อ่าน 32 นาที
สูตรการหมุนในสามมิติ
ในเรขาคณิตมีสูตรต่างๆ มากมายที่ใช้ในการแสดงการหมุนในสามมิติ ในรูปของ การแปลงทางคณิตศาสตร์ในฟิสิกส์ แนวคิดนี้ถูกนำไปประยุกต์ใช้กับกลศาสตร์คลาสสิก โดยที่ จลนศาสตร์การหมุน...
สูตรการหมุนในสามมิติ
ในเรขาคณิตมีสูตรต่างๆ มากมายที่ใช้ในการแสดงการหมุนในสามมิติ ในรูปของ การแปลงทางคณิตศาสตร์ในฟิสิกส์ แนวคิดนี้ถูกนำไปประยุกต์ใช้กับกลศาสตร์คลาสสิก โดยที่ จลนศาสตร์การหมุน (หรือจลนศาสตร์เชิงมุม) คือวิทยาศาสตร์ของ การอธิบาย เชิงปริมาณ ของ การเคลื่อนที่แบบหมุนอย่างเดียวการวางตัวของวัตถุ ณ เวลาใดเวลาหนึ่งจะถูกอธิบายด้วยเครื่องมือเดียวกัน เนื่องจากมันถูกกำหนดให้เป็นการหมุนในจินตนาการจากตำแหน่งอ้างอิงในอวกาศ มากกว่าการหมุนที่สังเกตได้จริงจากตำแหน่งก่อนหน้าในอวกาศ
ตามทฤษฎีบทการหมุนของออยเลอร์การหมุนของวัตถุแข็งเกร็ง (หรือ ระบบพิกัดสามมิติที่มีจุด กำเนิดคงที่ ) อธิบายได้ด้วยการหมุนเพียงครั้งเดียวรอบแกนใดแกนหนึ่ง การหมุนดังกล่าวสามารถอธิบายได้อย่างไม่ซ้ำกันด้วย พารามิเตอร์ จริง อย่างน้อยสามตัว อย่างไรก็ตาม ด้วยเหตุผลหลายประการ จึงมีหลายวิธีในการแสดงการหมุนนั้น วิธีการแสดงเหล่านี้หลายวิธีใช้พารามิเตอร์มากกว่าสามตัวที่จำเป็น แม้ว่าแต่ละวิธีจะมีเพียงสามองศาอิสระก็ตาม
ตัวอย่างหนึ่งของการใช้การแสดงผลแบบหมุนคือในด้านคอมพิวเตอร์วิชั่นซึ่ง ผู้สังเกตการณ์ อัตโนมัติจำเป็นต้องติดตามเป้าหมาย พิจารณาวัตถุแข็งเกร็งที่มีเวกเตอร์หน่วยตั้งฉาก สามตัว ยึดติดกับตัววัตถุ (ซึ่งแสดงถึงแกนทั้งสามของระบบพิกัด ท้องถิ่นของวัตถุ ) ปัญหาพื้นฐานคือการระบุทิศทางของเวกเตอร์หน่วย ทั้งสามนี้ และด้วยเหตุนี้จึงระบุทิศทางของวัตถุแข็งเกร็งเมื่อเทียบกับระบบพิกัดของผู้สังเกตการณ์ ซึ่งถือเป็นตำแหน่งอ้างอิงในอวกาศ
การหมุนและการเคลื่อนที่
การกำหนดสูตรการหมุนมุ่งเน้นไปที่การเคลื่อนที่ที่เหมาะสม ( รักษาทิศทาง ) ในปริภูมิยูคลิดที่มีจุดคงที่จุดหนึ่งซึ่งการหมุน นั้น อ้างอิงถึงจุดนั้น แม้ว่าการเคลื่อนที่ทางกายภาพที่มีจุดคงที่จะเป็นกรณีสำคัญ (เช่น การเคลื่อนที่ที่อธิบายในกรอบอ้างอิงศูนย์กลางมวลหรือการเคลื่อนที่ของข้อต่อ ) แต่แนวทางนี้สร้างความรู้เกี่ยวกับการเคลื่อนที่ทั้งหมดการเคลื่อนที่ที่เหมาะสม ใดๆ ในปริภูมิยูคลิดจะแยกออกเป็นการหมุนรอบจุดกำเนิดและการเลื่อนไม่ว่าลำดับของการประกอบจะเป็นอย่างไร ส่วนประกอบของการหมุน "บริสุทธิ์" จะไม่เปลี่ยนแปลง โดยถูกกำหนดอย่างเฉพาะเจาะจงโดยการเคลื่อนที่ทั้งหมด
เราสามารถเข้าใจการหมุน "บริสุทธิ์" ได้ว่าเป็นแผนที่เชิงเส้นในปริภูมิเวกเตอร์ที่มีโครงสร้างแบบยุคลิด ไม่ใช่เป็นแผนที่ของจุดในปริภูมิเชิงเส้น ที่สอดคล้องกัน กล่าวอีกนัยหนึ่ง สูตรการหมุนจะจับเฉพาะส่วนของการหมุนของการเคลื่อนที่ ซึ่งมีสามองศาอิสระ และละเลยส่วนของการเลื่อน ซึ่งมีอีกสามองศาอิสระ
เมื่อแสดงการหมุนเป็นตัวเลขในคอมพิวเตอร์ บางคนชอบการแสดงแบบควอเทอร์เนียนหรือการแสดงแบบแกน+มุม เพราะจะช่วยหลีกเลี่ยงการล็อกแกนหมุนที่อาจเกิดขึ้นกับการหมุนแบบออยเลอร์[ 1 ]
ทางเลือกอื่นๆ
เมทริกซ์การหมุน
กลุ่ม เวกเตอร์หน่วยสามตัวที่กล่าวถึงข้างต้นเรียกว่าฐาน (basis ) การระบุพิกัด ( ส่วนประกอบ ) ของเวกเตอร์ในฐานนี้ ณ ตำแหน่งปัจจุบัน (ที่หมุนแล้ว) ในแง่ของแกนพิกัดอ้างอิง (ที่ไม่หมุน) จะอธิบายการหมุนได้อย่างสมบูรณ์ เวกเตอร์หน่วยสามตัวû , v̂และŵที่ประกอบเป็นฐานที่หมุนแล้วแต่ละตัวประกอบด้วย 3 พิกัด ทำให้มีพารามิเตอร์ทั้งหมด 9 ตัว
พารามิเตอร์เหล่านี้สามารถเขียนได้เป็นองค์ประกอบของเมทริกซ์3 × 3 Aซึ่งเรียกว่าเมทริกซ์การหมุนโดยทั่วไป พิกัดของเวกเตอร์แต่ละตัวจะถูกจัดเรียงตามคอลัมน์ของเมทริกซ์ (อย่างไรก็ตาม โปรดระวังว่ายังมีคำจำกัดความอื่นของเมทริกซ์การหมุนที่ใช้กันอย่างแพร่หลาย ซึ่งพิกัดของเวกเตอร์ที่กำหนดไว้ข้างต้นจะถูกจัดเรียงตามแถว[ 2 ] )

