อ่าน 23 นาที
ระบบพิกัดทรงกลม
ในทางคณิตศาสตร์ระบบพิกัดทรงกลมระบุจุดที่กำหนดในปริภูมิสามมิติโดยใช้ระยะทางและมุมสองมุมเป็นพิกัด ทั้งสาม ได้แก่ ระยะทาง มุม และ มุม
ระบบพิกัดทรงกลม

ในทางคณิตศาสตร์ระบบพิกัดทรงกลมระบุจุดที่กำหนดในปริภูมิสามมิติโดยใช้ระยะทางและมุมสองมุมเป็นพิกัด ทั้งสาม ได้แก่ ระยะทาง มุม และ มุม
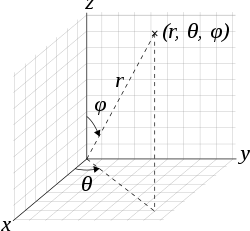
- ระยะทางรัศมีrตามแนวเส้นตรงที่เชื่อมจุดหนึ่งกับจุดคงที่ที่เรียกว่าจุดกำเนิด ;
- มุมเชิงขั้วθระหว่างเส้นรัศมีนี้กับแกนเชิงขั้ว ที่กำหนด ; [ a ] และ
- มุมอะซิมุทัลφซึ่งเป็นมุมการหมุนของเส้นรัศมีรอบแกนขั้วโลก[ b ]
(ดูภาพประกอบเกี่ยวกับ "อนุสัญญาทางฟิสิกส์")
เมื่อกำหนดรัศมีแล้ว พิกัดทั้งสาม ( r , θ , φ ) ซึ่งเรียกว่า 3- tupleจะให้ระบบพิกัดบนทรงกลมซึ่งโดยทั่วไปเรียกว่าพิกัดเชิงขั้วทรงกลมระนาบที่ผ่านจุดกำเนิดและตั้งฉากกับแกนเชิงขั้ว (โดยที่มุมเชิงขั้วเป็นมุมฉาก ) เรียกว่าระนาบอ้างอิง (บางครั้ง เรียกว่า ระนาบพื้นฐาน )
ศัพท์เฉพาะ
ระยะทางรัศมีจากจุดกำเนิดคงที่เรียกว่ารัศมีหรือเส้นรัศมีหรือพิกัดรัศมี มุมเชิงขั้วอาจเรียกว่ามุมเอียงมุมสูงสุด มุมปกติหรือมุมละติจูดร่วมผู้ใช้สามารถเลือกที่จะแทนที่มุมเอียงด้วยมุมตรงข้าม คือมุมเงย (หรือมุมระดับความสูง ) ซึ่งวัดขึ้นไปจากระนาบอ้างอิงไปยังเส้นรัศมี กล่าวคือ จากระนาบอ้างอิงขึ้นไป (ไปทางแกน z บวก) ไปยังเส้นรัศมี มุมกดลงคือค่าลบของมุมเงย(ดูภาพประกอบเกี่ยวกับ "ข้อตกลงทางฟิสิกส์" ไม่ใช่ "ข้อตกลงทางคณิตศาสตร์")
การใช้สัญลักษณ์และลำดับการตั้งชื่อพิกัดทูเพิลนั้นแตกต่างกันไปตามแหล่งข้อมูลและสาขาวิชาต่างๆ บทความนี้จะใช้แบบแผน ISO [ 1 ]ที่พบได้บ่อยในวิชาฟิสิกส์โดยที่ทูเพิลการตั้งชื่อจะกำหนดลำดับดังนี้: ระยะทางรัศมี มุมเชิงขั้ว มุมอะซิมุท หรือ(ดูภาพประกอบเกี่ยวกับ "แบบแผนทางฟิสิกส์") ในทางตรงกันข้าม แบบแผนในหนังสือและตำราคณิตศาสตร์หลายเล่มจะกำหนดลำดับการตั้งชื่อที่แตกต่างกันออกไป เช่น ระยะทางรัศมี "มุมอะซิมุท" "มุมเชิงขั้ว" และหรือ—ซึ่งสลับการใช้งานและความหมายของสัญลักษณ์ θ และ φ อาจมีการใช้แบบแผนอื่นๆ ด้วย เช่นrสำหรับรัศมีจาก แกน zที่ไม่ได้มาจากจุดกำเนิด ต้องใช้ความระมัดระวังเป็นพิเศษในการตรวจสอบความหมายของสัญลักษณ์


