อ่าน 28 นาที
จลนศาสตร์
จลนศาสตร์ เป็นสาขาย่อยของ ฟิสิกส์ และเป็นสาขาหนึ่งของ เรขาคณิต ในฟิสิกส์ จลนศาสตร์ศึกษาลักษณะทางเรขาคณิตของการเคลื่อนที่ของวัตถุทางกายภาพโดยไม่ขึ้นอยู่กับแรงที่ทำให้เกิดการเคลื่อนท...
จลนศาสตร์
| ส่วนหนึ่งของชุดบทความเกี่ยวกับ |
| กลศาสตร์คลาสสิก |
|---|
|

จลนศาสตร์เป็นสาขาย่อยของฟิสิกส์และเป็นสาขาหนึ่งของเรขาคณิตในฟิสิกส์ จลนศาสตร์ศึกษาลักษณะทางเรขาคณิตของการเคลื่อนที่ของวัตถุทางกายภาพโดยไม่ขึ้นอยู่กับแรงที่ทำให้เกิดการเคลื่อนที่ การเคลื่อนที่แบบจำกัด เช่น ชิ้นส่วนเครื่องจักรที่เชื่อมต่อกัน ก็ถูกอธิบายว่าเป็นจลนศาสตร์เช่นกัน ในเรขาคณิต จลนศาสตร์ศึกษาการพึ่งพาเวลาของปริมาณทางเรขาคณิต เช่นตำแหน่งระยะทาง และขนาดเชิงมุม เทียบกับกรอบอ้างอิงโดยส่วนใหญ่แล้ว ปริมาณที่จลนศาสตร์เกี่ยวข้องคืออนุพันธ์เทียบกับเวลาของปริมาณเหล่านี้และความสัมพันธ์ระหว่างกัน วัตถุที่ศึกษาการเคลื่อนที่ ได้แก่ จุดและเซตย่อยของปริภูมิยูคลิดที่เคลื่อนที่ แบบแข็งตัว
จลศาสตร์เกี่ยวข้องกับระบบการกำหนดตำแหน่งและความเร็วของวัตถุ และการแปลงทางคณิตศาสตร์ระหว่างระบบเหล่านั้น ระบบเหล่านี้อาจเป็นระบบพิกัดสี่เหลี่ยม เช่นพิกัดคาร์ทีเซียนระบบพิกัดโค้งเช่นพิกัดเชิงขั้วหรือระบบอื่นๆ วิถีการเคลื่อนที่ของวัตถุอาจถูกกำหนดโดยสัมพันธ์กับวัตถุอื่นๆ ซึ่งอาจเคลื่อนที่สัมพันธ์กับจุดอ้างอิงมาตรฐาน ระบบการหมุนก็อาจถูกนำมาใช้เช่นกัน
ปัญหาเชิงปฏิบัติมากมายในจลศาสตร์เกี่ยวข้องกับข้อจำกัดต่างๆ เช่น กลไกเชื่อมโยง เชือก หรือแผ่นดิสก์กลิ้ง
ภาพรวม
จลนศาสตร์เป็นสาขาย่อยของฟิสิกส์และคณิตศาสตร์ที่พัฒนาขึ้นในกลศาสตร์คลาสสิกซึ่งอธิบายการเคลื่อนที่ของจุดวัตถุและระบบของวัตถุ (กลุ่มของวัตถุ) โดยไม่พิจารณาแรงที่ทำให้วัตถุเคลื่อนที่[ 1 ] [ 2 ] [ 3 ] จลนศาสตร์แตกต่างจากพลศาสตร์ (หรือที่เรียกว่าจลนพลศาสตร์ ) ซึ่งศึกษาผลของแรงต่อวัตถุ
จลนพลศาสตร์ ในฐานะสาขาวิชา มักถูกเรียกว่า "เรขาคณิตของการเคลื่อนที่" และบางครั้งก็ถูกมองว่าเป็นสาขาหนึ่งของทั้งคณิตศาสตร์ประยุกต์และคณิตศาสตร์ บริสุทธิ์ เนื่องจากสามารถศึกษาได้โดยไม่ต้องพิจารณามวลของวัตถุหรือแรงที่กระทำต่อวัตถุ[ 4 ] [ 5 ] [ 6 ]ปัญหาจลนพลศาสตร์เริ่มต้นด้วยการอธิบายเรขาคณิตของระบบและประกาศเงื่อนไขเริ่มต้นของค่าตำแหน่ง ความเร็ว และ/หรือความเร่งที่ทราบของจุดต่างๆ ภายในระบบ จากนั้น โดยใช้เหตุผลจากเรขาคณิต ตำแหน่ง ความเร็ว และความเร่งของส่วนที่ไม่ทราบของระบบสามารถกำหนดได้ ในงานเขียนเรื่องSpace and its NatureนักวิชาการIbn al-Haythamได้รับการยกย่องว่าเป็นคนแรกที่ถือว่าเรขาคณิตและจลนพลศาสตร์เป็นแนวคิดเดียวกัน เพื่อหาปริมาณคุณสมบัติของพื้นที่ เขาเปรียบเทียบมิติของวัตถุเมื่อมันเคลื่อนที่กับเมื่อมันหยุดนิ่ง[ 7 ]
อีกวิธีหนึ่งในการอธิบายจลนศาสตร์คือการกำหนดสถานะที่เป็นไปได้ของระบบทางกายภาพ พลศาสตร์จึงอธิบายวิวัฒนาการของระบบผ่านสถานะดังกล่าวโรเบิร์ต สเปกเคนส์โต้แย้งว่าการแบ่งแยกนี้ไม่สามารถทดสอบเชิงประจักษ์ได้ ดังนั้นจึงไม่มีพื้นฐานทางกายภาพ[ 8 ]
จลนพลศาสตร์ใช้ในฟิสิกส์ดาราศาสตร์เพื่ออธิบายการเคลื่อนที่ของวัตถุท้องฟ้าและกลุ่มของวัตถุดังกล่าว ในวิศวกรรมเครื่องกลหุ่นยนต์และชีวกลศาสตร์ [ 9 ] จลนพลศาสตร์ใช้เพื่ออธิบายการเคลื่อนที่ของระบบที่ประกอบด้วยชิ้นส่วนที่เชื่อมต่อกัน (ระบบหลายข้อต่อ) เช่นเครื่องยนต์แขนหุ่นยนต์หรือโครงกระดูก มนุษย์
การแปลงทางเรขาคณิตรวมถึงการแปลงแบบแข็ง (rigid transformations ) ถูกนำมาใช้เพื่ออธิบายการเคลื่อนที่ของส่วนประกอบในระบบกลไกทำให้การหาอนุพันธ์ของสมการการเคลื่อนที่ง่ายขึ้น นอกจากนี้ยังเป็นหัวใจสำคัญของการวิเคราะห์พลศาสตร์ อีก ด้วย
การวิเคราะห์จลนศาสตร์คือกระบวนการวัดปริมาณ จลนศาสตร์ ที่ใช้ในการอธิบายการเคลื่อนที่ ในทางวิศวกรรม ตัวอย่างเช่น การวิเคราะห์จลนศาสตร์อาจใช้เพื่อหาช่วงการเคลื่อนที่ของกลไก ที่กำหนด และในทางกลับกัน ใช้การสังเคราะห์จลนศาสตร์เพื่อออกแบบกลไกสำหรับช่วงการเคลื่อนที่ที่ต้องการ[ 10 ] นอกจากนี้ จลนศาสตร์ยังใช้เรขาคณิตเชิงพีชคณิตในการศึกษาข้อได้เปรียบเชิงกลของระบบหรือกลไก เชิงกล
จลนพลศาสตร์เชิงสัมพัทธภาพใช้ทฤษฎีสัมพัทธภาพพิเศษกับเรขาคณิตของการเคลื่อนที่ของวัตถุ ครอบคลุมถึงการยืดเวลาการหดตัวของความยาวและการแปลงลอเรนซ์ [ 11 ] : 12.8 จลนพลศาสตร์ของสัมพัทธภาพทำงานในเรขาคณิตของปริภูมิเวลาโดยที่จุดในปริภูมิจะถูกเสริมด้วยพิกัดเวลาเพื่อสร้างเวกเตอร์ 4 มิติ [ 12 ] : 221
เวอร์เนอร์ ไฮเซนเบิร์กได้ตีความจลนศาสตร์แบบคลาสสิกใหม่สำหรับระบบควอนตัมในบทความปี 1925 ของเขาเรื่อง"เกี่ยวกับการตีความความสัมพันธ์ทางจลนศาสตร์และกลศาสตร์ใหม่ตามทฤษฎีควอนตัม" [ 13 ] ดิแรก สังเกตเห็นความคล้ายคลึงกันในโครงสร้างระหว่างสูตรของไฮเซนเบิร์กและวงเล็บปัวซง แบบคลาสสิ ก[ 14 ] : 143 ในบทความติดตามผลในปี 1927 ไฮเซนเบิร์กแสดงให้เห็นว่าแนวคิดทางจลนศาสตร์แบบคลาสสิก เช่น ความเร็วและพลังงาน ใช้ได้ในกลศาสตร์ควอนตัม แต่คู่ของปริมาณทางจลนศาสตร์และพลศาสตร์ที่สัมพันธ์กันไม่สามารถวัดได้พร้อมกัน ซึ่งเป็นผลลัพธ์ที่เขาเรียกว่าความไม่แน่นอน แต่ต่อมาเป็นที่รู้จักกันในชื่อหลักการความไม่แน่นอน [ 15 ]
นิรุกติศาสตร์
คำว่า kinematic เป็นคำภาษาอังกฤษที่มาจากคำว่า cinématique ของAM Ampère [ 16 ]ซึ่งเขาสร้างขึ้นจากคำภาษากรีกκίνημα kinema ("การเคลื่อนไหว, การเคลื่อนที่") ซึ่งมาจากκινεῖν kinein ("เคลื่อนที่") [ 17 ] [ 18 ]
Kinematic และ cinématique เกี่ยวข้องกับคำภาษาฝรั่งเศส cinéma แต่ทั้งสองคำไม่ได้มาจากคำนั้นโดยตรง อย่างไรก็ตาม ทั้งสองคำมีรากศัพท์ร่วมกัน เนื่องจาก cinéma มาจากรูปย่อของ cinématographe ซึ่งหมายถึง "เครื่องฉายภาพยนตร์และกล้อง" ซึ่งมาจากคำภาษากรีกที่หมายถึงการเคลื่อนไหว และมาจากคำภาษากรีกγρᾰ́φω grapho ("เขียน") [ 19 ]
จลนศาสตร์ของวิถีการเคลื่อนที่ของอนุภาคในกรอบอ้างอิงที่ไม่หมุน




