อ่าน 31 นาที
การรวมกลุ่มและการเล่นเป็นฝูง
ในทางชีววิทยา กลุ่ม ปลา ใดๆ ที่อยู่รวมกันด้วยเหตุผลทางสังคมเรียกว่า ฝูงปลา และหากกลุ่มนั้นว่ายน้ำไปในทิศทางเดียวกันอย่างเป็นระบบเรียกว่าการ รวม กลุ่มเป็นฝูง [ 1 ]...
การรวมกลุ่มและการเล่นเป็นฝูง


ในทางชีววิทยา กลุ่มปลา ใดๆ ที่อยู่รวมกันด้วยเหตุผลทางสังคมเรียกว่าฝูงปลาและหากกลุ่มนั้นว่ายน้ำไปในทิศทางเดียวกันอย่างเป็นระบบเรียกว่าการรวม กลุ่มเป็นฝูง [ 1 ]ในการใช้งานทั่วไป บางครั้งคำศัพท์เหล่านี้ถูกใช้ค่อนข้างไม่เคร่งครัด[ 1 ]ประมาณหนึ่งในสี่ของสายพันธุ์ปลาจะรวมกลุ่มเป็นฝูงตลอดชีวิต และประมาณครึ่งหนึ่งจะรวมกลุ่มเป็นฝูงเพียงบางส่วนของชีวิต[ 2 ]
ปลาได้รับประโยชน์หลายอย่างจากการรวมฝูง เช่น การป้องกันตัวจากผู้ล่า (โดยการตรวจจับผู้ล่าได้ดีขึ้นและลดโอกาสที่แต่ละตัวจะถูกจับ) การเพิ่ม ประสิทธิภาพ ในการหาอาหารและโอกาสในการหาคู่ที่สูงขึ้น
ปลาได้รับประโยชน์จากการรวมฝูงเนื่องจาก ประสิทธิภาพ ทางอุทกพลศาสตร์ ที่เพิ่มขึ้น ซึ่งหมายความว่าพวกมันเคลื่อนที่ได้เร็วขึ้นและใช้พลังงานน้อยลง[ 3 ]
ปลาใช้ลักษณะหลายอย่างในการเลือกเพื่อนร่วมฝูง โดยทั่วไปแล้วพวกมันจะชอบฝูงที่ใหญ่กว่า ฝูงที่มีสายพันธุ์เดียวกัน ฝูงที่มีขนาดและรูปร่างหน้าตาคล้ายคลึงกัน ปลาที่มีสุขภาพดี และญาติ (เมื่อจำได้) ทฤษฎีความแตกต่างกล่าวว่า สมาชิกในฝูงใดๆ ที่มีรูปร่างหน้าตาโดดเด่นจะตกเป็นเป้าหมายของสัตว์ผู้ล่ามากกว่า ทำให้ฝูงมีลักษณะที่คล้ายคลึงกันมากขึ้น
ภาพรวม
การรวมตัวของปลาเป็นคำทั่วไปที่ใช้เรียกกลุ่มปลาใดๆ ก็ตามที่รวมตัวกันอยู่ในบริเวณใดบริเวณหนึ่ง การรวมตัวของปลาอาจมีโครงสร้างหรือไม่ก็ได้ การรวมตัวที่ไม่มีโครงสร้างอาจเป็นกลุ่มปลาหลายชนิดและหลายขนาดที่รวมตัวกันแบบสุ่มใกล้กับแหล่งทรัพยากรในท้องถิ่น เช่น แหล่งอาหารหรือแหล่งวางไข่
นอกจากนี้ หากการรวมกลุ่มเกิดขึ้นในลักษณะปฏิสัมพันธ์ทางสังคม ก็อาจกล่าวได้ว่าพวกมันกำลังรวมกลุ่มกันเป็นฝูง[ 1 ] [ a ] แม้ว่าปลาที่รวมกลุ่มกันเป็นฝูงจะมีความสัมพันธ์กันอย่างหลวมๆ โดยที่ปลาแต่ละตัวว่ายน้ำและหาอาหารอย่างค่อนข้างอิสระ แต่พวกมันก็ยังรับรู้ถึงสมาชิกตัวอื่นๆ ในกลุ่ม ดังที่แสดงให้เห็นโดยวิธีที่พวกมันปรับพฤติกรรม เช่น การว่ายน้ำ เพื่อให้อยู่ใกล้กับปลาตัวอื่นๆ ในกลุ่ม กลุ่มปลาที่รวมกลุ่มกันเป็นฝูงอาจประกอบด้วยปลาที่มีขนาดแตกต่างกัน และอาจรวมถึงกลุ่มย่อยที่มีหลายชนิดพันธุ์
หากฝูงปลาจัดระเบียบกันอย่างแน่นหนามากขึ้น โดยปลาจะว่ายน้ำประสานกันเพื่อให้เคลื่อนที่ด้วยความเร็วและทิศทางเดียวกัน ก็อาจกล่าวได้ว่าปลาเหล่านั้นกำลังรวมฝูง[ 1 ] [ 4 ] [ b ]ปลาที่รวมฝูงมักจะเป็นปลาชนิดเดียวกันและมีอายุ/ขนาดเดียวกัน ฝูงปลาจะเคลื่อนที่โดยเว้นระยะห่างระหว่างสมาชิกแต่ละตัวอย่างแม่นยำ ฝูงปลาจะทำการเคลื่อนไหวที่ซับซ้อนราวกับว่าฝูงปลามีความคิดเป็นของตัวเอง[ 5 ]
ความซับซ้อนของการรวมกลุ่มกันยังไม่เป็นที่เข้าใจอย่างถ่องแท้ โดยเฉพาะอย่างยิ่งพลังงานในการว่ายน้ำและการหาอาหาร มีการเสนอสมมติฐานมากมายเพื่ออธิบายหน้าที่ของการรวมกลุ่มกัน เช่น การวางแนวที่ดีขึ้น การล่า ที่ ประสานกัน การทำให้ผู้ล่าสับสน และลดความเสี่ยงที่จะถูกพบ การรวมกลุ่มกันยังมีข้อเสีย เช่น การสะสมของของเสียในสื่อการหายใจ และการขาดแคลนออกซิเจนและอาหาร วิธีการจัดเรียงตัวของปลาในฝูงอาจให้ประโยชน์ในการประหยัดพลังงาน แม้ว่าเรื่องนี้จะเป็นที่ถกเถียงกันอยู่ก็ตาม[ 6 ]

ปลาสามารถอยู่ รวมกันเป็นฝูง ได้แบบบังคับหรือแบบไม่บังคับ (เลือกได้) [ 7 ]ปลาที่อยู่รวมกันเป็นฝูงแบบบังคับ เช่นปลาทูน่าปลาเฮริงและปลาแอนโชวี่จะใช้เวลาทั้งหมดอยู่รวมกันเป็นฝูง และจะกระสับกระส่ายหากถูกแยกออกจากกลุ่ม ปลาที่อยู่รวมกันเป็นฝูงแบบไม่บังคับ เช่นปลาค็อดแอตแลนติกปลาไซธ์และปลาคารังกิด บางชนิด จะอยู่รวมกันเป็นฝูงเพียงบางครั้งเท่านั้น อาจเพื่อการสืบพันธุ์[ 8 ]
ปลาที่อยู่รวมกันเป็นฝูงสามารถเปลี่ยนเป็นฝูงที่มีระเบียบวินัยและประสานงานกัน จากนั้นเปลี่ยนกลับไปเป็นฝูงที่ไม่มีรูปแบบที่แน่นอนได้ภายในไม่กี่วินาที การเปลี่ยนแปลงดังกล่าวเกิดขึ้นจากการเปลี่ยนแปลงกิจกรรม เช่น การหาอาหาร การพักผ่อน การเดินทาง หรือการหลีกเลี่ยงผู้ล่า[ 5 ]
เมื่อฝูงปลาหยุดเพื่อหาอาหาร พวกมันจะแยกแถวและรวมตัวกันเป็นฝูง ฝูงปลามีความเสี่ยงต่อการถูกล่าจากผู้ล่ามากกว่า รูปร่างของฝูงปลาขึ้นอยู่กับชนิดของปลาและสิ่งที่ปลากำลังทำ ฝูงปลาที่กำลังเดินทางอาจก่อตัวเป็นเส้นยาวบางๆ หรือเป็นรูปสี่เหลี่ยมจัตุรัส รูปไข่ หรือ รูปทรง คล้ายอะมีบา ฝูงปลา ที่เคลื่อนที่เร็วโดยทั่วไปจะก่อตัวเป็นรูปทรงลิ่ม ในขณะที่ฝูงปลาที่กำลังหาอาหารมักจะกลายเป็นรูปวงกลม[ 5 ]
ปลาเหยื่อคือปลาขนาดเล็กที่เป็นเหยื่อของสัตว์นักล่าขนาดใหญ่เพื่อเป็นอาหาร สัตว์นักล่าได้แก่ปลาขนาดใหญ่อื่นๆนกทะเลและสัตว์เลี้ยงลูกด้วยนมในทะเลปลาเหยื่อในมหาสมุทรทั่วไปเป็นปลาขนาดเล็กที่กินอาหารแบบกรองเช่นปลาเฮริ่งปลาแอนโชวี่และ ปลา เมนเฮเดนปลาเหยื่อชดเชยขนาดที่เล็กของพวกมันด้วยการรวมฝูง บางชนิดว่ายน้ำเป็นตารางที่ประสานกันโดยอ้าปากเพื่อให้สามารถกรองแพลงก์ตอนได้ อย่างมีประสิทธิภาพ [ 9 ]ฝูงเหล่านี้สามารถมีขนาดใหญ่มาก (หลายสิบล้านตัว) [ 10 ]เคลื่อนที่ไปตามแนวชายฝั่งและอพยพข้ามมหาสมุทรเปิด ฝูงปลาเหล่านี้เป็นแหล่งอาหารที่เข้มข้นสำหรับสัตว์นักล่าในทะเลขนาดใหญ่