ตามหลักการของระบบพิกัดทางภูมิศาสตร์ตำแหน่งจะวัดโดยใช้ละติจูด ลองจิจูด และความสูง (ระดับความสูง) มีระบบพิกัดท้องฟ้า หลายระบบ ที่ใช้ระนาบพื้นฐาน ต่างกัน และมีคำศัพท์ที่แตกต่างกันสำหรับพิกัดต่างๆ ระบบพิกัดทรงกลมที่ใช้ในคณิตศาสตร์โดยปกติจะใช้เรเดียนแทนองศา (หมายเหตุ 90 องศาเท่ากับπ / 2เรเดียน) และระบบเหล่านี้ตาม หลักการทางคณิตศาสตร์อาจวัดมุมอะซิมุททวนเข็ม นาฬิกา (เช่น จากทิศใต้ตาม แกน xหรือ 180° ไปทางทิศตะวันออกตาม แกน yหรือ +90°) แทนที่จะวัดตามเข็มนาฬิกา (เช่น จากทิศเหนือตามแกน x หรือ 0° ไปทางทิศตะวันออกตามแกน y หรือ +90°) เหมือนในระบบพิกัดแนวนอน [ 2 ] (ดูภาพประกอบเกี่ยวกับ "หลักการ ทางคณิตศาสตร์")
ระบบพิกัดทรงกลมตามแบบแผนทางฟิสิกส์สามารถมองได้ว่าเป็นการขยายความของระบบพิกัดเชิงขั้วในปริภูมิสามมิติและ สามารถขยายต่อไปยังปริภูมิที่มีมิติสูงกว่าได้ โดยจะเรียกว่าระบบพิกัดไฮเปอร์ทรงกลม
คำนิยาม
ในการกำหนดระบบพิกัดทรงกลม จำเป็นต้องกำหนด จุด กำเนิดในอวกาศOและทิศทางตั้งฉากสองทิศทาง ได้แก่ ทิศทางอ้างอิง จุด สูงสุด (zenith reference direction) และ ทิศทาง อ้างอิงมุมราบ (azimuth reference direction) การเลือกเหล่านี้จะกำหนดระนาบอ้างอิง ซึ่งโดยทั่วไปจะกำหนดให้ประกอบด้วยจุดกำเนิดและแกน x และแกน yโดยที่แกนใดแกนหนึ่งอาจกำหนดให้เป็น ทิศทาง อ้างอิงมุมราบได้ระนาบอ้างอิงจะตั้งฉาก (orthogonal) กับทิศทางจุดสูงสุด และโดยทั่วไปจะกำหนดให้เป็น "แนวนอน" เมื่อเทียบกับ "แนวตั้ง" ของทิศทางจุดสูงสุด พิกัดทรงกลมของจุดPจึงถูกกำหนดดังนี้:
- รัศมีหรือระยะทางเชิงรัศมีคือระยะทางแบบยุคลิดจากจุดกำเนิดOไปยังจุดP
- มุมเอียง (หรือมุมเชิงขั้ว ) คือมุมที่มีเครื่องหมายจากทิศทางอ้างอิงจุดสูงสุดไปยังส่วนของเส้นตรงOP ( อาจใช้มุมเงย เป็นมุมเชิงขั้วแทน มุมเอียง ได้ โปรดดูรายละเอียดด้านล่าง)
- มุมอะซิมุธ (หรือมุมอะซิมุธัล ) คือมุมที่มีเครื่องหมายซึ่งวัดจาก ทิศทาง อ้างอิงอะซิมุธไปยังการฉายภาพตั้งฉากของส่วนของเส้นตรงรัศมีOPบนระนาบอ้างอิง
เครื่องหมายของมุมอะซิมุธถูกกำหนดโดยการระบุทิศทางการหมุน ซึ่งเป็น ทิศทาง บวกของการหมุนรอบจุดสูงสุด การเลือกนี้เป็นไปโดยพลการ และเป็นส่วนหนึ่งของคำจำกัดความของระบบพิกัด (ถ้าความเอียงเป็นศูนย์หรือ 180 องศา (= πเรเดียน) มุมอะซิมุธจะเป็นไปโดยพลการ ถ้าหากรัศมีเป็นศูนย์ ทั้งมุมอะซิมุธและความเอียงจะเป็นไปโดยพลการ)
มุมเงย คือ มุมที่มีเครื่องหมายจากระนาบอ้างอิง xy ไปยังส่วนของเส้นตรงรัศมีOPโดยมุมบวกหมายถึงมุมขึ้นไปยังจุดอ้างอิงสูงสุดมุมเงยคือ 90 องศา (= π/2เรเดียน) ลบด้วยความเอียงดังนั้น ถ้าความเอียงคือ 60 องศา (= π/3ถ้าเป็น เรเดียนมุมเงยจะเป็น 30 องศา (= π/6(เรเดียน)
ในพีชคณิตเชิงเส้นเวกเตอร์จากจุดกำเนิดOไปยังจุดPมักเรียกว่า เวก เตอร์ ตำแหน่งของP
อนุสัญญา
มีข้อกำหนดที่แตกต่างกันหลายแบบสำหรับการแสดงพิกัดทรงกลมและการกำหนดลำดับการตั้งชื่อสัญลักษณ์ ชุดตัวเลข 3 ตัวแสดงถึงระยะทางรัศมี มุมเชิงขั้ว—"มุมเอียง" หรืออีกนัยหนึ่งคือ "มุมเงย"—และมุมอะซิมุท นี่เป็นวิธีปฏิบัติทั่วไปในข้อกำหนดทางฟิสิกส์ ตามที่ระบุไว้ในมาตรฐานISO 80000-2:2019และก่อนหน้านี้ในISO 31-11 (1992)
ตามที่กล่าวไว้ข้างต้น บทความนี้อธิบายถึง "ข้อกำหนดทางฟิสิกส์" ของ ISO เว้นแต่จะระบุไว้เป็นอย่างอื่น
อย่างไรก็ตาม ผู้เขียนบางคน (รวมถึงนักคณิตศาสตร์) ใช้สัญลักษณ์ρ (โร) แทนรัศมี หรือระยะทางเชิงรัศมีφแทนความเอียง (หรือระดับความสูง) และθแทนมุมอะซิมุธ ในขณะที่คนอื่นๆ ยังคงใช้rแทนรัศมี ซึ่งทั้งหมดนี้ "เป็นการขยายเชิงตรรกะของสัญลักษณ์พิกัดเชิงขั้วแบบปกติ" [ 3 ]สำหรับลำดับ ผู้เขียนบางคนระบุมุมอะซิมุธก่อนมุมเอียง (หรือมุมระดับความสูง) การรวมกันของตัวเลือกเหล่านี้บางอย่างส่งผลให้เกิด ระบบพิกัด มือซ้ายชุด 3-tuple "ตามแบบแผนทางฟิสิกส์" มาตรฐาน ขัดแย้งกับสัญลักษณ์ปกติสำหรับ พิกัดเชิงขั้วสองมิติ และ พิกัดทรงกระบอกสามมิติซึ่งมักใช้θ แทนมุมอะซิมุธ [ 3 ]
โดยทั่วไปมุมจะวัดเป็นองศา (°) หรือเรเดียน (rad) โดยที่ 360° = 2 π rad การใช้องศาเป็นเรื่องปกติในทางภูมิศาสตร์ ดาราศาสตร์ และวิศวกรรม ในขณะที่เรเดียนมักใช้ในคณิตศาสตร์และฟิสิกส์เชิงทฤษฎีหน่วยของระยะทางรัศมีมักถูกกำหนดโดยบริบท เช่นเดียวกับการประยุกต์ใช้ "ทรงกลมหน่วย" ดูที่หัวข้อการประยุกต์ใช้
เมื่อใช้ระบบนี้ในการกำหนดพื้นที่สามมิติทางกายภาพ มักจะกำหนดให้มุมอะซิมุธเป็นค่าบวก โดยวัดใน ทิศทาง ทวน เข็มนาฬิกา จากทิศทางอ้างอิงบนระนาบอ้างอิง—เมื่อมองจากด้าน "จุดสูงสุด" ของระนาบ ธรรมเนียมนี้ใช้โดยเฉพาะอย่างยิ่งสำหรับพิกัดทางภูมิศาสตร์ ซึ่งทิศทาง "จุดสูงสุด" คือทิศเหนือและมุมอะซิมุธ (ลองจิจูด) ที่เป็นบวกจะวัดไปทางทิศตะวันออกจากเส้นเมริเดียนหลัก บาง เส้น
| ลำดับชุดพิกัด | ทิศทางทางภูมิศาสตร์ท้องถิ่นที่สอดคล้องกัน ( Z , X , Y ) | ถนัดขวา/ถนัดซ้าย |
|---|---|---|
| ( r , θ inc , φ az,right ) | ( ใช้ ) | ขวา |
| ( r , φ az,right , θ el ) | ( U , E , N ) | ขวา |
| ( r , θ el , φ az,right ) | ( U , N , E ) | ซ้าย |
หมายเหตุ: ทิศตะวันออก ( E ), ทิศเหนือ ( N ) , ทิศขึ้น ( U ) ในกรณีของ( U , S , E ) มุม อะซิมุธท้องถิ่นจะวัดทวนเข็ม นาฬิกา จากทิศใต้ไปยังทิศตะวันออก
พิกัดที่ไม่ซ้ำกัน
ชุดพิกัดทรงกลมสามตัว (หรือสองตัว) ใดๆระบุจุดเดียวในปริภูมิสามมิติ ในทางกลับกัน จุดเดียวใดๆ ก็มีพิกัดทรงกลมที่เทียบเท่ากันได้เป็นอนันต์ นั่นคือ ผู้ใช้สามารถเพิ่มหรือลบจำนวนรอบเต็มใดๆ ก็ได้ให้กับค่าเชิงมุมโดยไม่เปลี่ยนแปลงมุมเหล่านั้น และด้วยเหตุนี้จึงไม่เปลี่ยนแปลงจุด ในหลายบริบท การใช้ระยะทางรัศมีติดลบเป็นเรื่องสะดวก โดยมีธรรมเนียมว่าซึ่งเทียบเท่ากับหรือสำหรับr , θและφ ใดๆ ยิ่งไปกว่านั้นยังเทียบเท่ากับด้วย