จลนศาสตร์ของอนุภาคคือการศึกษาเกี่ยวกับวิถีการเคลื่อนที่ของอนุภาค ตำแหน่งของอนุภาคถูกกำหนดโดยเวกเตอร์พิกัดจากจุดกำเนิดของระบบพิกัดไปยังอนุภาค ตัวอย่างเช่น พิจารณาหอคอยที่อยู่ห่างจากบ้านของคุณไปทางทิศใต้ 50 เมตร โดยที่ระบบพิกัดมีจุดศูนย์กลางอยู่ที่บ้านของคุณ และทิศตะวันออกอยู่ในทิศทางของ แกน xและทิศเหนืออยู่ในทิศทางของ แกน yดังนั้นเวกเตอร์พิกัดไปยังฐานของหอคอยคือr = (0 ม., -50 ม., 0 ม.) ถ้าหอคอยสูง 50 เมตร และความสูงนี้วัดตาม แกน zดังนั้นเวกเตอร์พิกัดไปยังยอดหอคอยคือr = (0 ม., -50 ม., 50 ม.)
โดยทั่วไปแล้ว ระบบพิกัดสามมิติจะใช้ในการกำหนดตำแหน่งของอนุภาค อย่างไรก็ตาม หากอนุภาคถูกจำกัดให้เคลื่อนที่ภายในระนาบ ระบบพิกัดสองมิติก็เพียงพอแล้ว การสังเกตการณ์ทั้งหมดในวิชาฟิสิกส์จะไม่สมบูรณ์หากไม่ได้อธิบายโดยอ้างอิงจากกรอบอ้างอิง
เวกเตอร์ตำแหน่งของอนุภาคคือเวกเตอร์ที่ลากจากจุดกำเนิดของกรอบอ้างอิงไปยังอนุภาค มันแสดงทั้งระยะห่างของจุดจากจุดกำเนิดและทิศทางของจุดจากจุดกำเนิด ในสามมิติ เวกเตอร์ตำแหน่งสามารถแสดงได้ดังสมการ โดยที่, , และคือพิกัดคาร์ทีเซียนและ, และคือเวกเตอร์หน่วยตาม แกนพิกัด , , และตามลำดับ ขนาดของเวกเตอร์ตำแหน่งแสดงระยะห่างระหว่างจุดกับจุดกำเนิด โคไซน์ทิศทาง ของเวกเตอร์ตำแหน่งให้ค่าเชิงปริมาณของทิศทาง โดยทั่วไปแล้ว เวกเตอร์ตำแหน่งของวัตถุจะขึ้นอยู่กับกรอบอ้างอิง กรอบอ้างอิงที่แตกต่างกันจะให้ค่าเวกเตอร์ตำแหน่งที่แตกต่างกัน











วิถีการเคลื่อนที่ของอนุภาคเป็นฟังก์ชันเวกเตอร์ของเวลาซึ่งกำหนดเส้นโค้งที่อนุภาคเคลื่อนที่ไปตาม โดยกำหนดโดย ที่, , และอธิบายพิกัดแต่ละจุดของตำแหน่งอนุภาคเป็นฟังก์ชันของเวลา






ความเร็วและอัตราเร็ว
ความเร็วของอนุภาคเป็นปริมาณเวกเตอร์ที่อธิบายทั้งทิศทางและขนาดของการเคลื่อนที่ของอนุภาค ในทางคณิตศาสตร์ ความเร็วของจุดนั้นเกิดจากอัตราการเปลี่ยนแปลงของเวกเตอร์ตำแหน่งเทียบกับเวลา พิจารณาอัตราส่วนที่เกิดจากการหารผลต่างของตำแหน่งสองตำแหน่งของอนุภาค ( การกระจัด ) ด้วยช่วงเวลา อัตราส่วนนี้เรียกว่าความเร็วเฉลี่ยในช่วงเวลานั้น และกำหนดโดยสูตร โดยที่คือเวกเตอร์การกระจัดในช่วงเวลา เมื่อช่วงเวลา เข้าใกล้ ศูนย์ความเร็วเฉลี่ยจะเข้าใกล้ความเร็วขณะทันที ซึ่งกำหนดโดย อนุพันธ์ ของเวกเตอร์ตำแหน่ง เทียบกับ เวลา ดังนั้น ความเร็วของอนุภาคคืออัตราการเปลี่ยนแปลงของตำแหน่งเทียบกับเวลา ยิ่งไปกว่านั้น ความเร็วนี้สัมผัสกับวิถีการเคลื่อนที่ของอนุภาคในทุกตำแหน่งตามเส้นทาง ในกรอบอ้างอิงที่ไม่หมุน อนุพันธ์ของทิศทางพิกัดจะไม่ถูกพิจารณา เนื่องจากทิศทางและขนาดของมันเป็นค่าคงที่




ความเร็ว ของ วัตถุคือขนาดของเวโลซิตี้ของวัตถุนั้น มันเป็นปริมาณสเกลาร์ โดยที่คือความยาวส่วนโค้งที่วัดตามวิถีการเคลื่อนที่ของอนุภาค ความยาวส่วนโค้งนี้จะต้องเพิ่มขึ้นเสมอเมื่ออนุภาคเคลื่อนที่ ดังนั้น จึงมีค่าไม่เป็นลบ ซึ่งหมายความว่าความเร็วก็มีค่าไม่เป็นลบเช่นกัน



การเร่งความเร็ว
เวกเตอร์ความเร็วสามารถเปลี่ยนแปลงได้ทั้งขนาดและทิศทาง หรือทั้งสองอย่างพร้อมกัน ดังนั้น ความเร่งจึงพิจารณาทั้งอัตราการเปลี่ยนแปลงของขนาดของเวกเตอร์ความเร็วและอัตราการเปลี่ยนแปลงของทิศทางของเวกเตอร์นั้น เหตุผลเดียวกันที่ใช้ในการกำหนดความเร็วโดยพิจารณาจากตำแหน่งของอนุภาค สามารถนำมาใช้ในการกำหนดความเร่งโดยพิจารณาจากความเร็วได้เช่นกันความเร่งของอนุภาคคือเวกเตอร์ที่กำหนดโดยอัตราการเปลี่ยนแปลงของเวกเตอร์ความเร็วความเร่งเฉลี่ยของอนุภาคในช่วงเวลาหนึ่งถูกกำหนดโดยอัตราส่วน โดยที่ Δv คือความเร็วเฉลี่ย และ Δt คือช่วงเวลา

