อ่าน 17 นาที
มุม
ในทางเรขาคณิตมุมเกิดจากเส้นตรง สองเส้น ที่มาบรรจบกันที่จุดหนึ่งแต่ละเส้นเรียกว่าด้านของมุม และจุดที่เส้นทั้งสองมาบรรจบกันเรียกว่าจุดยอดของมุม
มุม

ในทางเรขาคณิตมุมเกิดจากเส้นตรง สองเส้น ที่มาบรรจบกันที่จุดหนึ่ง[ 1 ]แต่ละเส้นเรียกว่าด้านของมุม และจุดที่เส้นทั้งสองมาบรรจบกันเรียกว่าจุดยอดของมุม[ 2 ] [ 3 ]คำว่ามุมใช้เพื่อแสดงถึงทั้งรูปทรงเรขาคณิตและขนาดหรือปริมาณที่เกี่ยวข้องการวัดมุมหรือการวัดมุมบางครั้งใช้เพื่อแยกความแตกต่างระหว่างการวัดปริมาณและรูปทรง การวัดมุมมีความเชื่อมโยงโดยตรงกับวงกลมและการหมุน และมักจะแสดงภาพหรือกำหนดโดยใช้ส่วนโค้งของวงกลมที่มีจุดศูนย์กลางอยู่ที่จุดยอดและอยู่ระหว่างด้านทั้งสอง
หลักการพื้นฐาน
ไม่มีคำจำกัดความของมุมที่เป็นที่ยอมรับกันโดยทั่วไป[ 4 ]มุมสามารถถูกคิดและใช้งานได้หลากหลายวิธี และในขณะที่อาจมีการกำหนดคำจำกัดความที่ถูกต้องสำหรับบริบทเฉพาะ แต่ก็ยากที่จะให้คำจำกัดความที่เป็นทางการเพียงคำเดียวที่น่าพอใจอย่างสมบูรณ์ในการครอบคลุมทุกแง่มุมของแนวคิดทั่วไปของมุม[ 5 ]
นิยามมาตรฐานอย่างหนึ่งคือ มุมเป็นรูปทรงที่ประกอบด้วยรังสีสองเส้นซึ่งอยู่ในระนาบเดียวกันและมีจุดปลายร่วมกัน หรืออีกทางหนึ่ง มุมอาจนิยามได้ดังนี้: ช่องว่างระหว่างรังสีทั้งสอง; พื้นที่ของระนาบที่อยู่ระหว่างรังสีทั้งสอง; หรือปริมาณการหมุนรอบจุดยอดของรังสีเส้นหนึ่งไปยังอีกเส้นหนึ่ง
โดยทั่วไป มุมจะเกิดขึ้นทุกครั้งที่เส้นตรงสองเส้นมาบรรจบกัน เช่น ที่มุมของรูปสามเหลี่ยมและรูปหลายเหลี่ยมอื่นๆ[ 2 ]หรือที่จุดตัดของระนาบหรือเส้นโค้ง สองเส้น ซึ่งในกรณีนี้ รังสีที่สัมผัสกับเส้นโค้งแต่ละเส้น ณ จุดตัดจะกำหนดมุม[ 6 ]
โดยทั่วไปแล้ว มักพิจารณาว่าด้านของมุมแบ่งระนาบออกเป็นสองบริเวณที่เรียกว่าบริเวณภายในมุมและบริเวณภายนอกมุมบริเวณภายในมุมยังเรียกว่าส่วนเชิงมุม อีกด้วย [ 7 ] [ 8 ] [ a ]
สัญลักษณ์และการวัด






สัญลักษณ์มุม ( หรืออ่านว่า "มุม") พร้อมด้วยจุดกำหนดหนึ่งหรือสามจุด ใช้เพื่อระบุมุมในรูปทรงเรขาคณิต ตัวอย่างเช่น มุมที่มีจุดยอด A ซึ่งเกิดจากรังสีและจะใช้สัญลักษณ์(โดยใช้จุดยอดเพียงอย่างเดียว) หรือ (โดยระบุจุดยอด ไว้ ตรงกลางเสมอ) ขนาดหรือการวัดของมุมจะใช้สัญลักษณ์หรือ





ในรูปทรงเรขาคณิตและนิพจน์ทางคณิตศาสตร์เป็นเรื่องปกติที่จะใช้อักษรกรีก ( α , β , γ , θ , φ , ...) หรืออักษรโรมันตัวเล็ก ( a , b , c , ...) เป็นตัวแปรเพื่อแสดงขนาดของมุม[ 12 ]โดยทั่วไปแล้วการวัดมุมจะเป็นปริมาณสเกลาร์ [ 13 ]แม้ว่าในฟิสิกส์และบางสาขาของคณิตศาสตร์ จะมีการใช้มุม ที่มีเครื่องหมาย ตามธรรมเนียมเพื่อระบุทิศทางการหมุน: บวกสำหรับการ หมุนทวนเข็มนาฬิกา; ลบสำหรับการหมุนตามเข็มนาฬิกา[ 14 ]
หน่วยวัด
มุมจะถูกวัดด้วยหน่วยต่างๆ หน่วยที่ใช้กันทั่วไปคือองศา (แทนด้วยสัญลักษณ์° ) เรเดียน (แทนด้วยสัญลักษณ์rad ) และการหมุนหน่วยเหล่านี้แตกต่างกันในวิธีการแบ่งมุมเต็มซึ่งเป็นมุมที่รังสีหนึ่งซึ่งเดิมเท่ากันกับรังสีอีกอันหนึ่ง หมุนรอบจุดยอดจนกลับมาอยู่ที่ตำแหน่ง เริ่ม ต้น[ 15 ]
องศาและการหมุนถูกกำหนดโดยตรงโดยอ้างอิงถึงมุมเต็ม ซึ่งวัดได้ 1 รอบหรือ 360° [ 16 ]การวัดเป็นรอบจะให้ขนาดของมุมเป็นสัดส่วนของมุมเต็ม และองศาสามารถถือได้ว่าเป็นส่วนย่อยของการหมุน เรเดียนไม่ได้ถูกกำหนดโดยตรงโดยสัมพันธ์กับมุมเต็ม (ดู§ การวัดมุม ) แต่ในลักษณะที่การวัดของมันคือ 2 π เรเดียน ประมาณ 6.28 เรเดียน[ 17 ]
ในอดีต หน่วยองศาถูกเลือกใช้ เช่น มุมตรงหรือครึ่งหนึ่งของมุมเต็มจะถูกกำหนดให้มีค่าเท่ากับ 180 องศา
การบวกและการลบ

หลักการบวกมุมระบุว่า ถ้า D เป็นจุดที่อยู่ในบริเวณด้านในของมุมนั้น: [ 18 ]ความสัมพันธ์นี้กำหนดความหมายของการบวกมุมสองมุมใดๆ: จุดยอดของมุมทั้งสองจะอยู่ด้วยกันโดยมีด้านร่วมกันเพื่อสร้างมุมใหม่ที่ใหญ่กว่า ขนาดของมุมใหม่ที่ใหญ่กว่าคือผลรวมของขนาดของมุมทั้งสอง การลบเป็นไปตามการจัดเรียงสูตรใหม่[ 18 ]