การรวมตัวกันอย่างมหาศาลเหล่านี้บางครั้งเป็นเชื้อเพลิงให้กับห่วงโซ่อาหารในมหาสมุทรปลาเหยื่อส่วนใหญ่เป็นปลาที่อาศัยอยู่ในน้ำเปิด ซึ่งหมายความว่าพวกมันจะรวมตัวกันเป็นฝูงในน้ำเปิด ไม่ใช่บนหรือใกล้พื้นทะเล ( ปลาหน้าดิน ) ปลาเหยื่อมีอายุสั้น และมนุษย์มักไม่ทันสังเกตเห็น ผู้ล่าจะจับตามองฝูงปลาเหล่านี้อย่างใกล้ชิด ตระหนักถึงจำนวนและตำแหน่งของพวกมัน และอพยพย้ายถิ่นฐานด้วยตนเอง บ่อยครั้งเป็นฝูง ซึ่งอาจครอบคลุมระยะทางหลายพันไมล์เพื่อมาเชื่อมต่อหรือคงการเชื่อมต่อกับพวกมัน[ 11 ]
ปลาเฮอริ่งเป็นปลาที่อยู่รวมกันเป็นฝูงอย่างน่าทึ่ง พวกมันรวมตัวกันเป็นฝูงขนาดใหญ่ ฝูงที่ใหญ่ที่สุดมักจะเกิดขึ้นระหว่างการอพยพโดยการรวมตัวกับฝูงที่เล็กกว่า มีการสังเกตเห็นฝูงปลา มูลเล็ต ที่อพยพในทะเลแคสเปียน เป็น "โซ่" ยาว 100 กิโลเมตร (62 ไมล์) ราดาคอฟประมาณการว่าฝูงปลาเฮอริ่งในมหาสมุทรแอตแลนติกเหนือสามารถครอบครองพื้นที่ได้มากถึง 4.8 ลูกบาศก์กิโลเมตร (1.2 ลูกบาศก์ไมล์) โดยมีความหนาแน่นของปลาอยู่ระหว่าง 0.5 ถึง 1.0 ตัวต่อลูกบาศก์เมตร ( 3/8 ถึง3/4ตัวต่อลูกบาศก์หลา) รวมแล้วประมาณสามพันล้านตัวในฝูงเดียว[ 12 ] ฝูงเหล่านี้เคลื่อนที่ไปตามแนวชายฝั่งและ ข้ามมหาสมุทรเปิด ฝูงปลาเฮอริ่งโดยทั่วไปมีการจัดเรียงที่แม่นยำมาก ซึ่งช่วยให้ฝูงสามารถรักษาระดับความเร็วในการว่ายน้ำที่ค่อนข้างคงที่ ปลาเฮอริ่งมีประสาทการได้ยินที่ดีเยี่ยม และฝูงของพวกมันจะตอบสนองต่อผู้ล่าอย่างรวดเร็วมาก ปลาเฮริงจะรักษาระยะห่างจากนักดำน้ำที่กำลังเคลื่อนที่หรือผู้ล่าที่กำลังว่ายน้ำ เช่น วาฬเพชฌฆาต โดยสร้างช่องว่างที่มีลักษณะคล้ายโดนัทเมื่อมองจากเครื่องบินสอดแนม[ 13 ]
ปลาล่าเหยื่อขนาดใหญ่หลายชนิดก็รวมฝูงกัน รวมถึงปลาอพยพขนาดใหญ่หลายชนิด เช่น ปลาทูน่า และฉลามบางชนิดที่อาศัยอยู่ในมหาสมุทรส่วนวาฬโลมา และปลาวาฬ ก็รวมกลุ่มกันเป็นฝูงอย่างเป็น ระเบียบ
“โดยทั่วไปแล้ว พฤติกรรมการรวมฝูงจะถูกอธิบายว่าเป็นข้อแลกเปลี่ยนระหว่างประโยชน์ในการป้องกันผู้ล่าจากการอาศัยอยู่เป็นกลุ่มและต้นทุนของการแข่งขันในการหาอาหารที่เพิ่มขึ้น” [ 14 ]แลนดา (1998) โต้แย้งว่าข้อได้เปรียบสะสมของการรวมฝูง ดังที่ได้อธิบายไว้ด้านล่าง เป็นแรงจูงใจในการคัดเลือกที่แข็งแกร่งสำหรับปลาที่จะเข้าร่วมฝูง[ 15 ]แพริชและคณะ (2002) โต้แย้งในทำนองเดียวกันว่าการรวมฝูงเป็นตัวอย่างคลาสสิกของการเกิดขึ้นใหม่ซึ่งมีคุณสมบัติที่ฝูงครอบครองแต่ปลาแต่ละตัวไม่มี คุณสมบัติที่เกิดขึ้นใหม่นี้ให้ข้อได้เปรียบเชิงวิวัฒนาการแก่สมาชิกของฝูงซึ่งสมาชิกที่ไม่ใช่สมาชิกไม่ได้รับ[ 16 ]
ปฏิสัมพันธ์ทางสังคม
การสนับสนุนหน้าที่ทางสังคมและพันธุกรรมของการรวมกลุ่ม โดยเฉพาะอย่างยิ่งการรวมกลุ่มของปลา สามารถมองเห็นได้จากพฤติกรรมหลายด้าน ตัวอย่างเช่น การทดลองแสดงให้เห็นว่าปลาแต่ละตัวที่ถูกแยกออกจากฝูงจะมีอัตราการหายใจสูงกว่าปลาที่อยู่ในฝูง[ 17 ]ผลกระทบนี้เกิดจากความเครียด และผลของการอยู่ร่วมกับปลาชนิดเดียวกันจึงดูเหมือนจะเป็นผลที่ทำให้สงบลงและเป็นแรงจูงใจทางสังคมที่ทรงพลังสำหรับการคงอยู่ในการรวมกลุ่ม[ 18 ]ตัวอย่างเช่น ปลาเฮอริ่งจะกระสับกระส่ายมากหากถูกแยกออกจากปลาชนิดเดียวกัน[ 8 ]เนื่องจากการปรับตัวให้เข้ากับพฤติกรรมการรวมกลุ่ม พวกมันจึงไม่ค่อยถูกนำมาแสดงในตู้ปลาแม้จะมีสิ่งอำนวยความสะดวกที่ดีที่สุดที่ตู้ปลาสามารถมอบให้ได้ พวกมันก็ยังเปราะบางและเชื่องช้าเมื่อเทียบกับพลังงานที่กระฉับกระเฉงของพวกมันในฝูงตามธรรมชาติ
ข้อได้เปรียบในการหาอาหาร

นอกจากนี้ ยังมีการเสนอว่าการว่ายน้ำเป็นกลุ่มช่วยเพิ่มความสำเร็จในการหาอาหาร ความสามารถนี้ได้รับการพิสูจน์โดย Pitcher และคณะในการศึกษาพฤติกรรมการหาอาหารของปลาคาร์พ ที่อยู่รวมกัน เป็น ฝูง [ 19 ]ในการศึกษานี้ ได้มีการวัดเวลาที่กลุ่มปลาเล็กและปลาทองใช้ในการหาแหล่งอาหาร จำนวนปลาในกลุ่มมีความแตกต่างกัน และพบว่าเวลาที่จำเป็นสำหรับกลุ่มที่ใหญ่กว่าในการหาอาหารลดลงอย่างมีนัยสำคัญทางสถิติ หลักฐานเพิ่มเติมที่สนับสนุนความสามารถในการหาอาหารที่เพิ่มขึ้นของฝูงปลาพบได้ในโครงสร้างของฝูงปลาล่าเหยื่อ Partridge และคณะได้วิเคราะห์โครงสร้างฝูงปลาทูน่าครีบน้ำเงินแอตแลนติกจากภาพถ่ายทางอากาศและพบว่าฝูงปลามีรูปร่างเป็นพาราโบลา ซึ่งเป็นข้อเท็จจริงที่บ่งชี้ถึงการล่าแบบร่วมมือกันในสายพันธุ์นี้[ 20 ]
"เหตุผลก็คือมีดวงตาจำนวนมากที่คอยมองหาอาหาร ปลาในฝูงจะ "แบ่งปัน" ข้อมูลโดยการเฝ้าสังเกตพฤติกรรมของกันและกันอย่างใกล้ชิด พฤติกรรมการกินอาหารของปลาตัวหนึ่งจะกระตุ้นพฤติกรรมการค้นหาอาหารของปลาตัวอื่นอย่างรวดเร็ว[ 21 ]
แหล่งอาหารที่อุดมสมบูรณ์สำหรับปลาเหยื่อได้รับการจัดหาโดยกระแสน้ำขึ้นในมหาสมุทรกระแสน้ำวนในมหาสมุทรเป็นกระแสน้ำในมหาสมุทร ขนาดใหญ่ ที่เกิดจากผลของโคริโอลิสกระแสน้ำผิวน้ำที่ขับเคลื่อนด้วยลมมีปฏิสัมพันธ์กับกระแสน้ำวนเหล่านี้และภูมิประเทศใต้น้ำ เช่นภูเขาใต้ทะเลแหล่งประมงและขอบของไหล่ทวีปทำให้เกิดกระแสน้ำลงและกระแสน้ำขึ้น [ 22 ] สิ่งเหล่านี้สามารถขนส่งสารอาหารที่แพลงก์ตอนเจริญเติบโตได้ ผลที่ได้คือแหล่งอาหารที่อุดมสมบูรณ์ซึ่งดึงดูดปลาเหยื่อที่กินแพลงก์ตอน ในทางกลับกัน ปลาเหยื่อเหล่านั้นก็กลายเป็นแหล่งอาหารสำหรับปลาล่าเหยื่อขนาดใหญ่ กระแสน้ำขึ้นส่วนใหญ่เกิดขึ้นตามชายฝั่ง และหลายแห่งสนับสนุนการประมงที่อุดมสมบูรณ์ที่สุดในโลก ภูมิภาคที่มีกระแสน้ำขึ้นที่โดดเด่น ได้แก่ ชายฝั่งเปรูชิลีทะเลอาหรับทางตะวันตกของแอฟริกาใต้ทางตะวันออกของนิวซีแลนด์และชายฝั่ง แคลิฟอร์เนีย
โคพีพอด ซึ่งเป็น แพลงก์ตอนสัตว์หลักเป็นอาหารหลักของปลาเหยื่อ พวกมันเป็นกลุ่มของสัตว์จำพวกครัสเตเชียน ขนาดเล็ก ที่พบในแหล่งน้ำ ในมหาสมุทรและ น้ำจืด โคพีพอดมักมีความยาว 1 ถึง 2 มิลลิเมตร (0.039 ถึง 0.079 นิ้ว) มีรูปร่างคล้ายหยดน้ำตา นักวิทยาศาสตร์บางคนกล่าวว่าพวกมันมีมวลชีวภาพ ของสัตว์มากที่สุด ในโลก[ 23 ]โคพีพอดมีความว่องไวและหลบหลีกเก่ง พวกมันมีหนวด ขนาดใหญ่ (ดูภาพด้านล่างซ้าย) เมื่อพวกมันกางหนวดออก พวกมันสามารถรับรู้ถึงคลื่นความดันจากปลาที่กำลังเข้ามาใกล้และกระโดดด้วยความเร็วสูงในระยะไม่กี่เซนติเมตร หากความเข้มข้นของโคพีพอดสูงขึ้น ฝูงปลาเฮริงจะใช้กลยุทธ์ที่เรียกว่าการล่าแบบพุ่งชนในภาพด้านล่าง ปลาเฮริงกำลังล่าโคพี พอดเป็นอาหาร พวกมันว่ายน้ำโดยอ้าปากกว้างและกางฝา ปิดเหงือก ออกจนสุด
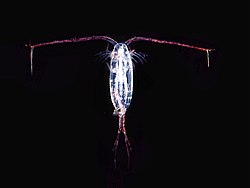 โคพีพอดตัวนี้กางหนวดออก (คลิกเพื่อขยาย) หนวดของมันใช้ตรวจจับคลื่นความดันของปลาที่กำลังเข้ามาใกล้
โคพีพอดตัวนี้กางหนวดออก (คลิกเพื่อขยาย) หนวดของมันใช้ตรวจจับคลื่นความดันของปลาที่กำลังเข้ามาใกล้ โคพีพอดเป็นแหล่งอาหารหลักของปลาเหยื่อ เช่นปลาเฮริงแอตแลนติก ชนิด นี้
โคพีพอดเป็นแหล่งอาหารหลักของปลาเหยื่อ เช่นปลาเฮริงแอตแลนติก ชนิด นี้ ฝูงปลาเฮริงกำลังตะครุบฝูงโคพีพอด โดยที่ฝาปิดเหงือกของโคพีพอดเปิดออก ทำให้เห็นเหงือกสีแดงของพวกมัน
ฝูงปลาเฮริงกำลังตะครุบฝูงโคพีพอด โดยที่ฝาปิดเหงือกของโคพีพอดเปิดออก ทำให้เห็นเหงือกสีแดงของพวกมัน ภาพเคลื่อนไหวแสดงให้เห็นว่าฝูงปลาเฮริงล่าเหยื่ออย่างพร้อมเพรียงกันเพื่อจับโคพีพอดที่ว่องไวและหลบหลีกเก่งได้อย่างไร
ภาพเคลื่อนไหวแสดงให้เห็นว่าฝูงปลาเฮริงล่าเหยื่ออย่างพร้อมเพรียงกันเพื่อจับโคพีพอดที่ว่องไวและหลบหลีกเก่งได้อย่างไร




ปลาว่ายน้ำเป็นตารางโดยมีระยะห่างระหว่างกันเท่ากับระยะการกระโดดของเหยื่อ ดังที่แสดงในภาพเคลื่อนไหวด้านบนขวา ในภาพเคลื่อนไหว ปลาเฮริงวัยอ่อนล่าโคพีพอดในลักษณะที่ประสานกัน โคพีพอดรับรู้คลื่นความดันของปลาเฮริงที่กำลังเข้ามาด้วยหนวดและตอบสนองด้วยการกระโดดหนีอย่างรวดเร็ว ความยาวของการกระโดดค่อนข้างคงที่ ปลาจะจัดเรียงตัวเองเป็นตารางด้วยระยะการกระโดดที่เป็นลักษณะเฉพาะนี้ โคพีพอดสามารถพุ่งตัวได้ประมาณ 80 ครั้งก่อนที่จะเหนื่อย หลังจากกระโดดแล้ว มันจะใช้เวลา 60 มิลลิวินาทีในการกางหนวดอีกครั้ง และความล่าช้าของเวลานี้กลายเป็นจุดจบของมัน เนื่องจากกระแสปลาเฮริงที่แทบไม่มีที่สิ้นสุดทำให้ปลาเฮริงสามารถงับโคพีพอดได้ในที่สุด ปลาเฮริงวัยอ่อนตัวเดียวไม่สามารถจับโคพีพอดขนาดใหญ่ได้[ 9 ]
ข้อได้เปรียบในการสืบพันธุ์
ประโยชน์ประการที่สามที่เสนอเกี่ยวกับกลุ่มปลาคือ พวกมันทำหน้าที่ในการสืบพันธุ์ พวกมันช่วยเพิ่มการเข้าถึงคู่ผสมพันธุ์ เนื่องจากการหาคู่ผสมพันธุ์ในฝูงไม่จำเป็นต้องใช้พลังงานมาก และสำหรับปลาอพยพที่เดินทางเป็นระยะทางไกลเพื่อวางไข่ การนำทางของฝูงปลาโดยอาศัยข้อมูลจากสมาชิกในฝูงทั้งหมด น่าจะดีกว่าการนำทางของปลาแต่ละตัว[ 5 ]

