมื่ออนุพันธ์ลี ของรูปแบบสัมผัส θ ใดๆ รักษาอุดมคติของสัมผัสไว้ L V r ( θ ) {\displaystyle {\mathcal {L}}_{V^{r}}(\theta )}
เรามาเริ่มต้นด้วยกรณีอันดับแรกกันก่อน พิจารณาเวกเตอร์ฟิลด์ทั่วไปV 1 บนJ 1 ( π ) ซึ่งกำหนดโดย
V 1 = d e f ρ i ( x i , u α , u I α ) ∂ ∂ x i + ϕ α ( x i , u α , u I α ) ∂ ∂ u α + χ i α ( x i , u α , u I α ) ∂ ∂ u i α . {\displaystyle V^{1}\ {\stackrel {\mathrm {def} }{=}}\ \rho ^{i}\left(x^{i},u^{\alpha },u_{I}^{\alpha }\right){\frac {\partial }{\partial x^{i}}}+\phi ^{\alpha }\left(x^{i},u^{\alpha },u_{I}^{\alpha }\right){\frac {\partial }{\partial u^{\alpha }}}+\chi _{i}^{\alpha }\left(x^{i},u^{\alpha },u_{I}^{\alpha }\right){\frac {\partial }{\partial u_{i}^{\alpha }}}.} ต่อไปนี้เราจะนำไปใช้กับรูปแบบการติดต่อพื้นฐานและขยายอนุพันธ์ภายนอก ของฟังก์ชันในแง่ของพิกัดเพื่อให้ได้: L V 1 {\displaystyle {\mathcal {L}}_{V^{1}}} θ 0 α = d u α − u i α d x i , {\displaystyle \theta _{0}^{\alpha }=du^{\alpha }-u_{i}^{\alpha }dx^{i},}
L V 1 ( θ 0 α ) = L V 1 ( d u α − u i α d x i ) = L V 1 d u α − ( L V 1 u i α ) d x i − u i α ( L V 1 d x i ) = d ( V 1 u α ) − V 1 u i α d x i − u i α d ( V 1 x i ) = d ϕ α − χ i α d x i − u i α d ρ i = ∂ ϕ α ∂ x i d x i + ∂ ϕ α ∂ u k d u k + ∂ ϕ α ∂ u i k d u i k − χ i α d x i − u i α [ ∂ ρ i ∂ x m d x m + ∂ ρ i ∂ u k d u k + ∂ ρ i ∂ u m k d u m k ] = ∂ ϕ α ∂ x i d x i + ∂ ϕ α ∂ u k ( θ k + u i k d x i ) + ∂ ϕ α ∂ u i k d u i k − χ i α d x i − u l α [ ∂ ρ l ∂ x i d x i + ∂ ρ l ∂ u k ( θ k + u i k d x i ) + ∂ ρ l ∂ u i k d u i k ] = [ ∂ ϕ α ∂ x i + ∂ ϕ α ∂ u k u i k − u l α ( ∂ ρ l ∂ x i + ∂ ρ l ∂ u k u i k ) − χ i α ] d x i + [ ∂ ϕ α ∂ u i k − u l α ∂ ρ l ∂ u i k ] d u i k + ( ∂ ϕ α ∂ u k − u l α ∂ ρ l ∂ u k ) θ k {\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}\left(\theta _{0}^{\alpha }\right)&={\mathcal {L}}_{V^{1}}\left(du^{\alpha }-u_{i}^{\alpha }dx^{i}\right)\\&={\mathcal {L}}_{V^{1}}du^{\alpha }-\left({\mathcal {L}}_{V^{1}}u_{i}^{\alpha }\right)dx^{i}-u_{i}^{\alpha }\left({\mathcal {L}}_{V^{1}}dx^{i}\right)\\&=d\left(V^{1}u^{\alpha }\right)-V^{1}u_{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d\left(V^{1}x^{i}\right)\\&=d\phi ^{\alpha }-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d\rho ^{i}\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}du^{k}+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }\left[{\frac {\partial \rho ^{i}}{\partial x^{m}}}dx^{m}+{\frac {\partial \rho ^{i}}{\partial u^{k}}}du^{k}+{\frac {\partial \rho ^{i}}{\partial u_{m}^{k}}}du_{m}^{k}\right]\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}\left(\theta ^{k}+u_{i}^{k}dx^{i}\right)+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{l}^{\alpha }\left[{\frac {\partial \rho ^{l}}{\partial x^{i}}}dx^{i}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}\left(\theta ^{k}+u_{i}^{k}dx^{i}\right)+{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}du_{i}^{k}\right]\\&=\left[{\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}u_{i}^{k}-u_{l}^{\alpha }\left({\frac {\partial \rho ^{l}}{\partial x^{i}}}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}u_{i}^{k}\right)-\chi _{i}^{\alpha }\right]dx^{i}+\left[{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}\right]du_{i}^{k}+\left({\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u^{k}}}\right)\theta ^{k}\end{aligned}}} ดังนั้นV 1 จะกำหนดการแปลงสัมผัสได้ก็ต่อเมื่อสัมประสิทธิ์ของdx i และในสูตรเป็นศูนย์เท่านั้น ข้อกำหนดหลังนี้บ่งบอกถึงเงื่อนไขการสัมผัส d u i k {\displaystyle du_{i}^{k}}
∂ ϕ α ∂ u i k − u l α ∂ ρ l ∂ u i k = 0 {\displaystyle {\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}=0} ข้อกำหนดก่อนหน้านี้ให้สูตรที่ชัดเจนสำหรับสัมประสิทธิ์ของพจน์อนุพันธ์อันดับแรกในV 1 :
χ i α = D ^ i ϕ α − u l α ( D ^ i ρ l ) {\displaystyle \chi _{i}^{\alpha }={\widehat {D}}_{i}\phi ^{\alpha }-u_{l}^{\alpha }\left({\widehat {D}}_{i}\rho ^{l}\right)} ที่ไหน
D ^ i = ∂ ∂ x i + u i k ∂ ∂ u k {\displaystyle {\widehat {D}}_{i}={\frac {\partial }{\partial x^{i}}}+u_{i}^{k}{\frac {\partial }{\partial u^{k}}}} หมาย ถึงการตัดทอนอันดับศูนย์ของอนุพันธ์รวมD i
ดังนั้น เงื่อนไขการสัมผัสจึงกำหนดการต่อขยายของจุดหรือสนามเวกเตอร์สัมผัสใดๆ อย่างเฉพาะเจาะจง กล่าวคือ ถ้าเป็นไปตามสมการเหล่านี้V r ที่ r ของ V ไปยังสนามเวกเตอร์บน J r (π L V r {\displaystyle {\mathcal {L}}_{V^{r}}}
ผลลัพธ์เหล่านี้จะเข้าใจได้ดีที่สุดเมื่อนำไปใช้กับตัวอย่างเฉพาะ ดังนั้น เรามาพิจารณาตัวอย่างต่อไปนี้กัน
ตัวอย่าง พิจารณากรณี(E, π, M) โดยที่E ≅ R 2 และM ≃ R จากนั้น(J 1 (π), π, E) จะกำหนดกลุ่มเจ็ทแรก และอาจประสานงานโดย(x, u, u 1 ) โดยที่
x ( j p 1 σ ) = x ( p ) = x u ( j p 1 σ ) = u ( σ ( p ) ) = u ( σ ( x ) ) = σ ( x ) u 1 ( j p 1 σ ) = ∂ σ ∂ x | p = σ ˙ ( x ) {\displaystyle {\begin{aligned}x(j_{p}^{1}\sigma )&=x(p)=x\\u(j_{p}^{1}\sigma )&=u(\sigma (p))=u(\sigma (x))=\sigma (x)\\u_{1}(j_{p}^{1}\sigma )&=\left.{\frac {\partial \sigma }{\partial x}}\right|_{p}={\dot {\sigma }}(x)\end{aligned}}} สำหรับทุกp ∈ M และσ ใน Γ p π ) รูปแบบการสัมผัสบนJ 1 (π) มีรูปแบบดังนี้
θ = d u − u 1 d x {\displaystyle \theta =du-u_{1}dx} พิจารณาเวกเตอร์V บนE ซึ่งมีรูปแบบดังนี้