ประเภท
มุมทั่วไป

- มุมที่เท่ากับ 0° หรือไม่หมุนเรียกว่ามุมศูนย์ [ 19 ]
- มุม ที่เล็กกว่ามุมฉาก (น้อยกว่า 90°) เรียกว่ามุมแหลม[ 20 ]
- มุมที่เท่ากับ1/4หมุน ( 90 ° หรือπ/2rad ) เรียกว่ามุมฉาก เส้นตรงสองเส้นที่ทำมุมฉากกันเรียกว่าเส้นตั้งฉากเส้นตั้งฉากหรือเส้นขนาน[ 21 ]
- มุมที่มีขนาดใหญ่กว่ามุมฉากและเล็กกว่ามุมตรง (ระหว่าง 90° ถึง 180°) เรียกว่ามุมป้าน[ 20 ] ("ป้าน" หมายถึง "ทื่อ")
- มุมที่เท่ากับ1/2การ หมุน (180° หรือπ เรเดียน) เรียกว่ามุมตรง[ 19 ]
- มุมที่ใหญ่กว่ามุมตรงแต่เล็กกว่า 1 รอบ (ระหว่าง 180° ถึง 360°) เรียกว่ามุมสะท้อน
- มุมที่เท่ากับ 1 รอบ (360° หรือ 2π เรเดียน) เรียกว่ามุมเต็มมุมสมบูรณ์มุมกลมหรือเพริกอน
- มุม ที่ไม่ใช่ผลคูณของมุมฉากเรียกว่ามุมเฉียง
มุมประชิดและมุมตรงข้าม
 มุม A และมุม B เป็นมุมประชิดกัน
มุม A และมุม B เป็นมุมประชิดกัน มุม A และ B และคู่มุม C และ D เป็นมุมตรงข้ามสองคู่เครื่องหมายขีดแสดงถึงความเท่ากันระหว่างคู่มุมเหล่านั้น
มุม A และ B และคู่มุม C และ D เป็นมุมตรงข้ามสองคู่เครื่องหมายขีดแสดงถึงความเท่ากันระหว่างคู่มุมเหล่านั้น


มุมประชิด (ย่อว่า adj. ∠s ) คือมุมที่ใช้จุดยอดและขอบร่วมกัน แต่ไม่มีจุดภายในร่วมกัน กล่าวอีกนัยหนึ่งคือ เป็นมุมที่อยู่เคียงข้างกัน โดยใช้ "แขน" ร่วมกัน
มุมตรงข้ามเกิดขึ้นเมื่อเส้นตรงสองเส้นตัดกันที่จุดหนึ่ง ทำให้เกิดมุมสี่มุม มุมคู่หนึ่งที่อยู่ตรงข้ามกันเรียกว่ามุมตรงข้ามมุมตรงข้ามหรือมุมตรงข้ามกันในแนวตั้ง (ย่อว่า vert. opp. ∠s ) [ 22 ]โดยคำว่า "ตรงข้าม" หมายถึงการใช้จุดยอดร่วมกัน ไม่ใช่การวางตัวในแนวตั้ง ทฤษฎีบทหนึ่งกล่าวว่ามุมตรงข้ามจะมีขนาดเท่ากันเสมอ [ 23 ] เส้นตัดขวางคือเส้นที่ตัดกับเส้นตรงสองเส้น (มักจะเป็นเส้นขนาน) และเกี่ยวข้องกับมุมภายนอกมุมภายในมุมภายนอกสลับมุมภายในสลับ มุมที่สอดคล้องกันและมุมภายในที่ต่อเนื่องกัน [ 24 ]
การรวมคู่มุม
เมื่อทำการบวกมุมสองมุม (ไม่ว่าจะเป็นมุมประชิดหรือมุมที่อยู่ห่างกัน) จะมีกรณีพิเศษสามกรณีที่เรียกว่ามุมประกอบมุมเสริมและมุม เติมเต็ม
มุมประกอบคือ มุมคู่ที่มีผลรวมของขนาดเท่ากับมุมฉาก ( 1/4เลี้ยว 90 องศาหรือπ/2 rad) ถ้ามุมเสริมสองมุมอยู่ติดกัน ด้านที่ไม่ใช้ร่วมกันของมุมทั้งสองจะประกอบกันเป็นมุมฉาก ในสามเหลี่ยมมุมฉาก มุมแหลมสองมุมจะเป็นมุมเสริมกัน เนื่องจากผลรวมของมุมภายในของสามเหลี่ยมเท่ากับ 180° ผลต่างระหว่างมุมกับมุมฉากเรียกว่ามุมเสริมของมุม[ 6 ]
มุมเสริมกันจะรวมกันได้เป็นมุมเส้นตรง ( 1/2หมุน 180° หรือπเรเดียน) ถ้ามุมเสริมสองมุมอยู่ติดกันด้านที่ไม่ใช้ร่วมกันของมุมทั้งสองจะก่อให้เกิดมุมตรงหรือเส้นตรงและเรียกว่าคู่มุมเส้นตรง[ 25 ]ผลต่างระหว่างมุมกับมุมตรงเรียกว่ามุมเสริมของมุม[ 26 ]
มุมเสริมหรือมุมคู่ควบรวมกันได้เท่ากับมุมเต็ม (1 รอบ, 360° หรือ 2πเรเดียน ) [ 27 ]ผลต่างระหว่างมุมกับมุมเต็มเรียกว่ามุมเสริมหรือมุมคู่ควบของมุมนั้น [ 28 ] [ 29 ]
ตัวอย่างของมุมเสริมที่ไม่ได้อยู่ติดกัน ได้แก่ มุมที่อยู่ติดกันของรูปสี่เหลี่ยมด้านขนานและมุมตรงข้ามของรูปสี่เหลี่ยม บน วงกลม สำหรับวงกลมที่มีจุดศูนย์กลาง O และเส้นสัมผัสจากจุดภายนอก P สัมผัสวงกลมที่จุด T และ Q มุมที่ได้คือ ∠TPQ และ ∠TOQ ซึ่งรวมกันได้ 180 องศา
 มุม
มุมaและbเป็นมุมประกอบ มุมฉาก มุม
มุมaและbเป็นมุมเสริมกัน มุม
มุมAOBและCODเป็น มุม เสริมหรือมุม คู่ควบ