เมื่อจำเป็นต้องกำหนดชุดพิกัดทรงกลมที่ไม่ซ้ำกันสำหรับแต่ละจุด ผู้ใช้ต้องจำกัดช่วง หรือช่วงห่างของแต่ละพิกัด ตัวเลือกที่นิยมใช้คือ:
- ระยะห่างเชิงรัศมี: r ≥ 0
- มุมเชิงขั้ว: 0° ≤ θ ≤ 180°หรือ0 rad ≤ θ ≤ π rad
- ราบ : 0 ° ≤ φ < 360°หรือ0 rad ≤ φ < 2 π rad
แต่แทนที่จะใช้ช่วง[0°, 360°)ค่ามุมอะซิมุธφมักจะถูกจำกัดไว้ที่ช่วงครึ่งเปิด(−180°, +180°]หรือ(−π , + π ]เรเดียน ซึ่งเป็นแบบแผนมาตรฐานสำหรับลองจิจูดทางภูมิศาสตร์
สำหรับมุมเชิงขั้วθช่วง (ระยะ) ของความเอียงคือ[0°, 180°]ซึ่งเทียบเท่ากับช่วง (ระยะ) ของระดับความสูง[−90°, +90°]ในทางภูมิศาสตร์ ละติจูดก็คือระดับความสูงนั่นเอง
ถึงแม้จะมีข้อจำกัดเหล่านี้แล้วก็ตาม หากมุมเชิงขั้ว (ความเอียง) เป็น 0° หรือ 180°—มุมเงยเป็น −90° หรือ +90°—มุมอะซิมุธก็จะเป็นค่าใดๆ ก็ได้ และหากrเป็นศูนย์ ทั้งมุมอะซิมุธและมุมเชิงขั้วก็จะเป็นค่าใดๆ ก็ได้ ในการกำหนดพิกัดให้เป็นค่าที่ไม่ซ้ำกัน ผู้ใช้สามารถกำหนดข้อตกลงว่า (ในกรณีเหล่านี้) พิกัดที่เป็นค่าใดๆ ก็ได้จะถูกตั้งค่าเป็นศูนย์
การวางแผน
ในการพล็อตจุดใดๆ จากพิกัดทรงกลม( r , θ , φ )โดยที่θคือมุมเอียง ผู้ใช้จะต้อง: เคลื่อนที่rหน่วยจากจุดกำเนิดในทิศทางอ้างอิงจุดสูงสุด (แกน z); จากนั้นหมุนด้วยมุมอะซิมุธ ( φ ) รอบจุดกำเนิด จาก ทิศทาง อ้างอิงอะซิมุธที่กำหนด(เช่น แกน x หรือแกน y ดูคำจำกัดความด้านบน); และจากนั้นหมุนจากแกน z ด้วยมุม θ
แอปพลิเคชัน