ปลาเหยื่อมักอพยพย้ายถิ่นฐานเป็นระยะทาง ไกล ระหว่างแหล่งวางไข่ แหล่งหากิน และแหล่งอนุบาลลูกปลา ฝูงปลาในสายพันธุ์ใดสายพันธุ์หนึ่งมักเดินทางเป็นรูปสามเหลี่ยมระหว่างแหล่งเหล่านี้ ตัวอย่างเช่น ปลาเฮริงสายพันธุ์หนึ่งมีแหล่งวางไข่ในนอร์เวย์ ตอนใต้ แหล่งหากินในไอซ์แลนด์และแหล่งอนุบาลลูกปลาในนอร์เวย์ตอนเหนือ การเดินทางเป็นรูปสามเหลี่ยมกว้างๆ เช่นนี้มีความสำคัญเพราะปลาเหยื่อไม่สามารถแยกแยะลูกปลาของตัวเองได้เมื่อกำลังกินอาหาร
ปลา แคปลินเป็นปลาเหยื่อใน วงศ์ ปลาสมอลต์พบในมหาสมุทรแอตแลนติกและอาร์กติกในฤดูร้อน พวกมันจะกินแพลงก์ตอน จำนวนมาก ที่ขอบชั้นน้ำแข็ง ปลาแคปลินขนาดใหญ่ยังกินเคยและสัตว์จำพวกกุ้ง อื่นๆ ด้วย ปลาแคปลินจะเคลื่อนตัวเข้าฝั่งเป็นฝูงใหญ่เพื่อวางไข่และอพยพในฤดูใบไม้ผลิและฤดูร้อนเพื่อหาอาหารในพื้นที่ที่มีแพลงก์ตอนอุดมสมบูรณ์ระหว่างไอซ์แลนด์กรีนแลนด์และแจนมาเยนการอพยพได้รับผลกระทบจากกระแสน้ำในมหาสมุทรรอบๆ ไอซ์แลนด์ ปลาแคปลินที่โตเต็มวัยจะอพยพไปทางเหนือเพื่อหาอาหารเป็นจำนวนมากในฤดูใบไม้ผลิและฤดูร้อน การอพยพกลับเกิดขึ้นในเดือนกันยายนถึงพฤศจิกายน การอพยพเพื่อวางไข่เริ่มต้นทางเหนือของไอซ์แลนด์ในเดือนธันวาคมหรือมกราคม[ 24 ]
ประสิทธิภาพทางอุทกพลศาสตร์
ทฤษฎีนี้กล่าวว่าฝูงปลาอาจประหยัดพลังงานได้เมื่อว่ายน้ำไปด้วยกัน คล้ายกับที่นักปั่นจักรยานอาจปั่นตามกันเป็นกลุ่มนอกจากนี้ยังเชื่อกันว่าห่านที่บินเป็นรูปตัววีจะประหยัดพลังงานได้โดยการบินตามกระแสลมขึ้นของปลายปีกที่เกิดจากห่านตัวก่อนหน้าในกลุ่ม[ 25 ] [ 26 ]มีการเสนอว่าการว่ายน้ำเป็นกลุ่มมีประสิทธิภาพมากขึ้นสำหรับฝูงปลาและเคย แอนตาร์กติก
ดูเหมือนว่าการเว้นระยะห่างอย่างสม่ำเสมอและความสม่ำเสมอของขนาดของปลาในฝูงจะส่งผลให้เกิดประสิทธิภาพทางอุทกพลศาสตร์[ 14 ]แม้ว่าการทดลองในห้องปฏิบัติการในช่วงแรกจะไม่สามารถตรวจพบประโยชน์ทางอุทกพลศาสตร์ที่เกิดจากปลาข้างเคียงในฝูงได้[ 21 ]แต่ก็เชื่อกันว่าประสิทธิภาพที่เพิ่มขึ้นนั้นเกิดขึ้นในธรรมชาติ การทดลองล่าสุดกับกลุ่มปลาที่ว่ายอยู่ในรางน้ำสนับสนุนเรื่องนี้ โดยปลาสามารถลดต้นทุนการว่ายน้ำได้มากถึง 20% เมื่อเทียบกับตอนที่ปลาเหล่านั้นว่ายน้ำอยู่โดดเดี่ยว[ 27 ]แลนดา (1998) โต้แย้งว่าผู้นำของฝูงปลาเปลี่ยนแปลงอยู่ตลอดเวลา เพราะในขณะที่การอยู่ในฝูงให้ข้อได้เปรียบทางอุทกพลศาสตร์ ผู้นำจะเป็นตัวแรกที่เข้าถึงอาหาร[ 15 ]งานวิจัยล่าสุดชี้ให้เห็นว่า หลังจากที่ปลาที่อยู่ด้านหน้าของฝูงพบและกินอาหารมากขึ้นแล้ว พวกมันก็จะเคลื่อนตัวไปด้านหลังของฝูงเนื่องจากข้อจำกัดในการเคลื่อนที่ที่เกิดขึ้นระหว่างการย่อยอาหาร[ 28 ]
การหลีกเลี่ยงผู้ล่า



โดยทั่วไปแล้วพบว่าปลาที่อยู่รวมกันเป็นฝูงมักตกอยู่ในอันตรายจากการถูกกินหากแยกตัวออกจากฝูง[ 5 ]มีการเสนอ หน้าที่ป้องกันผู้ล่าหลายประการ ของฝูงปลา
วิธีการหนึ่งที่เป็นไปได้ที่ฝูงปลาอาจใช้เพื่อป้องกันผู้ล่าคือ "ผลกระทบจากการสับสนของผู้ล่า" ที่เสนอและสาธิตโดย Milinski และ Heller (1978) [ 31 ]ทฤษฎีนี้ตั้งอยู่บนแนวคิดที่ว่าผู้ล่าจะเลือกเหยื่อแต่ละตัวจากกลุ่มได้ยากขึ้น เนื่องจากเป้าหมายที่เคลื่อนที่จำนวนมากทำให้เกิดการรับรู้มากเกินไปในช่องมองภาพของผู้ล่า ผลการค้นพบของ Milinski และ Heller ได้รับการยืนยันทั้งในการทดลอง[ 32 ] [ 33 ]และการจำลองด้วยคอมพิวเตอร์[ 34 ] [ 35 ] "ปลาที่รวมฝูงมีขนาดเท่ากันและมีสีเงิน ดังนั้นจึงเป็นเรื่องยากสำหรับผู้ล่าที่เน้นการมองเห็นที่จะเลือกปลาแต่ละตัวจากฝูงปลาที่บิดตัวและกระพริบแสง และมีเวลาเพียงพอที่จะจับเหยื่อก่อนที่มันจะหายไปในฝูง" [ 5 ]
พฤติกรรมการรวมฝูงทำให้เกิดความสับสนกับอวัยวะเส้นข้างลำตัว (LLO)รวมถึง ระบบ รับรู้ไฟฟ้า (ESS) ของผู้ล่า[ 36 ] [ 37 ] [ 38 ]การเคลื่อนไหวของครีบของปลาตัวเดียวทำหน้าที่เป็นแหล่งกำเนิดคลื่นรูปทรงจุด ปล่อยความลาดชันซึ่งผู้ล่าอาจใช้ในการระบุตำแหน่ง เนื่องจากสนามของปลาหลายตัวจะทับซ้อนกัน การรวมฝูงจึงควรบดบังความลาดชันนี้ อาจเลียนแบบคลื่นความดันของสัตว์ขนาดใหญ่ และมีแนวโน้มที่จะทำให้การรับรู้เส้นข้างลำตัวสับสน[ 36 ] LLO มีความสำคัญในขั้นตอนสุดท้ายของการโจมตีของผู้ล่า[ 39 ]สัตว์ที่รับรู้ไฟฟ้าอาจระบุตำแหน่งแหล่งกำเนิดสนามโดยใช้ความไม่สม่ำเสมอเชิงพื้นที่ เพื่อสร้างสัญญาณที่แยกจากกัน เหยื่อแต่ละตัวต้องอยู่ห่างกันประมาณห้าเท่าของความกว้างลำตัว หากวัตถุอยู่ใกล้กันเกินไปจนไม่สามารถแยกแยะได้ พวกมันจะสร้างภาพที่เบลอ[ 40 ]จากสิ่งนี้จึงมีการเสนอแนะว่าการรวมฝูงอาจทำให้ ESS ของผู้ล่าสับสน[ 36 ]
ผลกระทบต่อต้านผู้ล่าที่อาจเกิดขึ้นประการที่สามของการรวมกลุ่มของสัตว์คือสมมติฐาน "ดวงตามากมาย" ทฤษฎีนี้กล่าวว่าเมื่อขนาดของกลุ่มเพิ่มขึ้น งานในการสแกนสภาพแวดล้อมเพื่อหาผู้ล่าสามารถกระจายไปยังสัตว์หลายตัวได้การทำงานร่วมกันจำนวนมาก นี้ไม่เพียงแต่ จะทำให้มีการเฝ้าระวังที่สูงขึ้นเท่านั้น แต่ยังอาจทำให้มีเวลามากขึ้นสำหรับการหาอาหารของแต่ละตัวอีกด้วย[ 41 ] [ 42 ]
สมมติฐานที่สี่สำหรับผลต่อต้านผู้ล่าของฝูงปลาคือผลของ "การเจือจางการเผชิญหน้า" ผลของเจือจางเป็นการขยายความของความปลอดภัยในจำนวนมากและมีปฏิสัมพันธ์กับผลของความสับสน[ 21 ]การโจมตีของผู้ล่าจะกินปลาในฝูงขนาดใหญ่ในสัดส่วนที่น้อยกว่าฝูงขนาดเล็ก[ 43 ]แฮมิลตันเสนอว่าสัตว์ต่างๆ รวมตัวกันเนื่องจากการหลีกเลี่ยงผู้ล่าอย่าง "เห็นแก่ตัว" และจึงเป็นรูปแบบหนึ่งของการแสวงหาที่กำบัง[ 44 ]ทฤษฎีอีกรูปแบบหนึ่งได้รับการเสนอโดยเทอร์เนอร์และพิตเชอร์ และถูกมองว่าเป็นการผสมผสานระหว่างความน่าจะเป็นในการตรวจจับและการโจมตี[ 45 ]ในส่วนประกอบการตรวจจับของทฤษฎี มีการเสนอแนะว่าเหยื่อที่มีศักยภาพอาจได้รับประโยชน์จากการอยู่ร่วมกัน เนื่องจากผู้ล่ามีโอกาสน้อยที่จะพบกลุ่มเดียวมากกว่าการกระจายตัวแบบกระจัดกระจาย ในส่วนประกอบการโจมตี มีความคิดว่าผู้ล่าที่โจมตีมีโอกาสน้อยที่จะกินปลาตัวใดตัวหนึ่งเมื่อมีปลาจำนวนมากขึ้น โดยสรุป ปลาจะมีข้อได้เปรียบหากอยู่ในกลุ่มที่ใหญ่กว่าในสองกลุ่ม โดยสมมติว่าความน่าจะเป็นของการตรวจจับและการโจมตีจะไม่เพิ่มขึ้นอย่างไม่สมส่วนกับขนาดของกลุ่ม[ 46 ]
ปลาเหยื่อที่รวมฝูงกันนั้นตกเป็นเป้าของการโจมตีจากผู้ล่าอย่างต่อเนื่อง ตัวอย่างเช่น การโจมตีที่เกิดขึ้นระหว่างการอพยพของปลาซาร์ ดีนแอฟริกา การอพยพของปลาซาร์ดีนแอฟริกาเป็นการอพยพที่น่าตื่นตาตื่นใจของปลาซาร์ดีนสีเงินนับล้านตัวตามแนวชายฝั่ง ทางใต้ ของแอฟริกา ในแง่ของชีวมวล การอพยพของปลาซาร์ดีนอาจเทียบได้กับการอพยพครั้งใหญ่ของวิลเดอร์บีสต์ใน แอฟริกาตะวันออก [ 47 ]ปลาซาร์ดีนมีวงจรชีวิตสั้น มีชีวิตอยู่เพียงสองหรือสามปี ปลาซาร์ดีนโตเต็มวัย อายุประมาณสองปี จะรวมตัวกันที่Agulhas Bankซึ่งพวกมันจะวางไข่ในช่วงฤดูใบไม้ผลิและฤดูร้อน โดยปล่อยไข่หลายหมื่นฟองลงในน้ำ จากนั้นปลาซาร์ดีนโตเต็มวัยจะเดินทางเป็นฝูงหลายร้อยฝูงไปยังน่านน้ำกึ่งเขตร้อนของมหาสมุทรอินเดียฝูงปลาขนาดใหญ่อาจยาว 7 กิโลเมตร (4.3 ไมล์) กว้าง 1.5 กิโลเมตร (0.93 ไมล์) และลึก 30 เมตร (98 ฟุต) ฉลาม โลมา ปลาทูน่า ปลากระเบนแมวน้ำเคปเฟอร์และแม้แต่ปลาวาฬเพชฌฆาตจำนวนมหาศาลมารวมตัวกันและติดตามฝูงปลา ทำให้เกิดการแย่งชิงอาหารอย่างดุเดือดตามแนวชายฝั่ง[ 48 ]