ความเร่งของอนุภาคคือค่าลิมิตของความเร่งเฉลี่ยเมื่อช่วงเวลาเข้าใกล้ศูนย์ ซึ่งก็คืออนุพันธ์เทียบกับเวลา

หรืออีกทางเลือกหนึ่ง

ดังนั้น ความเร่งจึงเป็นอนุพันธ์อันดับแรกของเวกเตอร์ความเร็วและอนุพันธ์อันดับสองของเวกเตอร์ตำแหน่งของอนุภาคนั้น ในกรอบอ้างอิงที่ไม่หมุน อนุพันธ์ของทิศทางพิกัดจะไม่ถูกพิจารณา เนื่องจากทิศทางและขนาดของมันเป็นค่าคงที่
ขนาดของความเร่งของวัตถุคือขนาด | a | ของเวกเตอร์ความเร่ง ซึ่งเป็นปริมาณสเกลาร์:

เวกเตอร์ตำแหน่งสัมพัทธ์
เวกเตอร์ตำแหน่งสัมพัทธ์คือ เวกเตอร์ที่กำหนดตำแหน่งของจุดหนึ่งเทียบกับอีกจุดหนึ่ง มันคือผลต่างของตำแหน่งของจุดทั้งสอง ตำแหน่งของจุดAเทียบกับจุดBก็คือผลต่างระหว่างตำแหน่งของจุดทั้งสองนั่นเอง

ซึ่งก็คือผลต่างระหว่างส่วนประกอบของเวกเตอร์ตำแหน่งของพวกมัน
ถ้าจุดAมีส่วนประกอบของตำแหน่ง

และจุดBมีส่วนประกอบของตำแหน่ง

ดังนั้น ตำแหน่งของจุดAเทียบกับจุดBคือผลต่างระหว่างส่วนประกอบของทั้งสองจุด:

ความเร็วสัมพัทธ์

ความเร็วของจุดหนึ่งเทียบกับอีกจุดหนึ่งนั้นก็คือผลต่างระหว่างความเร็วของทั้งสองจุด ซึ่งก็คือผลต่างระหว่างส่วนประกอบของความเร็วทั้งสองนั่นเอง

ถ้าจุดAมีส่วนประกอบของความเร็วและจุดBมีส่วนประกอบของความเร็วความเร็วของจุดAเทียบกับจุดBคือผลต่างระหว่างส่วนประกอบของความเร็วทั้งสอง:



อีกวิธีหนึ่ง ผลลัพธ์เดียวกันนี้สามารถได้มาจากการคำนวณอนุพันธ์เทียบกับเวลาของเวกเตอร์ตำแหน่งสัมพัทธ์r B/ A
ความเร่งสัมพัทธ์
ความเร่งของจุดCเทียบกับจุดBคือผลต่างระหว่างความเร่งของ ทั้งสองจุด ซึ่งก็คือผลต่างระหว่างส่วนประกอบของความเร่งของทั้งสองจุดนั่นเอง

ถ้าจุดCมีส่วนประกอบของความเร่ง และจุดBมีส่วนประกอบของความเร่ง ความเร่งของจุดCเทียบกับจุดBคือผลต่างระหว่างส่วนประกอบของความเร่งทั้งสอง:



โดยสมมติว่าทราบเงื่อนไขเริ่มต้นของตำแหน่งและความเร็วณ เวลาการอินทิเกรตครั้งแรกจะให้ความเร็วของอนุภาคเป็นฟังก์ชันของเวลา[ 20 ]




สามารถหาความสัมพันธ์เพิ่มเติมระหว่างการกระจัด ความเร็ว ความเร่ง และเวลาได้ หากความเร่งคงที่ สามารถแทนค่าลงในสมการข้างต้นได้ดังนี้:


ความสัมพันธ์ระหว่างความเร็ว ตำแหน่ง และความเร่ง โดยไม่ขึ้นอยู่กับเวลาโดยตรง สามารถหาได้โดยการแก้สมการหาค่าเฉลี่ยของความเร่งเทียบกับเวลา แล้วแทนค่าและทำให้ง่ายขึ้น

โดยที่หมายถึงผลคูณดอทซึ่งเหมาะสมเนื่องจากผลคูณเป็นค่าสเกลาร์ ไม่ใช่เวกเตอร์



ผลคูณดอทสามารถแทนที่ได้ด้วยค่าโคไซน์ของมุมαระหว่างเวกเตอร์ (ดู รายละเอียดเพิ่มเติมได้ที่ การตีความเชิงเรขาคณิตของผลคูณดอท ) และแทนที่เวกเตอร์ด้วยขนาดของเวกเตอร์ ในกรณีนี้:

ในกรณีที่ความเร่งมีทิศทางเดียวกับการเคลื่อนที่เสมอ และทิศทางการเคลื่อนที่ควรเป็นบวกหรือลบ มุมระหว่างเวกเตอร์ ( α ) จะเป็น 0 ดังนั้นและ สามารถทำให้ง่ายขึ้นได้โดยใช้สัญลักษณ์สำหรับขนาดของเวกเตอร์โดยที่สามารถเป็นเส้นทางโค้งใดๆ ก็ได้ เนื่องจากความเร่งสัมผัสคงที่ถูกใช้ไปตามเส้นทางนั้น ดังนั้น





สิ่งนี้จะลดสมการการเคลื่อนที่แบบพาราเมตริกของอนุภาคให้เหลือความสัมพันธ์แบบคาร์ทีเซียนของความเร็วเทียบกับตำแหน่ง ความสัมพันธ์นี้มีประโยชน์เมื่อไม่ทราบเวลา นอกจากนี้เรารู้ว่าหรือคือพื้นที่ใต้กราฟความเร็ว-เวลา[ 21 ]


เราสามารถหาพื้นที่ด้านบนและพื้นที่ด้านล่างได้โดยการบวกพื้นที่ด้านล่างเข้าด้วยกัน พื้นที่ด้านล่างเป็นรูปสี่เหลี่ยมผืนผ้า และพื้นที่ของรูปสี่เหลี่ยมผืนผ้าคือ โดยที่คือความกว้างและคือความสูง ในกรณีนี้และ(ในที่นี้แตกต่างจากความเร่ง) ซึ่งหมายความว่าพื้นที่ด้านล่างคือทีนี้มาหาพื้นที่ด้านบน (รูปสามเหลี่ยม) กัน พื้นที่ของรูปสามเหลี่ยมคือโดยที่คือฐานและคือความสูง[ 22 ]ในกรณีนี้และหรือการบวกและจะได้สมการ[ 23 ] สมการนี้ใช้ได้เมื่อความเร็วสุดท้ายvไม่ทราบค่า















วิถีการเคลื่อนที่ของอนุภาคในระบบพิกัดทรงกระบอก-เชิงขั้ว
โดยทั่วไปแล้ว การกำหนดวิถีการเคลื่อนที่ของอนุภาคr ( t ) = ( x ( t ), y ( t ), z ( t )) โดยใช้พิกัดเชิงขั้วใน ระนาบ X - Y นั้นสะดวกกว่า ในกรณีนี้ ความเร็วและความเร่งของอนุภาคจะมีรูปแบบที่สะดวก
โปรดจำไว้ว่าวิถีการเคลื่อนที่ของอนุภาคPถูกกำหนดโดยเวกเตอร์พิกัดr ของมัน ซึ่งวัดในกรอบอ้างอิงคงที่Fขณะที่อนุภาคเคลื่อนที่ เวกเตอร์พิกัดr ( t ) จะลากตามวิถีการเคลื่อนที่ของมัน ซึ่งเป็นเส้นโค้งในอวกาศ โดยกำหนดโดย: โดยที่x̂ , ŷและẑคือเวกเตอร์หน่วยตาม แกน x , yและzของกรอบอ้างอิงFตามลำดับ
พิจารณาอนุภาคPที่เคลื่อนที่เฉพาะบนพื้นผิวของทรงกระบอกวงกลมr ( t ) = ค่าคงที่ เราสามารถจัด แนวแกน zของกรอบอ้างอิงคงที่F ให้ ตรงกับแกนของทรงกระบอกได้ จากนั้นมุมθรอบแกนนี้ใน ระนาบ x - yสามารถใช้กำหนดวิถีการเคลื่อนที่ได้ โดย ที่ระยะห่างคงที่จากจุดศูนย์กลางแทนด้วยrและθ ( t ) เป็นฟังก์ชันของเวลา