V = x ∂ ∂ u − u ∂ ∂ x {\displaystyle V=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}} จากนั้น การขยายเวกเตอร์ฟิลด์นี้ครั้งแรกไปยังJ 1 (π) คือ
V 1 = V + Z = x ∂ ∂ u − u ∂ ∂ x + Z = x ∂ ∂ u − u ∂ ∂ x + ρ ( x , u , u 1 ) ∂ ∂ u 1 {\displaystyle {\begin{aligned}V^{1}&=V+Z\\&=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+Z\\&=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+\rho (x,u,u_{1}){\frac {\partial }{\partial u_{1}}}\end{aligned}}} ถ้าเราหาอนุพันธ์ลีของฟอร์มสัมผัสเทียบกับสนามเวกเตอร์ที่ขยายออกไปนี้เราจะได้ L V 1 ( θ ) , {\displaystyle {\mathcal {L}}_{V^{1}}(\theta ),}
L V 1 ( θ ) = L V 1 ( d u − u 1 d x ) = L V 1 d u − ( L V 1 u 1 ) d x − u 1 ( L V 1 d x ) = d ( V 1 u ) − V 1 u 1 d x − u 1 d ( V 1 x ) = d x − ρ ( x , u , u 1 ) d x + u 1 d u = ( 1 − ρ ( x , u , u 1 ) ) d x + u 1 d u = [ 1 − ρ ( x , u , u 1 ) ] d x + u 1 ( θ + u 1 d x ) d u = θ + u 1 d x = [ 1 + u 1 u 1 − ρ ( x , u , u 1 ) ] d x + u 1 θ {\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}(\theta )&={\mathcal {L}}_{V^{1}}(du-u_{1}dx)\\&={\mathcal {L}}_{V^{1}}du-\left({\mathcal {L}}_{V^{1}}u_{1}\right)dx-u_{1}\left({\mathcal {L}}_{V^{1}}dx\right)\\&=d\left(V^{1}u\right)-V^{1}u_{1}dx-u_{1}d\left(V^{1}x\right)\\&=dx-\rho (x,u,u_{1})dx+u_{1}du\\&=(1-\rho (x,u,u_{1}))dx+u_{1}du\\&=[1-\rho (x,u,u_{1})]dx+u_{1}(\theta +u_{1}dx)&&du=\theta +u_{1}dx\\&=[1+u_{1}u_{1}-\rho (x,u,u_{1})]dx+u_{1}\theta \end{aligned}}} ดังนั้น เพื่อรักษาสภาพการสัมผัสที่สมบูรณ์แบบ เราจึงจำเป็นต้อง...
1 + u 1 u 1 − ρ ( x , u , u 1 ) = 0 ⇔ ρ ( x , u , u 1 ) = 1 + u 1 u 1 . {\displaystyle 1+u_{1}u_{1}-\rho (x,u,u_{1})=0\quad \Leftrightarrow \quad \rho (x,u,u_{1})=1+u_{1}u_{1}.} ดังนั้นการขยายครั้งแรกของV ไปยังสนามเวกเตอร์บนJ 1 (π) คือ
V 1 = x ∂ ∂ u − u ∂ ∂ x + ( 1 + u 1 u 1 ) ∂ ∂ u 1 . {\displaystyle V^{1}=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+(1+u_{1}u_{1}){\frac {\partial }{\partial u_{1}}}.} เรามาคำนวณการต่อขยายครั้งที่สองของV ไปยังสนามเวกเตอร์บนJ 2 (π) กัน เรามีพิกัดบนJ 2 (π) เป็น ดังนั้น เวกเตอร์ที่ต่อขยายจะมีรูปแบบดังนี้ { x , u , u 1 , u 2 } {\displaystyle \{x,u,u_{1},u_{2}\}}
V 2 = x ∂ ∂ u − u ∂ ∂ x + ρ ( x , u , u 1 , u 2 ) ∂ ∂ u 1 + ϕ ( x , u , u 1 , u 2 ) ∂ ∂ u 2 . {\displaystyle V^{2}=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+\rho (x,u,u_{1},u_{2}){\frac {\partial }{\partial u_{1}}}+\phi (x,u,u_{1},u_{2}){\frac {\partial }{\partial u_{2}}}.} แบบฟอร์มติดต่อคือ
θ = d u − u 1 d x θ 1 = d u 1 − u 2 d x {\displaystyle {\begin{aligned}\theta &=du-u_{1}dx\\\theta _{1}&=du_{1}-u_{2}dx\end{aligned}}} เพื่อรักษาสภาพการสัมผัสที่เหมาะสม เราจึงจำเป็นต้อง...
