อ่าน 11 นาที
พวงมาลัย
การบังคับทิศทาง คือการควบคุม ทิศทาง การ เคลื่อนที่ [ 1 ] หรือส่วนประกอบที่ช่วยให้สามารถควบคุมได้ [ 2 ] การบังคับทิศทางทำได้โดยการจัดเรียงต่างๆ เช่น ปีกเล็ก สำหรับเครื่องบิน...
พวงมาลัย

การบังคับทิศทางคือการควบคุมทิศทางการเคลื่อนที่[ 1 ]หรือส่วนประกอบที่ช่วยให้สามารถควบคุมได้[ 2 ]การบังคับทิศทางทำได้โดยการจัดเรียงต่างๆ เช่นปีกเล็กสำหรับเครื่องบินหางเสือสำหรับเรือ การเอียงใบพัด เป็นวงกลม สำหรับเฮลิคอปเตอร์[ 3 ]และอื่นๆ อีกมากมาย
อากาศยาน
โดยปกติแล้ว ระบบควบคุมการบินของเครื่องบินจะถูกควบคุมทิศทางขณะอยู่บนอากาศโดยใช้ปีกเล็ก (ailerons)สปอยเลอร์ (spiolons)หรือทั้งสองอย่าง เพื่อเอียงเครื่องบินเข้าโค้ง แม้ว่าหางเสือ (rudder) จะสามารถใช้ในการเลี้ยวเครื่องบินได้เช่นกัน แต่โดยทั่วไปแล้วจะใช้เพื่อลดการเบี่ยงเบน (yaw) ที่ไม่พึงประสงค์ มากกว่าที่จะใช้เป็นวิธีการโดยตรงในการเลี้ยว บนพื้นดิน เครื่องบินโดยทั่วไปจะถูกควบคุมทิศทางที่ความเร็วต่ำโดยการหมุนล้อหน้าหรือล้อหลัง (โดยใช้คันบังคับหรือแป้นเหยียบหางเสือ) หรือโดยการเบรกที่แตกต่างกัน และโดยหางเสือที่ความเร็วสูง ขีปนาวุธ เรือเหาะ และเรือโฮเวอร์คราฟ ต์ขนาดใหญ่ มักจะถูกควบคุมทิศทางโดยหางเสือ การปรับทิศทางแรงขับ ( thrust vectoring ) หรือทั้งสองอย่าง เรือโฮเวอร์คราฟต์กีฬาขนาดเล็กมีหางเสือที่คล้ายกัน แต่ส่วนใหญ่จะควบคุมทิศทางโดยนักบินเปลี่ยนน้ำหนักตัวไปมาและลดแรงยกที่ทรงพลังกว่าใต้ท้องเรือ เจ็ตแพ็คและแพลตฟอร์มบินได้จะถูกควบคุมทิศทางโดยการปรับทิศทางแรงขับเท่านั้น
การควบคุมการบินของเฮลิคอปเตอร์นั้นควบคุมโดยการควบคุมแบบวงจร (cyclic control) ซึ่งเป็นการเปลี่ยนทิศทางแรงขับของใบพัดหลัก และโดยการควบคุมแรงบิดต้าน ซึ่งโดยปกติจะมาจากใบพัดหาง
ยานยนต์


ระบบบังคับเลี้ยว ของรถยนต์ทั่วไปช่วยให้ผู้ขับขี่ควบคุมทิศทางของรถได้โดยการหมุนล้อหน้าโดยใช้พวงมาลัยที่อยู่ด้านหน้าผู้ขับขี่ พวงมาลัยเชื่อมต่อกับคอลัมน์พวงมาลัยซึ่งเชื่อมต่อกับก้าน ข้อต่อ และเฟืองต่างๆ ที่ช่วยให้ผู้ขับขี่สามารถเปลี่ยนทิศทางของล้อหน้าได้ กลไกนี้อาจรวมถึงกลไกเฟืองและ แร็ค ที่แปลงการหมุนพวงมาลัยหลายรอบให้เป็นการเคลื่อนที่เชิงเส้นขนาดใหญ่ หรืออาจใช้ ระบบ ลูกบอลหมุนเวียน ก็ได้ กลไกนี้อาจมี การช่วยกำลัง โดยปกติแล้วจะใช้ ระบบ ไฮ ดรอลิกหรือระบบไฟฟ้า