องค์ประกอบของเมทริกซ์การหมุนไม่ได้เป็นอิสระต่อกันทั้งหมด—ตามทฤษฎีบทการหมุนของออยเลอร์ เมทริกซ์การหมุนมีองศาอิสระเพียงสามองศาเท่านั้น
เมทริกซ์การหมุนมีคุณสมบัติดังต่อไปนี้:
- Aคือเมทริกซ์จริงเชิงตั้งฉากดังนั้นแต่ละแถวหรือแต่ละคอลัมน์ของเมทริกซ์นี้จึงแทนเตอร์หน่วย
- ค่าไอเกนของ เมทริก ซ์ Aคือโดยที่iคือหน่วยจินตนาการ มาตรฐาน ที่มีคุณสมบัติi 2 = −1
- ค่าดีเทอร์มิแนนต์ของเมท ริก ซ์ Aคือ +1 ซึ่งเทียบเท่ากับผลคูณของค่าไอเกนของเมทริกซ์ A
- ผลรวมของค่าร่องรอย (trace)ของ เมทริก ซ์ Aคือ1 + 2 cos θซึ่งเทียบเท่ากับผลรวมของค่าลักษณะเฉพาะ (eigenvalues) ของเมทริกซ์ A

มุมθที่ปรากฏในนิพจน์ค่าลักษณะเฉพาะนั้น สอดคล้องกับมุมของแกนออยเลอร์และการแสดงมุม เวกเตอร์ลักษณะเฉพาะที่สอดคล้องกับค่าลักษณะเฉพาะเท่ากับ 1 คือแกนออยเลอร์ เนื่องจากแกนนี้เป็นเวกเตอร์เดียว (ที่ไม่เป็นศูนย์) ที่ยังคงไม่เปลี่ยนแปลงเมื่อคูณทางซ้าย (หมุน) ด้วยเมทริกซ์การหมุน
คุณสมบัติข้างต้นเทียบเท่ากับ ซึ่งเป็นอีกวิธีหนึ่งในการกล่าวว่า( û , v̂ , ŵ )ก่อให้เกิดฐานออร์โทนอร์มอล 3 มิติ ข้อความเหล่านี้ประกอบด้วยเงื่อนไขทั้งหมด 6 ข้อ (ผลคูณไขว้มี 3 ข้อ) ทำให้เมทริกซ์การหมุนมีองศาอิสระเพียง 3 องศาตามที่ต้องการ

การหมุนสองครั้งติดต่อกันซึ่งแสดงด้วยเมทริกซ์A 1และA 2สามารถรวมกันได้อย่างง่ายดายในฐานะองค์ประกอบของกลุ่ม (โปรดสังเกตลำดับ เนื่องจากเวกเตอร์ที่กำลังหมุนจะถูกคูณจากด้านขวา)

ความง่ายในการหมุนเวกเตอร์โดยใช้เมทริกซ์การหมุน รวมถึงความง่ายในการรวมการหมุนต่อเนื่องกัน ทำให้เมทริกซ์การหมุนเป็นวิธีที่มีประโยชน์และเป็นที่นิยมในการแสดงการหมุน แม้ว่าจะกระชับน้อยกว่าการแสดงแบบอื่นก็ตาม
แกนและมุมของออยเลอร์ (เวกเตอร์การหมุน)

จากทฤษฎีบทการหมุนของออยเลอร์เราทราบว่าการหมุนใดๆ สามารถแสดงได้ในรูปการหมุนเพียงครั้งเดียวรอบแกนใดแกนหนึ่ง แกนนั้นคือเวกเตอร์หน่วย (มีเอกลักษณ์เฉพาะตัว ยกเว้นเครื่องหมาย) ซึ่งไม่เปลี่ยนแปลงไปจากการหมุน ขนาดของมุมก็มีเอกลักษณ์เฉพาะตัวเช่นกัน โดยเครื่องหมายของมุมจะถูกกำหนดโดยเครื่องหมายของแกนการหมุน
แกนสามารถแสดงได้ด้วย เวกเตอร์หน่วย สามมิติ และมุมสามารถแสดงได้ด้วยค่าสเกลาร์ θ

เนื่องจากแกนถูกทำให้เป็นแกนมาตรฐานแล้ว จึงมีเพียงสององศาอิสระเท่านั้น มุมจะเพิ่มองศาอิสระที่สามให้กับการแสดงการหมุนนี้
เราอาจต้องการแสดงการหมุนในรูปของเวกเตอร์การหมุนหรือเวกเตอร์ออยเลอร์ซึ่ง เป็นเวกเตอร์สามมิติที่ไม่ได้รับการทำให้เป็นเวกเตอร์หน่วย โดยทิศทางของเวกเตอร์จะระบุแกน และความยาวคือθ