L V 2 ( θ ) = 0 L V 2 ( θ 1 ) = 0 {\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{2}}(\theta )&=0\\{\mathcal {L}}_{V^{2}}(\theta _{1})&=0\end{aligned}}} ตอนนี้θ ไม่มี ส่วนเกี่ยวข้องกับ u 2 ดังนั้น จากสมการนี้ เราจะเลือกสูตรสำหรับρ ซึ่งจะได้ผลลัพธ์เดียวกันกับที่เราพบสำหรับV 1 ดังนั้น ปัญหาจึงคล้ายคลึงกับการขยายสนามเวกเตอร์V 1 ไปยังJ 2 (π) กล่าวคือ เราสามารถสร้าง การขยายครั้งที่ r ของสนามเวกเตอร์ได้โดยการใช้การอนุพันธ์แบบ Lie ของรูปแบบสัมผัสเทียบกับสนามเวกเตอร์ที่ขยายแล้วซ้ำๆ กันr ครั้ง ดังนั้น เราจึงมี
ρ ( x , u , u 1 ) = 1 + u 1 u 1 {\displaystyle \rho (x,u,u_{1})=1+u_{1}u_{1}} และดังนั้น
V 2 = V 1 + ϕ ( x , u , u 1 , u 2 ) ∂ ∂ u 2 = x ∂ ∂ u − u ∂ ∂ x + ( 1 + u 1 u 1 ) ∂ ∂ u 1 + ϕ ( x , u , u 1 , u 2 ) ∂ ∂ u 2 {\displaystyle {\begin{aligned}V^{2}&=V^{1}+\phi (x,u,u_{1},u_{2}){\frac {\partial }{\partial u_{2}}}\\&=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+(1+u_{1}u_{1}){\frac {\partial }{\partial u_{1}}}+\phi (x,u,u_{1},u_{2}){\frac {\partial }{\partial u_{2}}}\end{aligned}}} ดังนั้น อนุพันธ์ลีของรูปแบบสัมผัสที่สองเทียบกับV 2 คือ
L V 2 ( θ 1 ) = L V 2 ( d u 1 − u 2 d x ) = L V 2 d u 1 − ( L V 2 u 2 ) d x − u 2 ( L V 2 d x ) = d ( V 2 u 1 ) − V 2 u 2 d x − u 2 d ( V 2 x ) = d ( 1 + u 1 u 1 ) − ϕ ( x , u , u 1 , u 2 ) d x + u 2 d u = 2 u 1 d u 1 − ϕ ( x , u , u 1 , u 2 ) d x + u 2 d u = 2 u 1 d u 1 − ϕ ( x , u , u 1 , u 2 ) d x + u 2 ( θ + u 1 d x ) d u = θ + u 1 d x = 2 u 1 ( θ 1 + u 2 d x ) − ϕ ( x , u , u 1 , u 2 ) d x + u 2 ( θ + u 1 d x ) d u 1 = θ 1 + u 2 d x = [ 3 u 1 u 2 − ϕ ( x , u , u 1 , u 2 ) ] d x + u 2 θ + 2 u 1 θ 1 {\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{2}}(\theta _{1})&={\mathcal {L}}_{V^{2}}(du_{1}-u_{2}dx)\\&={\mathcal {L}}_{V^{2}}du_{1}-\left({\mathcal {L}}_{V^{2}}u_{2}\right)dx-u_{2}\left({\mathcal {L}}_{V^{2}}dx\right)\\&=d(V^{2}u_{1})-V^{2}u_{2}dx-u_{2}d(V^{2}x)\\&=d(1+u_{1}u_{1})-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du&=\theta +u_{1}dx\\&=2u_{1}(\theta _{1}+u_{2}dx)-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du_{1}&=\theta _{1}+u_{2}dx\\&=[3u_{1}u_{2}-\phi (x,u,u_{1},u_{2})]dx+u_{2}\theta +2u_{1}\theta _{1}\end{aligned}}} ดังนั้น เพื่อรักษาสภาพการสัมผัสที่เหมาะสม เราจึงจำเป็นต้อง... L V 2 ( θ 1 ) {\displaystyle {\mathcal {L}}_{V^{2}}(\theta _{1})}