มุมที่เกี่ยวข้องกับรูปหลายเหลี่ยม
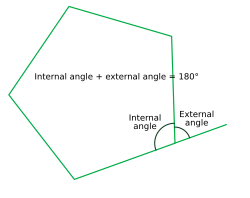
- มุมที่เป็นส่วนหนึ่งของรูปหลายเหลี่ยมเชิงเดี่ยวเรียกว่ามุมภายในถ้ามุมนั้นอยู่ด้านในของรูปหลายเหลี่ยมเชิงเดี่ยวนั้นรูปหลายเหลี่ยมเว้าเชิงเดี่ยวจะมีมุมภายในอย่างน้อยหนึ่งมุม ซึ่งก็คือมุมสะท้อนในเรขาคณิตแบบยุคลิดผลรวมของมุมภายในของสามเหลี่ยมเท่ากับπเรเดียน หรือ 180 °1/2การ หมุน ; ผลรวมของมุมภายในของรูปสี่เหลี่ยมด้านนูน อย่างง่าย เท่ากับ 2π เรเดียน , 360° หรือ 1 รอบ โดยทั่วไป ผลรวมของมุมภายในของรูปหลายเหลี่ยม ด้านนูนอย่างง่าย ที่มีnด้าน เท่ากับ ( n − 2) π เรเดียน หรือ ( n − 2)180 องศา, ( n − 2)2 มุมฉาก หรือ ( n − 2)1/2เลี้ยว
- มุมเสริมของมุมภายในเรียกว่ามุมภายนอกกล่าวคือ มุมภายในและมุมภายนอกเป็นคู่มุมเชิง เส้น มีมุมภายนอกสองมุมที่แต่ละจุดยอดของรูปหลายเหลี่ยม โดยแต่ละมุมกำหนดโดยการต่อด้านใดด้านหนึ่งของรูปหลายเหลี่ยมที่มาบรรจบกันที่จุดยอด มุมทั้งสองนี้เป็นมุมตรงข้ามกัน ดังนั้นจึงเท่ากัน มุมภายนอกวัดปริมาณการหมุนที่ต้องทำที่จุดยอดเพื่อวาดรูปหลายเหลี่ยม[ 30 ]หากมุมภายในที่สอดคล้องกันเป็นมุมสะท้อน มุมภายนอกควรพิจารณาว่าเป็นลบ แม้ในรูปหลายเหลี่ยมที่ไม่ใช่รูปหลายเหลี่ยมแบบง่าย ก็อาจสามารถกำหนดมุมภายนอกได้ อย่างไรก็ตาม จะต้องเลือกทิศทางของระนาบ (หรือพื้นผิว ) เพื่อตัดสินเครื่องหมายของการวัดมุมภายนอก ในเรขาคณิตแบบยุคลิด ผลรวมของมุมภายนอกของรูปหลายเหลี่ยมนูนอย่างง่าย หากสมมติว่ามีเพียงมุมภายนอกมุมเดียวจากสองมุมที่แต่ละจุดยอด จะเท่ากับหนึ่งรอบเต็ม (360°) มุมภายนอกในที่นี้อาจเรียกว่ามุมภายนอกเสริมมุมภายนอกมักใช้ในโปรแกรม Logo Turtleเมื่อวาดรูปหลายเหลี่ยมปกติ
- ในรูปสามเหลี่ยมเส้นแบ่งครึ่งมุมภายนอกสองมุมและเส้นแบ่งครึ่งมุมภายในอีกมุมหนึ่งจะ มาบรรจบ กันที่จุดเดียว[ 31 ] : 149
- ในรูปสามเหลี่ยม จุดตัดสามจุด ซึ่งแต่ละจุดเป็นเส้นแบ่งครึ่งมุมภายนอกกับด้านตรงข้าม ที่ต่อออกไป จะอยู่บนเส้นตรงเดียวกัน [ 31 ] : 149
- ในรูปสามเหลี่ยม จุดตัดสามจุด สองจุดอยู่ระหว่างเส้นแบ่งครึ่งมุมภายในกับด้านตรงข้าม และจุดที่สามอยู่ระหว่างเส้นแบ่งครึ่งมุมภายนอกอีกเส้นกับด้านตรงข้ามที่ต่อออกไป จะอยู่บนเส้นเดียวกัน[ 31 ] : 149
- ผู้เขียนบางคนใช้ชื่อมุมภายนอกของรูปหลายเหลี่ยมแบบง่ายเพื่อหมายถึงมุมภายนอกเสริม ( ไม่ใช่มุมเสริม!) ของมุมภายใน[ 32 ]ซึ่งขัดแย้งกับการใช้งานข้างต้น
มุมที่เกี่ยวข้องกับระนาบ
- มุมระหว่างระนาบสองระนาบ (เช่น หน้าที่อยู่ติดกันสองหน้าของทรงหลายเหลี่ยม ) เรียกว่ามุมไดเฮดรัล [ 6 ] อาจนิยามได้ว่าเป็นมุมแหลมระหว่างเส้นสองเส้นที่ตั้งฉากกับระนาบ
- มุมระหว่างระนาบกับเส้นตรงที่ตัดกันจะเป็นมุมประกอบกับมุมระหว่างเส้นตรงที่ตัดกันกับเส้นตั้งฉากกับระนาบนั้น
การวัดมุม
การวัดมุมนั้นครอบคลุมทั้งการวัดทางกายภาพโดยตรงโดยใช้เครื่องมือวัด เช่นไม้โปรแทรกเตอร์รวมถึงการคำนวณขนาดของมุมทางทฤษฎีจากปริมาณที่ทราบอื่นๆ แม้ว่าการวัดมุมจะมีความเชื่อมโยงโดยตรงกับการหมุนและวงกลม แต่ก็มีมุมมองที่หลากหลายเกี่ยวกับสิ่งที่กำลังวัดอยู่ ซึ่งรวมถึง: ปริมาณการหมุนรอบจุดยอดของรังสีหนึ่งไปยังอีกรังสีหนึ่ง[ 33 ]ปริมาณการเปิดระหว่างรังสี[ 34 ]หรือความยาวของส่วนโค้งที่รองรับมุมที่จุดศูนย์กลางของวงกลมหน่วย[ 35 ]
การวัดมุมนั้นแตกต่างจากการวัดปริมาณทางกายภาพอื่นๆ เช่น ความยาวโดยเนื้อแท้[ 36 ]มุมที่มีความสำคัญเป็นพิเศษ (เช่น มุมฉาก) เป็นตัวกำหนดระบบและหน่วยของการวัดมุม ซึ่งไม่เป็นเช่นนั้นสำหรับความยาวที่หน่วยการวัด (เมตร ฟุต) เป็นไปตามอำเภอใจ
โดยทั่วไปแล้ว การวัดมุมมีสองแนวทางหลัก ได้แก่ การวัดเทียบกับมุมอ้างอิง (เช่น มุมฉาก) และการวัดแบบวงกลม
มุมอ้างอิง
มุมอ้างอิงที่เลือกไว้ (มุมฉาก มุมตรง หรือมุมเต็ม) สามารถแบ่งออกเป็นส่วนเท่าๆ กันได้ และขนาดของส่วนหนึ่งสามารถใช้เป็นหน่วยในการวัดมุมอื่นๆ ได้
ในวิธีการวัดมุมที่ใช้กันทั่วไป มุมฉากจะถูกแบ่งออกเป็น 90 ส่วนเท่าๆ กัน เรียกว่าองศาในขณะที่ใน ระบบ เซนติซิมัล ซึ่งไม่ค่อยได้ใช้ มุมฉากจะถูกแบ่งออกเป็น 100 ส่วนเท่าๆ กัน เรียกว่าเกรเดียน[ 37 ] [ 38 ]
การวัดแบบวงกลม

ในการวัดแบบวงกลม มุมจะถูกวางไว้ภายในวงกลมที่มีขนาดใดก็ได้ โดยมีจุดยอดอยู่ที่จุดศูนย์กลางของวงกลม และด้านต่างๆ ตัดกับเส้นรอบวง
ส่วนโค้งที่มีความยาวsเกิดขึ้นจากเส้นรอบวงระหว่างจุดตัดสองจุด ซึ่งเรียกว่า ส่วนโค้ง ที่รองรับมุม ความยาวsสามารถใช้ในการวัดขนาดของมุมθ ได้ อย่างไรก็ตาม เนื่องจากsขึ้นอยู่กับขนาดของวงกลมที่เลือก การวัดจึงต้องมีการปรับขนาด ซึ่งสามารถทำได้โดยการหาอัตราส่วนของsต่อรัศมีrหรือเส้นรอบวงCของวงกลม
อัตราส่วนของความยาวsต่อรัศมีrคือจำนวนเรเดียนในมุม[ 35 ]ในขณะที่อัตราส่วนของความยาวsต่อเส้นรอบวงCคือจำนวนรอบ :