เวกเตอร์การหมุนมีประโยชน์ในบางบริบท เนื่องจากมันแสดงถึงการหมุนสามมิติด้วย ค่า สเกลาร์ เพียงสาม ค่า (ส่วนประกอบของมัน) ซึ่งแสดงถึงองศาอิสระทั้งสาม เช่นเดียวกับการแสดงผลโดยใช้ลำดับของมุมออยเลอร์สามมุม (ดูด้านล่าง)
ถ้ามุมการหมุนθเป็นศูนย์ แกนจะไม่สามารถกำหนดได้อย่างเฉพาะเจาะจง การรวมการหมุนสองครั้งที่ต่อเนื่องกัน โดยแต่ละครั้งแทนด้วยแกนและมุมออยเลอร์นั้นไม่ใช่เรื่องง่าย และในความเป็นจริงแล้วไม่เป็นไปตามกฎการบวกเวกเตอร์ ซึ่งแสดงให้เห็นว่าการหมุนแบบจำกัดนั้นไม่ใช่เวกเตอร์อย่างแท้จริง วิธีที่ดีที่สุดคือการใช้เมทริกซ์การหมุนหรือสัญกรณ์ควอเทอร์เนียน คำนวณผลคูณ แล้วแปลงกลับเป็นแกนและมุมออยเลอร์
การหมุนแบบออยเลอร์
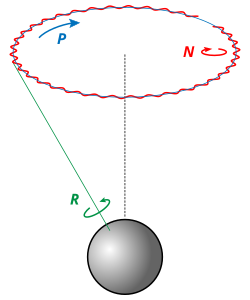
แนวคิดเบื้องหลังการหมุนแบบออยเลอร์คือการแบ่งการหมุนทั้งหมดของระบบพิกัดออกเป็นการหมุนเชิงโครงสร้างที่ง่ายกว่าสามแบบ เรียกว่า การหมุนควง (precession) การหมุนรอบแกน ( nutation ) และการหมุนภายใน (intrinsic rotation ) โดยแต่ละแบบเป็นการเพิ่มค่าบนมุมออยเลอร์มุมใดมุมหนึ่ง สังเกตว่าเมทริกซ์ภายนอกจะแสดงถึงการหมุนรอบแกนหนึ่งของกรอบอ้างอิง และเมทริกซ์ภายในจะแสดงถึงการหมุนรอบแกนหนึ่งของกรอบเคลื่อนที่ ส่วนเมทริกซ์ตรงกลางจะแสดงถึงการหมุนรอบแกนกลางที่เรียกว่า เส้นของจุดตัด (line of nodes )
อย่างไรก็ตาม นิยามของมุมออยเลอร์นั้นไม่เป็นเอกลักษณ์ และในเอกสารทางวิชาการมีการใช้แบบแผนที่แตกต่างกันมากมาย แบบแผนเหล่านี้ขึ้นอยู่กับแกนที่ใช้ในการหมุน และลำดับของการหมุน (เนื่องจากการหมุนบนทรงกลมนั้นไม่สามารถสลับที่ได้ )
โดยทั่วไปแล้ว รูปแบบที่ใช้จะระบุโดยการกำหนดแกนที่การหมุนต่อเนื่อง (ก่อนที่จะนำมาประกอบกัน) เกิดขึ้น โดยอ้างอิงด้วยดัชนี(1, 2, 3)หรือตัวอักษร(X, Y, Z)ในวงการวิศวกรรมและหุ่นยนต์มักใช้มุมออยเลอร์แบบ 3-1-3 โปรดสังเกตว่าหลังจากประกอบการหมุนอิสระแล้ว การหมุนเหล่านั้นจะไม่หมุนรอบแกนของตัวเองอีกต่อไป เมทริกซ์ภายนอกสุดจะหมุนเมทริกซ์อีกสองตัว ทำให้เมทริกซ์การหมุนตัวที่สองอยู่เหนือเส้นของโหนด และเมทริกซ์ตัวที่สามอยู่ในเฟรมที่เคลื่อนที่ไปพร้อมกับตัววัตถุ มี ชุดค่าผสมที่เป็นไปได้ 3 × 3 × 3 = 27ชุดของการหมุนพื้นฐานสามแบบ แต่มีเพียง3 × 2 × 2 = 12ชุดเท่านั้นที่สามารถใช้แทนการหมุน 3 มิติแบบใดก็ได้ในรูปของมุมออยเลอร์ ชุดค่าผสมทั้ง 12 แบบนี้จะหลีกเลี่ยงการหมุนต่อเนื่องรอบแกนเดียวกัน (เช่น XXY) ซึ่งจะลดจำนวนองศาอิสระที่สามารถแสดงได้
ดังนั้น มุมออยเลอร์จึงไม่เคยถูกแสดงในรูปของกรอบอ้างอิงภายนอก หรือในรูปของกรอบอ้างอิงของวัตถุที่หมุนไปพร้อมกัน แต่จะแสดงในรูปแบบผสมผสาน จึงมีการใช้สัญลักษณ์อื่นๆ (เช่นเมทริกซ์การหมุนหรือควอเทอร์เนียน ) เพื่อหลีกเลี่ยงปัญหานี้
ในด้านการบินทิศทางของอากาศยานมักแสดงด้วยมุมTait-Bryanตาม แบบแผน z - y ′- x ″ซึ่งเรียกว่าทิศทาง (heading) , ระดับความสูง (elevation ) และมุมเอียง (bank) (หรือในความหมายเดียวกันคือ มุมหัน ( yaw ) , มุมเงย (pitch ) และมุมเอียง (roll ) )
ควอเทอร์เนียน
ควอเทอร์เนียน ซึ่งเป็นปริภูมิ เวกเตอร์สี่มิติได้พิสูจน์แล้วว่ามีประโยชน์อย่างมากในการแสดงการหมุน เนื่องจากมีข้อดีหลายประการเหนือกว่าการแสดงแบบอื่น ๆ ที่กล่าวถึงในบทความนี้
การแสดงผลการหมุนด้วยควอเทอร์เนียนเขียนได้เป็นเวอร์เซอร์ (ควอเทอร์เนียนแบบนอร์มาไลซ์):

คำจำกัดความข้างต้นจัดเก็บควอเทอร์เนียนเป็นอาร์เรย์ตามแบบแผนที่ใช้ใน (Wertz 1980) และ (Markley 2003) คำจำกัดความทางเลือกอื่น ซึ่งใช้ใน (Coutsias 1999) และ (Schmidt 2001) เป็นต้น กำหนดให้เทอม "สเกลาร์" เป็นองค์ประกอบแรกของควอเทอร์เนียน โดยที่องค์ประกอบอื่นๆ เลื่อนลงมาหนึ่งตำแหน่ง
ในแง่ของแกนออยเลอร์
และมุมθส่วนประกอบของเวอร์เซอร์นี้แสดงได้ดังนี้:

จากการตรวจสอบพบว่า การกำหนดพารามิเตอร์ควอเทอร์เนียนเป็นไปตามข้อจำกัดดังต่อไปนี้:

พจน์สุดท้าย (ในคำจำกัดความของเรา) มักเรียกว่าพจน์สเกลาร์ ซึ่งมีที่มาจากควอเทอร์เนียนเมื่อเข้าใจว่าเป็นส่วนขยายทางคณิตศาสตร์ของจำนวนเชิงซ้อน เขียนได้เป็น และ โดยที่{ i , j , k }คือจำนวนไฮเปอร์คอมเพล็กซ์ที่สอดคล้องกับ


การคูณควอเทอร์เนียน ซึ่งใช้ในการระบุ การหมุน เชิงประกอบจะดำเนินการในลักษณะเดียวกับการคูณจำนวนเชิงซ้อนยกเว้นว่าต้องคำนึงถึงลำดับขององค์ประกอบ เนื่องจาก1การคูณไม่เป็นไปตามสมบัติการสลับที่ ในสัญกรณ์เมทริกซ์ เราสามารถเขียนการคูณควอเทอร์เนียนได้ดังนี้

ดังนั้น การรวมการหมุนควอเทอร์เนียนสองครั้งที่ต่อเนื่องกันจึงง่ายเหมือนกับการใช้เมทริกซ์การหมุน เช่นเดียวกับการรวม เมทริกซ์การหมุนสองครั้งที่ต่อเนื่องกัน A 1ตามด้วยA 2 ซึ่ง เราสามารถแสดงสิ่งนี้ด้วยพารามิเตอร์ควอเทอร์เนียนในลักษณะที่กระชับเช่นเดียวกัน:


ควอเทอร์เนียนเป็นรูปแบบการกำหนดพารามิเตอร์ที่ได้รับความนิยมอย่างมากเนื่องจากมีคุณสมบัติดังต่อไปนี้:
- มีขนาดกะทัดรัดกว่าการแสดงผลในรูปแบบเมทริกซ์และมีโอกาสเกิดข้อผิดพลาดจากการปัดเศษ น้อยกว่า
- การแสดงเมทริกซ์การหมุนในรูปของพารามิเตอร์ควอเทอร์เนียนไม่เกี่ยวข้องกับฟังก์ชันตรีโกณมิติ ใดๆ
- การรวมการหมุนสองแบบที่แสดงในรูปควอเทอร์เนียนเข้าด้วยกันโดยใช้ผลคูณควอเทอร์เนียนนั้นทำได้ง่าย
เช่นเดียวกับเมทริกซ์การหมุน ควอเทอร์เนียนบางครั้งก็ต้องได้รับการปรับขนาดใหม่เนื่องจากข้อผิดพลาดในการปัดเศษ เพื่อให้แน่ใจว่าสอดคล้องกับการหมุนที่ถูกต้อง อย่างไรก็ตาม ต้นทุนการคำนวณในการปรับขนาดควอเทอร์เนียนนั้นน้อยกว่าการปรับขนาดเมทริกซ์ 3 × 3 มาก
ควอเทอร์เนียนยังจับลักษณะสปินเนอร์ของการหมุนในสามมิติได้ด้วย สำหรับวัตถุสามมิติที่เชื่อมต่อกับสภาพแวดล้อม (คงที่) ด้วยเชือกหรือแถบที่หย่อนยาน เชือกหรือแถบเหล่านั้นสามารถคลายออกได้หลังจาก หมุนครบ สองรอบรอบแกนคงที่บางแกนจากสถานะเริ่มต้นที่ไม่พันกัน ในทางพีชคณิต ควอเทอร์เนียนที่อธิบายการหมุนดังกล่าวจะเปลี่ยนจากค่าสเกลาร์ +1 (เริ่มต้น) ผ่านค่า (สเกลาร์ + เวกเตอร์เทียม) ไปเป็นสเกลาร์ −1 (เมื่อหมุนครบหนึ่งรอบ) ผ่านค่า (สเกลาร์ + เวกเตอร์เทียม) กลับไปที่สเกลาร์ +1 (เมื่อหมุนครบสองรอบ) วงจรนี้จะเกิดขึ้นซ้ำทุกๆ 2 รอบ หลังจาก2nรอบ (จำนวนเต็มn > 0 ) โดยไม่มีการพยายามคลายออกระหว่างกลาง เชือก/แถบเหล่านั้นสามารถคลายออกได้บางส่วนกลับไปยังสถานะ2( n − 1)รอบด้วยการประยุกต์ใช้ขั้นตอนเดียวกันกับที่ใช้ในการคลายออกจาก 2 รอบเป็น 0 รอบ การใช้ขั้นตอนเดียวกันซ้ำnครั้ง จะทำให้ วัตถุที่พันกัน 2n รอบกลับคืนสู่สถานะคลายตัวหรือ 0 รอบ การคลายตัวยังช่วยขจัดแรงบิดที่เกิดจากการหมุนรอบเส้นเชือก/แถบเหล่านั้นด้วย สามารถใช้แบบจำลองเชิงกล 3 มิติอย่างง่ายเพื่อแสดงข้อเท็จจริงเหล่านี้ได้
เวกเตอร์โรดริเกส
เวกเตอร์ Rodrigues (บางครั้งเรียกว่าเวกเตอร์ Gibbsโดยมีพิกัดที่เรียกว่าพารามิเตอร์ Rodrigues ) [ 3 ] [ 4 ]สามารถแสดงได้ในรูปของแกนและมุมของการหมุนดังต่อไปนี้:

การแสดงผลนี้เป็นอนาล็อกในมิติที่สูงกว่าของการฉายภาพโนมอนิก โดยแมป ควอ เทอร์เนียนหน่วยจากทรงกลม 3 มิติไปยังระนาบไฮเปอร์ เวกเตอร์บริสุทธิ์ 3 มิติ
มีจุดไม่ต่อเนื่องที่ 180° ( πเรเดียน): เมื่อเวกเตอร์การหมุนใดๆrเข้าใกล้มุมπเรเดียน ค่าแทนเจนต์ของเวกเตอร์นั้นจะเข้าใกล้ค่าอนันต์
การหมุนgตามด้วยการหมุนfในการแสดงแทนแบบ Rodrigues มีรูปแบบการประกอบการหมุนอย่างง่าย

ในปัจจุบัน วิธีที่ตรงไปตรงมาที่สุดในการพิสูจน์สูตรนี้คือการใช้การแสดงแทนแบบดับเบิลเล็ต (ที่เที่ยงตรง) โดยที่g = n̂ tan aเป็นต้น
คุณสมบัติเชิงการจัดเรียงของการหาอนุพันธ์เมทริกซ์ ของ Pauli ที่กล่าวถึงข้างต้น นั้นเหมือนกับ การหาอนุพันธ์ ควอเทอร์เนียน ที่เทียบเท่าด้านล่าง ทุกประการ สร้างควอเทอร์เนียนที่เกี่ยวข้องกับการหมุนเชิงพื้นที่ R ดังนี้ จากนั้นการประกอบการหมุน RB กับ RAคือการหมุน RC = RBRA โดยมีแกนการหมุน และมุม ที่กำหนดโดยผลคูณของควอเทอร์เนียน นั่นคือ



ขยายผลคูณควอเทอร์เนียนนี้ไปเป็น

หารทั้งสองข้างของสมการนี้ด้วยเอกลักษณ์ที่ได้จากสมการก่อนหน้า แล้วคำนวณหาค่า


นี่คือสูตรของ Rodrigues สำหรับแกนของการหมุนแบบผสมที่กำหนดในแง่ของแกนของการหมุนส่วนประกอบทั้งสอง เขาได้สูตรนี้มาในปี พ.ศ. 2383 (ดูหน้า 408) [ 3 ] แกนการหมุนทั้งสามA , BและCก่อตัวเป็นรูปสามเหลี่ยมทรงกลม และมุมไดเฮดรัลระหว่างระนาบที่เกิดจากด้านของสามเหลี่ยมนี้จะถูกกำหนดโดยมุมการหมุน
เวกเตอร์การหมุนแบบคอนฟอร์มอล
การฉายภาพสเตอริโอกราฟิกของควอเทอร์เนียนหน่วยลงบนไฮเปอร์เพลนจินตภาพบริสุทธิ์เรียกว่าเวกเตอร์การหมุนแบบคอนฟอร์มอลโดยบางครั้งพิกัดของเวกเตอร์นี้จะเรียกว่าพารามิเตอร์โรดริเกสแบบดัดแปลง (MRPs)
เวกเตอร์การหมุนแบบคอนฟอร์มอลสามารถแสดงได้ในรูปของแกนออยเลอร์และมุม โดยที่ MRPs สามารถแสดงได้ในรูปของส่วนประกอบของควอเทอร์เนียนหน่วยที่แสดงถึงการหมุนแบบเดียวกันกับ


การฉายภาพสเตอริโอกราฟิกของควอเทอร์เนียนตรงข้าม−qส่งผลให้เวกเตอร์การหมุนเชิงคอนฟอร์มัล p s แตกต่าง จากการฉายภาพของควอเทอร์เนียนดั้งเดิมqเมื่อเปรียบเทียบส่วนประกอบจะได้ว่า ที่น่าสังเกตคือ ถ้าเวกเตอร์ตัวใดตัวหนึ่งอยู่ภายในทรงกลม 3 มิติหน่วย อีกตัวหนึ่งจะอยู่นอกทรงกลม

เมื่อใช้สัญลักษณ์เดียวกันกับข้างต้น จะได้ควอเทอร์เนียนหน่วยดังนี้:

พารามิเตอร์เคย์ลีย์-ไคลน์
ดูคำจำกัดความได้ที่Wolfram Mathworld
อนาล็อกมิติสูงกว่า
กฎการแปลงเวกเตอร์
การหมุนแบบแอคทีฟของเวกเตอร์ 3 มิติpในปริภูมิยูคลิดรอบแกนnด้วยมุมηสามารถเขียนได้ง่ายๆ ในรูปของผลคูณจุดและผลคูณไขว้ ดังนี้:
โดยที่ คือส่วนประกอบตามแนวยาวของpตามแนวnซึ่งกำหนดโดยผลคูณดอทคือ ส่วนประกอบตามแนวขวางของpเทียบกับnและ