3 u 1 u 2 − ϕ ( x , u , u 1 , u 2 ) = 0 ⇔ ϕ ( x , u , u 1 , u 2 ) = 3 u 1 u 2 . {\displaystyle 3u_{1}u_{2}-\phi (x,u,u_{1},u_{2})=0\quad \Leftrightarrow \quad \phi (x,u,u_{1},u_{2})=3u_{1}u_{2}.} ดังนั้นการขยายครั้งที่สองของV ไปยังสนามเวกเตอร์บนJ 2 (π) คือ
V 2 = x ∂ ∂ u − u ∂ ∂ x + ( 1 + u 1 u 1 ) ∂ ∂ u 1 + 3 u 1 u 2 ∂ ∂ u 2 . {\displaystyle V^{2}=x{\frac {\partial }{\partial u}}-u{\frac {\partial }{\partial x}}+(1+u_{1}u_{1}){\frac {\partial }{\partial u_{1}}}+3u_{1}u_{2}{\frac {\partial }{\partial u_{2}}}.} โปรดทราบว่าส่วนขยายแรกของV สามารถกู้คืนได้โดยการละเว้นพจน์อนุพันธ์อันดับสองในV 2 หรือโดยการฉายกลับไปยังJ 1 (π )
พื้นที่เจ็ตอันไร้ขอบเขต ลิมิตผกผัน ของลำดับการฉายภาพก่อให้เกิดปริภูมิเจ็ทอนันต์ J ∞ (π) จุดหนึ่งคือชั้นสมมูลของส่วนตัดของ π ที่มีk- เจ็ทเดียวกันในp เหมือนกับ σ สำหรับทุกค่าของk การฉายภาพตามธรรมชาติ π ∞ แมปไปยัง p π k + 1 , k : J k + 1 ( π ) → J k ( π ) {\displaystyle \pi _{k+1,k}:J^{k+1}(\pi )\to J^{k}(\pi )} j p ∞ ( σ ) {\displaystyle j_{p}^{\infty }(\sigma )} j p ∞ ( σ ) {\displaystyle j_{p}^{\infty }(\sigma )}
เพียงแค่คิดในแง่ของพิกัดJ ∞ (π) ก็ดูเหมือนจะเป็นวัตถุทางเรขาคณิตที่มีมิติอนันต์ อันที่จริง วิธีที่ง่ายที่สุดในการแนะนำโครงสร้างที่หาอนุพันธ์ได้บนJ ∞ (π) โดยไม่ต้องอาศัยแผนภูมิที่หาอนุพันธ์ได้ คือแคลคูลัสเชิงอนุพันธ์เหนือพีชคณิตสลับที่ ลำดับคู่ขนานกับลำดับของการฉายภาพของแมนิโฟลด์คือลำดับของการฉีดของพีชคณิตสลับที่ ให้เราใช้สัญลักษณ์ง่ายๆ ว่าตอนนี้พิจารณาลิมิตโดยตรง ของมันจะเป็นพีชคณิตสลับที่ ซึ่งสามารถสมมติได้ว่าเป็นพีชคณิตฟังก์ชันเรียบเหนือวัตถุทางเรขาคณิตJ ∞ (π) สังเกตว่า ซึ่งเกิดมาเป็นลิมิตโดยตรง จึงมีโครงสร้างเพิ่มเติม: มันคือพีชคณิตสลับที่แบบกรอง π k + 1 , k : J k + 1 ( π ) → J k ( π ) {\displaystyle \pi _{k+1,k}:J^{k+1}(\pi )\to J^{k}(\pi )} π k + 1 , k ∗ : C ∞ ( J k ( π ) ) → C ∞ ( J k + 1 ( π ) ) {\displaystyle \pi _{k+1,k}^{*}:C^{\infty }(J^{k}(\pi ))\to C^{\infty }\left(J^{k+1}(\pi )\right)} C ∞ ( J k ( π ) ) {\displaystyle C^{\infty }(J^{k}(\pi ))} F k ( π ) {\displaystyle {\mathcal {F}}_{k}(\pi )} F ( π ) {\displaystyle {\mathcal {F}}(\pi )} F k ( π ) {\displaystyle {\mathcal {F}}_{k}(\pi )} F ( π ) {\displaystyle {\mathcal {F}}(\pi )}
โดยคร่าวๆ แล้ว องค์ประกอบที่เป็นรูปธรรมจะอยู่ใน เสมอดังนั้นจึงเป็นฟังก์ชันเรียบบนแมนิโฟลด์มิติจำกัดJ k φ ∈ F ( π ) {\displaystyle \varphi \in {\mathcal {F}}(\pi )} F k ( π ) {\displaystyle {\mathcal {F}}_{k}(\pi )}