การใช้แร็คแบบแปรผัน (ยังคงใช้เฟืองปกติ) ถูกคิดค้นโดยArthur Ernest Bishop [ 4 ]ในช่วงทศวรรษ 1970 เพื่อปรับปรุงการตอบสนองของยานพาหนะและมุ่งหวังให้การบังคับเลี้ยวสะดวกสบายยิ่งขึ้น โดยเฉพาะอย่างยิ่งที่ความเร็วสูง เขายังสร้าง กระบวนการ ขึ้นรูปด้วยการกดที่ มีต้นทุนต่ำ เพื่อผลิตแร็ค ซึ่งช่วยขจัดความจำเป็นในการกลึงฟันเฟือง
ระบบบังคับเลี้ยวแบบอื่นอาจพบได้ในยานพาหนะประเภทต่างๆ เช่นคันบังคับหรือระบบบังคับเลี้ยวล้อหลัง ยานพาหนะแบบตีนตะขาบเช่น รถดันดินและรถถัง มักใช้ระบบบังคับเลี้ยวแบบดิฟเฟอเรนเชียลซึ่งทำให้ตีนตะขาบเคลื่อนที่ด้วยความเร็วที่แตกต่างกันหรือในทิศทางตรงกันข้าม โดยใช้คลัตช์และเบรกเพื่อเปลี่ยนทิศทาง
ส่วนประกอบทั่วไปของระบบพวงมาลัย ได้แก่:
เรขาคณิต
จุดประสงค์พื้นฐานของการบังคับเลี้ยวคือการทำให้ล้อชี้ไปในทิศทางที่ต้องการเพื่อเคลื่อนที่ยานพาหนะตามที่กำหนด โดยทั่วไปแล้วจะทำได้โดยใช้กลไกเชื่อมต่อ ก้าน ข้อต่อ และเฟืองต่างๆ หนึ่งในแนวคิดพื้นฐานคือ มุมแคสเตอร์ ล้อแต่ละล้อจะถูกบังคับเลี้ยวด้วยจุดหมุนที่อยู่ด้านหน้าล้อ ซึ่งมีแนวโน้มที่จะทำให้การบังคับเลี้ยวอยู่ตรงกลางในทิศทางการเคลื่อนที่โดย อัตโนมัติ
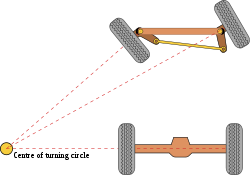
กลไกการบังคับเลี้ยวที่เชื่อมต่อระหว่างกล่องพวงมาลัยและล้อโดยทั่วไปจะใช้หลักการทางเรขาคณิตการบังคับเลี้ยวแบบ Ackermann ในรูปแบบต่างๆ เพื่อชดเชยข้อเท็จจริงที่ว่า ในขณะเลี้ยว ล้อด้านในจะเคลื่อนที่ในเส้นทางที่มีรัศมีแคบกว่าล้อด้านนอก ดังนั้นองศาของมุมโทที่เหมาะสมสำหรับการขับขี่ทางตรงจึงไม่เหมาะสมสำหรับการเลี้ยว มุมที่ล้อทำในระนาบแนวตั้ง หรือที่เรียกว่ามุมแคมเบอร์ก็มีผลต่อพลวัตการบังคับเลี้ยวเช่นเดียวกับยางรถยนต์
 มุมแคสเตอร์ θแสดงถึง เส้นแกนหมุน ของล้อและพื้นที่สีเทาแสดงถึงยางรถยนต์ โดยล้อจะเคลื่อนที่จากขวาไปซ้าย มุมแคสเตอร์ที่เป็นบวกช่วยเพิ่มเสถียรภาพในการควบคุมทิศทางเนื่องจากล้อมีแนวโน้มที่จะตามหลัง แต่หากมุมมีขนาดใหญ่เกินไปจะทำให้การบังคับเลี้ยวทำได้ยากขึ้น
มุมแคสเตอร์ θแสดงถึง เส้นแกนหมุน ของล้อและพื้นที่สีเทาแสดงถึงยางรถยนต์ โดยล้อจะเคลื่อนที่จากขวาไปซ้าย มุมแคสเตอร์ที่เป็นบวกช่วยเพิ่มเสถียรภาพในการควบคุมทิศทางเนื่องจากล้อมีแนวโน้มที่จะตามหลัง แต่หากมุมมีขนาดใหญ่เกินไปจะทำให้การบังคับเลี้ยวทำได้ยากขึ้น- เส้นโค้งที่เกิดจากล้อหลังของรถยนต์ทั่วไป ในขณะที่รถเคลื่อนที่ด้วยความเร็วคงที่ ล้อหลังด้านในและด้านนอกจะไม่เคลื่อนที่ด้วยความเร็วคงที่เช่นกัน