พิกัดทรงกระบอกสำหรับr ( t ) สามารถทำให้ง่ายขึ้นได้โดยการนำเวกเตอร์หน่วยแนวรัศมีและแนวสัมผัส รวมถึงอนุพันธ์เทียบกับเวลาจากแคลคูลัสเบื้องต้นมาใช้:





เมื่อใช้สัญลักษณ์นี้r ( t ) จะอยู่ในรูปแบบ โดยทั่วไปแล้ว วิถีr ( t ) ไม่จำเป็นต้องอยู่บนทรงกระบอกวงกลม ดังนั้นรัศมีRจึงแปรผันตามเวลา และวิถีของอนุภาคในพิกัดทรงกระบอก-เชิงขั้วจะเป็นดังนี้: โดยที่r , θและzอาจเป็นฟังก์ชันที่หาอนุพันธ์ได้อย่างต่อเนื่องเมื่อเทียบกับเวลา และจะละเว้นสัญลักษณ์ฟังก์ชันเพื่อความง่าย เวกเตอร์ความเร็วvPคืออนุพันธ์ของวิถีr ( t ) เมื่อเทียบกับเวลา ซึ่งจะได้ผลลัพธ์ ดังนี้ :



ในทำนองเดียวกัน ความเร่งa Pซึ่งเป็นอนุพันธ์ของความเร็วv P เทียบกับเวลา จะกำหนดโดย:

แรงที่กระทำต่อจุดศูนย์กลางความโค้งของเส้นทาง ณ จุดนั้น มักเรียกว่าความเร่งสู่ศูนย์กลาง ส่วนแรงอีกแรงหนึ่งเรียกว่าความเร่งโคริโอลิส


รัศมีคงที่
ถ้าวิถีการเคลื่อนที่ของอนุภาคถูกจำกัดให้อยู่บนทรงกระบอก รัศมีrจะคงที่ และเวกเตอร์ความเร็วและความเร่งจะง่ายขึ้น ความเร็วv Pคืออนุพันธ์เทียบกับเวลาของวิถีการเคลื่อนที่r ( t )

วิถีโค้งวงกลมระนาบ

กรณีพิเศษของวิถีการเคลื่อนที่ของอนุภาคบนทรงกระบอกวงกลมเกิดขึ้นเมื่อไม่มีการเคลื่อนที่ตาม แกน z : โดยที่rและz 0เป็นค่าคงที่ ในกรณีนี้ ความเร็วv Pจะกำหนดโดย: โดยที่คือความเร็วเชิงมุมของเวกเตอร์หน่วยθ ^รอบ แกน zของทรงกระบอก



ความเร่งa PของอนุภาคPมีค่าดังนี้:

ส่วนประกอบ ทั้งสองเรียกว่าส่วนประกอบความเร่ง ในแนวรัศมีและ แนวสัมผัส ตามลำดับ

สัญลักษณ์สำหรับความเร็วเชิงมุมและความเร่งเชิงมุมมักถูกกำหนดไว้ดังนี้ ดังนั้นส่วนประกอบของความเร่งในแนวรัศมีและแนวสัมผัสสำหรับวิถีโค้งวงกลมจึงเขียนได้ดังนี้


วิถีการเคลื่อนที่ของจุดในวัตถุที่เคลื่อนที่ในระนาบ
การเคลื่อนที่ของส่วนประกอบในระบบกลไกจะถูกวิเคราะห์โดยการกำหนดกรอบอ้างอิงให้กับแต่ละส่วน และพิจารณาว่ากรอบอ้างอิงต่างๆ เคลื่อนที่สัมพันธ์กันอย่างไร หากความแข็งแกร่งเชิงโครงสร้างของชิ้นส่วนนั้นเพียงพอ การเสียรูปของชิ้นส่วนเหล่านั้นสามารถละเลยได้ และสามารถใช้การแปลงแบบแข็งเกร็งเพื่อกำหนดการเคลื่อนที่สัมพันธ์นี้ได้ ซึ่งจะลดคำอธิบายการเคลื่อนที่ของส่วนต่างๆ ในระบบกลไกที่ซับซ้อนให้เหลือเพียงปัญหาของการอธิบายรูปทรงเรขาคณิตของแต่ละส่วน และความสัมพันธ์ทางเรขาคณิตของแต่ละส่วนเทียบกับส่วนอื่นๆ
เรขาคณิตคือการศึกษาคุณสมบัติของรูปทรงที่ยังคงเหมือนเดิมในขณะที่พื้นที่ถูกแปลงในรูปแบบต่างๆ—ในเชิงเทคนิคแล้ว มันคือการศึกษาค่าคงที่ภายใต้ชุดของการแปลง[ 25 ]การแปลงเหล่านี้สามารถทำให้เกิดการเคลื่อนที่ของสามเหลี่ยมในระนาบ ในขณะที่มุมของจุดยอดและระยะห่างระหว่างจุดยอดไม่เปลี่ยนแปลง จลนศาสตร์มักถูกอธิบายว่าเป็นเรขาคณิตประยุกต์ ซึ่งการเคลื่อนที่ของระบบกลไกจะถูกอธิบายโดยใช้การแปลงแบบแข็งของเรขาคณิตแบบยุคลิด
พิกัดของจุดในระนาบคือเวกเตอร์สองมิติในR² (ปริภูมิสองมิติ) การแปลงแบบคงรูป (Rigid transformations) คือการแปลงที่รักษาระยะห่าง ระหว่างจุดสอง จุดใดๆ เซตของการแปลงแบบคงรูปในปริภูมิ nมิติ เรียกว่ากลุ่มยุคลิด พิเศษ บนRnและใช้สัญลักษณ์SE( n )
การกระจัดและการเคลื่อนที่