สมการอนุพันธ์ย่อยที่ยืดเยื้ออย่างไม่มีที่สิ้นสุด เมื่อกำหนดระบบสมการเชิงอนุพันธ์ย่อยอันดับที่k E ⊆ J k (π) แล้ว ชุดI(E) ของฟังก์ชันเรียบที่หายไปบนE บนJ ∞ (π) จะเป็นไอเดียล ในพีชคณิตและด้วยเหตุนี้จึงเป็นไอเดียลในลิมิตโดยตรงด้วย F k ( π ) {\displaystyle {\mathcal {F}}_{k}(\pi )} F ( π ) {\displaystyle {\mathcal {F}}(\pi )}
ปรับปรุงI(E) โดยการเพิ่มองค์ประกอบที่เป็นไปได้ทั้งหมดของอนุพันธ์รวม ที่ใช้กับองค์ประกอบทั้งหมด ด้วยวิธีนี้เราจะได้ไอเดียลใหม่I ซึ่งตอนนี้ปิดภายใต้การดำเนินการของการหาอนุพันธ์รวม ส่วนย่อยE ( ∞) ของJ ∞ (π) ที่ถูกตัดออกโดยI เรียกว่าส่วนขยายอนันต์ ของE F ( π ) {\displaystyle {\mathcal {F}}(\pi )}
ในทางเรขาคณิตE (∞) คือแมนิโฟลด์ของผลเฉลยเชิงรูปธรรม ของE จุดหนึ่งในE (∞) สามารถมองเห็นได้อย่างง่ายดายว่าแทนด้วยส่วนตัด σ ซึ่ง กราฟของ k -jet สัมผัสกับE ที่จุดนั้นด้วยลำดับการสัมผัสที่สูงตามอำเภอใจ j p ∞ ( σ ) {\displaystyle j_{p}^{\infty }(\sigma )} j p k ( σ ) {\displaystyle j_{p}^{k}(\sigma )}
ในเชิงวิเคราะห์ หากE กำหนดโดย φ = 0 คำตอบเชิงรูปแบบสามารถเข้าใจได้ว่าเป็นเซตของสัมประสิทธิ์เทย์เลอร์ของส่วน σ ที่จุดp ซึ่งทำให้ค่าอนุกรมเทย์เลอร์ ของที่จุดp เป็น ศูนย์ φ ∘ j k ( σ ) {\displaystyle \varphi \circ j^{k}(\sigma )}
ที่สำคัญที่สุด คุณสมบัติการปิดของI บ่งชี้ว่าE (∞) สัมผัสกับโครงสร้างสัมผัสลำดับอนันต์ บนJ ∞ (π) ดังนั้นโดยการจำกัดที่E (∞) จะได้ค่า diffiety และสามารถศึกษาลำดับ Vinogradov (C-spectral) ที่เกี่ยวข้อง ได้ C {\displaystyle {\mathcal {C}}} C {\displaystyle {\mathcal {C}}} ( E ( ∞ ) , C | E ( ∞ ) ) {\displaystyle (E_{(\infty )},{\mathcal {C}}|_{E_{(\infty )}})}
บทความนี้ได้นิยามเจ็ตของส่วนตัดเฉพาะที่ของบันเดิล แต่ก็เป็นไปได้ที่จะนิยามเจ็ตของฟังก์ชันf: M → N โดยที่M และN เป็นแมนิโฟลด์ เจ็ตของf ก็จะสอดคล้องกับเจ็ตของส่วนตัดนั้น
gr f : M → M × N gr f (p) = (p, f(p)) ( gr f เป็นที่รู้จักกันในชื่อกราฟของฟังก์ชันf ) ของกลุ่มย่อยที่ไม่สำคัญ ( M × N , π 1 , M ) อย่างไรก็ตาม ข้อจำกัดนี้ไม่ได้ทำให้ทฤษฎีง่ายขึ้น เนื่องจากความเป็นไม่สำคัญทั่วโลกของ π ไม่ได้หมายความถึงความเป็นไม่สำคัญทั่วโลก ของ π 1
ดูเพิ่มเติม
อ่านเพิ่มเติม เอห์เรสมันน์ ซี. "บทนำ à la théorie des โครงสร้าง infinitésimales และ des pseudo-groupes de Lie" เรขาคณิตดิฟเฟอเรนเทียล, Colloq อินเตอร์. ดูเซ็นเตอร์แนท. เดอลา Recherche Scientifique, Strasbourg, 1953, 97-127 Kolář, I., Michor, P., Slovák, J., การดำเนินการตามธรรมชาติในเรขาคณิตเชิงอนุพันธ์. Springer-Verlag: Berlin Heidelberg, 1993. ISBN 3-540-56235-4 , ISBN 0-387-56235-4 . Saunders, DJ, "The Geometry of Jet Bundles", Cambridge University Press, 1989, ISBN 0-521-36948-7 Krasil'shchik, IS, Vinogradov, AM, [และคณะ], "สมมาตรและกฎการอนุรักษ์สำหรับสมการเชิงอนุพันธ์ของฟิสิกส์คณิตศาสตร์", สมาคมคณิตศาสตร์อเมริกัน, พรอวิเดนซ์, โรดไอแลนด์, 1999, ISBN 0-8218-0958-X . Olver, PJ , "Equivalence, Invariants and Symmetry", Cambridge University Press, 1995, ISBN 0-521-47811-1



















