ค่าของθที่กำหนดไว้เช่นนี้จะไม่ขึ้นอยู่กับขนาดของวงกลม: ถ้าความยาวของรัศมีเปลี่ยนไป ทั้งเส้นรอบวงและความยาวส่วนโค้งก็จะเปลี่ยนไปในสัดส่วนเดียวกัน ดังนั้นอัตราส่วนส/รและส/ซีไม่มีการเปลี่ยนแปลง[ nb 1 ]
อัตราส่วนส/รเรียกว่า "การวัดเรเดียน" [ 18 ]หรือ "การวัดแบบวงกลม" [ 39 ] [ 38 ] [ 40 ]ของมุม แต่ยังใช้เพื่อกำหนดหน่วยวัดที่เรียกว่าเรเดียน ซึ่งกำหนดเป็นมุมที่มีอัตราส่วนส/ร= 1. [ 39 ]ดังนั้น การวัดมุมที่กำหนดโดยส/รสามารถคิด ได้สองวิธี: วิธีแรกคือเป็นการวัดในแง่ของสัดส่วนของมุมเอง (อัตราส่วนของความยาวส่วนโค้งต่อรัศมี) หรือวิธีที่สองคือเป็นปริมาณของหน่วยในมุม (อัตราส่วนของความยาวส่วนโค้งของมุมที่วัดได้ต่อความยาวส่วนโค้งของมุมหน่วย) [ 41 ] [ 38 ]
หน่วย
ตารางต่อไปนี้แสดงหน่วยวัดมุมที่สำคัญบางหน่วย
| ชื่อ (สัญลักษณ์) | จำนวนในตาเดียว | 1 หน่วยในหน่วยองศา | คำอธิบาย |
|---|---|---|---|
| เปลี่ยน | 1 | 360° | มุมเลี้ยวคือ มุมที่เส้นรอบวงของวงกลมทำกับจุดศูนย์กลาง มุมเลี้ยวหนึ่งมุมเท่ากับ2πหรือ𝜏เรเดียน |
| องศา (°) | 360 | 1° | อาจกำหนดองศาการหมุนได้โดยให้การหมุนหนึ่งรอบเท่ากับ360องศา |
| เรเดียน (rad) | 2π | 57.2957...° | เรเดียนคือ มุมที่เกิดจากส่วนโค้งของวงกลมที่มีความยาวเท่ากับรัศมีของวงกลม นั้น |
| บัณฑิต (กอน) | 400 | 0.9° | หน่วยวัดมุมฉาก (grad)หรือเรียกอีกอย่างว่าgrade , gradianหรือgonถูกกำหนดให้มุมฉากเท่ากับ 100 gradian หน่วย grad ส่วนใหญ่ใช้ในงานสามเหลี่ยมและงานสำรวจ ภาคพื้น ทวีป |
| นาทีอาร์ค ( ′ ) | 21,600 | 1/60 ° | นาทีของส่วนโค้ง (หรือนาทีส่วนโค้งหรือเรียกสั้น ๆ ว่านาที ) เป็นหน่วยย่อยในระบบเลขฐานหกสิบขององศา โดยทั่วไป ค่าละติจูดและลองจิจูดจะระบุเป็นองศา นาทีส่วนโค้ง และวินาทีส่วนโค้ง |
| อาร์คเซคอนด์ ( ″ ) | 1,296,000 | 1/3600 ° | วินาทีของส่วนโค้ง (หรืออาร์คเซคอนด์หรือเรียกสั้น ๆ ว่าวินาที ) เป็นหน่วยย่อยในระบบเลขฐานหกสิบของนาทีของส่วนโค้ง โดยทั่วไป ค่าละติจูดและลองจิจูดจะระบุเป็นองศา อาร์คมินิต และอาร์คเซคอนด์ |
| มิลลิเรเดียน (mrad) | 2000 π | 0.057 29 ...° | มิลลิเรเดียนคือหนึ่งในพันของเรเดียน สำหรับปืนใหญ่และการเดินเรือ จะใช้หน่วยที่เรียกว่า 'มิล' ซึ่งมีค่าประมาณเท่ากับมิลลิเรเดียน การหมุนหนึ่งรอบเท่ากับ 6000, 6300 หรือ 6400 มิล ขึ้นอยู่กับคำจำกัดความที่ใช้ |
การวิเคราะห์มิติ
ในคณิตศาสตร์และระบบปริมาณสากลมุมถูกกำหนดให้เป็นปริมาณที่ไม่มีมิติ[ 42 ]และโดยเฉพาะอย่างยิ่งเรเดียนถูกกำหนดให้เป็นปริมาณที่ไม่มีมิติในระบบหน่วยสากล [ 43 ] ข้อกำหนดนี้ป้องกันไม่ให้มุมให้ข้อมูลสำหรับการวิเคราะห์มิติตัวอย่างเช่น เมื่อวัดมุมในหน่วยเรเดียนโดยการหารความยาวส่วนโค้งด้วยรัศมี ก็คือการหารความยาวหนึ่งด้วยความยาวอีกหน่วยหนึ่ง และหน่วยความยาวจะหักล้างกัน ดังนั้นผลลัพธ์—มุม—จึงไม่มี "มิติ" ทางกายภาพเหมือนเมตรหรือวินาที[ 44 ]ข้อนี้เป็นจริงสำหรับหน่วยมุมทั้งหมด เช่น เรเดียน องศา หรือการหมุน—ทั้งหมดแสดงถึงตัวเลขบริสุทธิ์ที่วัดว่าบางสิ่งหมุนไปมากน้อยเพียงใด[ 45 ]นี่คือเหตุผลที่ในสมการหลายๆ สมการ หน่วยมุมดูเหมือนจะ "หายไป" ระหว่างการคำนวณ ซึ่งให้ความรู้สึกไม่สอดคล้องกันและอาจนำไปสู่การสับสนหน่วยมุม[ 46 ] [ 47 ]
สิ่งนี้ทำให้เกิดการอภิปรายอย่างมากในหมู่นักวิทยาศาสตร์และนักการศึกษา นักวิทยาศาสตร์บางคนเสนอให้ถือว่ามุมมีมิติพื้นฐานของตัวเอง คล้ายกับความยาวหรือเวลา[ 48 ]ซึ่งหมายความว่าหน่วยมุมเช่นเรเดียนจะปรากฏอย่างชัดเจนในการคำนวณเสมอ ทำให้การวิเคราะห์มิติทำได้ง่ายขึ้น อย่างไรก็ตาม แนวทางนี้ยังต้องเปลี่ยนแปลงสูตรทางคณิตศาสตร์และฟิสิกส์ที่รู้จักกันดีหลายสูตร ทำให้สูตรเหล่านั้นยาวขึ้นและอาจไม่คุ้นเคยมากนัก[ 49 ]สำหรับตอนนี้ แนวปฏิบัติที่ได้รับการยอมรับคือการเขียนหน่วยมุมเมื่อเหมาะสม แต่ให้ถือว่าไม่มีมิติ โดยเข้าใจว่าหน่วยเหล่านี้มีความสำคัญแต่มีพฤติกรรมที่แตกต่างจากเมตรหรือกิโลกรัม[ 50 ]
มุมที่มีเครื่องหมาย