เมื่อถูกคุกคาม ปลาซาร์ดีน (และปลาเหยื่อชนิดอื่น ๆ) จะรวมกลุ่มกันโดยสัญชาตญาณและสร้างฝูงเหยื่อ ขนาดใหญ่ ฝูงเหยื่อเหล่านี้อาจมีเส้นผ่านศูนย์กลางถึง 20 เมตร (66 ฟุต) ฝูงเหยื่อเหล่านี้มีอายุสั้น แทบจะไม่คงอยู่นานเกิน 20 นาที ไข่ปลาที่ถูกทิ้งไว้ที่ Agulhas Banks จะลอยไปทางทิศตะวันตกเฉียงเหนือตามกระแสน้ำไปยังน่านน้ำนอกชายฝั่งตะวันตก ซึ่งตัวอ่อนจะพัฒนาเป็นปลาวัยอ่อน เมื่อพวกมันโตพอ พวกมันจะรวมตัวกันเป็นฝูงหนาแน่นและอพยพลงใต้ กลับไปยัง Agulhas Banks เพื่อเริ่มต้นวงจรใหม่[ 48 ]
การพัฒนาพฤติกรรมการรวมกลุ่มน่าจะเกี่ยวข้องกับคุณภาพการรับรู้ที่เพิ่มขึ้น วิถีชีวิตแบบล่าเหยื่อ และกลไกการคัดแยกขนาดเพื่อหลีกเลี่ยงการกินพวกเดียวกัน[ 38 ]ในบรรพบุรุษที่กินอาหารแบบกรอง ก่อนที่การมองเห็นและระบบ octavolateralis (OLS) จะพัฒนาขึ้น ความเสี่ยงจากการถูกล่าจะมีจำกัดและส่วนใหญ่เกิดจากผู้ล่าที่เป็นสัตว์ไม่มีกระดูกสันหลัง ดังนั้นในเวลานั้น ความปลอดภัยจากการรวมกลุ่มกันเป็นจำนวนมากจึงอาจไม่ใช่แรงจูงใจหลักในการรวมตัวกันเป็นฝูงหรือกลุ่มปลา การพัฒนาการมองเห็นและ OLS จะช่วยให้สามารถตรวจจับเหยื่อที่มีศักยภาพได้ ซึ่งอาจนำไปสู่ศักยภาพที่เพิ่มขึ้นของการกินพวกเดียวกันภายในฝูง ในทางกลับกัน คุณภาพการรับรู้ที่เพิ่มขึ้นจะทำให้ปลาขนาดเล็กมีโอกาสหลบหนีหรือไม่อาจเข้าร่วมฝูงกับปลาขนาดใหญ่ได้ มีการแสดงให้เห็นว่าปลาขนาดเล็กหลีกเลี่ยงการเข้าร่วมกลุ่มกับปลาขนาดใหญ่ แม้ว่าปลาขนาดใหญ่จะไม่หลีกเลี่ยงการเข้าร่วมกับปลาขนาดเล็กชนิดเดียวกันก็ตาม[ 49 ]กลไกการคัดแยกนี้ซึ่งอาศัยคุณภาพการรับรู้ที่เพิ่มขึ้นอาจส่งผลให้ขนาดของปลาในฝูงมีความสม่ำเสมอ ซึ่งจะเพิ่มความสามารถในการเคลื่อนที่พร้อมกัน[ 38 ]
มาตรการรับมือผู้ล่า

สัตว์นักล่าได้คิดค้นวิธีการตอบโต้ต่างๆ เพื่อทำลายกลยุทธ์การป้องกันตัวด้วยการรวมฝูงและการต่อสู้เป็นฝูงของปลาเหยื่อปลากระเบนจะยกครีบขึ้นเพื่อให้ดูตัวใหญ่ขึ้นมาก เพื่อที่จะต้อนฝูงปลาหรือปลาหมึก ปลาดาบจะพุ่งเข้าใส่ฝูงปลาเหยื่อด้วยความเร็วสูง ฟาดฟันด้วยดาบเพื่อฆ่าหรือทำให้เหยื่อสลบ จากนั้นพวกมันจะหันกลับมาและกิน "เหยื่อ" ของพวกมันฉลามหางยาวใช้หางยาวของมันเพื่อทำให้ปลาที่รวมฝูงสลบ ก่อนที่จะโจมตี ฉลามจะรวมฝูงเหยื่อโดยการว่ายน้ำรอบๆ และสาดน้ำด้วยหางของมัน มักจะเป็นคู่หรือกลุ่มเล็กๆ ฉลามหางยาวจะว่ายน้ำเป็นวงกลมเพื่อขับไล่เหยื่อที่รวมฝูงให้มารวมกันเป็นกลุ่ม ก่อนที่จะฟาดพวกมันอย่างรวดเร็วด้วยกลีบหางด้านบนเพื่อทำให้พวกมันสลบ[ 50 ] [ 51 ]ฉลามหมุนตัวจะพุ่งเข้าใส่ฝูงในแนวดิ่ง หมุนตัวรอบแกนของตัวเองโดยอ้าปากและงับไปรอบๆ โมเมนตัมของฉลามในช่วงท้ายของการวิ่งวนเป็นเกลียวมักจะพามันขึ้นไปในอากาศ[ 52 ] [ 53 ]
 ปลาอินทรีรวมฝูงกันโดยใช้ครีบหลังของมัน
ปลาอินทรีรวมฝูงกันโดยใช้ครีบหลังของมัน ปลาดาบฟาดฟันด้วยดาบของมัน
ปลาดาบฟาดฟันด้วยดาบของมัน ฉลามหางยาวโจมตีด้วยหางของมัน
ฉลามหางยาวโจมตีด้วยหางของมัน ฉลามสปินเนอร์หมุนตัวรอบแกนยาวของมัน
ฉลามสปินเนอร์หมุนตัวรอบแกนยาวของมัน



![↑ ฝูงโลมาปากขวดธรรมดาร่วมมือกันทำให้ฝูงปลาโดดขึ้นไปในอากาศ ในตำแหน่งที่เปราะบางเช่นนี้ ปลาจึงเป็นเหยื่อง่ายสำหรับโลมา[54]](//upload.wikimedia.org/wikipedia/commons/thumb/2/2e/Barrier_feeding_in_bottlenose_dolphins.jpg/960px-Barrier_feeding_in_bottlenose_dolphins.jpg) ↑ โลมาปากขวดธรรมดากลุ่มหนึ่งร่วมมือกันทำให้ฝูงปลาโดดขึ้นไปในอากาศ ในตำแหน่งที่เปราะบางเช่นนี้ ปลาจึงเป็นเหยื่อง่ายสำหรับโลมา[ 54 ]
↑ โลมาปากขวดธรรมดากลุ่มหนึ่งร่วมมือกันทำให้ฝูงปลาโดดขึ้นไปในอากาศ ในตำแหน่งที่เปราะบางเช่นนี้ ปลาจึงเป็นเหยื่อง่ายสำหรับโลมา[ 54 ]
![↑ ฝูงโลมาปากขวดธรรมดาร่วมมือกันทำให้ฝูงปลาโดดขึ้นไปในอากาศ ในตำแหน่งที่เปราะบางเช่นนี้ ปลาจึงเป็นเหยื่อง่ายสำหรับโลมา[54]](https://upload.wikimedia.org/wikipedia/commons/thumb/2/2e/Barrier_feeding_in_bottlenose_dolphins.jpg/960px-Barrier_feeding_in_bottlenose_dolphins.jpg)
สัตว์นักล่าบางชนิด เช่น โลมา จะล่าเป็นกลุ่ม เทคนิคหนึ่งที่โลมาหลายสายพันธุ์ใช้คือการต้อนฝูงโดยฝูงโลมาจะควบคุมฝูงปลาในขณะที่สมาชิกแต่ละตัวจะผลัดกันไล่ต้อนและกินปลาที่อยู่รวมกันเป็นกลุ่มแน่น (ซึ่งเป็นรูปแบบที่รู้จักกันทั่วไปว่าฝูงเหยื่อ ) การต้อนฝูงเป็นวิธีการที่โลมาไล่ต้อนปลาไปยังน้ำตื้นเพื่อให้จับได้ง่ายขึ้น ในรัฐเซาท์แคโรไลนาโลมาปากขวดแอตแลนติกใช้เทคนิคนี้ไปอีกขั้นด้วยสิ่งที่เรียกว่าการล่าเหยื่อตามชายฝั่ง โดยโลมาจะไล่ต้อนปลาขึ้นไปบนฝั่งโคลนและจับมันจากที่นั่น[ 55 ]
มีการสังเกต โลมาปากขวดธรรมดาโดยใช้เทคนิคอื่น โลมาตัวหนึ่งทำหน้าที่เป็น "ผู้ขับ" และต้อนฝูงปลาไปยังโลมาตัวอื่นๆ อีกหลายตัวที่สร้างเป็นแนวกั้น โลมาผู้ขับจะตบหางทำให้ปลาโดดขึ้นไปในอากาศ ขณะที่ปลาโดด โลมาผู้ขับจะเคลื่อนที่ไปพร้อมกับโลมาที่เป็นแนวกั้นและจับปลาในอากาศ[ 54 ]การแบ่งบทบาทความร่วมมือเฉพาะด้านประเภทนี้ดูเหมือนจะพบได้บ่อยในสัตว์ทะเลมากกว่าสัตว์บกอาจเป็นเพราะมหาสมุทรมีความแปรปรวนมากกว่าในด้านความหลากหลายของเหยื่อชีวมวลและการเคลื่อนที่ของผู้ล่า[ 54 ]
ในช่วงฤดูอพยพของปลาซาร์ดีนโลมามากถึง 18,000 ตัว ทำหน้าที่คล้ายสุนัขต้อนแกะ ต้อนปลาซาร์ดีนให้รวมกันเป็นฝูง หรือต้อนพวกมันในน้ำตื้น เมื่อฝูงปลารวมกันแล้ว โลมาและสัตว์นักล่าอื่นๆ จะผลัดกันไล่ล่าและกินปลาเหล่านั้นอย่างตะกละตะกลาม นกทะเลก็โจมตีพวกมันจากด้านบนเช่นกัน ฝูงนกแกนเน็ตนกคอร์โมแรนต์นกเทิร์นและนกนางนวลนกทะเลบางชนิดดิ่งลงมาจากความสูง 30 เมตร (98 ฟุต) พุ่งผ่านน้ำทิ้งร่องรอยคล้ายไอระเหย คล้ายกับเครื่องบินรบ[ 48 ]นกแกนเน็ตพุ่งลงน้ำด้วยความเร็วสูงสุดถึง 100 กิโลเมตรต่อชั่วโมง (60 ไมล์ต่อชั่วโมง) พวกมันมีถุงลมใต้ผิวหนังบริเวณใบหน้าและหน้าอกซึ่งทำหน้าที่เหมือนแผ่นกันกระแทกช่วยลดแรงกระแทกกับน้ำ
เป็นที่ทราบกันดีว่าประชากร โลมาปากขวด บางกลุ่ม ในมอริเตเนียมีส่วนร่วมในการจับปลาแบบร่วมมือกันระหว่างสายพันธุ์กับชาวประมงมนุษย์ โลมาจะไล่ต้อนฝูงปลาไปยังชายฝั่งที่มนุษย์รออยู่พร้อมกับอวน ในความสับสนของการเหวี่ยงอวน โลมาก็จับปลาได้จำนวนมากเช่นกัน นอกจากนี้ยังพบเทคนิคการหาอาหารแบบร่วมมือกันภายในสายพันธุ์เดียวกัน และบางคนเสนอว่าพฤติกรรมเหล่านี้ถูกส่งต่อผ่านทางวัฒนธรรม Rendell & Whitehead ได้เสนอโครงสร้างสำหรับการศึกษาวัฒนธรรมในวาฬ[ 56 ]
วาฬบางชนิดพุ่งเข้าตะครุบเหยื่อ[ 57 ]การพุ่งเข้าตะครุบเป็นวิธีการกินที่รุนแรง โดยวาฬจะเร่งความเร็วจากใต้ฝูงเหยื่อจนมีความเร็วสูง แล้วอ้าปากกว้างมาก วิธีนี้จะสร้างแรงดันน้ำที่จำเป็นในการขยายปากและกลืนกินและกรองน้ำและปลาจำนวนมหาศาล การพุ่งเข้าตะครุบของวาฬ ขนาดใหญ่ เหล่านี้กล่าวกันว่าเป็น เหตุการณ์ ทางชีวกลศาสตร์ ที่ใหญ่ที่สุด บนโลก[ 58 ]
| วิดีโอภายนอก | |
|---|---|
 วาฬหลังค่อมคู่หนึ่ง ซึ่งเป็นวาฬชนิดหนึ่งในวงศ์วาฬรอร์ควอล กำลังพุ่งตัวลงหาอาหาร
วาฬหลังค่อมคู่หนึ่ง ซึ่งเป็นวาฬชนิดหนึ่งในวงศ์วาฬรอร์ควอล กำลังพุ่งตัวลงหาอาหาร นกแกนเน็ต "ดิ่งลงโจมตี" ด้วยความเร็วสูง
นกแกนเน็ต "ดิ่งลงโจมตี" ด้วยความเร็วสูง