ตำแหน่งของส่วนประกอบหนึ่งในระบบกลไกเมื่อเทียบกับอีกส่วนประกอบหนึ่งนั้น กำหนดโดยการนำกรอบอ้างอิงมาใช้ เช่น กรอบอ้างอิงMบนส่วนประกอบหนึ่ง ซึ่งเคลื่อนที่สัมพันธ์กับกรอบอ้างอิงคงที่Fบนอีกส่วนประกอบหนึ่ง การแปลงแบบแข็งตัว หรือการกระจัดของMเทียบกับFจะกำหนดตำแหน่งสัมพัทธ์ของส่วนประกอบทั้งสอง การกระจัดประกอบด้วยการรวมกันของการหมุนและการ เลื่อน
เซตของการกระจัดทั้งหมดของMเทียบกับFเรียกว่าปริภูมิการกำหนดค่าของMเส้นโค้งเรียบจากตำแหน่งหนึ่งไปยังอีกตำแหน่งหนึ่งในปริภูมิการกำหนดค่านี้คือเซตของการกระจัดต่อเนื่อง เรียกว่าการเคลื่อนที่ของMเทียบกับFการเคลื่อนที่ของวัตถุประกอบด้วยเซตของการหมุนและการเลื่อนต่อเนื่อง
การแสดงผลแบบเมทริกซ์
การรวมกันของการหมุนและการเลื่อนในระนาบR 2สามารถแสดงได้ด้วยเมทริกซ์ 3×3 ประเภทหนึ่งที่เรียกว่าการแปลงแบบเอกพันธุ์ (homogeneous transform) การแปลงแบบเอกพันธุ์ 3×3 สร้างขึ้นจากเมทริกซ์การหมุน 2×2 A ( φ ) และเวกเตอร์การเลื่อน 2×1 d = ( d x , d y ) ดังนี้: การแปลงแบบเอกพันธุ์เหล่านี้ทำการแปลงแบบแข็งเกร็ง (rigid transformations) บนจุดในระนาบz = 1 นั่นคือ บนจุดที่มีพิกัดr = ( x , y , 1)
![{\displaystyle [T(\phi ,\mathbf {d} )]={\begin{bmatrix}A(\phi )&\mathbf {d} \\\mathbf {0} &1\end{bmatrix}}={\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bเมทริกซ์}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50078656eb1b2395a2ad84383cd16868c54649b1)
โดยเฉพาะอย่างยิ่ง ให้rกำหนดพิกัดของจุดในกรอบอ้างอิงMที่ตรงกับกรอบคงที่Fเมื่อจุดกำเนิดของMถูกเลื่อนด้วยเวกเตอร์การแปลdเทียบกับจุดกำเนิดของFและหมุนด้วยมุม φ เทียบกับแกน x ของFพิกัดใหม่ในFของจุดในMจะกำหนดโดย:
![{\displaystyle \mathbf {P} =[T(\phi ,\mathbf {d} )]\mathbf {r} ={\begin{bmatrix}\cos \phi &-\sin \phi &d_{x}\\\sin \phi &\cos \phi &d_{y}\\0&0&1\end{bmatrix}}{\begin{bmatrix}x\\y\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9654bfae7e5d0f825ec57848bd5ab493f408804f)
การแปลงแบบเอกพันธุ์แสดงถึงการแปลงเชิงเส้นตรงการกำหนดสูตรนี้จำเป็นเนื่องจากการเลื่อนไม่ใช่การแปลงเชิงเส้นตรงของR 2อย่างไรก็ตาม การใช้เรขาคณิตเชิงโปรเจกทีฟทำให้R 2ถือเป็นเซตย่อยของR 3การเลื่อนกลายเป็นการแปลงเชิงเส้นตรงเชิงเส้นตรง[ 26 ]
การแปลแบบบริสุทธิ์
ถ้าวัตถุแข็งเกร็งเคลื่อนที่โดยที่กรอบอ้างอิงM ของมัน ไม่หมุน ( θ = 0) เมื่อเทียบกับกรอบคงที่Fการเคลื่อนที่นั้นเรียกว่าการเลื่อนบริสุทธิ์ ในกรณีนี้ วิถีการเคลื่อนที่ของทุกจุดในวัตถุจะเป็นค่าชดเชยของวิถีการเคลื่อนที่d ( t ) ของจุดกำเนิดของMนั่นคือ:
![{\displaystyle \mathbf {r} (t)=[T(0,\mathbf {d} (t))]\mathbf {p} =\mathbf {d} (t)+\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/32f22d9b4fcc015f80b746db422f93b8d8d145dc)
ดังนั้น สำหรับวัตถุที่เคลื่อนที่แบบแปลอย่างเดียว ความเร็วและความเร่งของทุกจุดPในวัตถุจะกำหนดโดย: โดยที่จุดหมายถึงอนุพันธ์เทียบกับเวลา และv Oและa Oคือความเร็วและความเร่งของจุดกำเนิดของกรอบอ้างอิงM ตามลำดับ โปรดจำไว้ว่าเวกเตอร์พิกัดpในMมีค่าคงที่ ดังนั้นอนุพันธ์ของมันจึงเป็นศูนย์

การหมุนของวัตถุรอบแกนคงที่
วัตถุต่างๆ เช่นม้าหมุน ในสนามเด็ก เล่น พัดลมระบายอากาศ หรือประตูบานพับ สามารถจำลองเป็นวัตถุแข็งที่หมุนรอบแกนคงที่แกนเดียวได้[ 27 ] : 37 แกนzได้รับการเลือกตามธรรมเนียม
ตำแหน่ง
วิธีนี้ช่วยให้สามารถอธิบายการหมุนได้ว่าเป็นตำแหน่งเชิงมุมของกรอบอ้างอิงระนาบMเทียบกับกรอบอ้างอิงคงที่Fรอบแกนzร่วมกันนี้ พิกัด p = ( x , y ) ในMสัมพันธ์กับพิกัดP = (X, Y) ในFโดยสมการเมทริกซ์:
![{\displaystyle \mathbf {P} (t)=[A(t)]\mathbf {p} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a4e865fc0f6be2e59e479f4b0a03f8114971382)
โดยที่ คือเมทริกซ์การหมุนที่กำหนดตำแหน่งเชิงมุมของMเทียบกับFเป็นฟังก์ชันของเวลา
![{\displaystyle [A(t)]={\begin{bmatrix}\cos(\theta (t))&-\sin(\theta (t))\\\sin(\theta (t))&\cos(\theta (t))\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/53916525d50fa175a581d579e61b62d7d8a4610d)
ความเร็ว
ถ้าจุดpไม่เคลื่อนที่ในMความเร็วของจุดนั้นในFจะกำหนดโดย เป็นการสะดวกที่จะกำจัดพิกัดpและเขียนสิ่งนี้เป็นการดำเนินการบนวิถีP ( t ) โดยที่เมทริกซ์ เรียกว่าเมทริกซ์ความเร็วเชิงมุมของMเทียบกับFพารามิเตอร์ωคืออนุพันธ์ของมุมθ เทียบกับเวลา นั่นคือ:
![{\displaystyle \mathbf {v} _{P}={\dot {\mathbf {P} }}=[{\dot {A}}(t)]\mathbf {p} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/701dae17b9e581be69746145fd6133e7f07f2f16)
![{\displaystyle \mathbf {v} _{P}=[{\dot {A}}(t)][A(t)^{-1}]\mathbf {P} =[\Omega ]\mathbf {P} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8fac9117de99ee6837c171f5f46eede17890bcba)
![{\displaystyle [\Omega ]={\begin{bmatrix}0&-\omega \\\omega &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eed637d1916abe2a271e19c744c416d1cf20e4f0)

การเร่งความเร็ว
ความเร่งของP ( t ) ในFได้มาจากการหาอนุพันธ์เทียบกับเวลาของความเร็ว ซึ่งจะได้เป็น โดยที่ คือเมทริกซ์ความเร่งเชิงมุมของMบนFและ
![{\displaystyle \mathbf {A} _{P}={\ddot {P}}(t)=[{\dot {\Omega }}]\mathbf {P} +[\Omega ]{\dot {\mathbf {P} }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62a4ca56d89ccc6d2ec6d0daffd6907b9c47ccd5)
![{\displaystyle \mathbf {A} _{P}=[{\dot {\Omega }}]\mathbf {P} +[\Omega ][\Omega ]\mathbf {P} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/50d611f89cc9b7358cec772370a6ee8d79a792a9)
![{\displaystyle [{\dot {\Omega }}]={\begin{bmatrix}0&-\alpha \\\alpha &0\end{bmatrix}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d6ebb7e70e2d2370e781ee86ea55cd0fb7d469d7)

ดังนั้น คำอธิบายเกี่ยวกับการหมุนจึงเกี่ยวข้องกับปริมาณสามอย่างนี้:
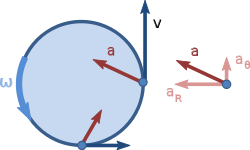
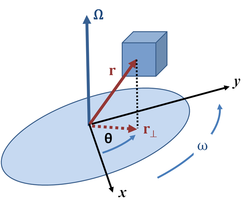
- ตำแหน่งเชิงมุม : ระยะทางที่กำหนดทิศทางจากจุดกำเนิดที่เลือกบนแกนหมุนไปยังจุดหนึ่งของวัตถุ คือ เวกเตอร์r ( t ) ที่ระบุตำแหน่งของจุดนั้น เวกเตอร์r ( t ) มีการฉายภาพ (หรือเทียบเท่ากับส่วนประกอบบางอย่าง) r⊥ ( t )บนระนาบที่ตั้งฉากกับแกนหมุน จากนั้น ตำแหน่งเชิงมุมของจุดนั้นคือมุมθจากแกนอ้างอิง (โดยทั่วไปคือแกนxบวก) ไปยังเวกเตอร์r⊥ ( t )ในทิศทางการหมุนที่ทราบ (โดยทั่วไปกำหนดโดยกฎมือขวา )
- ความเร็วเชิงมุม : ความเร็วเชิงมุมωคืออัตราการเปลี่ยนแปลงของตำแหน่งเชิงมุมθเทียบกับเวลาtโดยความเร็วเชิงมุมแสดงในรูปที่ 1 ด้วยเวกเตอร์Ωที่ชี้ไปตามแกนการหมุน โดยมีขนาดω และทิศทางกำหนดโดย ทิศทางการหมุนตามกฎมือขวา
- ความเร่งเชิงมุม : ขนาดของความเร่งเชิงมุมαคืออัตราการเปลี่ยนแปลงของความเร็วเชิงมุมωเทียบกับเวลาt :