มุมที่แสดงด้วยสัญลักษณ์∠BACอาจหมายถึงมุมใดมุมหนึ่งในสี่มุมต่อไปนี้: มุมตามเข็มนาฬิกาจาก B ไป C รอบ A, มุมทวนเข็มนาฬิกาจาก B ไป C รอบ A, มุมตามเข็มนาฬิกาจาก C ไป B รอบ A หรือมุมทวนเข็มนาฬิกาจาก C ไป B รอบ A ดังนั้นจึงมักเป็นประโยชน์ที่จะกำหนดข้อตกลงที่อนุญาตให้ใช้ค่ามุมบวกและลบเพื่อแสดงทิศทางและ/หรือการหมุนในทิศทางตรงกันข้ามหรือ "ความรู้สึก" ตรงกันข้ามกับจุดอ้างอิงบางจุด
ใน ระบบพิกัดคาร์ทีเซียนสองมิติมุมโดยทั่วไปจะถูกกำหนดโดยด้านทั้งสอง โดยมีจุดยอดอยู่ที่จุดกำเนิดด้านเริ่มต้นอยู่บนแกนx บวกในขณะที่อีกด้านหนึ่งหรือด้านปลายจะถูกกำหนดโดยการวัดจากด้านเริ่มต้นในหน่วยเรเดียน องศา หรือรอบ โดยมุมบวกแสดงถึงการหมุนเข้าหาแกน y บวกและมุมลบแสดงถึงการหมุนเข้าหาแกน y ลบเมื่อพิกัดคาร์ทีเซียนถูกแสดงด้วยตำแหน่งมาตรฐานซึ่งกำหนดโดย แกน xชี้ไปทางขวาและ แกน yชี้ขึ้น การหมุนในทิศทางบวกจะเป็นทวนเข็มนาฬิกาและการหมุนในทิศทางลบจะเป็นตามเข็ม นาฬิกา
ในหลายบริบท มุม −θ นั้นเทียบเท่ากับมุม "หนึ่งรอบเต็มลบด้วยθ " ตัวอย่างเช่น การวางแนวที่แสดงเป็น −45° นั้นเทียบเท่ากับการวางแนวที่กำหนดเป็น360° −45°หรือ 315° แม้ว่าตำแหน่งสุดท้ายจะเหมือนกัน แต่การหมุน (การเคลื่อนไหว) ทางกายภาพที่ −45° นั้นไม่เหมือนกับการหมุนที่ 315° (ตัวอย่างเช่น การหมุนของคนที่ถือไม้กวาดวางอยู่บนพื้นที่มีฝุ่น จะทิ้งร่องรอยของบริเวณที่กวาดแล้วบนพื้นแตกต่างกันอย่างเห็นได้ชัด)
ในเรขาคณิตสามมิติ คำว่า "ตามเข็มนาฬิกา" และ "ทวนเข็มนาฬิกา" ไม่มีความหมายที่แน่นอน ดังนั้นทิศทางของมุมบวกและมุมลบจึงต้องกำหนดในแง่ของการวางแนวซึ่งโดยทั่วไปจะกำหนดโดยเวกเตอร์ปกติที่ผ่านจุดยอดของมุมและตั้งฉากกับระนาบที่รังสีของมุมนั้นอยู่
ในการนำทาง มุมแบริ่งหรือ มุม อะซิมุธจะวัดเทียบกับทิศเหนือ ตามธรรมเนียมแล้ว เมื่อมองจากด้านบน มุมแบริ่งจะเป็นบวกเมื่อหมุนตามเข็มนาฬิกา ดังนั้นมุมแบริ่ง 45° จึงตรงกับทิศตะวันออกเฉียงเหนือ มุมแบริ่งที่เป็นลบจะไม่ใช้ในการนำทาง ดังนั้นทิศตะวันตกเฉียงเหนือจึงตรงกับมุมแบริ่ง 315°
มุมที่เท่ากัน
- มุมที่มีขนาดเท่ากัน (กล่าวคือ มีขนาดเท่ากัน) เรียกว่ามุมเท่ากันหรือ มุม ที่สมมาตรกัน มุมถูกกำหนดโดยขนาดของมัน และไม่ขึ้นอยู่กับความยาวของด้านของมุม (เช่นมุมฉากทุกมุมมีขนาดเท่ากัน)
- มุมสองมุมที่ใช้ด้านปลายร่วมกัน แต่มีขนาดแตกต่างกันโดยเป็นผลคูณจำนวนเต็มของจำนวนรอบ เรียกว่ามุมร่วมปลาย (coterminal angles )
- มุมอ้างอิง (บางครั้งเรียกว่ามุมที่เกี่ยวข้อง ) สำหรับมุมθ ใดๆ ในตำแหน่งมาตรฐานคือมุมแหลมบวกระหว่างด้านปลายของθและแกน x (บวกหรือลบ) [ 51 ]ในทางขั้นตอน ขนาดของมุมอ้างอิงสำหรับมุมที่กำหนดอาจถูกกำหนดโดยการนำขนาดของมุมมาหารด้วยค่าโมดูลัส1/2หมุน 180° หรือπเรเดียน แล้วหยุดถ้ามุมเป็นมุมแหลม มิฉะนั้นให้ใช้มุมเสริม คือ 180° ลบด้วยขนาดที่ลดลง ตัวอย่างเช่น มุม 30 องศาเป็นมุมอ้างอิงอยู่แล้ว และมุม 150 องศาก็มีมุมอ้างอิง 30 องศาเช่นกัน ( 180° − 150° ) มุม 210° และ 510° ก็สอดคล้องกับมุมอ้างอิง 30 องศาเช่นกัน ( 210° mod 180° = 30° , 510° mod 180° = 150°ซึ่งมุมเสริมคือ 30°)
ปริมาณที่เกี่ยวข้อง
สำหรับหน่วยเชิงมุมนั้น ตามนิยามแล้วสัจพจน์การบวกมุมนั้นใช้ได้ แต่มีการวัดหรือปริมาณบางอย่างที่เกี่ยวข้องกับมุมที่ใช้กันอยู่ซึ่งไม่เป็นไปตามสัจพจน์นี้:
- ความชันหรือความลาดเอียงเท่ากับค่าแทนเจนต์ของมุม และมักแสดงเป็นเปอร์เซ็นต์ ("ระยะทางขึ้น" ต่อ "ระยะทางลง") สำหรับค่าที่น้อยมาก (น้อยกว่า 5%) ความชันของเส้นตรงจะประมาณเท่ากับค่ามุมที่วัดเป็นเรเดียนกับทิศทางแนวนอนระดับความสูงเป็นความชันที่ใช้ระบุความลาดชันของถนน ทางเดิน และทางรถไฟ
- ใน เรขาคณิตเชิงตรรกะระยะห่างระหว่างเส้นตรงสองเส้นถูกนิยามว่าเท่ากับกำลังสองของไซน์ของมุมระหว่างเส้นตรงทั้งสอง เนื่องจากไซน์ของมุมและไซน์ของมุมเสริมของมุมนั้นมีค่าเท่ากัน ดังนั้นมุมการหมุนใดๆ ที่เปลี่ยนเส้นตรงเส้นหนึ่งไปเป็นอีกเส้นหนึ่ง จะทำให้ได้ค่าระยะห่างระหว่างเส้นตรงทั้งสองเส้นเท่ากัน
- ถึงแม้ว่าจะทำไม่บ่อยนัก แต่เราสามารถรายงานผลลัพธ์โดยตรงของฟังก์ชันตรีโกณมิติได้ เช่นค่าไซน์ของมุม
มุมระหว่างเส้นโค้ง

มุมระหว่างเส้นตรงและเส้นโค้ง (มุมผสม) หรือระหว่างเส้นโค้งสองเส้นที่ตัดกัน (มุมเส้นโค้ง) ถูกกำหนดให้เป็นมุมระหว่างเส้นสัมผัสณ จุดตัด มีชื่อเรียกต่างๆ (ปัจจุบันแทบไม่เคยใช้เลย) ที่ใช้เรียกกรณีเฉพาะต่างๆ ได้แก่:— amphicyrtic (กรีกἀμφί , ทั้งสองด้าน, κυρτός, นูน) หรือcissoidal (กรีก κισσός, ไม้เลื้อย), นูนสองด้าน; xystroidalหรือsistroidal (กรีก ξυστρίς, เครื่องมือสำหรับขูด), เว้า-นูน; amphicoelic (กรีก κοίλη, โพรง) หรือangulus lunularis , เว้าสองด้าน[ 52 ]
การแบ่งครึ่งมุมและการแบ่งสามส่วนมุม
นักคณิตศาสตร์ชาวกรีกโบราณรู้วิธีแบ่งมุมออกเป็นสองมุมที่มีขนาดเท่ากันโดยใช้เพียงวงเวียนและไม้บรรทัดแต่สามารถแบ่งมุมบางมุมออกเป็นสามส่วนได้เท่านั้น ในปี ค.ศ. 1837 ปิแอร์ วอนต์เซลได้แสดงให้เห็นว่าวิธีการนี้ไม่สามารถทำได้กับมุมส่วนใหญ่
ผลคูณดอทและการสรุปทั่วไป
ในปริภูมิยูคลิดมุมθระหว่างเวกเตอร์ยูคลิดuและv สองตัว มีความสัมพันธ์กับผลคูณดอทและความยาวของเวกเตอร์ทั้งสองโดยสูตร

สูตรนี้เป็นวิธีง่ายๆ ในการหาค่ามุมระหว่างระนาบสองระนาบ (หรือพื้นผิวโค้ง) จากเวกเตอร์ตั้งฉากและระหว่างเส้นเฉียงจากสมการเวกเตอร์
ผลิตภัณฑ์ภายใน
ในการกำหนดมุมในปริภูมิ ผลคูณภายในเชิงนามธรรมของจำนวนจริงเราจะแทนที่ผลคูณดอทแบบยุคลิด ( · ) ด้วยผลคูณภายในนั่นคือ