คือผลคูณเชิงเวกเตอร์ ของpกับn
สูตรข้างต้นแสดงให้เห็นว่าส่วนประกอบตามแนวยาวของpยังคงไม่เปลี่ยนแปลง ในขณะที่ส่วนตามแนวขวางของpหมุนไปในระนาบที่ตั้งฉากกับnระนาบนี้เกิดจากส่วนตามแนวขวางของpเองและทิศทางที่ตั้งฉากกับทั้งpและn การหมุนสามารถระบุได้โดยตรงในสมการเป็นการ หมุน 2 มิติด้วยมุมη
การ หมุน แบบพาสซีฟสามารถอธิบายได้ด้วยสูตรเดียวกัน แต่มีเครื่องหมายตรงข้ามกับηหรือn
การแปลง
เมทริกซ์การหมุน ↔ มุมออยเลอร์
มุมออยเลอร์( φ , θ , ψ )สามารถหาได้จากเมทริกซ์การหมุนAโดยการตรวจสอบเมทริกซ์การหมุนในรูปแบบเชิงวิเคราะห์
เมทริกซ์การหมุน → มุมออยเลอร์ ( z - x - zภายนอก)
โดยใช้หลักการx -convention มุมออยเลอร์ภายนอก 3-1-3 φ , θและψ (รอบแกนz แกน xและแกน y อีกครั้ง) สามารถหาได้ดังนี้:


โปรดทราบว่าatan2( a , b )เทียบเท่ากับarctan เอ/ขโดยจะพิจารณาควอดแรนต์ที่จุด ( b , a )อยู่ด้วยดู atan2
เมื่อดำเนินการแปลง ต้องคำนึงถึงสถานการณ์หลายประการ: [ 5 ]
- โดยทั่วไปจะมีสองคำตอบในช่วง[− π , π ] 3สูตรข้างต้นใช้ได้เฉพาะเมื่อθอยู่ในช่วง[0, π ]เท่านั้น
- สำหรับกรณีพิเศษA 33 = 0ค่าφและψจะได้มาจากA 11และA 12
- มีคำ ตอบจำนวนอนันต์แต่มีคำตอบที่นับได้อยู่นอกช่วง[− π , π ] 3
- ว่าวิธีการแก้ปัญหาทางคณิตศาสตร์ทั้งหมดจะใช้ได้กับแอปพลิเคชันที่กำหนดหรือไม่นั้น ขึ้นอยู่กับสถานการณ์
มุมออยเลอร์ ( z - y ′- x ″ภายใน) → เมทริกซ์การหมุน
เมทริกซ์การหมุนA ถูกสร้างขึ้นจากมุมออยเลอร์ ภายใน 3-2-1 โดยการคูณเมทริกซ์ทั้งสามที่สร้างขึ้นจากการหมุนรอบแกน

แกนของการหมุนขึ้นอยู่กับแบบแผนที่ใช้ สำหรับ แบบแผน xการหมุนจะเป็นการหมุนรอบ แกน x , yและzด้วยมุมϕ , θและψ โดย เมทริกซ์แต่ละตัวมีดังนี้:
![{\displaystyle {\begin{aligned}\mathbf {A} _{X}&={\begin{bmatrix}1&0&0\\0&\cos \phi &-\sin \phi \\0&\sin \phi &\cos \phi \end{bmatrix}}\\[5px]\mathbf {A} _{Y}&={\begin{bmatrix}\cos \theta &0&\sin \theta \\0&1&0\\-\sin \theta &0&\cos \theta \end{bmatrix}}\\[5px]\mathbf {A} _{Z}&={\begin{bmatrix}\cos \psi &-\sin \psi &0\\\sin \psi &\cos \psi &0\\0&0&1\end{bเมทริกซ์}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d396db64b528dcfaed8795003f033d534ae5de87)
ผลลัพธ์ที่ได้ คือ หมายเหตุ: วิธีนี้ใช้ได้กับ ระบบ เลขชี้กำลังขวาซึ่งเป็นระบบที่ใช้กันทั่วไปในเกือบทุกสาขาวิศวกรรมและฟิสิกส์

การตีความเมทริกซ์การหมุนแบบมือขวาเหล่านี้คือ เมทริกซ์เหล่านี้แสดงถึงการแปลงพิกัด ( แบบพาสซี ฟ ) ตรงข้ามกับการแปลงจุด ( แบบแอคทีฟ ) เนื่องจากAแสดงถึงการหมุนจากเฟรมท้องถิ่น1ไปยังเฟรมสากล0 (กล่าวคือAเข้ารหัสแกนของเฟรม1เทียบกับเฟรม0 ) เมทริกซ์การหมุนพื้นฐานจึงประกอบขึ้นดังที่กล่าวมาข้างต้น เนื่องจากผกผันการหมุนเป็นเพียงการหมุนที่สลับตำแหน่ง หากเราต้องการการหมุนจากเฟรมสากลไปยังเฟรมท้องถิ่นจากเฟรม0ไปยังเฟรม1เราจะเขียนว่า

เมทริกซ์การหมุน ↔ แกน/มุมออยเลอร์
ถ้ามุมออยเลอร์θไม่ใช่พหุคูณของπแกนออยเลอร์êและมุมθสามารถคำนวณได้จากองค์ประกอบของเมทริกซ์การหมุนAดังนี้:

หรืออีกวิธีหนึ่ง สามารถใช้วิธีการต่อไปนี้ได้:
การแยกส่วนประกอบค่าลักษณะเฉพาะของเมทริกซ์การหมุนจะให้ค่าลักษณะเฉพาะ 1 และcos θ ± i sin θแกนออยเลอร์คือเวกเตอร์ลักษณะเฉพาะที่สอดคล้องกับค่าลักษณะเฉพาะ 1 และ สามารถคำนวณค่า θได้จากค่าลักษณะเฉพาะที่เหลือ
แกนออยเลอร์สามารถหา ได้ โดยใช้การแยกส่วนค่าเอกลักษณ์ เนื่องจากเป็นเวกเตอร์ปกติที่ครอบคลุมปริภูมิว่างของเมทริกซ์I − A
ในการแปลงกลับไปกลับมา สามารถคำนวณเมทริกซ์การหมุนที่สอดคล้องกับแกนออยเลอร์êและมุมθได้ตามสูตรการหมุนของ Rodrigues (โดยมีการปรับเปลี่ยนที่เหมาะสม) ดังนี้:
![{\displaystyle \mathbf {A} =\mathbf {I} _{3}\cos \theta +(1-\cos \theta ){\hat {\mathbf {e} }}{\hat {\mathbf {e} }}^{\mathsf {T}}+\left[{\hat {\mathbf {e} }}\right]_{\times }\sin \ทีต้า }](https://wikimedia.org/api/rest_v1/media/math/render/svg/c1e2785f256aa4d31f2f9fd0eda8a4290dcc1940)
โดยที่I 3คือเมทริกซ์เอกลักษณ์ขนาด 3 × 3 และ
![{\displaystyle \left[{\hat {\mathbf {e} }}\right]_{\times }={\begin{bmatrix}0&-e_{3}&e_{2}\\e_{3}&0&-e_{1}\\-e_{2}&e_{1}&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7543a05032b732bedc3c2a829bccdaa4a1767a08)
คือเมท ริกซ์ผลคูณไขว้
ซึ่งขยายความได้ดังนี้:

เมทริกซ์การหมุน ↔ ควอเทอร์เนียน
เมื่อคำนวณควอเทอร์เนียนจากเมทริกซ์การหมุน จะเกิดความกำกวมเรื่องเครื่องหมาย เนื่องจากqและ−q แทน การหมุนแบบเดียวกัน
วิธีหนึ่งในการคำนวณควอเทอร์เนียน จากเมทริกซ์การหมุนAมีดังนี้:


มีวิธีการคำนวณq ที่เทียบเท่าทางคณิตศาสตร์อีกสามวิธี ความไม่แม่นยำเชิงตัวเลขสามารถลดลงได้โดยการหลีกเลี่ยงสถานการณ์ที่ตัวหารอยู่ใกล้ศูนย์ หนึ่งในสามวิธีอื่น ๆ มีลักษณะดังนี้: [ 6 ] [ 7 ]

เมทริกซ์การหมุนที่สอดคล้องกับควอเทอร์เนียนqสามารถคำนวณได้ดังนี้: โดยที่ ซึ่งให้ผลลัพธ์ ดังนี้:



หรือเทียบเท่า

นี่เรียกว่าสูตรออยเลอร์-โรดริเกสสำหรับเมทริกซ์การแปลง

มุมออยเลอร์ ↔ ควอเทอร์เนียน
มุมออยเลอร์ ( z - x - zภายนอก) → ควอเทอร์เนียน
เราจะพิจารณาใช้มุมออยเลอร์ภายนอกแบบ 3-1-3 ตามแบบแผน xสำหรับอัลกอริทึมต่อไปนี้ เงื่อนไขของอัลกอริทึมจะขึ้นอยู่กับแบบแผนที่ใช้
เราสามารถคำนวณควอเทอร์เนียน จากมุมออยเลอร์( ϕ , θ , ψ )ได้ดังนี้:

มุมออยเลอร์ ( z - y ′- x ″ภายใน) → ควอเทอร์เนียน
ควอเทอร์เนียนที่เทียบเท่ากับ มุม yaw ( ψ ), pitch ( θ ) และ roll ( ϕ ) หรือมุม Tait–Bryan ภายใน ตาม แบบแผน z - y′ - x ″สามารถคำนวณได้โดย

ควอเทอร์เนียน → มุมออยเลอร์ ( z - x - zภายนอก)
เมื่อกำหนดควอเทอร์เนียนการหมุนแล้ว มุมออยเลอร์ภายนอก( φ , θ , ψ ) ตาม แบบแผนx -convention 3-1-3 สามารถคำนวณได้โดย


ควอเทอร์เนียน → มุมออยเลอร์ ( z - y ′- x ″ภายใน)
เมื่อทราบค่าควอเทอร์เนียนการหมุน มุมยอว์มุมพิทช์และมุมโรล หรือมุมเทต-ไบรอันที่แท้จริงตาม แบบแผน z - y ′- x ″ แล้ว สามารถคำนวณได้โดย

แกนออยเลอร์–มุม ↔ ควอเทอร์เนียน
เมื่อกำหนดแกนออยเลอร์êและมุมθแล้ว ควอเทอร์เนียนจะเป็นดังนี้
สามารถคำนวณได้โดย

เมื่อกำหนดควอเทอร์เนียนการหมุนq แล้ว ให้กำหนด จากนั้น สามารถคำนวณ แกนออยเลอร์êและมุมθ ได้โดย


เมทริกซ์การหมุน ↔ เวกเตอร์โรดริเกส
เวกเตอร์ Rodrigues → เมทริกซ์การหมุน
เนื่องจากนิยามของเวกเตอร์ Rodrigues สามารถเชื่อมโยงกับควอเทอร์เนียนการหมุนได้: โดยใช้คุณสมบัติต่อไปนี้สูตรสามารถหาได้โดยการแยกตัวประกอบq2 รจากนิพจน์สุดท้ายที่ได้สำหรับควอเทอร์เนียน:



นำไปสู่สูตรสุดท้าย:

สูตรการแปลงสำหรับอนุพันธ์
เมทริกซ์การหมุน ↔ ความเร็วเชิงมุม
เวกเตอร์ความเร็วเชิงมุม สามารถหาได้จากอนุพันธ์เทียบกับเวลาของเมทริกซ์การหมุนd A/d tโดยมีความสัมพันธ์ดังต่อไปนี้:

![{\displaystyle [{\boldสัญลักษณ์ {\omega }}]_{\times }={\begin{bmatrix}0&-\omega _{z}&\omega _{y}\\\omega _{z}&0&-\omega _{x}\\-\omega _{y}&\omega _{x}&0\end{bmatrix}}={\frac {\mathrm {d} \mathbf {A} }{\mathrm {d} t}}\mathbf {A} ^{\mathsf {T}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e77acfcca1f8dcc42a510d9c87e84bc9cac1fee2)
การพิสูจน์นี้ดัดแปลงมาจาก Ioffe [ 8 ]ดังต่อไปนี้:
สำหรับเวกเตอร์r 0 ใดๆ ให้พิจารณาr ( t ) = A ( t ) r 0แล้วทำการหาอนุพันธ์:

อนุพันธ์ของเวกเตอร์คือความเร็วเชิงเส้นของปลายเวกเตอร์นั้น เนื่องจากA เป็นเมทริกซ์การหมุน ตามคำนิยามแล้ว ความยาวของr ( t )จะเท่ากับความยาวของr₀ เสมอ ดังนั้นจึงไม่เปลี่ยนแปลงตามเวลา ดังนั้น เมื่อr ( t )หมุน ปลายเวกเตอร์จะเคลื่อนที่ไปตามวงกลม และความเร็วเชิงเส้นของปลายเวกเตอร์จะเป็นแนวสัมผัสกับวงกลม กล่าวคือ ตั้งฉากกับr ( t ) เสมอ ในกรณีเฉพาะนี้ ความสัมพันธ์ระหว่างเวกเตอร์ความเร็วเชิงเส้นและเวกเตอร์ความเร็วเชิงมุมคือ (ดูการเคลื่อนที่แบบวงกลมและผลคูณเชิงเวกเตอร์ )
![{\displaystyle {\frac {\mathrm {d} \mathbf {r} }{\mathrm {d} t}}={\boldsymbol {\omega }}(t)\times \mathbf {r} (t)=[{\boldsymbol {\omega }}]_{\times }\mathbf {r} (t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ff9424c8647883330a8b9d739cb95a0e06f1c7c)
โดยอาศัยคุณสมบัติการถ่ายทอดของสมการที่กล่าวมาข้างต้น
![{\displaystyle {\frac {\mathrm {d} \mathbf {A} }{\mathrm {d} t}}\mathbf {A} ^{\mathsf {T}}(t)\mathbf {r} (t)=[{\boldสัญลักษณ์ {\omega }}]_{\times }\mathbf {r} (t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c74108f541116e51a7ffb72a6f88465b229b727d)
ซึ่งหมายความว่า
![{\displaystyle {\frac {\mathrm {d} \mathbf {A} }{\mathrm {d} t}}\mathbf {A} ^{\mathsf {T}}(t)=[{\boldสัญลักษณ์ {\omega }}]_{\times }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5501f9dda072f6fd0085a041dc04e2208e7f7a32)
ควอเทอร์เนียน ↔ ความเร็วเชิงมุม
เวกเตอร์ความเร็วเชิงมุม สามารถหาได้จากอนุพันธ์ของควอเทอร์เนียนd q/d tดังต่อไปนี้: [ 9 ] โดยที่ q̃คือคอนจูเกต (อินเวอร์ส)ของ q