สมการจลนศาสตร์การเคลื่อนที่เชิงเส้นสามารถขยายไปสู่จลนศาสตร์การหมุนในระนาบสำหรับความเร่งเชิงมุมคงที่ได้อย่างง่ายดายด้วยการแลกเปลี่ยนตัวแปรอย่างง่าย:




ในที่นี้θ iและθ fคือตำแหน่งเชิงมุมเริ่มต้นและตำแหน่งเชิงมุมสุดท้ายตามลำดับω iและω fคือความเร็วเชิงมุมเริ่มต้นและความเร็วเชิงมุมสุดท้ายตามลำดับ และαคือความเร่งเชิงมุมคงที่ แม้ว่าตำแหน่งในอวกาศและความเร็วในอวกาศจะเป็นเวกเตอร์ที่แท้จริง (ในแง่ของคุณสมบัติภายใต้การหมุน) แต่ความเร็วเชิงมุมนั้นไม่ใช่เวกเตอร์ที่แท้จริง เช่นเดียวกับมุมเอง
วิถีการเคลื่อนที่ของจุดในวัตถุที่เคลื่อนที่ในสามมิติ
สูตรสำคัญในจลศาสตร์กำหนดความเร็วและความเร่งของจุดต่างๆ ในวัตถุที่กำลังเคลื่อนที่ตามวิถีในพื้นที่สามมิติ สิ่งนี้มีความสำคัญอย่างยิ่งสำหรับจุดศูนย์กลางมวลของวัตถุ ซึ่งใช้ในการหาอนุพันธ์ของสมการการเคลื่อนที่โดยใช้กฎข้อที่สองของนิวตันหรือสมการของลากรางจ์
ตำแหน่ง
เพื่อกำหนดสูตรเหล่านี้ การเคลื่อนที่ของส่วนประกอบBของระบบกลไกจะถูกกำหนดโดยชุดของการหมุน [A( t )] และการเลื่อนd ( t ) ที่ประกอบกันเป็นการแปลงแบบเอกพันธุ์ [T( t )] = [A( t ), d ( t )] ถ้าpคือพิกัดของจุดPในBที่วัดในกรอบอ้างอิง เคลื่อนที่ Mแล้ววิถีการเคลื่อนที่ของจุดนี้ในFจะกำหนดโดย: สัญลักษณ์นี้ไม่ได้แยกความแตกต่างระหว่างP = (X, Y, Z, 1) และP = (X, Y, Z) ซึ่งน่าจะชัดเจนในบริบท
![{\displaystyle \mathbf {P} (t)=[T(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {P} \\1\end{bmatrix}}={\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6e928b50529956cc7ca762cee6969f7321c5cf9d)
สมการสำหรับวิถีการเคลื่อนที่ของP นี้ สามารถผกผันเพื่อคำนวณเวกเตอร์พิกัดpในMได้ดังนี้: นิพจน์นี้ใช้ข้อเท็จจริงที่ว่าเมทริกซ์การหมุนแบบทรานสโพสก็คือเมทริกซ์ผกผันของมันด้วย นั่นคือ:
![{\displaystyle \mathbf {p} =[T(t)]^{-1}\mathbf {P} (t)={\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}A(t)^{\text{T}}&-A(t)^{\text{T}}\mathbf {d} (t)\\0&1\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3e1aa622ad90b69b42880d95b90afb0b27407a60)
![{\displaystyle [A(t)]^{\text{T}}[A(t)]=I.\!}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e132dec7e35a3f7b5135d601bb20851ce2abe646)
ความเร็ว
ความเร็วของจุดPตามวิถีP ( t ) ได้มาจากการหาอนุพันธ์เทียบกับเวลาของเวกเตอร์ตำแหน่งนี้ จุดหมายถึงอนุพันธ์เทียบกับเวลา เนื่องจากpเป็นค่าคงที่ อนุพันธ์จึงเป็นศูนย์
![{\displaystyle \mathbf {v} _{P}=[{\dot {T}}(t)]\mathbf {p} ={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}=\left({\frac {d}{dt}}{\begin{bmatrix}A(t)&\mathbf {d} (t)\\0&1\end{bmatrix}}\right){\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}={\begin{bmatrix}{\dot {A}}(t)&{\dot {\mathbf {d} }}(t)\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {p} \\1\end{bmatrix}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d216e15ab36a895fa2fa109fbdf77b9590d5ccb)
สูตรนี้สามารถปรับเปลี่ยนเพื่อหาความเร็วของP ได้ โดยการดำเนินการกับวิถีการเคลื่อนที่P ( t ) ที่วัดในกรอบอ้างอิงคงที่Fการแทนที่การแปลงผกผันสำหรับpลงในสมการความเร็วจะได้: เมทริกซ์ [ S ] กำหนดโดย: โดยที่ คือเมทริกซ์ความเร็วเชิงมุม
![{\displaystyle {\begin{aligned}\mathbf {v} _{P}&=[{\dot {T}}(t)][T(t)]^{-1}\mathbf {P} (t)\\[4pt]&={\begin{bmatrix}\mathbf {v} _{P}\\0\end{bmatrix}}={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}A&\mathbf {d} \\0&1\end{bmatrix}}^{-1}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}&{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}A^{-1}{\begin{bmatrix}1&-\mathbf {d} \\0&A\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{-1}&-{\dot {A}}A^{-1}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[4pt]&={\begin{bmatrix}{\dot {A}}A^{\text{T}}&-{\dot {A}}A^{\text{T}}\mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}{\begin{bmatrix}\mathbf {P} (t)\\1\end{bmatrix}}\\[6pt]\mathbf {v} _{P}&=[S]\mathbf {P} .\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6aa70149e117b2b14b1f6d473dd453dc5530c7e6)
![{\displaystyle [S]={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +{\dot {\mathbf {d} }}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/90d988bfd6ff36b285d6294bf167b63d5f91bdef)
![{\displaystyle [\Omega ]={\dot {A}}A^{\text{T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/21d0117f60aeca689c59abbfe4b88b1a287a1b63)
เมื่อคูณด้วยตัวดำเนินการ [ S ] สูตรสำหรับความเร็วv Pจะมีรูปแบบดังนี้: โดยที่เวกเตอร์ω คือเวก เตอร์ ความเร็วเชิงมุมที่ได้จากส่วนประกอบของเมทริกซ์ [Ω]; เวกเตอร์ คือตำแหน่งของPเทียบกับจุดกำเนิดOของเฟรมเคลื่อนที่M ; และ คือความเร็วของจุดกำเนิดO
+{\dot {\mathbf {d} }}=\omega \times \mathbf {R} _{P/O}+\mathbf {v} _{O},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/127655f82eb90e56b116afbcf8aa567b908e516b)


การเร่งความเร็ว
ความเร่งของจุดPในวัตถุB ที่กำลังเคลื่อนที่ นั้นหาได้จากอนุพันธ์เทียบกับเวลาของเวกเตอร์ความเร็ว:
![{\displaystyle \mathbf {A} _{P}={\frac {d}{dt}}\mathbf {v} _{P}={\frac {d}{dt}}\left([S]\mathbf {P} \right)=[{\dot {S}}]\mathbf {P} +[S]{\dot {\mathbf {P} }}=[{\dot {S}}]\mathbf {P} +[S][S]\mathbf {P} .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/80998957f2829ada7a5e77e2fb68a31285e843cb)
สมการนี้สามารถขยายได้โดยการคำนวณ และ ก่อนอื่น
![{\displaystyle [{\dot {S}}]={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega {\dot {\mathbf {d} }}+{\ddot {\mathbf {d} }}\\0&0\end{bmatrix}}={\begin{bmatrix}{\dot {\Omega }}&-{\dot {\Omega }}\mathbf {d} -\Omega \mathbf {v} _{O}+\mathbf {A} _{O}\\0&0\end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4a39702184d0f72216205c32ebcfa8e0e9c3b478)
![{\displaystyle [S]^{2}={\begin{bmatrix}\Omega &-\Omega \mathbf {d} +\mathbf {v} _{O}\\0&0\end{bmatrix}}^{2}={\begin{bmatrix}\Omega ^{2}&-\Omega ^{2}\mathbf {d} +\Omega \mathbf {v} _{O}\\0&0\end{bเมทริกซ์}}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/557b35e24d57f15d0c9d2998053809be7105a2f9)
สูตรสำหรับความเร่งA Pสามารถหาได้ดังนี้: หรือ โดยที่αคือเวกเตอร์ความเร่งเชิงมุมที่ได้จากอนุพันธ์ของเวกเตอร์ความเร็วเชิงมุม; คือเวก เตอร์ ตำแหน่งสัมพัทธ์ (ตำแหน่งของPเทียบกับจุดกำเนิดOของกรอบอ้างอิงเคลื่อนที่M ); และ คือความเร่งของจุดกำเนิดของกรอบอ้างอิงเคลื่อนที่M