ในปริภูมิผลคูณภายใน ที่ซับซ้อน นิพจน์สำหรับโคไซน์ข้างต้นอาจให้ค่าที่ไม่ใช่จำนวนจริง ดังนั้นจึงต้องแทนที่ด้วย หรือที่นิยมใช้มากกว่าคือการใช้ค่าสัมบูรณ์


นิยามหลังนี้ละเลยทิศทางของเวกเตอร์ ดังนั้นจึงอธิบายมุมระหว่างปริภูมิย่อยหนึ่งมิติที่เกิดจากเวกเตอร์และตามลำดับ




มุมระหว่างปริภูมิย่อย
นิยามของมุมระหว่างปริภูมิย่อยหนึ่งมิติและที่กำหนดโดย ในปริภูมิฮิลเบิร์ตสามารถขยายไปสู่ปริภูมิย่อยที่มีจำนวนมิติจำกัดได้ เมื่อกำหนดปริภูมิย่อยสองปริภูมิและโดยที่ จะนำไปสู่นิยามของมุมที่เรียกว่ามุมมาตรฐานหรือมุมหลักระหว่างปริภูมิย่อย





มุมในเรขาคณิตแบบรีมันน์
ในเรขาคณิตแบบรีมันน์เมตริกเทนเซอร์ใช้ในการกำหนดมุมระหว่างเส้นสัมผัส สองเส้น โดยที่UและVคือเวกเตอร์สัมผัส และg ijคือส่วนประกอบของเมตริกเทนเซอร์ G