เช่นเดียวกับ ระบบพิกัดคาร์ทีเซียนสองมิติที่มีประโยชน์—และมีการใช้งานที่หลากหลาย—บนพื้นผิวระนาบ ระบบพิกัดทรงกลมสองมิติก็มีประโยชน์บนพื้นผิวของทรงกลมเช่นกัน ตัวอย่างเช่น ทรงกลมหนึ่งที่อธิบายในพิกัดคาร์ทีเซียนด้วยสมการ x² + y² + z² = c² สามารถอธิบาย ในพิกัดทรงกลมได้ด้วยสมการง่ายๆr = c (ในระบบนี้— ที่แสดงไว้ที่นี่ตามแบบแผนทางคณิตศาสตร์ —ทรงกลมถูกปรับให้เป็นทรงกลมหน่วยโดยที่รัศมีถูกกำหนดให้เป็นหนึ่งและโดยทั่วไปสามารถละเลยได้ ดูภาพประกอบ)
การลดรูป (ทรงกลมหน่วย) นี้ยังมีประโยชน์เมื่อต้องจัดการกับวัตถุต่างๆ เช่นเมทริกซ์การหมุนพิกัดทรงกลมยังมีประโยชน์ในการวิเคราะห์ระบบที่มีสมมาตรบางส่วนรอบจุดหนึ่ง รวมถึง: ปริมาตรอินทิกรัลภายในทรงกลม; สนามพลังงานศักย์ที่ล้อมรอบมวลหรือประจุที่มีความเข้มข้น; หรือการจำลองสภาพอากาศทั่วโลกในชั้นบรรยากาศของดาวเคราะห์

การสร้างแบบจำลองสามมิติของ รูปแบบการกระจายเสียง ของลำโพงสามารถใช้ในการทำนายประสิทธิภาพของลำโพงได้ จำเป็นต้องมีการสร้างกราฟแสดงการกระจายเสียงหลายจุดในช่วงความถี่ที่หลากหลาย เนื่องจากรูปแบบการกระจายเสียงเปลี่ยนแปลงไปอย่างมากตามความถี่ กราฟแสดงการกระจายเสียงช่วยแสดงให้เห็นว่าลำโพงหลายตัวมีแนวโน้มที่จะกระจายเสียงรอบทิศทางในช่วงความถี่ต่ำ
การ ประยุกต์ใช้พิกัดทรงกลมที่สำคัญอย่างหนึ่งคือการแยกตัวแปรในสมการเชิงอนุพันธ์ย่อยสองสมการได้แก่สมการลาปลาสและสมการเฮล์มโฮลทซ์ซึ่งเกิดขึ้นในปัญหาทางฟิสิกส์หลายอย่าง ส่วนเชิงมุมของคำตอบของสมการดังกล่าวจะอยู่ในรูปแบบของฮาร์มอนิกทรงกลม การประยุกต์ใช้อีกอย่างหนึ่งคือ การออกแบบตามหลักสรีรศาสตร์โดยที่rคือความยาวแขนของบุคคลที่อยู่นิ่ง และมุมต่างๆ อธิบายทิศทางของแขนขณะที่ยื่นออกไป ระบบพิกัดทรงกลมยังใช้กันทั่วไปในการพัฒนาเกม 3 มิติ เพื่อหมุนกล้องรอบตำแหน่งของผู้เล่น[ 4 ]
ในวิชาภูมิศาสตร์
แทนที่จะใช้ค่าความเอียงระบบพิกัดทางภูมิศาสตร์ใช้ค่ามุมเงย (หรือละติจูด ) ในช่วง (หรือโดเมน ) −90° ≤ φ ≤ 90°และหมุนไปทางเหนือจาก ระนาบ เส้นศูนย์สูตรละติจูด (เช่นมุมของละติจูด) อาจเป็นละติจูดแบบศูนย์กลางโลกซึ่งวัด (หมุน) จากศูนย์กลางของโลก และกำหนดด้วยสัญลักษณ์ต่างๆ เช่นψ , q , φ ′, φc , φgหรือละติจูดแบบธรณีวิทยา ซึ่งวัด (หมุน) จาก แนวตั้งท้องถิ่นของผู้สังเกตและโดยทั่วไปกำหนดด้วยφมุมขั้วโลก (ความเอียง) ซึ่งคือ 90° ลบด้วยละติจูด และมีค่าตั้งแต่ 0 ถึง 180° เรียกว่าโคลาติจูดในทางภูมิศาสตร์
มุมอะซิมุธ (หรือลองจิจูด ) ของตำแหน่งใด ๆ บนโลก ซึ่งโดยทั่วไปใช้สัญลักษณ์λนั้น วัดเป็นองศาทางทิศตะวันออกหรือทิศตะวันตกจากเส้นเมริเดียน อ้างอิงมาตรฐาน (โดยทั่วไป คือ เส้นเมริเดียนอ้างอิง IERS ) ดังนั้นช่วง (หรือขอบเขต) ของมันคือ−180° ≤ λ ≤ 180°และค่าที่วัดได้มักจะระบุว่า "ตะวันออก" หรือ "ตะวันตก" สำหรับตำแหน่งบนโลก หรือ วัตถุท้องฟ้าที่เป็นของแข็งอื่น ๆระนาบอ้างอิงมักจะถือเป็นระนาบที่ตั้งฉากกับแกน หมุน
แทนที่จะใช้ระยะทางรัศมีนักภูมิศาสตร์มักใช้ระดับความสูงเหนือหรือใต้พื้นผิวอ้างอิงท้องถิ่น ( ระดับอ้างอิงแนวตั้ง ) ซึ่งอาจเป็น ระดับน้ำทะเลเฉลี่ยตัวอย่างเช่นเมื่อจำเป็น สามารถคำนวณระยะทางรัศมีได้จากระดับความสูงโดยการบวกด้วยรัศมีของโลกซึ่งมีค่าประมาณ 6,360 ± 11 กิโลเมตร (3,952 ± 7 ไมล์)
อย่างไรก็ตาม ระบบพิกัดทางภูมิศาสตร์สมัยใหม่ค่อนข้างซับซ้อน และตำแหน่งที่ได้จากสูตรอย่างง่ายเหล่านี้อาจคลาดเคลื่อนไปหลายกิโลเมตร ความหมายมาตรฐานที่แม่นยำของละติจูด ลองจิจูดและระดับความสูงในปัจจุบันถูกกำหนดโดยระบบพิกัดทางภูมิศาสตร์โลก (WGS) ซึ่งคำนึงถึงความแบนราบของโลกบริเวณขั้วโลก (ประมาณ 21 กิโลเมตร หรือ 13 ไมล์) และรายละเอียดอื่นๆ อีกมากมาย
ระบบพิกัดดาวเคราะห์ใช้สูตรที่คล้ายคลึงกับระบบพิกัดทางภูมิศาสตร์
ในดาราศาสตร์
มีการใช้ ระบบพิกัดทางดาราศาสตร์หลายระบบเพื่อวัดมุมเงยจากระนาบพื้นฐาน หลาย ระนาบ ระนาบอ้างอิงเหล่านี้ได้แก่ขอบฟ้า ของผู้สังเกตการณ์ เส้นศูนย์สูตรกาแล็กซี (กำหนดโดยการหมุนของทางช้างเผือก ) เส้นศูนย์สูตรท้องฟ้า (กำหนดโดยการหมุนของโลก ) ระนาบสุริย วิถี (กำหนดโดยวงโคจรของโลกรอบดวงอาทิตย์ ) และระนาบเส้นแบ่ง กลางวันกลางคืนของโลก (ตั้งฉากกับทิศทางทันทีไปยังดวงอาทิตย์ )
การแปลงระบบพิกัด
เนื่องจากระบบพิกัดทรงกลมเป็นเพียงหนึ่งในระบบพิกัดสามมิติหลายระบบ จึงมีสมการสำหรับการแปลงพิกัดระหว่างระบบพิกัดทรงกลมและระบบพิกัดอื่นๆ
พิกัดคาร์ทีเซียน
พิกัดทรงกลมของจุดในระบบพิกัด ISO (เช่น ในทางฟิสิกส์: รัศมี r , มุมเอียง θ , มุมอะซิมุธ φ ) สามารถหาได้จากพิกัดคาร์ทีเซียน( x , y , z )โดยใช้สูตรต่อไปนี้
โดยที่sgn(0) = 1ค่าแทนเจนต์ผกผันแสดงด้วยφ = arctan y/xจะต้องได้รับการกำหนดอย่างเหมาะสม โดยคำนึงถึงควอดแรนต์ที่ถูกต้องของ( x , y )ดังที่ทำในสมการข้างต้น ดูบทความเกี่ยวกับ atan2