ฝูงปลาเป็นอย่างไร

ฝูงปลาว่ายน้ำเป็นแถวอย่างเป็นระเบียบ โดยบางชนิด เช่น ปลาเฮริง สามารถว่ายขึ้นลงด้วยความเร็วที่น่าประทับใจ บิดตัวไปมา และเปลี่ยนแปลงรูปร่างของฝูงได้อย่างน่าทึ่งโดยไม่ชนกัน ราวกับว่าการเคลื่อนไหวของพวกมันถูกจัดฉากไว้แล้ว แม้ว่าความจริงจะไม่ใช่เช่นนั้นก็ตาม ต้องมีระบบตอบสนองที่รวดเร็วมากเพื่อให้ปลาทำเช่นนี้ได้ ปลาวัยอ่อนฝึกฝนเทคนิคการรวมฝูงเป็นคู่ๆ แล้วจึงรวมฝูงเป็นกลุ่มใหญ่ขึ้นเมื่อเทคนิคและประสาทสัมผัสของพวกมันพัฒนาขึ้น พฤติกรรมการรวมฝูงพัฒนาขึ้นโดยสัญชาตญาณและไม่ได้เรียนรู้จากปลาที่โตกว่า การที่จะรวมฝูงได้เช่นนั้น ปลาจำเป็นต้องมีระบบประสาทสัมผัสที่สามารถตอบสนองต่อการเปลี่ยนแปลงเล็กน้อยในตำแหน่งของพวกมันเมื่อเทียบกับเพื่อนบ้านได้อย่างรวดเร็ว ฝูงปลาส่วนใหญ่จะสูญเสียความสามารถในการรวมฝูงหลังจากมืดลง และจะว่ายเป็นฝูงเล็กๆ เท่านั้น นี่แสดงให้เห็นว่าการมองเห็นมีความสำคัญต่อการรวมฝูง ความสำคัญของการมองเห็นยังแสดงให้เห็นได้จากพฤติกรรมของปลาที่ตาบอดชั่วคราว ปลาที่รวมฝูงจะมีตาอยู่ด้านข้างของหัว ซึ่งหมายความว่าพวกมันสามารถมองเห็นเพื่อนบ้านได้อย่างง่ายดาย นอกจากนี้ ฝูงปลาหลายชนิดมักมี "เครื่องหมายแสดงการรวมฝูง" บนไหล่หรือโคนหาง หรือมีแถบเด่นชัดที่มองเห็นได้ ซึ่งทำหน้าที่เป็นเครื่องหมายอ้างอิงเมื่อรวมฝูง[ 59 ]คล้ายกับเครื่องหมายแบบพาสซีฟในการจับการเคลื่อนไหวเทียม อย่างไรก็ตาม ปลาที่ไม่มีเครื่องหมายเหล่านี้ก็ยังคงมีพฤติกรรมการรวมฝูง[ 60 ]แม้ว่าอาจจะไม่มีประสิทธิภาพเท่าที่ควร
ประสาทสัมผัสอื่นๆ ก็ถูกนำมาใช้เช่นกัน ฟีโรโมนหรือเสียงอาจมีบทบาท แต่ยังไม่พบหลักฐานสนับสนุนเส้นข้างลำตัวเป็นเส้นที่วิ่งไปตามแต่ละด้านของปลาจากฝาเหงือกไปจนถึงโคนหาง ในการทดลองในห้องปฏิบัติการ เส้นข้างลำตัวของปลาที่อยู่รวมกันเป็นฝูงถูกตัดออก พวกมันว่ายน้ำเข้าใกล้กันมากขึ้น นำไปสู่ทฤษฎีที่ว่าเส้นข้างลำตัวให้ข้อมูลกระตุ้นเพิ่มเติมเมื่อปลาเข้าใกล้กันมากเกินไป[ 59 ]ระบบเส้นข้างลำตัวมีความไวต่อการเปลี่ยนแปลงของกระแสน้ำและการสั่นสะเทือนในน้ำมาก มันใช้ตัวรับที่เรียกว่านิวโรมาสต์ซึ่งแต่ละตัวประกอบด้วยกลุ่มของเซลล์ขน เซลล์ขนเหล่านี้ถูกล้อมรอบด้วยคิวพูล่าที่ยื่นออกมาคล้ายวุ้นโดยทั่วไปมีความยาว 0.1 ถึง 0.2 มม. เซลล์ขนในเส้นข้างลำตัวคล้ายกับเซลล์ขนภายในหูชั้นในของสัตว์มีกระดูกสันหลัง ซึ่งบ่งชี้ว่าเส้นข้างลำตัวและหูชั้นในมีต้นกำเนิดร่วมกัน[ 5 ]
การอธิบายโครงสร้างสันดอนทราย
เป็นการยากที่จะสังเกตและอธิบายโครงสร้างสามมิติของฝูงปลาในโลกแห่งความเป็นจริง เนื่องจากมีปลาจำนวนมาก เทคนิคต่างๆ รวมถึงการใช้ความก้าวหน้าล่าสุดในด้านเสียงใต้น้ำเพื่อการประมง[ 61 ]
ปัจจัยที่ใช้กำหนดฝูงปลา ได้แก่:
- ขนาดฝูงปลา – จำนวนปลาในฝูง มีการใช้เทคนิคการสำรวจระยะไกลใกล้ขอบไหล่ทวีปนอกชายฝั่งตะวันออกของอเมริกาเหนือเพื่อถ่ายภาพฝูงปลา ฝูงปลาเหล่านี้ – ซึ่งส่วนใหญ่น่าจะประกอบด้วยปลาเฮริ่งแอตแลนติก ปลาสกัป ปลาเฮกและปลากะพงดำ – กล่าวกันว่ามีปลาอยู่ "หลายสิบล้านตัว" และทอดยาวเป็น "หลายกิโลเมตร" [ 62 ]
- ความหนาแน่น – ความหนาแน่นของฝูงปลาคือจำนวนปลาหารด้วยปริมาตรที่ฝูงปลาครอบครอง ความหนาแน่นไม่จำเป็นต้องคงที่ตลอดทั้งกลุ่ม โดยทั่วไปแล้วปลาในฝูงจะมีความหนาแน่นประมาณหนึ่งตัวต่อลูกบาศก์ของความยาวลำตัว[ 63 ]
 ความหนาแน่นต่ำ
ความหนาแน่นต่ำ ความหนาแน่นสูง
ความหนาแน่นสูง ขั้วต่ำ
ขั้วต่ำ ขั้วสูง
ขั้วสูง




- ขั้ว – ขั้วกลุ่มอธิบายถึงขอบเขตที่ปลาทั้งหมดชี้ไปในทิศทางเดียวกัน เพื่อกำหนดพารามิเตอร์นี้ จะต้องกำหนดทิศทางเฉลี่ยของสัตว์ทั้งหมดในกลุ่ม จากนั้นจึงหาความแตกต่างเชิงมุมระหว่างทิศทางของสัตว์แต่ละตัวกับทิศทางของกลุ่ม ขั้วกลุ่มคือค่าเฉลี่ยของความแตกต่างเหล่านี้[ 64 ]
- ระยะห่างระหว่างปลาตัวใกล้ที่สุด – ระยะห่างระหว่างปลาตัวใกล้ที่สุด (NND) คือระยะห่างระหว่างจุดศูนย์กลางมวลของปลาตัวหนึ่ง (ปลาเป้าหมาย) กับจุดศูนย์กลางมวลของปลาที่อยู่ใกล้ปลาเป้าหมายที่สุด สามารถหาค่าพารามิเตอร์นี้สำหรับปลาแต่ละตัวในกลุ่ม แล้วนำมาหาค่าเฉลี่ย ต้องระมัดระวังในการพิจารณาปลาที่อยู่บริเวณขอบของกลุ่มปลา เนื่องจากปลาเหล่านี้ไม่มีปลาตัวอื่นอยู่ใกล้ในทิศทางใดทิศทางหนึ่ง นอกจากนี้ NND ยังมีความสัมพันธ์กับความหนาแน่นของการรวมกลุ่ม สำหรับปลาที่อยู่รวมกันเป็นฝูง NND มักจะอยู่ระหว่างครึ่งหนึ่งถึงหนึ่งความยาวลำตัว
- ตำแหน่งเพื่อนบ้านที่ใกล้ที่สุด – ในระบบพิกัดเชิงขั้ว ตำแหน่งเพื่อนบ้านที่ใกล้ที่สุดจะอธิบายถึงมุมและระยะห่างของเพื่อนบ้านที่ใกล้ที่สุดกับปลาเป้าหมาย
- เศษส่วนการบรรจุ – เศษส่วนการบรรจุเป็นพารามิเตอร์ที่ยืมมาจากฟิสิกส์เพื่อกำหนดการจัดระเบียบ (หรือสถานะ เช่น ของแข็ง ของเหลว หรือก๊าซ) ของกลุ่มปลา 3 มิติ เป็นการวัดทางเลือกแทนความหนาแน่น ในพารามิเตอร์นี้ การรวมกลุ่มจะถูกทำให้เป็นอุดมคติเป็นกลุ่มของทรงกลมแข็ง โดยที่ปลาแต่ละตัวอยู่ตรงกลางของทรงกลม เศษส่วนการบรรจุถูกกำหนดให้เป็นอัตราส่วนของปริมาตรทั้งหมดที่ทรงกลมแต่ละลูกครอบครอง หารด้วยปริมาตรโดยรวมของการรวมกลุ่ม ค่าอยู่ในช่วงตั้งแต่ศูนย์ถึงหนึ่ง โดยเศษส่วนการบรรจุที่น้อยแสดงถึงระบบที่เจือจาง เช่น ก๊าซ[ 65 ]
- ความหนาแน่นแบบมีเงื่อนไขแบบบูรณาการ – พารามิเตอร์นี้วัดความหนาแน่นที่ระดับความยาวต่างๆ และอธิบายถึงความสม่ำเสมอของความหนาแน่นทั่วทั้งกลุ่มสัตว์[ 65 ]
- ฟังก์ชันการกระจายคู่ – พารามิเตอร์นี้มักใช้ในฟิสิกส์เพื่อกำหนดลักษณะระดับของระเบียบเชิงพื้นที่ในระบบของอนุภาค นอกจากนี้ยังอธิบายถึงความหนาแน่น แต่การวัดนี้อธิบายถึงความหนาแน่นที่ระยะห่างจากจุดที่กำหนด Cavagna et al. พบว่าฝูงนกสตาร์ลิงมีโครงสร้างมากกว่าก๊าซแต่มีโครงสร้างน้อยกว่าของเหลว[ 65 ]
การเป็นแบบอย่างที่ดีในโรงเรียน