การหมุนพวงมาลัยมักวัดจากจำนวนรอบที่หมุนครบ 360 องศา จากซ้ายสุดไปขวาสุดซึ่งหมายถึงกลไกการป้อนกำลังของพวงมาลัยถูกจำกัดไว้ที่ขีดจำกัดทางกลไก ตั้งแต่จุดหยุดการเลี้ยวขวาสุดไปจนถึงจุดหยุดการเลี้ยวซ้ายสุด
เฟืองและแร็ค, ลูกบอลหมุนเวียน, หนอนและเซกเตอร์


รถยนต์สมัยใหม่หลายคันมีกลไกการบังคับเลี้ยวที่เรียกว่าแร็คแอนด์พิเนียนพวงมาลัยจะหมุนเฟืองพิเนียน ซึ่งจะเคลื่อนแร็คไปมาเพื่อบังคับเลี้ยวล้อ กลไกนี้แปลงการเคลื่อนที่แบบวงกลมของพวงมาลัยเป็นการเคลื่อนที่เชิงเส้นซึ่งส่งไปยังล้อของรถผ่านทางก้านผูกและ ข้อต่อ บังคับ เลี้ยว
ระบบบังคับเลี้ยวแบบแร็คแอนด์พิเนียนมีข้อดีหลายประการ เช่น ความรู้สึกในการบังคับเลี้ยวที่ตรงไปตรงมา ซึ่งหมายความว่าผู้ขับขี่สามารถรับรู้สภาพถนนได้ดีขึ้นและควบคุมการเคลื่อนที่ของรถได้อย่างแม่นยำยิ่งขึ้น
BMWเป็นหนึ่งในผู้ผลิตรายแรกๆ ที่นำระบบบังคับเลี้ยวแบบแร็คแอนด์พิเนียนมาใช้ในช่วงทศวรรษ 1930 โดยมีผู้ผลิตรถยนต์ในยุโรปรายอื่นๆ ตามมาอีกมากมาย ผู้ผลิตรถยนต์ในสหรัฐอเมริกาเริ่มใช้ระบบบังคับเลี้ยวแบบแร็คแอนด์พิเนียนกับรถFord Pintoใน ปี 1974 [ 5 ]
การออกแบบแบบเก่าใช้หลักการหลักสองอย่างคือ การออกแบบแบบหนอนและส่วนโค้ง และการออกแบบแบบสกรูและน็อต ทั้งสองแบบได้รับการปรับปรุงโดยการลดแรงเสียดทาน สำหรับแบบสกรูและน็อตนั้นใช้ กลไก บอลหมุนเวียนซึ่งยังคงพบได้ในรถบรรทุกและรถยนต์อเนกประสงค์ แกนพวงมาลัยจะหมุนสกรูขนาดใหญ่ ซึ่งจะขบกับน็อตโดยการหมุนเวียนของลูกบอล น็อตจะเคลื่อนส่วนโค้งของเฟือง ทำให้ส่วนโค้งหมุนรอบแกนของมันเมื่อสกรูหมุน แขนที่ติดอยู่กับแกนของส่วนโค้งจะเคลื่อนแขนพิทแมนซึ่งเชื่อมต่อกับระบบบังคับเลี้ยวและทำให้ล้อหมุน รุ่นบอลหมุนเวียนของอุปกรณ์นี้ช่วยลดแรงเสียดทานลงอย่างมากโดยการวางตลับลูกปืนขนาดใหญ่ไว้ระหว่างสกรูและน็อต ที่ปลายทั้งสองข้างของอุปกรณ์ ลูกบอลจะออกจากระหว่างชิ้นส่วนทั้งสองไปยังช่องภายในกล่อง ซึ่งเชื่อมต่อกับปลายอีกด้านของอุปกรณ์ ดังนั้นจึงเรียกว่า "หมุนเวียน"