อีกทางเลือกหนึ่ง การแปลงสามารถพิจารณาได้ว่าเป็นการแปลงจากรูปสี่เหลี่ยมผืนผ้าเป็นรูปเชิงขั้ว สองครั้งต่อเนื่อง กัน ครั้งแรกในระนาบคาร์ทีเซียนxyจาก( x , y )ไปยัง( R , φ )โดยที่Rคือการฉายภาพของrลงบน ระนาบ xyและครั้งที่สองในระนาบคาร์ทีเซียนzRจาก( z , R )ไปยัง( r , θ )ควอดแรนต์ที่ถูกต้องสำหรับφและθนั้นได้มาจากความถูกต้องของการแปลงจากรูปสี่เหลี่ยมผืนผ้าในระนาบเป็นรูปเชิงขั้ว
สูตรเหล่านี้ตั้งอยู่บนสมมติฐานว่าระบบทั้งสองมีจุดกำเนิดเดียวกัน ระนาบอ้างอิงทรงกลมคือระนาบxy ในระบบพิกัดคาร์ทีเซียน θคือมุมเอียงจาก ทิศทาง zและมุมอะซิมุธวัดจาก แกน x ในระบบพิกัดคาร์ทีเซียน (ดังนั้น แกน y จึง มีφ = +90° ) หากθวัดมุมเงยจากระนาบอ้างอิงแทนที่จะเป็นมุมเอียงจากจุดสูงสุด arccos ด้านบนจะกลายเป็น arcsin และcos θและsin θด้านล่างจะสลับกัน
ในทางกลับกัน พิกัดคาร์ทีเซียนสามารถดึงกลับมาได้จากพิกัดทรงกลม ( รัศมีr , มุมเอียงθ , มุมอะซิมุธφ ) โดยที่r ∈ [0, ∞) , θ ∈ [0, π ] , φ ∈ [0, 2 π )โดย

พิกัดทรงกระบอก
พิกัดทรงกระบอก ( รัศมี แกน ρ , มุมอะซิมุธφ , มุมเงยz ) สามารถแปลงเป็นพิกัดทรงกลม ( รัศมีศูนย์กลางr , มุมเอียงθ , มุมอะซิมุธφ ) ได้โดยใช้สูตรต่อไปนี้

ในทางกลับกัน พิกัดทรงกลมสามารถแปลงเป็นพิกัดทรงกระบอกได้โดยใช้สูตร

สูตรเหล่านี้ตั้งอยู่บนสมมติฐานว่าระบบทั้งสองมีจุดกำเนิดและระนาบอ้างอิงเดียวกัน วัดมุมอะซิมุธφในทิศทางเดียวกันจากแกนเดียวกัน และมุมทรงกลมθคือมุมเอียงจากแกน ทรงกระบอก z
พิกัดทรงรี
นอกจากนี้ ยังสามารถจัดการกับทรงรีในระบบพิกัดคาร์ทีเซียนได้โดยใช้ระบบพิกัดทรงกลมแบบดัดแปลง
ให้ P เป็นทรงรีที่กำหนดโดยเซตระดับ