{kind=link}
{kind=link}
แบบจำลองทางคณิตศาสตร์
วิธีการสังเกตการณ์ได้รับการเสริมด้วยการสร้างแบบจำลองทางคณิตศาสตร์ของฝูงสัตว์ แบบจำลองทางคณิตศาสตร์ที่ใช้กันทั่วไปของฝูงสัตว์จะกำหนดให้สัตว์แต่ละตัวปฏิบัติตามกฎสามข้อ:
- เคลื่อนที่ไปในทิศทางเดียวกับเพื่อนบ้านของคุณ
- จงรักษาความสัมพันธ์ที่ดีกับเพื่อนบ้าน
- หลีกเลี่ยงการชนกับเพื่อนบ้าน
ตัวอย่างของการจำลองดังกล่าวคือ โปรแกรม boidsที่สร้างโดยCraig Reynoldsในปี 1986 [ 67 ]อีกตัวอย่างหนึ่งคือ แบบจำลอง อนุภาคขับเคลื่อนด้วยตนเองที่Vicsek et al. นำเสนอ ในปี 1995 [ 68 ]แบบจำลองปัจจุบันจำนวนมากใช้การเปลี่ยนแปลงของกฎเหล่านี้ ตัวอย่างเช่น แบบจำลองจำนวนมากใช้กฎทั้งสามนี้ผ่านโซนแบบชั้นรอบปลาแต่ละตัว
- ในบริเวณที่เกิดแรงผลักซึ่งอยู่ใกล้กับปลามาก ปลาเป้าหมายจะพยายามรักษาระยะห่างจากปลาตัวอื่นๆ เพื่อหลีกเลี่ยงการชนกัน
- ในบริเวณที่อยู่ห่างออกไปเล็กน้อย ปลาเป้าหมายจะพยายามปรับทิศทางการเคลื่อนที่ของตนให้สอดคล้องกับปลาตัวอื่นๆ ที่อยู่ใกล้เคียง
- ในบริเวณที่ดึงดูดมากที่สุด ซึ่งแผ่ขยายออกไปไกลที่สุดเท่าที่ปลาเป้าหมายจะรับรู้ได้ ปลาเป้าหมายจะพยายามเคลื่อนที่เข้าหาปลาตัวอื่นที่อยู่ใกล้เคียง
รูปร่างของโซนเหล่านี้จะได้รับผลกระทบจากความสามารถในการรับรู้ของปลาอย่างหลีกเลี่ยงไม่ได้ ปลาอาศัยทั้งการมองเห็นและสัญญาณทางอุทกพลศาสตร์ที่ส่งผ่านทางเส้นข้างลำตัวในขณะที่กุ้งคริลล์แอนตาร์กติกอาศัยทั้งการมองเห็นและสัญญาณทางอุทกพลศาสตร์ที่ส่งผ่านทางหนวด ของ มัน
ในวิทยานิพนธ์ระดับปริญญาโทที่ตีพิมพ์ในปี 2551 Moshi Charnell ได้สร้างพฤติกรรมการศึกษาโดยไม่ใช้ส่วนประกอบการจับคู่การจัดเรียงของพฤติกรรมของแต่ละบุคคล[ 69 ] โมเดลของเขาลดกฎพื้นฐานสามข้อเหลือเพียงสองข้อดังต่อไปนี้:
- จงรักษาความสัมพันธ์ที่ดีกับเพื่อนบ้าน
- หลีกเลี่ยงการชนกับเพื่อนบ้าน
ในบทความที่ตีพิมพ์ในปี 2552 นักวิจัยจากไอซ์แลนด์ได้เล่าถึงการประยุกต์ใช้แบบจำลองอนุภาคที่มีปฏิสัมพันธ์กับประชากรปลาแคปลินรอบไอซ์แลนด์ และสามารถทำนายเส้นทางการอพยพเพื่อวางไข่ในปี 2551 ได้สำเร็จ[ 70 ]
แบบจำลองวิวัฒนาการ
เพื่อให้เข้าใจถึงสาเหตุที่สัตว์วิวัฒนาการพฤติกรรมการรวมฝูงนักวิทยาศาสตร์จึงหันมาใช้แบบจำลองวิวัฒนาการที่จำลองประชากรของสัตว์ที่กำลังวิวัฒนาการ โดยทั่วไปแล้ว การศึกษาเหล่านี้จะใช้อัลกอริทึมทางพันธุกรรมเพื่อจำลองวิวัฒนาการในหลายชั่วอายุคนในแบบจำลอง การศึกษาเหล่านี้ได้ตรวจสอบสมมติฐานหลายประการที่อธิบายว่าเหตุใดสัตว์จึงวิวัฒนาการพฤติกรรมการรวมฝูง เช่นทฤษฎีฝูงที่เห็นแก่ตัว [ 71 ] [ 72 ] [ 73 ] [ 74 ]ผลกระทบจากความสับสนของผู้ล่า[ 35 ] [ 75 ]ผลกระทบจากการเจือจาง[ 76 ] [ 77 ]และทฤษฎีดวงตาหลายดวง[ 78 ]
การทำแผนที่การก่อตั้งโรงเรียน
ในปี พ.ศ. 2552 โดยอาศัยความก้าวหน้าล่าสุดในการสร้างภาพอะคูสติก[ 61 ] [ 79 ]กลุ่ม นักวิจัย จาก MITได้สังเกตเห็น "การก่อตัวและการอพยพของฝูงปลาขนาดใหญ่เป็นครั้งแรก" [ 80 ]ผลลัพธ์ดังกล่าวเป็นการยืนยันภาคสนามครั้งแรกของทฤษฎีทั่วไปเกี่ยวกับพฤติกรรมของกลุ่มขนาดใหญ่ ตั้งแต่ฝูงตั๊กแตนไปจนถึงฝูงนก[ 81 ]
นักวิจัยได้บันทึกภาพการวางไข่ของปลาเฮริงแอตแลนติกนอกชายฝั่งGeorges Bankพวกเขาพบว่าปลาเหล่านี้มารวมตัวกันจากน้ำลึกในช่วงเย็น โดยรวมตัวกันเป็นฝูงอย่างไม่เป็นระเบียบ ปฏิกิริยาลูกโซ่จะเกิดขึ้นเมื่อความหนาแน่นของประชากรถึงค่าวิกฤต เหมือนกับคลื่นผู้ชมที่เคลื่อนที่ไปรอบๆ สนามกีฬา จากนั้นจะเกิดการเปลี่ยนแปลงอย่างรวดเร็ว และปลาจะรวมกลุ่มกันอย่างเป็นระเบียบและประสานกันในลักษณะของฝูงปลา หลังจากการเปลี่ยนแปลง ฝูงปลาจะเริ่มอพยพ ขยายออกไปไกลถึง 40 กิโลเมตร (25 ไมล์) ข้ามมหาสมุทรไปยังส่วนตื้นของธนาคาร ที่นั่นพวกมันจะวางไข่ในเวลากลางคืน ในตอนเช้า ฝูงปลาจะกลับไปยังน้ำลึกอีกครั้งแล้วแยกย้ายกันไป นอกจากนี้ยังพบกลุ่มผู้นำขนาดเล็กที่มีอิทธิพลอย่างมากต่อกลุ่มที่ใหญ่กว่ามาก[ 81 ]
ความเป็นผู้นำและการตัดสินใจ
ฝูงปลาต้องเผชิญกับการตัดสินใจที่พวกมันต้องทำหากต้องการอยู่รวมกัน ตัวอย่างเช่น การตัดสินใจอาจเป็นการเลือกทิศทางที่จะว่ายน้ำเมื่อเผชิญหน้ากับผู้ล่า พื้นที่ที่จะหยุดพักและหาอาหาร หรือเวลาและสถานที่ที่จะอพยพ[ 82 ]
การรับรู้แบบควอรัมสามารถทำหน้าที่เป็นกระบวนการตัดสินใจร่วมกันในระบบกระจายอำนาจ ใดๆ ก็ได้ การตอบสนองแบบควอรัมได้รับการนิยามว่า "การเพิ่มขึ้นอย่างรวดเร็วของความน่าจะเป็นที่สมาชิกกลุ่มจะแสดงพฤติกรรมที่กำหนด เมื่อจำนวนขั้นต่ำของสมาชิกกลุ่มที่แสดงพฤติกรรมนั้นเกินกว่าเกณฑ์" [ 83 ]การวิจัยล่าสุดแสดงให้เห็นว่ากลุ่มปลาขนาดเล็กใช้การตัดสินใจแบบฉันทามติเมื่อตัดสินใจว่าจะติดตามแบบจำลองปลาตัวใด ปลาทำเช่นนี้โดยใช้กฎควอรัมง่ายๆ โดยที่แต่ละตัวจะสังเกตการตัดสินใจของตัวอื่นๆ ก่อนที่จะตัดสินใจของตนเอง เทคนิคนี้โดยทั่วไปส่งผลให้เกิดการตัดสินใจที่ 'ถูกต้อง' แต่บางครั้งก็อาจนำไปสู่การตัดสินใจที่ 'ไม่ถูกต้อง' นอกจากนี้ เมื่อขนาดของกลุ่มเพิ่มขึ้น ปลาจะตัดสินใจได้แม่นยำมากขึ้นในการติดตามแบบจำลองปลาที่น่าดึงดูดใจกว่า[ 84 ]การตัดสินใจแบบฉันทามติ ซึ่งเป็นรูปแบบหนึ่งของสติปัญญาแบบรวมหมู่จึงใช้ข้อมูลจากหลายแหล่งอย่างมีประสิทธิภาพเพื่อให้ได้ข้อสรุปที่ถูกต้องโดยทั่วไป พฤติกรรมดังกล่าวได้รับการแสดงให้เห็นแล้วในพฤติกรรมการรวมฝูงของปลาหนามสามแฉก[ 83 ]
คำถามเปิดอื่นๆ เกี่ยวกับพฤติกรรมการรวมฝูง ได้แก่ การระบุว่าปลาตัวใดเป็นผู้รับผิดชอบในการกำหนดทิศทางการเคลื่อนที่ของฝูง การสังเกตพฤติกรรมการหาอาหารของปลาโกลเด้นไชเนอร์ ( ปลาชนิดหนึ่ง) ที่เลี้ยงในกรง พบว่าพวกมันรวมฝูงกันโดยมีปลาที่มีประสบการณ์จำนวนน้อยเป็นผู้นำ ซึ่งปลาเหล่านี้รู้ว่าเมื่อใดและที่ไหนมีอาหาร[ 85 ]หากปลาโกลเด้นไชเนอร์ทั้งหมดในฝูงมีความรู้เกี่ยวกับความพร้อมของอาหารที่คล้ายคลึงกัน ก็ยังมีปลาเพียงไม่กี่ตัวที่ยังคงเป็นผู้นำตามธรรมชาติ (อยู่ด้านหน้าบ่อยกว่า) และการทดสอบพฤติกรรมชี้ให้เห็นว่าพวกมันมีความกล้าหาญตามธรรมชาติมากกว่า[ 86 ] ปลาโกลเด้นไชเนอร์ตัวเล็กดูเหมือนจะเต็มใจที่จะอยู่ใกล้ด้านหน้าของฝูงมากกว่าตัวที่ใหญ่กว่า อาจเป็นเพราะพวกมันหิวกว่า[ 87 ]การสังเกตปลาโรชทั่วไปแสดงให้เห็นว่าปลาที่ขาดแคลนอาหารมักจะอยู่ด้านหน้าของฝูง ซึ่งพวกมันจะได้รับอาหารมากขึ้น[ 88 ] [ 89 ] แต่พวกมันก็อาจเสี่ยงต่อการถูกล่าจากสัตว์นักล่ามากขึ้นด้วย[ 90 ]บุคคลที่ระมัดระวังการถูกล่ามักจะแสวงหาตำแหน่งที่อยู่ตรงกลางฝูงมากขึ้น[ 91 ]
ทางเลือกของฝูงปลา