![{\displaystyle {\begin{aligned}\left(j_{p}^{1}\sigma \right)^{*}\theta &=\theta \circ j_{p}^{1}\sigma \\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))d(\sigma (x))+c(x,\sigma (x),\sigma '(x))d(\sigma '(x))\\&=a(x,\sigma (x),\sigma '(x))dx+b(x,\sigma (x),\sigma '(x))\sigma '(x)dx+c(x,\sigma (x),\sigma '(x))\sigma ''(x)dx\\&=[a(x,\sigma (x),\sigma '(x))+b(x,\sigma (x),\sigma '(x))\sigma '(x)+c(x,\sigma (x),\sigma '(x))\sigma ''(x)]dx\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/30a959d2fa3a6248866a919b98d607dea8e76829)


![{\displaystyle {\begin{aligned}\left(j_{p}^{2}\sigma \right)^{*}\theta &=\theta \circ j_{p}^{2}\sigma \\&=a(x,\sigma (x),\sigma '(x),\sigma ''(x))dx+b(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma (x))+{}\\&\qquad \qquad c(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma '(x))+e(x,\sigma (x),\sigma '(x),\sigma ''(x))d(\sigma ''(x))\\&=adx+b\sigma '(x)dx+c\sigma ''(x)dx+e\sigma '''(x)dx\\&=[a+b\sigma '(x)+c\sigma ''(x)+e\sigma '''(x)]dx\\&=0\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/11dfc307319b49dd700c8bf6df06a16de4993719)


































![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}\left(\theta _{0}^{\alpha }\right)&={\mathcal {L}}_{V^{1}}\left(du^{\alpha }-u_{i}^{\alpha }dx^{i}\right)\\&={\mathcal {L}}_{V^{1}}du^{\alpha }-\left({\mathcal {L}}_{V^{1}}u_{i}^{\alpha }\right)dx^{i}-u_{i}^{\alpha }\left({\mathcal {L}}_{V^{1}}dx^{i}\right)\\&=d\left(V^{1}u^{\alpha }\right)-V^{1}u_{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d\left(V^{1}x^{i}\right)\\&=d\phi ^{\alpha }-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }d\rho ^{i}\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}du^{k}+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{i}^{\alpha }\left[{\frac {\partial \rho ^{i}}{\partial x^{m}}}dx^{m}+{\frac {\partial \rho ^{i}}{\partial u^{k}}}du^{k}+{\frac {\partial \rho ^{i}}{\partial u_{m}^{k}}}du_{m}^{k}\right]\\&={\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}dx^{i}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}\left(\theta ^{k}+u_{i}^{k}dx^{i}\right)+{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}du_{i}^{k}-\chi _{i}^{\alpha }dx^{i}-u_{l}^{\alpha }\left[{\frac {\partial \rho ^{l}}{\partial x^{i}}}dx^{i}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}\left(\theta ^{k}+u_{i}^{k}dx^{i}\right)+{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}du_{i}^{k}\right]\\&=\left[{\frac {\partial \phi ^{\alpha }}{\partial x^{i}}}+{\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}u_{i}^{k}-u_{l}^{\alpha }\left({\frac {\partial \rho ^{l}}{\partial x^{i}}}+{\frac {\partial \rho ^{l}}{\partial u^{k}}}u_{i}^{k}\right)-\chi _{i}^{\alpha }\right]dx^{i}+\left[{\frac {\partial \phi ^{\alpha }}{\partial u_{i}^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u_{i}^{k}}}\right]du_{i}^{k}+\left({\frac {\partial \phi ^{\alpha }}{\partial u^{k}}}-u_{l}^{\alpha }{\frac {\partial \rho ^{l}}{\partial u^{k}}}\right)\theta ^{k}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0151abaeb6a895d4256232079c3335749fb77ea7)










![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{1}}(\theta )&={\mathcal {L}}_{V^{1}}(du-u_{1}dx)\\&={\mathcal {L}}_{V^{1}}du-\left({\mathcal {L}}_{V^{1}}u_{1}\right)dx-u_{1}\left({\mathcal {L}}_{V^{1}}dx\right)\\&=d\left(V^{1}u\right)-V^{1}u_{1}dx-u_{1}d\left(V^{1}x\right)\\&=dx-\rho (x,u,u_{1})dx+u_{1}du\\&=(1-\rho (x,u,u_{1}))dx+u_{1}du\\&=[1-\rho (x,u,u_{1})]dx+u_{1}(\theta +u_{1}dx)&&du=\theta +u_{1}dx\\&=[1+u_{1}u_{1}-\rho (x,u,u_{1})]dx+u_{1}\theta \end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/73ccafd43ff5860a459d84a5765ab7982ff42a0f)








![{\displaystyle {\begin{aligned}{\mathcal {L}}_{V^{2}}(\theta _{1})&={\mathcal {L}}_{V^{2}}(du_{1}-u_{2}dx)\\&={\mathcal {L}}_{V^{2}}du_{1}-\left({\mathcal {L}}_{V^{2}}u_{2}\right)dx-u_{2}\left({\mathcal {L}}_{V^{2}}dx\right)\\&=d(V^{2}u_{1})-V^{2}u_{2}dx-u_{2}d(V^{2}x)\\&=d(1+u_{1}u_{1})-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}du\\&=2u_{1}du_{1}-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du&=\theta +u_{1}dx\\&=2u_{1}(\theta _{1}+u_{2}dx)-\phi (x,u,u_{1},u_{2})dx+u_{2}(\theta +u_{1}dx)&du_{1}&=\theta _{1}+u_{2}dx\\&=[3u_{1}u_{2}-\phi (x,u,u_{1},u_{2})]dx+u_{2}\theta +2u_{1}\theta _{1}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78252b9150284f554d25bad58168a88c161a3b05)