พิกัดทรงกลมที่ปรับเปลี่ยนแล้วของจุดใน P ตามแบบแผน ISO (เช่น ในทางฟิสิกส์: รัศมีr , มุมเอียงθ , มุม อะซิมุธφ ) สามารถหาได้จากพิกัดคาร์ทีเซียน( x , y , z )โดยใช้สูตรต่อไปนี้

องค์ประกอบปริมาตรขนาดเล็กมากกำหนดโดย

ตัวประกอบรากที่สองมาจากคุณสมบัติของดีเทอร์มิแนนต์ที่ช่วยให้สามารถดึงค่าคงที่ออกมาจากคอลัมน์ได้:

การอินทิเกรตและการหาอนุพันธ์ในพิกัดทรงกลม

สมการต่อไปนี้ (Iyanaga 1977) ถือว่าละติจูดร่วมθคือมุมเอียงจาก แกน zบวก ตามแบบแผนทางฟิสิกส์ที่ได้กล่าวถึงไปแล้ว
องค์ประกอบเส้นสำหรับการกระจัดเล็กน้อยจาก( r , θ , φ )ไปยัง( r + d r , θ + d θ , φ + d φ )คือ โดยที่ เป็น เวกเตอร์หน่วย ตั้งฉากเฉพาะที่ในทิศทางที่r , θ , และφ เพิ่มขึ้น ตามลำดับ และx̂ , ŷ , และẑเป็นเวกเตอร์หน่วยในพิกัดคาร์ทีเซียน การแปลงเชิงเส้นไปยังชุดพิกัดมือขวานี้คือเมท ริกซ์การหมุน



นี่คือการแปลงจากพิกัดคาร์ทีเซียนไปเป็นพิกัดทรงกลม ส่วนการแปลงจากพิกัดคาร์ทีเซียนไปเป็นพิกัดทรงกลมนั้นได้มาจากการใช้เมทริกซ์ผกผัน หมายเหตุ: เมทริกซ์นี้เป็นเมทริกซ์เชิงตั้งฉาก นั่นคือ เมทริก ซ์ผกผันของมันก็คือเมทริก ซ์ทรานสโพสของมันนั่นเอง
เวกเตอร์หน่วยคาร์ทีเซียนจึงมีความสัมพันธ์กับเวกเตอร์หน่วยทรงกลมดังนี้:

รูปแบบทั่วไปของสูตรเพื่อพิสูจน์องค์ประกอบเส้นเชิงอนุพันธ์คือ[ 5 ] นั่นคือ การเปลี่ยนแปลงในจะถูกแยกย่อยออกเป็นการเปลี่ยนแปลงแต่ละรายการที่สอดคล้องกับการเปลี่ยนแปลงในพิกัดแต่ละรายการ


ในการนำหลักการนี้มาใช้กับกรณีปัจจุบัน จำเป็นต้องคำนวณว่าค่าเปลี่ยนแปลงไปอย่างไรเมื่อเปลี่ยนพิกัดแต่ละค่า ตามข้อกำหนดที่ใช้

ดังนั้น,

ค่าสัมประสิทธิ์ที่ต้องการคือขนาดของเวกเตอร์เหล่านี้: [ 5 ]

องค์ประกอบพื้นผิวที่ทอดจากθไปยังθ + d θและ จาก φไปยังφ + d φบนพื้นผิวทรงกลมที่รัศมีr (คงที่) คือ

ดังนั้นมุมตัน เชิงอนุพันธ์ คือ

องค์ประกอบพื้นผิวในพื้นผิวที่มีมุมเชิงขั้วθคงที่ (กรวยที่มีจุดยอดอยู่ที่จุดกำเนิด) คือ

องค์ประกอบพื้นผิวในพื้นผิวที่มีมุมอะซิมุธφคงที่ (ระนาบครึ่งแนวตั้ง) คือ

องค์ประกอบปริมาตรที่ครอบคลุมตั้งแต่rถึงr + d r , θถึงθ + d θและφถึงφ + d φถูกกำหนดโดยดีเทอร์มิแนนต์ของเมทริกซ์จาโคเบียนของอนุพันธ์ย่อย กล่าว คือ


ดังนั้น ตัวอย่างเช่น ฟังก์ชันf ( r , θ , φ )สามารถหาปริพันธ์ได้เหนือทุกจุดในR 3โดยใช้ปริพันธ์สามชั้น

ตัว ดำเนินการ เดลในระบบนี้ นำไปสู่การแสดงออกต่อไปนี้สำหรับเกรเดียนต์และลาปลาเซียนของฟิลด์สเกลาร์ และนำไปสู่การแสดงออกต่อไปนี้สำหรับไดเวอร์เจนซ์และเคิร์ลของฟิลด์เวกเตอร์
![{\displaystyle {\begin{aligned}\nabla f&={\partial f \over \partial r}{\hat {\mathbf {r} }}+{1 \over r}{\partial f \over \partial \theta }{\hat {\boldsymbol {\theta }}}+{1 \over r\sin \theta }{\partial f \over \partial \varphi }{\hat {\boldsymbol {\varphi }}},\\[8pt]\nabla ^{2}f&={1 \over r^{2}}{\partial \over \partial r}\left(r^{2}{\partial f \over \partial r}\right)+{1 \over r^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\partial f \over \partial \theta }\right)+{1 \over r^{2}\sin ^{2}\theta }{\partial ^{2}f \over \partial \varphi ^{2}}\\[8pt]&=\left({\frac {\partial ^{2}}{\partial r^{2}}}+{\frac {2}{r}}{\frac {\partial }{\partial r}}\right)f+{1 \over r^{2}\sin \theta }{\partial \over \partial \theta }\left(\sin \theta {\frac {\partial }{\partial \theta }}\right)f+{\frac {1}{r^{2}\sin ^{2}\theta }}{\frac {\partial ^{2}}{\partial \varphi ^{2}}}f~,\\[8pt]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c085b5d702755a656ad961a224d007f50c7dfe76)