ในทางกลับกัน อนุพันธ์ของควอเทอร์เนียนคือ

โรเตอร์ในพีชคณิตเชิงเรขาคณิต
สูตรของพีชคณิตเชิงเรขาคณิต (GA) เป็นการขยายและตีความวิธีการควอเทอร์เนียน หัวใจสำคัญของ GA คือผลคูณเชิงเรขาคณิตของเวกเตอร์ ซึ่งเป็นการขยายผลคูณภายในและผลคูณไขว้ แบบดั้งเดิม โดยกำหนดโดย

โดยที่สัญลักษณ์∧หมายถึงผลคูณภายนอกหรือผลคูณลิ่มผลคูณของเวกเตอร์aและb นี้ ให้ผลลัพธ์สองส่วน คือ ส่วนที่เป็นสเกลาร์จากผลคูณภายใน และ ส่วนที่ เป็นไบเวกเตอร์จากผลคูณลิ่ม ไบเวกเตอร์นี้อธิบายระนาบที่ตั้งฉากกับสิ่งที่ผลคูณไขว้ของเวกเตอร์จะให้ผลลัพธ์
ในอัลกอริทึมพันธุกรรม (GA) ไบเวกเตอร์มีคุณสมบัติที่ผิดปกติบางอย่างเมื่อเทียบกับเวกเตอร์ ภายใต้ผลคูณเชิงเรขาคณิต ไบเวกเตอร์จะมีกำลังสองเป็นลบ: ไบเวกเตอร์x̂ŷ อธิบายระนาบ xy กำลังสองของมันคือ ( x̂ŷ ) 2 = x̂ŷx̂ŷเนื่องจากเวกเตอร์ฐานหน่วยตั้งฉากกัน ผลคูณเชิงเรขาคณิตจึงลดลงเหลือผลคูณภายนอกแบบไม่สมมาตร ดังนั้นx̂และŷสามารถสลับกันได้อย่างอิสระโดยมีค่าใช้จ่ายเป็น −1 กำลังสองลดลงเหลือ− x̂x̂ŷŷ = −1เนื่องจากเวกเตอร์ฐานเองกำลังสองได้ +1
ผลลัพธ์นี้ใช้ได้โดยทั่วไปกับไบเวกเตอร์ทั้งหมด และด้วยเหตุนี้ ไบเวกเตอร์จึงมีบทบาทคล้ายกับหน่วยจินตนาการพีชคณิตเชิงเรขาคณิตใช้ไบเวกเตอร์ในรูปแบบที่คล้ายกับควอเท อร์เนียน คือ โรเตอร์ ซึ่ง กำหนดโดย โดย ที่B̂คือไบเวกเตอร์หน่วยที่อธิบายระนาบการหมุนเนื่องจากB̂ยกกำลังสองได้ −1 การขยาย อนุกรมกำลังของRจึงสร้างฟังก์ชันตรีโกโนเมตริกสูตรการหมุนที่แปลงเวกเตอร์aเป็นเวกเตอร์ที่หมุนแล้วbคือ โดย ที่ คือส่วนกลับของ(การกลับลำดับของเวกเตอร์ในเทียบเท่ากับการเปลี่ยนเครื่องหมาย)





ตัวอย่าง การหมุนรอบแกน สามารถทำได้โดยการแปลงv̂ไปเป็นไบเวกเตอร์คู่ของมัน โดยที่i = x̂ŷẑคือองค์ประกอบปริมาตรหน่วย ซึ่งเป็นไตรเวกเตอร์ (ซูโดสเกลาร์) เพียงตัวเดียวในปริภูมิสามมิติ ผลลัพธ์คือ



อย่างไรก็ตาม ในพื้นที่สามมิติ มักจะง่ายกว่าที่จะปล่อยให้สูตรB̂ = iv̂ เป็น ไปตามเดิม โดยใช้ข้อเท็จจริงที่ว่าiสลับที่ได้กับวัตถุทั้งหมดใน 3 มิติ และยกกำลังสองได้เท่ากับ −1 การหมุน เวกเตอร์ x̂ในระนาบนี้ด้วยมุมθจะเป็นดังนี้

เมื่อพิจารณาว่า และ− v̂x̂v̂คือการสะท้อนของx̂รอบระนาบที่ตั้งฉากกับ v̂จะทำให้สามารถตีความการหมุนในเชิงเรขาคณิตได้ กล่าวคือ การหมุนจะคงส่วนประกอบที่ขนานกับ v̂ ไว้และเปลี่ยนแปลงเฉพาะส่วนประกอบที่ตั้งฉากเท่านั้น จากนั้นจึงคำนวณค่าต่างๆ ดังนี้:


ผลลัพธ์ของการหมุนคือ

การตรวจสอบผลลัพธ์นี้อย่างง่ายคือ มุมθ = 2/3πการหมุนดังกล่าวควรจะแมป x̂ไปยัง ŷ อัน ที่จริง การหมุนจะลดลงเหลือ

ตรงตามที่คาดไว้ สูตรการหมุนนี้ใช้ได้ไม่เพียงแต่กับเวกเตอร์เท่านั้น แต่ยังใช้ได้กับมัลติเวกเตอร์ ใดๆ ด้วย นอกจากนี้ เมื่อใช้มุมออยเลอร์ ความซับซ้อนของการดำเนินการจะลดลงอย่างมาก การหมุนแบบผสมมาจากการคูณโรเตอร์ ดังนั้นโรเตอร์ทั้งหมดจากมุมออยเลอร์จึงเป็น แต่ โรเตอร์เหล่านี้ได้กลับออกมาจากเลขชี้กำลังดังนี้: โดยที่R βหมายถึงการหมุนในพิกัดเดิม ในทำนองเดียวกันสำหรับการหมุน γ สังเกตว่าR γและR αสลับที่ได้ (การหมุนในระนาบเดียวกันต้องสลับที่ได้) และโรเตอร์ทั้งหมดจึงกลายเป็น