ข้อจำกัดทางจลศาสตร์
ข้อจำกัดทางจลศาสตร์ คือ ข้อจำกัดในการเคลื่อนที่ของส่วนประกอบต่างๆ ในระบบกลไก ข้อจำกัดทางจลศาสตร์สามารถแบ่งออกได้เป็นสองรูปแบบพื้นฐาน คือ (i) ข้อจำกัดที่เกิดจากบานพับ ตัวเลื่อน และข้อต่อลูกเบี้ยวที่กำหนดโครงสร้างของระบบ เรียกว่าข้อจำกัดแบบโฮโลโนมิกและ (ii) ข้อจำกัดที่กำหนดขึ้นกับความเร็วของระบบ เช่น ข้อจำกัดแบบคมมีดของรองเท้าสเก็ตน้ำแข็งบนระนาบ หรือการกลิ้งโดยไม่ลื่นไถลของแผ่นดิสก์หรือทรงกลมที่สัมผัสกับระนาบ ซึ่งเรียกว่าข้อจำกัดแบบนอนโฮโลโนมิกตัวอย่างทั่วไปบางส่วนมีดังต่อไปนี้
การเชื่อมโยงจลนศาสตร์
การเชื่อมต่อเชิงจลศาสตร์จะจำกัดองศาอิสระทั้ง 6 อย่างแม่นยำ
กลิ้งโดยไม่ลื่นไถล
วัตถุที่กลิ้งไปบนพื้นผิวโดยไม่ลื่นไถลนั้นเป็นไปตามเงื่อนไขที่ว่าความเร็วของจุดศูนย์กลางมวลของวัตถุ นั้น เท่ากับผลคูณเชิงเวกเตอร์ของความเร็วเชิงมุมของวัตถุกับเวกเตอร์ที่ลากจากจุดสัมผัสไปยังจุดศูนย์กลางมวล:

สำหรับกรณีของวัตถุที่ไม่เอียงหรือหมุน สมการนี้จะลดลงเหลือ.

สายไฟที่ไม่ยืดหยุ่น
นี่คือกรณีที่วัตถุเชื่อมต่อกันด้วยเชือกในอุดมคติที่ยังคงตึงและไม่สามารถเปลี่ยนแปลงความยาวได้ ข้อจำกัดคือผลรวมของความยาวของส่วนต่างๆ ของเชือกทั้งหมดคือความยาวทั้งหมด และด้วยเหตุนี้อนุพันธ์เทียบกับเวลาของผลรวมนี้จึงเป็นศูนย์[ 28 ] [ 29 ] [ 30 ]ปัญหาพลศาสตร์ประเภทนี้คือลูกตุ้มอีกตัวอย่างหนึ่งคือกลองที่หมุนด้วยแรงดึงดูดของแรงโน้มถ่วงบนน้ำหนักที่ตกลงมาซึ่งติดอยู่กับขอบด้วยเชือกที่ไม่ยืดหยุ่น[ 31 ] ปัญหา สมดุล(เช่น ไม่ใช่จลนศาสตร์) ประเภทนี้ก็คือเส้น โค้งแค ทเทนารี[ 32 ]
คู่จลนศาสตร์
Reuleauxเรียกการเชื่อมต่อที่เหมาะสมระหว่างส่วนประกอบที่ประกอบเป็นคู่จลนศาสตร์ ของเครื่องจักรว่าคู่จลนศาสตร์ เขาแยกแยะระหว่างคู่ระดับสูงซึ่งกล่าวกันว่ามีการสัมผัสแบบเส้นระหว่างลิงก์ทั้งสอง และคู่ระดับต่ำซึ่งมีการสัมผัสแบบพื้นที่ระหว่างลิงก์ J. Phillips แสดงให้เห็นว่ามีหลายวิธีในการสร้างคู่ที่ไม่ตรงกับการจำแนกประเภทง่ายๆ นี้[ 33 ]
คู่ล่าง
คู่ล่างคือข้อต่อในอุดมคติ หรือข้อจำกัดแบบโฮโลโนมิก ที่รักษาการสัมผัสระหว่างจุด เส้น หรือระนาบในวัตถุแข็ง (สามมิติ) ที่เคลื่อนที่ กับจุด เส้น หรือระนาบที่สอดคล้องกันในวัตถุแข็งที่อยู่กับที่ โดยมีกรณีดังต่อไปนี้:
- ข้อต่อแบบหมุนหรือข้อต่อบานพับนั้น ต้องการให้เส้นหรือแกนในตัวที่เคลื่อนที่อยู่ในแนวเดียวกันกับเส้นในตัวที่อยู่กับที่ และระนาบที่ตั้งฉากกับเส้นนี้ในตัวที่เคลื่อนที่ต้องสัมผัสกับระนาบที่ตั้งฉากกันในลักษณะเดียวกันในตัวที่อยู่กับที่ สิ่งนี้ทำให้เกิดข้อจำกัดห้าประการต่อการเคลื่อนที่สัมพัทธ์ของชิ้นส่วนต่างๆ ซึ่งจึงมีองศาอิสระหนึ่งองศา คือ การหมุนอย่างเดียวรอบแกนของบานพับ
- ข้อต่อแบบปริซึมหรือตัวเลื่อน ต้องการให้เส้นหรือแกนในตัวที่เคลื่อนที่อยู่แนวเดียวกับเส้นในตัวที่อยู่กับที่ และระนาบที่ขนานกับเส้นนี้ในตัวที่เคลื่อนที่ต้องสัมผัสกับระนาบขนานที่คล้ายกันในตัวที่อยู่กับที่ สิ่งนี้กำหนดข้อจำกัดห้าประการต่อการเคลื่อนที่สัมพัทธ์ของชิ้นส่วนต่างๆ ซึ่งจึงมีองศาอิสระหนึ่งองศา องศาอิสระนี้คือระยะทางของตัวเลื่อนตามแนวเส้น
- ข้อต่อทรงกระบอกต้องการให้เส้นหรือแกนในตัวที่เคลื่อนที่อยู่ต้องอยู่ในแนวเดียวกันกับเส้นในตัวที่อยู่กับที่ ข้อต่อชนิดนี้เป็นการผสมผสานระหว่างข้อต่อแบบหมุนและข้อต่อแบบเลื่อน ข้อต่อนี้มีองศาอิสระสององศา ตำแหน่งของตัวที่เคลื่อนที่ถูกกำหนดโดยทั้งการหมุนรอบแกนและการเลื่อนไปตามแกน
- ข้อต่อทรงกลม หรือข้อต่อลูกบอล คือข้อต่อที่กำหนดให้จุดหนึ่งบนตัววัตถุที่เคลื่อนที่ต้องสัมผัสกับจุดหนึ่งบนตัววัตถุที่อยู่กับที่ ข้อต่อชนิดนี้มีองศาอิสระสามองศา
- ข้อต่อแบบระนาบกำหนดให้ระนาบในตัววัตถุที่เคลื่อนที่ต้องสัมผัสกับระนาบในตัววัตถุที่อยู่กับที่ ข้อต่อชนิดนี้มีองศาอิสระสามองศา
คู่ที่สูงกว่า
โดยทั่วไปแล้ว คู่แรงระดับสูงคือข้อจำกัดที่กำหนดให้เส้นโค้งหรือพื้นผิวในตัวเคลื่อนที่ต้องรักษาการสัมผัสกับเส้นโค้งหรือพื้นผิวในตัวคงที่ ตัวอย่างเช่น การสัมผัสระหว่างลูกเบี้ยวและตัวตามลูกเบี้ยวเป็นคู่แรงระดับสูงที่เรียกว่าข้อต่อลูกเบี้ยวในทำนองเดียวกันการสัมผัสระหว่างเส้นโค้งอินโวลูตที่ประกอบเป็นฟันเฟืองของเกียร์สองตัวก็เป็นข้อต่อลูกเบี้ยวเช่นกัน
โซ่จลศาสตร์