มุมไฮเปอร์โบลิก

มุมไฮเปอร์โบลิกเป็นอาร์กิวเมนต์ของฟังก์ชันไฮเปอร์โบลิกเช่นเดียวกับมุมวงกลมเป็นอาร์กิวเมนต์ของฟังก์ชันวงกลมการเปรียบเทียบสามารถมองเห็นได้เป็นขนาดของช่องเปิดของภาคไฮเปอร์โบลิกและภาควงกลมเนื่องจากพื้นที่ของภาคเหล่านี้สอดคล้องกับขนาดของมุมในแต่ละกรณี[ 53 ]ต่างจากมุมวงกลม มุมไฮเปอร์โบลิกไม่มีขอบเขต เมื่อมองฟังก์ชันวงกลมและไฮเปอร์โบลิกเป็นอนุกรมอนันต์ในอาร์กิวเมนต์มุม ฟังก์ชันวงกลมจะเป็นเพียง รูปแบบ อนุกรมสลับของฟังก์ชันไฮเปอร์โบลิก การเปรียบเทียบอนุกรมทั้งสองที่สอดคล้องกับฟังก์ชันของมุมนี้ได้รับการอธิบายโดยเลออนฮาร์ด ออยเลอร์ในบทนำสู่การวิเคราะห์อนันต์ (1748)
ประวัติศาสตร์และรากศัพท์
คำว่าangleมาจากคำภาษาละตินangulusซึ่งหมายถึง "มุม" คำที่ เกี่ยวข้อง ได้แก่ คำ ภาษากรีกἀγκύλος ( ankylοs ) ซึ่งหมายถึง "คดงอ โค้งงอ" และ คำภาษา อังกฤษ " ankle " ทั้งสองคำเชื่อมโยงกับรากศัพท์ภาษาโปรโตอินโด-ยุโรป*ank-ซึ่งหมายถึง "งอ" หรือ "โค้งงอ" [ 54 ]
นักปรัชญาถกเถียงกันถึงธรรมชาติของมุมมานานนับพันปี โดยบางคนแย้งว่ามุมเป็นการวัด (ปริมาณ) ในขณะที่บางคนกล่าวว่ามุมเป็นรูปร่างชนิดหนึ่งที่กำหนดโดยเส้นที่ล้อมรอบ (ความสัมพันธ์เชิงคุณภาพ) และบางคนก็กล่าวว่ามุมเป็นทั้งสองอย่าง[ 55 ]ในเชิงการสอน คำตอบที่ยอมรับกันคือ มุมถูกกำหนดให้เป็นรูปทรง และการวัดมุมถูกกำหนดให้เป็นจำนวนสำเนาที่ไม่ทับซ้อนกันที่เท่ากันทุกประการของมุมหน่วยที่จำเป็นในการครอบคลุมมุมและพื้นที่ภายใน มุมต่างๆ กล่าวได้ว่ามีขนาดเท่ากันและมีรูปร่างคล้ายกันหรือเท่ากันทุก ประการ [ 56 ]
ยูคลิดนิยามมุมระนาบว่าเป็นการเอียงระหว่างเส้นตรงสองเส้นที่ตัดกันในระนาบเดียวกันและไม่ได้วางตัวตรงต่อกัน ตามที่โพรคลัส นักปรัชญาแนวนีโอเพลโตนิค กล่าวไว้ มุมจะต้องเป็นคุณสมบัติ ปริมาณ หรือความสัมพันธ์ แนวคิดแรก มุมในฐานะคุณสมบัติ ถูกใช้โดยยูเดมัสแห่งโรดส์ซึ่งมองว่ามุมเป็นการเบี่ยงเบนจากเส้นตรงแนวคิดที่สอง มุมในฐานะปริมาณ ถูกใช้โดยคาร์ปัสแห่งแอนติโอคซึ่งมองว่ามุมเป็นช่วงหรือช่องว่างระหว่างเส้นที่ตัดกัน ยูคลิดได้นำแนวคิดที่สามมาใช้ คือ มุมในฐานะความสัมพันธ์[ 57 ]
ทฤษฎีมุมตรงข้าม
ความเท่ากันของมุมตรงข้ามเรียกว่าทฤษฎีบทมุมตรงข้ามยูเดมัสแห่งโรดส์ได้ยกให้ธาเลสแห่งมิเลตุสเป็น ผู้พิสูจน์ [ 58 ] [ 23 ]ข้อเสนอนี้แสดงให้เห็นว่าเนื่องจากมุมตรงข้ามทั้งสองมุมรวมกันได้ 180 องศาของมุมประชิดทั้งสองมุม มุมตรงข้ามจึงมีขนาดเท่ากัน ตามบันทึกทางประวัติศาสตร์[ 23 ]เมื่อธาเลสไปเยือนอียิปต์ เขาได้สังเกตว่าเมื่อใดก็ตามที่ชาวอียิปต์ลากเส้นตัดกันสองเส้น พวกเขาจะวัดมุมตรงข้ามเพื่อให้แน่ใจว่ามุมทั้งสองเท่ากัน ธาเลสสรุปว่าสามารถพิสูจน์ได้ว่ามุมตรงข้ามทั้งหมดเท่ากันหากยอมรับแนวคิดทั่วไปบางประการ เช่น:
- มุมตรงทุกมุมมีขนาดเท่ากัน
- สิ่งที่เท่ากันบวกกับสิ่งที่เท่ากัน ย่อมเท่ากัน
- สิ่งที่เท่ากัน ลบออกจากสิ่งที่เท่ากัน ก็จะได้ผลลัพธ์ที่เท่ากัน
เมื่อมุมประชิดสองมุมก่อให้เกิดเส้นตรงเดียวกัน มุมทั้งสองนั้นจะเป็นมุมเสริมกัน ดังนั้น ถ้าเราสมมติว่าขนาดของมุมAเท่ากับxขนาดของมุมCจะเท่ากับ180° − xในทำนองเดียวกัน ขนาดของมุมDก็จะ เท่ากับ 180° − xทั้งมุมCและมุมDมีขนาดเท่ากับ180° − xและมีขนาดเท่ากัน เนื่องจากมุมBเป็นมุมเสริมกันของทั้งมุมCและมุม Dเราจึงสามารถใช้ขนาดของมุมใดมุมหนึ่งในการหาขนาดของมุมBได้ โดยใช้ขนาดของมุมCหรือมุมDเราจะพบว่าขนาดของมุมBเท่ากับ180° − (180° − x ) = xดังนั้น ทั้งมุมAและมุมBมีขนาดเท่ากับxและมีขนาดเท่ากัน
มุมมองในทางภูมิศาสตร์และดาราศาสตร์
ในทางภูมิศาสตร์ตำแหน่งของจุดใดๆ บนโลกสามารถระบุได้โดยใช้ระบบพิกัดทางภูมิศาสตร์ระบบนี้ระบุละติจูดและลองจิจูดของตำแหน่งใดๆ ในรูปของมุมที่ทำกับจุดศูนย์กลางของโลก โดยใช้เส้นศูนย์สูตรและ (โดยปกติ) เส้นเมริเดียนกรีนิชเป็นจุดอ้างอิง
ในทางดาราศาสตร์จุดใดจุดหนึ่งบนทรงกลมท้องฟ้า (กล่าวคือ ตำแหน่งปรากฏของวัตถุทางดาราศาสตร์) สามารถระบุได้โดยใช้ระบบพิกัดทางดาราศาสตร์ หลายระบบ โดยที่จุดอ้างอิงจะแตกต่างกันไปตามระบบนั้นๆ นักดาราศาสตร์วัดระยะห่างเชิงมุมระหว่างดาว สองดวง โดยจินตนาการถึงเส้นตรงสองเส้นที่ลากผ่านศูนย์กลางของโลกโดยแต่ละเส้นตัดกับดาวดวงหนึ่ง มุมระหว่างเส้นตรงเหล่านั้นและระยะห่างเชิงมุมระหว่างดาวสองดวงสามารถวัดได้
ทั้งในทางภูมิศาสตร์และดาราศาสตร์ ทิศทางการสังเกตการณ์สามารถระบุได้ในแง่ของมุมแนวตั้งเช่นมุมเงยหรือมุมระดับ ความสูง เทียบกับเส้นขอบฟ้ารวมถึงมุมอะซิมุธเทียบกับทิศ เหนือ
นักดาราศาสตร์ยังวัดขนาดปรากฏ ของวัตถุ โดยใช้เส้นผ่านศูนย์กลางเชิงมุมด้วย ตัวอย่างเช่นดวงจันทร์เต็มดวงมีเส้นผ่านศูนย์กลางเชิงมุมประมาณ 0.5° หรือ 30 ลิปดา เมื่อมองจากโลก เราอาจกล่าวได้ว่า "เส้นผ่านศูนย์กลางของดวงจันทร์รองรับมุมครึ่งองศา" สูตรมุมเล็กสามารถแปลงการวัดเชิงมุมดังกล่าวให้เป็นอัตราส่วนระยะทางต่อขนาดได้
การประมาณค่าทางดาราศาสตร์อื่นๆ ได้แก่:
- 0.5° คือเส้นผ่านศูนย์กลางเชิงมุมโดยประมาณของดวงอาทิตย์และดวงจันทร์เมื่อมองจากโลก
- 1° คือความกว้างเชิงมุมโดยประมาณของนิ้วก้อยเมื่อเหยียดแขนออกไปจนสุด
- 10 องศา คือมุมโดยประมาณของกำปั้นที่ปิดสนิทเมื่อยื่นออกไปจนสุดแขน
- 20° คือมุมกว้างโดยประมาณของช่วงมือเมื่อยื่นแขนออกไปจนสุด
การวัดเหล่านี้ขึ้นอยู่กับแต่ละบุคคล และข้อมูลข้างต้นควรใช้เป็นเพียงค่าประมาณ คร่าวๆ เท่านั้น
ในทางดาราศาสตร์ค่าไรต์แอสเซนชันมักจะวัดเป็นหน่วยเชิงมุมที่แสดงออกมาในรูปของเวลาโดยอิงจากวัน 24 ชั่วโมง[ 59 ]
| หน่วย | เครื่องหมาย | ปริญญา | เรเดียนส์ | เลี้ยว | อื่น |
|---|---|---|---|---|---|
| ชั่วโมง | ชม. | 15° | π ⁄ 12เรเดียน | 1/24รอบ | |
| นาที | ม | 0°15′ | π ⁄ 720เรเดียน | 1 ⁄รอบที่ 1440 | 1/60ชั่วโมง |
| ที่สอง | ส | 0°0′15″ | π ⁄43 200เรเดียน | 1 ⁄86 400รอบ | 1/60นาที |
ดูเพิ่มเติม
- การหมุน 2 มิติ
- การหมุน 3 มิติ
- การหมุน 4 มิติ
- เครื่องมือวัดมุม
- มุมระหว่างระนาบ
- สถิติเชิงมุม ( ค่าเฉลี่ย , ส่วนเบี่ยงเบนมาตรฐาน )
- เส้นแบ่งครึ่งมุม
- ความเร่งเชิงมุม
- เส้นผ่านศูนย์กลางเชิงมุม
- ความเร็วเชิงมุม
- การโต้แย้ง (การวิเคราะห์เชิงซับซ้อน)
- แง่มุมทางโหราศาสตร์
- มุมกลาง
- ปัญหาเรื่องมุมนาฬิกา
- องศาทศนิยม
- มุมไดเฮดรัล
- ทฤษฎีมุมภายนอก
- มุมทองคำ
- ระยะทางวงกลมใหญ่
- มุมเขา
- มุมที่จารึกไว้
- มุมอตรรกยะ
- เฟส (คลื่น)
- ไม้โปรแทรกเตอร์
- มุมตัน
- มุมทรงกลม
- มุมที่รองรับ
- มุมสัมผัส