![{\displaystyle {\begin{aligned}\nabla \times \mathbf {A} ={}&{\frac {1}{r\sin \theta }}\left[{\partial \over \partial \theta }\left(A_{\varphi }\sin \theta \right)-{\partial A_{\theta } \over \partial \varphi }\right]{\hat {\mathbf {r} }}\\[4pt]&{}+{\frac {1}{r}}\left[{1 \over \sin \theta }{\partial A_{r} \over \partial \varphi }-{\partial \over \partial r}\left(rA_{\varphi }\right)\right]{\hat {\boldsymbol {\theta }}}\\[4pt]&{}+{\frac {1}{r}}\left[{\partial \over \partial r}\left(rA_{\theta }\right)-{\partial A_{r} \over \partial \theta }\right]{\hat {\boldsymbol {\varphi }}},\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c2477820afa14dd84fdaba95b49d463fba1ee65)
นอกจากนี้ เมทริกซ์ Jacobian ผกผันในระบบพิกัดคาร์ทีเซียนคือ และ เมทริกซ์เมตริกเทนเซอร์ในระบบพิกัดทรงกลมคือ


ระยะทางและมุมในพิกัดทรงกลม
ในพิกัดทรงกลม เมื่อกำหนดจุดสองจุดโดยที่φเป็นพิกัดเชิงมุม ระยะห่างระหว่างจุดทั้งสองสามารถแสดงได้ดังนี้[ 6 ]


มุมระหว่างจุดสองจุดสามารถหาได้จากผลคูณดอทในพิกัดคาร์ทีเซียน: ซึ่งตามเอกลักษณ์ความแตกต่างของมุมสำหรับโคไซน์คือ[ 7 ]



จลนศาสตร์
ในพิกัดทรงกลม ตำแหน่งของจุดหรืออนุภาค (แม้ว่าจะเขียนได้ดีกว่าในรูปสามพิกัด ) สามารถเขียนได้เป็น[ 8 ] ความเร็วของมันคือ[ 8 ] และความเร่งของมันคือ[ 8 ]


![{\displaystyle {\begin{aligned}\mathbf {a} ={}&{\frac {\mathrm {d} \mathbf {v} }{\mathrm {d} t}}\\[1ex]={}&{\hphantom {+}}\;\left({\ddot {r}}-r\,{\dot {\theta }}^{2}-r\,{\dot {\varphi }}^{2}\sin ^{2}\theta \right)\mathbf {\hat {r}} \\&{}+\left(r\,{\ddot {\theta }}+2{\dot {r}}\,{\dot {\theta }}-r\,{\dot {\varphi }}^{2}\sin \theta \cos \theta \right){\hat {\boldสัญลักษณ์ {\theta }}}\\&{}+\left(r{\ddot {\varphi }}\,\sin \theta +2{\dot {r}}\,{\dot {\varphi }}\,\sin \theta +2r\,{\dot {\theta }}\,{\dot {\varphi }}\,\cos \theta \right){\hat {\boldสัญลักษณ์ {\varphi }}}\end{ชิดกัน}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb548d3f8b0f22d189e8bca1bd0c6e4815908bb0)
โมเมนตัมเชิงมุมคือ โดยที่คือมวล ในกรณีที่φ คงที่ หรือมิฉะนั้นθ = π/2ซึ่งลดทอนลงเหลือเพียงแคลคูลัสเวกเตอร์ในพิกัดเชิงขั้ว


ตัวดำเนินการโมเมนตัมเชิงมุมที่สอดคล้องกันจึงได้มาจากการกำหนดรูปแบบใหม่ในปริภูมิเฟสของข้างต้น

แรงบิดจะกำหนดเป็น[ 8 ]