วัตถุแข็งเกร็ง ("ข้อต่อ") ที่เชื่อมต่อกันด้วยคู่ข้อต่อ ("จุดต่อ") เรียกว่าโซ่จลศาสตร์กลไกและหุ่นยนต์เป็นตัวอย่างของโซ่จลศาสตร์ระดับความเป็นอิสระของโซ่จลศาสตร์คำนวณได้จากจำนวนข้อต่อและจำนวนและชนิดของข้อต่อโดยใช้สูตรการเคลื่อนที่สูตรนี้ยังสามารถใช้เพื่อแจกแจงโครงสร้างทางโทโพโลยีของโซ่จลศาสตร์ที่มีระดับความเป็นอิสระที่กำหนด ซึ่งเรียกว่าการสังเคราะห์ประเภทในการออกแบบเครื่องจักร
ตัวอย่าง
กลไกเชื่อมโยงระนาบที่มีองศาอิสระหนึ่งองศาซึ่งประกอบขึ้นจาก ชิ้นส่วนเชื่อมโยง Nชิ้นและบานพับหรือข้อต่อเลื่อน j ชิ้น มีดังนี้:
- N = 2, j = 1 : กลไกสองแท่งที่เป็นคาน;
- N = 4, j = 4 : กลไกสี่ข้อต่อ ;
- N = 6, j = 7 : กลไกหกข้อต่อ กลไกนี้ต้องมีข้อต่อสองข้อ (“ข้อต่อสามส่วน”) ที่รองรับข้อต่อสามข้อ มีโทโพโลยีที่แตกต่างกันสองแบบซึ่งขึ้นอยู่กับวิธีการเชื่อมต่อข้อต่อสามส่วนทั้งสอง ในโทโพโลยีของ Wattข้อต่อสามส่วนทั้งสองมีข้อต่อร่วมกัน ในโทโพโลยีของ Stephensonข้อต่อสามส่วนทั้งสองไม่มีข้อต่อร่วมกันและเชื่อมต่อกันด้วยข้อต่อสองส่วน[ 34 ]
- N = 8, j = 10 : กลไกแปดข้อต่อที่มีโครงสร้างแตกต่างกัน 16 แบบ;
- N = 10, j = 13 : กลไกข้อต่อสิบแท่งที่มีโครงสร้างแตกต่างกัน 230 แบบ;
- N = 12, j = 16 : กลไกข้อต่อสิบสองข้อที่มี 6,856 รูปแบบ
สำหรับโซ่ขนาดใหญ่และโครงสร้างการเชื่อมโยงของโซ่เหล่านั้น โปรดดู RP Sunkari และLC Schmidt , "การสังเคราะห์โครงสร้างของโซ่จลนศาสตร์ระนาบโดยการปรับใช้อัลกอริทึมแบบ McKay", Mechanism and Machine Theory #41, หน้า 1021–1030 (2006)
ดูเพิ่มเติม
- การขาดงาน
- การเร่งความเร็ว
- เรขาคณิตเชิงเส้นตรง § จลศาสตร์
- กลศาสตร์เชิงวิเคราะห์
- กลศาสตร์ประยุกต์
- กลศาสตร์ท้องฟ้า
- แรงสู่ศูนย์กลาง
- กลศาสตร์คลาสสิก
- ระยะทาง
- พลศาสตร์ (ฟิสิกส์)
- พลังสมมติ
- จลนศาสตร์ไปข้างหน้า
- กลไกสี่ข้อต่อ
- จลนศาสตร์ผกผัน
- กระตุก (ฟิสิกส์)
- กฎของเคปเลอร์
- การเชื่อมโยงจลนศาสตร์
- แผนภาพจลศาสตร์
- การสังเคราะห์จลนศาสตร์
- จลนศาสตร์ (ฟิสิกส์)
- การเคลื่อนที่ (ฟิสิกส์)
- กลศาสตร์วงโคจร
- สถิตศาสตร์
- ความเร็ว
- จลนศาสตร์เชิงอินทิกรัล
- เกณฑ์เชบีเชฟ-กรุบเลอร์-คุทซ์บัค
อ่านเพิ่มเติม
- Koetsier, Teun (1994), "§8.3 จลนศาสตร์", ในGrattan-Guinness, Ivor (บรรณาธิการ), สารานุกรมประกอบประวัติศาสตร์และปรัชญาของวิทยาศาสตร์คณิตศาสตร์เล่ม 2, Routledge , หน้า 994–1001 , ISBN 0-415-09239-6
- มูน, ฟรานซิส ซี. (2007). เครื่องจักรของเลโอนาร์โด ดา วินชี และฟรานซ์ รอยโลซ์ จลนศาสตร์ของเครื่องจักรตั้งแต่ยุคเรเนสซองส์จนถึงศตวรรษที่ 20สปริงเกอร์ISBN 978-1-4020-5598-0.
- Eduard Study (1913) แปลโดย DH Delphenich, "พื้นฐานและเป้าหมายของจลนศาสตร์เชิงวิเคราะห์ "
ลิงก์ภายนอก
- แอปเพล็ต Java สำหรับแสดงจลศาสตร์ 1 มิติ
- Physclips: กลศาสตร์พร้อมภาพเคลื่อนไหวและวิดีโอคลิปจากมหาวิทยาลัยนิวเซาท์เวลส์
- ห้องสมุดดิจิทัลแบบจำลองจลศาสตร์เพื่อการออกแบบ (KMODDL)นำเสนอภาพยนตร์และภาพถ่ายของแบบจำลองระบบกลไกที่ใช้งานได้จริงหลายร้อยแบบที่มหาวิทยาลัยคอร์เนลล์และห้องสมุดอีบุ๊กของตำราคลาสสิกเกี่ยวกับการออกแบบและวิศวกรรมเครื่องกล
- การกำหนดตำแหน่งระดับไมโครนิ้วด้วยส่วนประกอบจลศาสตร์
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ จลนศาสตร์
จลนศาสตร์ เป็นสาขาย่อยของ ฟิสิกส์ และเป็นสาขาหนึ่งของ เรขาคณิต ในฟิสิกส์ จลนศาสตร์ศึกษาลักษณะทางเรขาคณิตของการเคลื่อนที่ของวัตถุทางกายภาพโดยไม่ขึ้นอยู่กับแรงที่ทำให้เกิดการเคลื่อนท...
ภาพรวม
จลนศาสตร์ เป็นสาขาย่อยของ ฟิสิกส์ และ คณิตศาสตร์ ที่พัฒนาขึ้นใน กลศาสตร์คลาสสิก ซึ่งอธิบาย การเคลื่อนที่ ของจุด วัตถุ และระบบของวัตถุ (กลุ่มของวัตถุ) โดยไม่พิจารณา แรง ที่ทำให้วัตถุเคลื่อนที่ [ 1 ] [ 2 ] [ 3 ] จลนศาสตร์แตกต่างจาก พลศาสตร์ (หรือที่เรียกว่า...
นิรุกติศาสตร์
คำว่า kinematic เป็นคำภาษาอังกฤษที่มาจากคำว่า cinématique ของ AM Ampère [ 16 ] ซึ่ง เขา สร้าง ขึ้น จาก คำ ภาษากรีก κίνημα kinema ("การเคลื่อนไหว, การเคลื่อนที่") ซึ่งมาจาก κινεῖν kinein ("เคลื่อนที่") [ 17 ] [ 18 ]
จลนศาสตร์ของวิถีการเคลื่อนที่ของอนุภาคในกรอบอ้างอิงที่ไม่หมุน
จลนศาสตร์ของอนุภาคคือการศึกษาเกี่ยวกับวิถีการเคลื่อนที่ของอนุภาค ตำแหน่งของอนุภาคถูกกำหนดโดยเวกเตอร์พิกัดจากจุดกำเนิดของระบบพิกัดไปยังอนุภาค ตัวอย่างเช่น พิจารณาหอคอยที่อยู่ห่างจากบ้านของคุณไปทางทิศใต้ 50 เมตร โดยที่ระบบพิกัดมีจุดศูนย์กลางอยู่ที่บ้านของคุณ...