การศึกษาทดลองเกี่ยวกับความชอบของฝูงปลาค่อนข้างง่ายที่จะทำ โดยนำตู้ปลาที่มีปลาตัวหนึ่งกำลังเลือกฝูงอยู่ มาวางไว้ระหว่างตู้ปลาอีกสองตู้ที่มีฝูงปลาต่างกัน และสันนิษฐานว่าปลาตัวนั้นจะใช้เวลาอยู่ใกล้กับฝูงปลาที่มันชอบมากกว่า การศึกษาในลักษณะนี้ได้ระบุปัจจัยหลายอย่างที่สำคัญต่อความชอบของฝูงปลา
โดยทั่วไปแล้วปลาชอบอยู่รวมกันเป็นฝูงใหญ่[ 92 ] [ 93 ]ซึ่งก็สมเหตุสมผล เพราะฝูงใหญ่มักจะให้การป้องกันจากผู้ล่าได้ดีกว่า อันที่จริง ความชอบฝูงใหญ่ดูเหมือนจะยิ่งมากขึ้นเมื่อมีผู้ล่าอยู่ใกล้ๆ[ 94 ] [ 95 ]หรือในสายพันธุ์ที่พึ่งพาการรวมฝูงมากกว่าเกราะป้องกันตัวจากการถูกล่า[ 96 ]ฝูงใหญ่อาจหาอาหารได้เร็วกว่า แม้ว่าอาหารนั้นจะต้องแบ่งปันกันในหมู่ปลาจำนวนมากขึ้นก็ตาม การแข่งขันอาจหมายความว่าปลาที่หิวโหยอาจชอบฝูงเล็กกว่า หรือแสดงความชอบฝูงใหญ่น้อยลง ดังที่พบได้ในปลาหนาม[ 97 ] [ 98 ]
ปลาชอบรวมฝูงกับปลาชนิดเดียวกัน บางครั้งอาจมีปลาหลายชนิดปะปนกันในฝูงเดียว แต่เมื่อมีผู้ล่าเข้ามาในฝูง ปลาจะจัดระเบียบตัวเองใหม่เพื่อให้แต่ละตัวอยู่ใกล้กับสมาชิกในสายพันธุ์เดียวกันมากขึ้น[ 99 ]
ปลาส่วนใหญ่มักชอบอยู่รวมกันเป็นฝูงที่มีขนาดใกล้เคียงกัน[ 100 ] [ 101 ] [ 102 ]ซึ่งก็สมเหตุสมผล เพราะผู้ล่าจะจับปลาตัวที่โดดเด่นในฝูงได้ง่ายกว่า ปลาบางชนิดอาจชอบอยู่รวมกันเป็นฝูงของปลาชนิดอื่น หากนั่นหมายถึงขนาดตัวที่ใกล้เคียงกันมากขึ้น[ 103 ]อย่างไรก็ตาม สำหรับขนาดของฝูง ความหิวโหยอาจส่งผลต่อความชอบของปลาที่มีขนาดใกล้เคียงกัน ตัวอย่างเช่น ปลาขนาดใหญ่อาจชอบอยู่รวมกับปลาขนาดเล็กกว่า เพราะจะได้เปรียบในการแข่งขันกับปลาตัวอื่นๆ ในปลาโกลเด้นไชเนอร์ปลาขนาดใหญ่ที่อิ่มแล้วจะชอบอยู่รวมกับปลาขนาดใหญ่ตัวอื่นๆ แต่ปลาที่หิวโหยจะชอบอยู่รวมกับปลาขนาดเล็กกว่า[ 104 ]
ปลาชอบรวมฝูงกับปลาตัวอื่นที่ปลาตัวนั้นคุ้นเคยอยู่แล้ว มีการแสดงให้เห็นแล้วในปลาหางนกยูง [ 105 ] [ 106 ] ปลาหนามสามแฉก [ 107 ] ปลาคิลลิฟิชลายแถบ [ 108 ]ปลาเซิร์ฟเพิร์ช Embiotoca jacksoni [ 109 ] ปลาเตต ร้าเม็กซิกัน[ 110 ]และปลาเล็กชนิดต่างๆ[ 111 ] [ 112 ] การศึกษาเกี่ยวกับปลาเล็กไวท์คลาวด์เมาน์เทนยังพบว่าปลาที่เลือกจะชอบรวมฝูงกับปลาตัวอื่นที่กินอาหารชนิดเดียวกัน[ 113 ]
ปลาหนามและปลาคิลลิฟิชแสดงให้เห็นว่าชอบฝูงที่ประกอบด้วยปลาที่มีสุขภาพดีมากกว่าฝูงที่ติดปรสิต โดยพิจารณาจากสัญญาณที่มองเห็นได้ของการติดปรสิตและพฤติกรรมที่ผิดปกติของปลาที่ติดปรสิต[ 114 ] [ 115 ] [ 116 ] [ 117 ] ปลาซีบร้าฟิชชอบฝูงที่ประกอบด้วยปลาที่อิ่มท้อง (มีกระเพาะอาหารกว้างกว่า) มากกว่าฝูงที่อดอาหาร[ 118 ]
ปลาหนามสามแฉกชอบเข้าร่วมฝูงที่ประกอบด้วยตัวที่กล้าหาญมากกว่าตัวที่ขี้อาย[ 119 ]ปลาแองเจิลชอบฝูงที่ประกอบด้วยตัวที่ด้อยกว่ามากกว่าตัวที่เหนือกว่า[ 120 ]ปลาซิวยุโรปสามารถแยกแยะระหว่างฝูงที่ประกอบด้วยคู่แข่งที่เก่งกับคู่แข่งที่อ่อนแอได้ แม้ว่าจะไม่มีสัญญาณที่ชัดเจน เช่น ความแตกต่างในด้านความก้าวร้าว ขนาด หรืออัตราการกินอาหาร พวกมันชอบที่จะอยู่ร่วมกับคู่แข่งที่อ่อนแอกว่า[ 121 ]ทั้งหมดนี้ชี้ให้เห็นถึงกลยุทธ์ในการหาอาหาร เนื่องจากตัวที่กล้าหาญกว่าน่าจะหาอาหารเจอได้มากกว่า ในขณะที่ตัวที่ด้อยกว่าจะแข่งขันกับอาหารที่ค้นพบได้น้อยกว่า
ปลาชอบเข้าร่วมฝูงที่กำลังหาอาหารอย่างกระตือรือร้น[ 122 ] [ 123 ] ปลา โกลเด้นไชเนอร์ยังสามารถตรวจจับกิจกรรมที่คาดการณ์ไว้ของฝูงที่คาดว่าจะได้รับอาหารในไม่ช้า และเข้าร่วมฝูงดังกล่าวเป็นพิเศษ[ 124 ]ปลาซีบร้าก็เลือกฝูงที่มีกิจกรรมมากกว่า เช่นกัน [ 125 ]
การประมงเชิงพาณิชย์
พฤติกรรมการรวมฝูงของปลาถูกนำมาใช้ประโยชน์ในระดับอุตสาหกรรมโดย อุตสาหกรรม การประมงเชิงพาณิชย์ เรือ ประมงขนาดใหญ่ใช้เครื่องบินตรวจการณ์เพื่อค้นหาฝูงปลา เช่น ปลาทูน่า ปลาค็อด ปลาแมคเคอเรล และปลาเหยื่อ พวกเขาสามารถจับฝูงปลาขนาดใหญ่ได้โดยการล้อมฝูงปลาอย่างรวดเร็วด้วยอวนล้อมโดยอาศัยเรือช่วยที่เร็วและระบบโซนาร์ที่ทันสมัย ซึ่งสามารถติดตามรูปร่างของฝูงปลาได้
ตัวอย่างเพิ่มเติม