![{\displaystyle E_{k}={\frac {1}{2}}m\left[\left({\dot {r}}\right)^{2}+\left(r{\dot {\theta }}\right)^{2}+\left(r{\dot {\varphi }}\sin \theta \right)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/635f4dc13b75d1e1b4fe939530265e5408b97921)
ดูเพิ่มเติม
- ระบบพิกัดท้องฟ้า – ระบบที่ใช้ระบุตำแหน่งของวัตถุบนท้องฟ้า
- ระบบพิกัด – วิธีการระบุตำแหน่งของจุด
- Del ในระบบพิกัดทรงกระบอกและทรงกลม – ตัวดำเนินการหาอนุพันธ์เชิงคณิตศาสตร์ในระบบพิกัดบางระบบ
- วิธีการทรงกลมฟูริเยร์คู่ – เทคนิคทางคณิตศาสตร์
- ระดับความสูง (วิถีกระสุน) – มุมในวิถีกระสุน
- มุมออยเลอร์ – คำอธิบายเกี่ยวกับทิศทางของวัตถุแข็งเกร็ง
- การล็อกแกนหมุน – การสูญเสียองศาอิสระหนึ่งองศาในกลไกสามมิติแบบสามแกนหมุน
- ไฮเปอร์สเฟียร์ – วัตถุทางคณิตศาสตร์
- เมทริกซ์จาโคเบียนและดีเทอร์มิแนนต์ – เมทริกซ์ของอนุพันธ์ย่อยของฟังก์ชันเวกเตอร์
- รายการการแปลงพิกัดมาตรฐาน
- ทรงกลม – เซตของจุดที่อยู่ห่างจากจุดศูนย์กลางเท่ากัน
- ฮาร์มอนิกทรงกลม – ฟังก์ชันทางคณิตศาสตร์พิเศษที่กำหนดบนพื้นผิวของทรงกลม
- กล้องวัดมุม – เครื่องมือสำรวจทางแสง
- สนามเวกเตอร์ในระบบพิกัดทรงกระบอกและทรงกลม – การแสดงสนามเวกเตอร์ในระบบพิกัดโค้ง 3 มิติ
- การหมุนรอบแกนตั้ง แกนดิ่ง และแกนหมุนรอบแกนตามยาว – ทิศทางหลักในการบิน
หมายเหตุ
- ^เส้นที่กำหนดทิศทางดังนั้นมุมเชิงขั้วจึงเป็นมุมที่กำหนดทิศทาง โดยคำนวณจาก ทิศทางหลักของแกนขั้วไม่ใช่ทิศทางตรงข้าม
- ^หากแกนขั้วโลกตรงกับ แกน z บวก มุมอะซิมุท φสามารถคำนวณได้จากมุมระหว่าง แกน xหรือ แกน yกับการฉายภาพตั้งฉากของเส้นรัศมีลงบนระนาบ xy อ้างอิง ซึ่งตั้งฉากกับ แกน z และผ่านจุดกำเนิดคงที่ ทำให้ ระบบพิกัดคาร์ทีเซียนสามมิติสมบูรณ์
บรรณานุกรม
- อิยานางะ, โชกิจิ; คาวาดะ, ยูกิโยชิ (1977) พจนานุกรมสารานุกรมคณิตศาสตร์ . สำนักพิมพ์เอ็มไอที. ไอเอสบีเอ็น 978-0262090162.
- Morse PM , Feshbach H (1953). วิธีการทางฟิสิกส์เชิงทฤษฎี เล่ม 1.นิวยอร์ก: McGraw-Hill. หน้า 658. ISBN 0-07-043316-X. ลคซีเอ็น 52011515 .
{{cite book}}: ISBN / Date incompatibility (help) - Margenau H , Murphy GM (1956). คณิตศาสตร์ของฟิสิกส์และเคมี . นิวยอร์ก: D. van Nostrand. หน้า 177–178 . LCCN 55010911 .
- Korn GA, Korn TM (1961). คู่มือคณิตศาสตร์สำหรับนักวิทยาศาสตร์และวิศวกร . นิวยอร์ก: McGraw-Hill. หน้า 174–175 . LCCN 59014456. ASIN B0000CKZX7.
- ซาวเออร์ อาร์, Szabó I (1967) แมทเธมาติส ฮิลฟ์สมิตเทล เด อินเฌอเนียร์ นิวยอร์ก: สปริงเกอร์ แวร์แล็ก. หน้า 95–96 . LCCN 67025285 .
- Moon P, Spencer DE (1988). "พิกัดทรงกลม (r, θ, ψ)". คู่มือทฤษฎีสนาม รวมถึงระบบพิกัด สมการเชิงอนุพันธ์ และคำตอบ (ฉบับแก้ไขครั้งที่ 2 ฉบับพิมพ์ครั้งที่ 3). นิวยอร์ก: Springer-Verlag. หน้า 24–27 (ตาราง 1.05). ISBN 978-0-387-18430-2.
- Duffett-Smith P, Zwart J (2011). ดาราศาสตร์เชิงปฏิบัติด้วยเครื่องคิดเลขหรือสเปรดชีตของคุณ ฉบับที่ 4นิวยอร์ก: สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์ หน้า 34 ISBN 978-0521146548.
ลิงก์ภายนอก
- "พิกัดทรงกลม" , สารานุกรมคณิตศาสตร์ , EMS Press , 2001 [1994]
- คำอธิบายพิกัดทรงกลมจาก MathWorld
- โปรแกรมแปลงพิกัด – แปลงระหว่างพิกัดเชิงขั้ว พิกัดคาร์ทีเซียน และพิกัดทรงกลม
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ระบบพิกัดทรงกลม
ในทางคณิตศาสตร์ระบบพิกัดทรงกลมระบุจุดที่กำหนดในปริภูมิสามมิติโดยใช้ระยะทางและมุมสองมุมเป็นพิกัด ทั้งสาม ได้แก่ ระยะทาง มุม และ มุม
ศัพท์เฉพาะ
ระยะทางรัศมีจากจุดกำเนิดคงที่เรียกว่า รัศมี หรือ เส้นรัศมี หรือ พิกัดรัศมี มุม เชิงขั้วอาจเรียกว่ามุม เอียง มุมสูงสุด มุมปกติ หรือ มุม ละติจูด ร่วม ผู้ใช้สามารถเลือกที่จะแทนที่มุมเอียงด้วยมุมตรงข้าม คือ มุมเงย ( หรือมุม ระดับความสูง )...
คำนิยาม
ในการกำหนดระบบพิกัดทรงกลม จำเป็นต้องกำหนด จุด กำเนิด ในอวกาศ O และทิศทางตั้งฉากสองทิศทาง ได้แก่ ทิศทางอ้างอิง จุด สูงสุด (zenith reference direction) และ ทิศทาง อ้างอิงมุมราบ (azimuth reference direction) การเลือกเหล่านี้จะกำหนดระนาบอ้างอิง...
อนุสัญญา
มีข้อกำหนดที่แตกต่างกันหลายแบบสำหรับการแสดงพิกัดทรงกลมและการกำหนดลำดับการตั้งชื่อสัญลักษณ์ ชุดตัวเลข 3 ตัวแสดงถึงระยะทางรัศมี มุมเชิงขั้ว—"มุมเอียง" หรืออีกนัยหนึ่งคือ "มุมเงย"—และมุมอะซิมุท นี่เป็นวิธีปฏิบัติทั่วไปในข้อกำหนดทางฟิสิกส์ ตามที่ระบุไว้ในมาตรฐาน...