- มุมเหนือธรรมชาติ
- การแบ่งสามส่วน
- มุมสูงสุด
หมายเหตุ
- ^อย่างไรก็ตาม วิธีการนี้ต้องการการพิสูจน์เพิ่มเติมว่าขนาดของมุมไม่เปลี่ยนแปลงเมื่อรัศมี r เปลี่ยนไป นอกเหนือจากปัญหาเรื่อง "หน่วยวัดที่เลือก" วิธีการที่ราบรื่นกว่าคือการวัดมุมโดยใช้ความยาวของส่วนโค้งวงกลมหน่วยที่สอดคล้องกัน ในที่นี้ "หน่วย" สามารถเลือกให้เป็นหน่วยไร้มิติได้ในแง่ที่ว่ามันคือจำนวนจริง 1 ที่เกี่ยวข้องกับส่วนของเส้นตรงหน่วยบนเส้นจำนวนจริง ดู Dimitrić (2012)เป็นตัวอย่าง
- ^สามารถสร้างภาคส่วนเชิงมุมได้โดยการรวมกันของระนาบครึ่ง ที่หมุนสองระนาบ ไม่ว่าจะเป็นจุดตัดหรือการรวมกัน (ในกรณีของมุมแหลมหรือมุมป้านตามลำดับ) [ 9 ] [ 10 ]ซึ่งสอดคล้องกับภาคส่วนวงกลมที่มีรัศมีอนันต์และเส้นครึ่งแบน [ 11 ]
บรรณานุกรม
- Aboughantous, Charles H. (2010), หลักสูตรเบื้องต้นเรขาคณิตระนาบยุคลิดสำหรับนักเรียนมัธยมปลาย , สำนักพิมพ์ Universal Publishers, ISBN 978-1-59942-822-2
- Dimitrić, Radoslav M. (2012), "เกี่ยวกับมุมและการวัดมุม" (PDF) , การสอนคณิตศาสตร์ , XV (2): 133– 140, เก็บถาวร(PDF)จากต้นฉบับเมื่อ 2019-01-17 , เรียกดูเมื่อ 2019-08-06
- ก็อดฟรีย์, ชาร์ลส์; ซิดดอนส์, เอ.ดับบลิว. (1919), เรขาคณิตเบื้องต้น: ภาคปฏิบัติและภาคทฤษฎี (ฉบับที่ 3), สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์
- เฮนเดอร์สัน, เดวิด ดับเบิลยู; ไทมินา, ไดนา (2005), การสัมผัสประสบการณ์เรขาคณิต / เรขาคณิตแบบยุคลิดและแบบไม่ยุคลิดพร้อมประวัติศาสตร์ (ฉบับที่ 3), เพียร์สัน เพรนติส ฮอลล์, หน้า 104, ISBN 978-0-13-143748-7
- ไฮเบิร์ก, โยฮัน ลุดวิก (1908), ฮีธ, ทีแอล (บรรณาธิการ), ยูคลิด , หนังสือ 13 เล่มขององค์ประกอบของยูคลิด, เล่ม 1, เคมบริดจ์ : สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์.
- จาคอบส์, ฮาโรลด์ อาร์. (1974), เรขาคณิต , ดับเบิลยูเอช ฟรีแมน, หน้า 97, 255, ISBN 978-0-7167-0456-0
- โมเซอร์, เจมส์ เอ็ม. (1971), เรขาคณิตเบื้องต้นสมัยใหม่ , เพรนติส-ฮอลล์
- Sidorov, LA (2001) [1994], "มุม" , สารานุกรมคณิตศาสตร์ , EMS Press
- Slocum, Jonathan (2007), พจนานุกรมอินโด-ยุโรปเบื้องต้น — ข้อมูล Pokorny PIE , ภาควิจัย มหาวิทยาลัยเท็กซัส: ศูนย์วิจัยภาษาศาสตร์ , เก็บถาวรจากต้นฉบับเมื่อ 27 มิถุนายน 2010 , เรียกดูเมื่อ 2 กุมภาพันธ์ 2010
- Shute, William G.; Shirk, William W.; Porter, George F. (1960), เรขาคณิตระนาบและเรขาคณิตทรงสามมิติ , American Book Company, หน้า 25–27
- หว่อง ตั๊ก-วาห์; หว่อง หมิง-ซิม (2009), "มุมในเส้นตัดและเส้นขนาน", คณิตศาสตร์ศตวรรษใหม่ , เล่ม 1B (ฉบับที่ 1), ฮ่องกง: สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด, หน้า 161–163 , ISBN 978-0-19-800177-5
บทความนี้ได้นำข้อความจากสิ่งพิมพ์ที่อยู่ในสาธารณสมบัติ มาใช้ : Chisholm, Hugh , ed. (1911), " Angle ", Encyclopædia Britannica , vol. 2 (ฉบับที่ 11), Cambridge University Press, หน้า 14
อ่านเพิ่มเติม
- Brinsmade, JB (1936), "มุมระนาบและมุมตัน คุณค่าทางการสอนเมื่อมีการแนะนำอย่างชัดเจน", American Journal of Physics , 4 (4): 175– 179, doi : 10.1119/1.1999110
- Brownstein, KR (1997), "มุม—มาพิจารณามุมเหล่านั้นอย่างตรงไปตรงมากันเถอะ" , American Journal of Physics , 65 (7): 605– 614, doi : 10.1119/1.18616
- Eder, WE (1982), "มุมมองเกี่ยวกับปริมาณ "มุมระนาบ"", มาตรโลเกีย , 18 (1): 1– 12, ดอย : 10.1088/0026-1394/18/1/002
- Foster, Marcus P. (2010), "50 ปีข้างหน้าของ SI: การทบทวนโอกาสสำหรับยุควิทยาศาสตร์อิเล็กทรอนิกส์" , Metrologia , 47 (6): R41– R51, doi : 10.1088/0026-1394/47/6/R01 , เก็บถาวรจากต้นฉบับเมื่อ 2023-11-10 , เรียกดูเมื่อ 2023-11-08
- Leonard, BP (2021), "ข้อเสนอสำหรับการจัดการมุมและมุมตันให้สอดคล้องกันทางมิติโดยระบบหน่วยสากล (SI)", Metrologia , 58 (5): 052001, doi : 10.1088/1681-7575/abe0fc
- Lévy-Leblond, Jean-Marc (1998), "มุมมิติและค่าคงที่สากล", American Journal of Physics , 66 (9): 814– 815, doi : 10.1119/1.18964 , ResearchGate 253371022
- Mills, Ian (2016), "เกี่ยวกับหน่วยเรเดียนและวัฏจักรสำหรับมุมระนาบปริมาณ", Metrologia , 53 (3): 991– 997, doi : 10.1088/0026-1394/53/3/991
- มอร์, ปีเตอร์ เจ.; Phillips, William D. (2015), "หน่วยไร้มิติใน SI" , Metrologia , 52 (1): 40– 47, arXiv : 1409.2794 , doi : 10.1088/0026-1394/52/1/40
- Mohr, Peter J.; Shirley, Eric L.; Phillips, William D.; Trott, Michael (2022), "เกี่ยวกับมิติของมุมและหน่วยของมุม" , Metrologia , 59 (5): 053001, arXiv : 2203.12392 , doi : 10.1088/1681-7575/ac7bc2
- Quincey, Paul (2016), "ช่วงของตัวเลือกสำหรับการจัดการมุมระนาบและมุมตันภายในระบบหน่วย", Metrologia , 53 (2): 840– 845, doi : 10.1088/0026-1394/53/2/840
- Romain, Jacques E. (1962), "มุมเป็นปริมาณพื้นฐานที่สี่" , วารสารการวิจัยของสำนักงานมาตรฐานแห่งชาติ ส่วน B , 66B (3): 97, doi : 10.6028/jres.066B.012
- Torrens, AB (1986), "เกี่ยวกับมุมและปริมาณเชิงมุม", Metrologia , 22 (1): 1– 7, doi : 10.1088/0026-1394/22/1/002
ลิงก์ภายนอก
- , Encyclopædia Britannica , เล่ม 2 (ฉบับที่ 9), 1878, หน้า 29–30
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ มุม
ในทางเรขาคณิตมุมเกิดจากเส้นตรง สองเส้น ที่มาบรรจบกันที่จุดหนึ่งแต่ละเส้นเรียกว่าด้านของมุม และจุดที่เส้นทั้งสองมาบรรจบกันเรียกว่าจุดยอดของมุม
หลักการพื้นฐาน
ไม่มีคำจำกัดความของมุมที่เป็นที่ยอมรับกันโดยทั่วไป [ 4 ] มุมสามารถถูกคิดและใช้งานได้หลากหลายวิธี และในขณะที่อาจมีการกำหนดคำจำกัดความที่ถูกต้องสำหรับบริบทเฉพาะ...
สัญลักษณ์และการวัด
สัญลักษณ์มุม ( หรืออ่านว่า "มุม") พร้อมด้วยจุดกำหนดหนึ่งหรือสามจุด ใช้เพื่อระบุมุมในรูปทรงเรขาคณิต ตัวอย่างเช่น มุมที่มีจุดยอด A ซึ่งเกิดจาก รังสี และจะใช้สัญลักษณ์(โดยใช้จุดยอดเพียงอย่างเดียว) หรือ (โดยระบุจุดยอด ไว้ ตรงกลางเสมอ)...
หน่วยวัด
มุมจะถูกวัดด้วยหน่วยต่างๆ หน่วยที่ใช้กันทั่วไปคือ องศา (แทนด้วยสัญลักษณ์ ° ) เรเดียน (แทนด้วยสัญลักษณ์ rad ) และ การหมุน หน่วยเหล่านี้แตกต่างกันในวิธีการแบ่ง มุมเต็ม ซึ่งเป็นมุมที่รังสีหนึ่งซึ่งเดิมเท่ากันกับรังสีอีกอันหนึ่ง หมุนรอบจุดยอดจนกลับมาอยู่ที่...