ปลา แบล็กสมิธอาศัยอยู่รวมกันเป็นฝูงหลวมๆ พวกมันมีความสัมพันธ์แบบพึ่งพาอาศัยกันกับปลาเซนอริตาซึ่งกินปรสิต เมื่อพวกมันพบกับฝูงปลาเซนอริตา พวกมันจะหยุดและรวมตัวกันเป็นก้อนกลมแน่น แล้วห้อยหัวลง (ดังภาพ) โดยแต่ละตัวจะรอคิวให้ปลาเซนอริตาทำความสะอาด ปลาเซนอริตาจะจิกกินเนื้อเยื่อที่ตายแล้วและปรสิตภายนอก เช่น โคพีคอดและไอโซคอด ออกจากผิวหนังของปลาตัวอื่นๆ
ฝูงปลาบางฝูงมีพฤติกรรมรวมกลุ่มกันโจมตีกันตัวอย่างเช่นปลาบลูจิลล์สร้างอาณานิคมทำรังขนาดใหญ่และบางครั้งก็โจมตีเต่าสแนปปิ้งซึ่งอาจทำหน้าที่ประกาศการมีอยู่ของพวกมัน ขับไล่ผู้ล่าออกจากพื้นที่ หรือช่วยในการถ่ายทอดการจดจำผู้ล่าทางวัฒนธรรม[ 126 ]
ปลาปิรันย่ามีชื่อเสียงว่าเป็นปลาที่ไม่เกรงกลัวและล่าเหยื่อเป็นฝูงอย่างดุร้าย อย่างไรก็ตาม การวิจัยล่าสุดซึ่ง "เริ่มต้นด้วยสมมติฐานที่ว่าพวกมันรวมฝูงกันเพื่อล่าเหยื่อร่วมกัน" พบว่าแท้จริงแล้วพวกมันเป็นปลาที่ค่อนข้างขี้กลัวเช่นเดียวกับปลาชนิดอื่นๆ ที่รวมฝูงกันเพื่อป้องกันตัวเองจากผู้ล่า เช่น นกคormorant จระเข้เคย์แมน และโลมา ปลาปิรันย่า "โดยพื้นฐานแล้วก็เหมือนปลาทั่วไปที่มีฟันขนาดใหญ่" [ 127 ]
ปลาหมึกฮัมโบลต์เป็นสัตว์ไม่มีกระดูกสันหลังในทะเลขนาดใหญ่ที่กินเนื้อเป็นอาหาร อาศัยอยู่รวมกันเป็นฝูงได้มากถึง 1,200 ตัว พวกมันว่ายน้ำด้วยความเร็วสูงสุดถึง 24 กิโลเมตรต่อชั่วโมง (15 ไมล์ต่อชั่วโมง หรือ 13 นอต) โดยใช้แรงดันน้ำที่พ่นออกมาทางท่อดูดและครีบรูปสามเหลี่ยมสองอันหนวด ของพวกมัน มีปุ่มดูดที่เรียงรายไปด้วยฟันแหลมคม ซึ่งใช้จับเหยื่อและลากเข้าหาปากที่แหลมคมขนาดใหญ่ ในเวลากลางวัน ปลาหมึกฮัมโบลต์มีพฤติกรรมคล้ายกับปลาที่อาศัยอยู่ในน้ำลึกปานกลางโดยอาศัยอยู่ที่ความลึก 200 ถึง 700 เมตร (660 ถึง 2,300 ฟุต) การติดแท็กอิเล็กทรอนิกส์แสดงให้เห็นว่าพวกมันยังมีการอพยพในแนวดิ่งตามรอบวันซึ่งทำให้พวกมันขึ้นมาใกล้ผิวน้ำมากขึ้นตั้งแต่พลบค่ำถึงรุ่งเช้า[ 128 ]พวกมันออกล่าใกล้ผิวน้ำในเวลากลางคืน โดยใช้ประโยชน์จากความมืดเพื่อใช้สายตาที่เฉียบคมในการหาเหยื่อที่มีจำนวนมากกว่า ปลาหมึกกินปลา ขนาด เล็กกุ้งปูและโคพีพอ ดเป็นอาหารหลัก และล่าเหยื่อร่วมกัน ซึ่งเป็นการสังเกตพฤติกรรมดังกล่าวในสัตว์ไม่มีกระดูกสันหลังเป็นครั้งแรก[ 129 ] ปลาหมึกฮัมโบลต์ยังเป็นที่รู้จักกันดีว่าสามารถกินเหยื่อขนาดใหญ่ได้อย่างรวดเร็วเมื่อล่าเป็นกลุ่มร่วมกัน ปลาหมึกฮัมโบลต์ขึ้นชื่อเรื่องความเร็วในการกินปลาที่ติดเบ็ด ฉลาม และปลาหมึกด้วยกันเอง แม้กระทั่งจากสายพันธุ์และฝูงเดียวกัน[ 130 ]และเป็นที่รู้กันว่าพวกมันโจมตีชาวประมงและนักดำน้ำ[ 131 ]
ดูเพิ่มเติม
หมายเหตุ
- ^คำนามรวมอื่นๆ ที่ใช้เรียกปลา ได้แก่ปลา (daught of fish),ฝูงปลา (draught of fish) หรือ เกล็ดปลา (scale of fish) ส่วนคำนามรวมที่ใช้เรียกปลาหรือสัตว์ทะเลชนิดใดชนิดหนึ่งโดยเฉพาะ ได้แก่ฝูงปลาแบล็กฟิช (grind of blackfish), ฝูงปลาทอง ( troubling of goldfish) , ฝูงปลาเฮอริ่ง (glean of herrings ), ฝูงปลาแซลมอน (bind or run of salmon), ฝูงปลาฉลาม (shiver of sharks),ฝูงปลากระเบน (fever of stingrays), ฝูงปลานิล ( taint of tilapia), ฝูงปลาเทราต์ ( hover of trouts) และ ฝูงวาฬ (pod of whales)
- ^การรวมกลุ่มเป็นกรณีพิเศษของการรวมกลุ่ม และการรวมฝูงเป็นกรณีพิเศษของการรวมกลุ่ม แม้ว่าการรวมฝูงและการรวมฝูงจะมีความหมายต่างกันในทางชีววิทยา แต่โดยทั่วไปแล้วผู้ที่ไม่ใช่ผู้เชี่ยวชาญมักจะใช้คำทั้งสองนี้แทนกันได้ โดยผู้พูดภาษาอังกฤษ แบบบริติช มักใช้คำว่า "shoaling" เพื่ออธิบายการรวมกลุ่มของปลาทุกกลุ่ม ในขณะที่ผู้พูดภาษาอังกฤษแบบอเมริกันมักใช้คำว่า "schooling" ในความหมายที่ไม่เคร่งครัดเช่นกัน [ 1 ]
Further reading
- Bonabeau, E; Dagorn, L (1995). "Possible universality in the size distribution of fish schools"(PDF). Physical Review. 51 (6): R5220–R5223. Bibcode:1995PhRvE..51.5220B. doi:10.1103/physreve.51.r5220. PMID 9963400.
- Boinski S และ Garber PA (2000) On the Move: How and why Animals Travel in Groupsสำนักพิมพ์มหาวิทยาลัยชิคาโกISBN 978-0-226-06339-3
- Breder, CM (1954). "สมการที่อธิบายฝูงปลาและการรวมกลุ่มของสัตว์อื่นๆ". นิเวศวิทยา35 ( 3): 361– 370. Bibcode : 1954Ecol...35..361B . doi : 10.2307/1930099 . JSTOR 1930099 .
- Childress S (1981) กลศาสตร์ของการว่ายน้ำและการบินกลศาสตร์ของการว่ายน้ำและการบินสำนักพิมพ์มหาวิทยาลัยเคมบริดจ์ISBN 978-0-521-28071-6
- Camazine S, Deneubourg JL, Franks NR , Sneyd J, Theraulaz G และ Bonabeau E (2003) การจัดระเบียบตนเองในระบบชีวภาพสำนักพิมพ์มหาวิทยาลัยพรินซ์ตันISBN 978-0-691-11624-2– โดยเฉพาะบทที่ 11
- อีแวนส์ เอสอาร์; ฟินเนีย, เอ็ม; มานิกา เอ. (2007) "การตั้งค่าการตื้นเขินในสัตว์จำพวกกุ้งเดคาพอด" พฤติกรรมของสัตว์ . 74 (6): 1691– 1696. Bibcode : 2007AnBeh..74.1691E . ดอย : 10.1016/j.anbehav.2007.03.017 . S2CID 53150496 .
- Delcourt, J; Poncin, P (2012). "ฝูงปลาและกลุ่มปลา: กลับสู่คำจำกัดความเชิงอนุมานและการอ้างอิงเชิงปริมาณ" Reviews in Fish Biology and Fisheries . 22 (3): 595– 619. Bibcode : 2012RFBF...22..595D . doi : 10.1007/s11160-012-9260-z . S2CID 18306602 .
- Gautrais, J., Jost, C. & Theraulaz, G. (2008) ปัจจัยพฤติกรรมที่สำคัญในแบบจำลองฝูงปลาที่จัดระเบียบตนเอง Annales Zoologici Fennici 45: 415–428
- Godin, JJ (1997) นิเวศวิทยาเชิงพฤติกรรมของปลาเทเลออสท์สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด ISBN 978-0-19-850503-7
- Ghosh S และ Ramamoorthy CV (2004) การออกแบบระบบเทคโนโลยีสารสนเทศแบบเครือข่าย Springer. ISBN 978-0-387-95544-5
- Hager, MC; Helfman, GS (1991). "ความปลอดภัยในจำนวนมาก: การเลือกขนาดฝูงของปลาเล็กภายใต้ภัยคุกคามจากผู้ล่า" พฤติกรรมนิเวศวิทยาและสังคมชีววิทยา 29 ( 4): 271– 276. Bibcode : 1991BEcoS..29..271H . doi : 10.1007/BF00163984 . S2CID 30901973 .
- Hemelrijk, CK; Hildenbrandt, H; Reinders, J; Stamhuis, EJ (2010). "การเกิดขึ้นของรูปร่างฝูงปลาทรงยาว: แบบจำลองและข้อมูลเชิงประจักษ์ของปลา" (PDF) . Ethology . 116 (11): 1– 14. Bibcode : 2010Ethol.116.1099H . doi : 10.1111/j.1439-0310.2010.01818.x .
- Hoare, DJ; Krause, J (2003). "การจัดระเบียบทางสังคม โครงสร้างฝูงปลา และการถ่ายทอดข้อมูล" ปลาและการประมง 4 ( 3): 269– 279. Bibcode : 2003FiFi....4..269H . doi : 10.1046/j.1467-2979.2003.00130.x .
- Inada Y (2001) "กลไกการควบคุมทิศทางของฝูงปลา" Complexity International , Vol 8, Paper ID Download
- Inagaki, T; Sakamoto, W; Aoki, I (1976). "การศึกษาพฤติกรรมการรวมฝูงของปลา—III ความสัมพันธ์ระหว่างความเร็วและรูปแบบในพฤติกรรมการรวมฝูง"วารสารสมาคมวิทยาศาสตร์การประมงแห่งญี่ปุ่น 42 ( 6): 629– 635. doi : 10.2331/suisan.42.629 .
- Kato N และ Ayers J (2004) กลไกทางชีวภาพของการว่ายน้ำและการบิน Springer. ISBN 978-4-431-22211-8
- Kennedy J, Eberhart, RC และ Shi Y (2001) Swarm Intelligence Morgan Kaufmann. ISBN 978-1-55860-595-4
- Krause, J (2005) การใช้ชีวิตในกลุ่มสำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด ISBN 978-0-19-850818-2
- Krause, J (2005). "พฤติกรรมการวางตำแหน่งในฝูงปลา: การวิเคราะห์ต้นทุนและผลประโยชน์"วารสารชีววิทยาปลา 43 : 309– 314. doi : 10.1111 /j.1095-8649.1993.tb01194.x .
{{cite journal}}: CS1 maint: บริการเก็บถาวรที่เลิกใช้แล้ว ( ลิงก์ ) - Krause, J; Ruxton, GD; Rubenstein, D (2005). "ขนาดฝูงปลามีผลต่อความสำเร็จในการล่าเหยื่อของสัตว์ผู้ล่าเสมอหรือไม่?"วารสารชีววิทยาปลา 52 ( 3): 494– 501. doi : 10.1111/j.1095-8649.1998.tb02012.x .
- Litvak, MK (1993). "การตอบสนองของปลาฝูงต่อภัยคุกคามจากการล่าเหยื่อทางอากาศ" ชีววิทยาสิ่งแวดล้อมของปลา 36 ( 2): 183– 192. Bibcode : 1993EnvBF..36..183L . doi : 10.1007/BF00002798 . S2CID 30214279 .
- Lurton X (2003) อะคูสติกใต้น้ำ Springer. ISBN 978-3-540-42967-8
- Moyle PB และ Van Dyck CM (1995) ปลา: คู่มือสำหรับผู้ชื่นชอบสำนักพิมพ์มหาวิทยาลัยแคลิฟอร์เนียISBN 978-0-520-20165-1
- Parrish JKและ Hamner WM (1997) กลุ่มสัตว์ในสามมิติ: การรวมกลุ่มของสายพันธุ์ต่างๆสำนักพิมพ์มหาวิทยาลัยเคมบริดจ์ISBN 978-0-521-46024-8
- Parrish, JK ; Viscido, SV; Grunbaumb, D (2002). "ฝูงปลาที่จัดระเบียบตนเอง: การตรวจสอบคุณสมบัติที่เกิดขึ้นใหม่" (PDF) . Biol. Bull . 202 (3): 296– 305. CiteSeerX 10.1.1.116.1548 . doi : 10.2307/1543482 . JSTOR 1543482 . PMID 12087003 . S2CID 377484 .
- Partridge, BL (1982). "โครงสร้างและหน้าที่ของฝูงปลา" (PDF) . Scientific American . Vol. 246, no. 6. pp. 114– 123. Bibcode : 1982SciAm.246f.114P . doi : 10.1038/scientificamerican0682-114 . PMID 7201674 . เก็บถาวรจากต้นฉบับ(PDF)เมื่อวันที่ 3 กรกฎาคม 2011.
- Pitcher, TJ (1983). "คำจำกัดความเชิงฮิวริสติกของพฤติกรรมการรวมฝูงของปลา" พฤติกรรมสัตว์31 (2): 611– 613. Bibcode : 1983AnBeh..31..611P . doi : 10.1016/s0003-3472(83)80087-6 . S2CID 53195091 .
- Pitcher TJ และ Parish JK (1993) "หน้าที่ของพฤติกรรมการรวมฝูงในปลาเทเลออส"ใน: Pitcher TJ (บรรณาธิการ) พฤติกรรมของปลาเทเลออส Chapman and Hall, นิวยอร์ก, หน้า 363–440
- Pitcher, TJ ; Magurran, AE; Winfield, IJ (1982). "ปลาในฝูงขนาดใหญ่หาอาหารได้เร็วกว่า". พฤติกรรมนิเวศวิทยาและสังคมชีววิทยา 10 ( 2): 149– 151. Bibcode : 1982BEcoS..10..149P . doi : 10.1007/BF00300175 . S2CID 6340986 .
- Pitcher TJ (2010) "การรวมฝูงของปลา"ใน: Steele JH, Thorpe SA และ Turekian KK (บรรณาธิการ) ชีววิทยาทางทะเล, Academic Press, หน้า 337–349. ISBN 978-0-08-096480-5.
- Pryor K และ Norris KS (1998) สังคมโลมา: การค้นพบและปริศนาสำนักพิมพ์มหาวิทยาลัยแคลิฟอร์เนียISBN 0-520-21656-3, ISBN 978-0-520-21656-3
- Ross DA (2000) The Fisherman's Ocean Stackpole Books. ISBN 978-0-8117-2771-6
- Scalabrin, C; Massé, J (1993). "Acoustic detection of the spatial and temporal distribution of fish shoals in the Bay of Biscay". Aquatic Living Resources. 6 (3): 269–283. Bibcode:1993AqLR....6..269S. doi:10.1051/alr:1993027.
- Seno, H; Nakai, K (1995). "Mathematical analysis on fish shoaling by a density-dependent diffusion model". Ecological Modelling. 79 (3): 149–157. Bibcode:1995EcMod..79..149S. doi:10.1016/0304-3800(93)E0143-Q.
- Simmonds EJ and MacLennan, DN (2005) Fisheries Acoustics Blackwell Publishing. ISBN 978-0-632-05994-2
- Suppi R, Fernandez D and Luque E (2003) Fish schools: PDES simulation and real-time 3D animation in Parallel Processing and Applied Mathematics: 5th International Conference, PPAM 2003, Springer. ISBN 978-3-540-21946-0
- Vicsek, A; Zafeiris, A (2012). "Collective motion". Physics Reports. 517 (3–4): 71–140. arXiv:1010.5017. Bibcode:2012PhR...517...71V. doi:10.1016/j.physrep.2012.03.004. S2CID 119109873.
- White TI (2007) In Defense of Dolphins Blackwell Publishing. ISBN 978-1-4051-5779-7
- Wolf, NG (1985). "Odd fish abandon mixed-species groups when threatened". Behavioral Ecology and Sociobiology. 17 (1): 47–52. Bibcode:1985BEcoS..17...47W. doi:10.1007/bf00299428. S2CID 11935938.
- Wootton, RJ (1998) Ecology of Teleost Fishes Springer. ISBN 978-0-412-64200-5
External links
- Collective Animal Behavior website organized around David Sumpter's book (2008) by the same name
- STARFLAG project: Description of starling flocking project
- Center for Biologically Inspired Design at Georgia Tech
- David Sumpter's research website
- Iain Couzin's research website
- Website of Julia Parrish, an animal aggregation researcher
- Pelagic Fisheries Research Program (2002) Current status and new directions for studying schooling and aggregation behavior of pelagic fish
- Clover, Charles (2008) Fish can count to four – but no higher Telegraph Media Group.
- Herring Migratory Behaviour
- Example of schooling simulation
- Bhaduri, Aparna (2010) Schooling in FishOpenStax College. Updated 16 July 2010.
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ การรวมกลุ่มและการเล่นเป็นฝูง
ในทางชีววิทยา กลุ่ม ปลา ใดๆ ที่อยู่รวมกันด้วยเหตุผลทางสังคมเรียกว่า ฝูงปลา และหากกลุ่มนั้นว่ายน้ำไปในทิศทางเดียวกันอย่างเป็นระบบเรียกว่าการ รวม กลุ่มเป็นฝูง [ 1 ]...
ภาพรวม
การ รวมตัว ของปลาเป็นคำทั่วไปที่ใช้เรียกกลุ่มปลาใดๆ ก็ตามที่รวมตัวกันอยู่ในบริเวณใดบริเวณหนึ่ง การรวมตัวของปลาอาจมีโครงสร้างหรือไม่ก็ได้ การรวมตัวที่ไม่มีโครงสร้างอาจเป็นกลุ่มปลาหลายชนิดและหลายขนาดที่รวมตัวกันแบบสุ่มใกล้กับแหล่งทรัพยากรในท้องถิ่น เช่น...
ปฏิสัมพันธ์ทางสังคม
การสนับสนุนหน้าที่ทางสังคมและพันธุกรรมของการรวมกลุ่ม โดยเฉพาะอย่างยิ่งการรวมกลุ่มของปลา สามารถมองเห็นได้จากพฤติกรรมหลายด้าน ตัวอย่างเช่น การทดลองแสดงให้เห็นว่าปลาแต่ละตัวที่ถูกแยกออกจากฝูงจะมีอัตราการหายใจสูงกว่าปลาที่อยู่ในฝูง [ 17 ]...
ข้อได้เปรียบในการหาอาหาร
นอกจากนี้ ยังมีการเสนอว่าการว่ายน้ำเป็นกลุ่มช่วยเพิ่มความสำเร็จในการหาอาหาร ความสามารถนี้ได้รับการพิสูจน์โดย Pitcher และคณะในการศึกษาพฤติกรรมการหาอาหารของ ปลาคาร์พ ที่อยู่รวมกัน เป็น ฝูง [ 19 ] ในการศึกษานี้ ได้มีการวัดเวลาที่กลุ่ม ปลาเล็ก...