ดังนั้น การหมุนเชิงซ้อนของมุมออยเลอร์จึงกลายเป็นชุดของการหมุนที่เทียบเท่ากันในกรอบอ้างอิงคงที่เดิม
แม้ว่าการหมุนในพีชคณิตเชิงเรขาคณิตจะทำงานเกือบเหมือนกับควอเทอร์เนียนในสามมิติ แต่พลังของการกำหนดสูตรนี้อยู่ที่ความทั่วไป: วิธีนี้เหมาะสมและใช้ได้ในปริภูมิที่มีจำนวนมิติใด ๆ ก็ได้ ใน 3 มิติ การหมุนมีสามองศาอิสระ โดยแต่ละองศาสำหรับระนาบอิสระเชิงเส้น (ไบเวกเตอร์) ที่การหมุนสามารถเกิดขึ้นได้ เป็นที่ทราบกันดีว่าสามารถใช้คู่ของควอเทอร์เนียนเพื่อสร้างการหมุนใน 4 มิติ ทำให้ได้หกองศาอิสระ และวิธีการทางพีชคณิตเชิงเรขาคณิตได้ตรวจสอบผลลัพธ์นี้: ใน 4 มิติ มีไบเวกเตอร์อิสระเชิงเส้นหกตัวที่สามารถใช้เป็นตัวสร้างการหมุนได้
ดูเพิ่มเติม
อ่านเพิ่มเติม
- Shuster, MD (1993). "การสำรวจการแสดงทัศนคติ" (PDF) . วารสารวิทยาศาสตร์การบินอวกาศ . 41 (4): 439– 517.
- Taubin, G. (2011). "การหมุน 3 มิติ" . IEEE Computer Graphics and Applications . 31 (6): 84– 89. doi : 10.1109/MCG.2011.92 . PMID 24808261 .
- Coutsias, E.; Romero, L. (2004). "ควอเทอร์เนียนกับการประยุกต์ใช้กับพลศาสตร์ของวัตถุแข็งเกร็ง"รายงานทางเทคนิคของ Sandiaห้องปฏิบัติการแห่งชาติ Sandia SAND2004-0153
- Markley, F. Landis (2003). "การแสดงข้อผิดพลาดของทัศนคติสำหรับการกรอง Kalman" วารสารการนำทาง การควบคุม และพลศาสตร์ 26 ( 2): 311– 7. doi : 10.2514/2.5048 . hdl : 2060/20020060647 .
- โกลด์สไตน์, เอช. (1980). กลศาสตร์คลาสสิก (ฉบับที่ 2). แอดดิสัน-เวสลีย์. ISBN 0-201-02918-9.
- เวิร์ตซ์, เจมส์ อาร์. (1980). การกำหนดและการควบคุมทิศทางของยานอวกาศ . ดี. ไรเดล . ISBN 90-277-1204-2.
- Schmidt, J.; Niemann, H. (2001). "การใช้ควอเทอร์เนียนสำหรับการกำหนดพารามิเตอร์การหมุน 3 มิติในการเพิ่มประสิทธิภาพแบบไม่เชิงเส้นที่ไม่มีข้อจำกัด". รายงานการประชุม Vision Modeling and Visualization Conference 2001. IOS Press. หน้า 399–406 . ISBN 3-89838-028-9.
- รถม้าสี่ล้อ, L.; ลิฟชิตซ์, อีเอ็ม (1976) กลศาสตร์ (ฉบับที่ 3). สำนักพิมพ์เพอร์กามอนไอเอสบีเอ็น 0-08-021022-8.
- Klumpp, AR (ธันวาคม 1976). "การสกัดควอเทอร์เนียนแบบปราศจากเอกลักษณ์จากเมทริกซ์ทิศทาง-โคไซน์" วารสารยานอวกาศและจรวด 13 ( 12): 754– 5. doi : 10.2514/3.27947 .
- Doran, C.; Lasenby, A. (2003). พีชคณิตเชิงเรขาคณิตสำหรับนักฟิสิกส์ . สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์. ISBN 978-0-521-71595-9.
- Terzakis, G.; Lourakis, M.; Ait-Boudaoud, D. (2018). "พารามิเตอร์ Rodrigues ที่ปรับปรุงแล้ว: การแสดงทิศทางที่มีประสิทธิภาพในการมองเห็นและกราฟิก 3 มิติ"วารสารMathematical Imaging and Vision 60 ( 3): 422– 442. doi : 10.1007/s10851-017-0765-x .
- Rowenhorst, D.; Rollett, AD; Rohrer, GS; Groeber, M.; Jackson, M.; Konijnenberg, PJ; De Graef, M. (2015). "การแสดงผลที่สอดคล้องกันและการแปลงระหว่างการหมุน 3 มิติ"การสร้างแบบจำลองและการจำลองในวิทยาศาสตร์และวิศวกรรมวัสดุ 23 ( 8) 083501. doi : 10.1088/0965-0393/23/8/083501 .
ลิงก์ภายนอก
- EuclideanSpaceมีข้อมูลมากมายเกี่ยวกับการแสดงผลการหมุน
- Q36. ฉันจะสร้างเมทริกซ์การหมุนจากมุมออยเลอร์ได้อย่างไร?และQ37. ฉันจะแปลงเมทริกซ์การหมุนเป็นมุมออยเลอร์ได้อย่างไร? — คำถามที่พบบ่อยเกี่ยวกับเมทริกซ์และควอเทอร์เนียน
- จำนวนจินตภาพไม่ใช่จำนวนจริง – พีชคณิตเชิงเรขาคณิตของกาลอวกาศ – หัวข้อ "การหมุนและพีชคณิตเชิงเรขาคณิต" อธิบายและประยุกต์ใช้คำอธิบายการหมุนแบบโรเตอร์
- บทเรียน DCM ของ Starlino – บทเรียนทฤษฎีเมทริกซ์โคไซน์ทิศทางและการประยุกต์ใช้ อัลกอริทึมการประมาณการวางแนวในอวกาศโดยใช้อุปกรณ์ IMU เช่น มาตรวัดความเร่ง ไจโรสโคป และมาตรวัดสนามแม่เหล็ก การใช้ตัวกรองเสริม (ทางเลือกยอดนิยมแทนตัวกรอง Kalman) ร่วมกับเมทริกซ์ DCM
- ทรงกลมหมุน – วิธีทางเรขาคณิตในการสร้างการหมุนสองแบบเข้าด้วยกัน
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ สูตรการหมุนในสามมิติ
ในเรขาคณิตมีสูตรต่างๆ มากมายที่ใช้ในการแสดงการหมุนในสามมิติ ในรูปของ การแปลงทางคณิตศาสตร์ในฟิสิกส์ แนวคิดนี้ถูกนำไปประยุกต์ใช้กับกลศาสตร์คลาสสิก โดยที่ จลนศาสตร์การหมุน...
การหมุนและการเคลื่อนที่
การกำหนดสูตรการหมุนมุ่งเน้นไปที่การเคลื่อนที่ที่เหมาะสม ( รักษาทิศทาง ) ใน ปริภูมิยูคลิด ที่มี จุดคงที่จุดหนึ่ง ซึ่ง การหมุน นั้น อ้างอิงถึงจุดนั้น แม้ว่าการเคลื่อนที่ทางกายภาพที่มีจุดคงที่จะเป็นกรณีสำคัญ (เช่น การเคลื่อนที่ที่อธิบายใน กรอบอ้างอิงศูนย์กลางมวล...
เมทริกซ์การหมุน
กลุ่ม เวกเตอร์หน่วย สามตัวที่กล่าวถึงข้างต้นเรียกว่า ฐาน (basis ) การระบุ พิกัด ( ส่วนประกอบ ) ของเวกเตอร์ในฐานนี้ ณ ตำแหน่งปัจจุบัน (ที่หมุนแล้ว) ในแง่ของแกนพิกัดอ้างอิง (ที่ไม่หมุน) จะอธิบายการหมุนได้อย่างสมบูรณ์ เวกเตอร์หน่วยสามตัว û , v̂ และ ŵ...
แกนและมุมของออยเลอร์ (เวกเตอร์การหมุน)
จาก ทฤษฎีบทการหมุนของออยเลอร์ เราทราบว่าการหมุนใดๆ สามารถแสดงได้ในรูปการหมุนเพียงครั้งเดียวรอบแกนใดแกนหนึ่ง แกนนั้นคือเวกเตอร์หน่วย (มีเอกลักษณ์เฉพาะตัว ยกเว้นเครื่องหมาย) ซึ่งไม่เปลี่ยนแปลงไปจากการหมุน ขนาดของมุมก็มีเอกลักษณ์เฉพาะตัวเช่นกัน...