กลไกบอลหมุนเวียนให้แรงส่งเชิงกลที่มากกว่า ทำให้มีการนำไปใช้ในรถยนต์ขนาดใหญ่และหนัก ในขณะที่กลไกแร็คแอนด์พิเนียนเดิมทีจะจำกัดอยู่เฉพาะรถยนต์ขนาดเล็กและเบากว่า อย่างไรก็ตาม เนื่องจากการใช้ระบบพวงมาลัยพาวเวอร์ อย่างแพร่หลาย ในปัจจุบัน จึงไม่ถือว่าเป็นข้อได้เปรียบที่สำคัญอีกต่อไป ส่งผลให้มีการใช้กลไกแร็คแอนด์พิเนียนในรถยนต์รุ่นใหม่ๆ มากขึ้น การออกแบบบอลหมุนเวียนยังมีจุดบกพร่องหรือ "จุดตาย" ที่สังเกตได้ตรงกลาง ซึ่งการหมุนพวงมาลัยเพียงเล็กน้อยในทิศทางใดก็ตามจะไม่ทำให้กลไกพวงมาลัยเคลื่อนที่ สามารถปรับได้ง่ายๆ โดยใช้สกรูที่ปลายกล่องพวงมาลัยเพื่อชดเชยการสึกหรอ แต่ไม่สามารถกำจัดได้เพราะจะทำให้เกิดแรงภายในมากเกินไปในตำแหน่งอื่นๆ และกลไกจะสึกหรออย่างรวดเร็ว การออกแบบนี้ยังคงใช้ในรถบรรทุกและรถยนต์ขนาดใหญ่อื่นๆ ซึ่งความเร็วในการบังคับเลี้ยวและความรู้สึกโดยตรงมีความสำคัญน้อยกว่าความแข็งแรง ความสามารถในการบำรุงรักษา และแรงส่งเชิงกล
ระบบเฟืองตัวหนอนและเฟืองภาคเป็นดีไซน์แบบเก่า ใช้ใน รถยนต์ยี่ห้อ Willysและ Chrysler รวมถึง Ford Falcon (ในช่วงทศวรรษ 1960) เพื่อลดแรงเสียดทาน ระบบเฟืองภาคจึงถูกแทนที่ด้วยลูกกลิ้งหรือหมุดหมุนบนแขนเพลาโยก
โดยทั่วไป รถยนต์รุ่นเก่าจะใช้ระบบบังคับเลี้ยวแบบลูกบอลหมุนเวียน ส่วนรถยนต์รุ่นใหม่จะใช้ระบบบังคับเลี้ยวแบบแร็คแอนด์พิเนียน อย่างไรก็ตาม การแบ่งแยกนี้ไม่ได้เข้มงวดมากนัก และระบบบังคับเลี้ยวแบบแร็คแอนด์พิเนียนก็ยังพบได้ในรถสปอร์ตของอังกฤษในช่วงกลางทศวรรษ 1950 และผู้ผลิตรถยนต์ชาวเยอรมันบางรายก็ยังคงใช้เทคโนโลยีลูกบอลหมุนเวียนอยู่จนถึงต้นทศวรรษ 1990
ระบบบังคับเลี้ยวแบบอื่นก็มีอยู่ แต่ไม่ค่อยพบเห็นในรถยนต์บนท้องถนน ของเล่นเด็กและรถโกคาร์ทมักใช้กลไกเชื่อมต่อ โดยตรง ในรูปแบบของก้านโยก (หรือที่รู้จักกันทั่วไปว่าแขนพิทแมน) ที่เชื่อมต่อโดยตรงระหว่างคอลัมน์พวงมาลัยและแขนบังคับเลี้ยว และการใช้กลไกบังคับเลี้ยวแบบใช้สายเคเบิล (เช่น กลไกแคปสแตนและโบว์สตริง ) ก็พบได้ในยานพาหนะที่สร้างเองบางประเภท เช่นรถแข่งสบู่และ รถ สามล้อเอนนอน
พวงมาลัยพาวเวอร์
ระบบพวงมาลัยพาวเวอร์ช่วยให้ผู้ขับขี่ควบคุมรถได้โดยการส่งกำลังจากเครื่องยนต์บางส่วนไปช่วยในการหมุนล้อรถรอบแกนบังคับเลี้ยว เนื่องจากรถยนต์มีน้ำหนักมากขึ้นและเปลี่ยนมาใช้ระบบขับเคลื่อนล้อหน้าโดยเฉพาะอย่างยิ่งการใช้เรขาคณิตแบบออฟเซ็ตลบ พร้อมกับการเพิ่มความกว้างและเส้นผ่านศูนย์กลางของยาง ทำให้แรงที่ต้องใช้ในการหมุนล้อรอบแกนบังคับเลี้ยวเพิ่มขึ้น จนบางครั้งอาจต้องออกแรงอย่างมากหากไม่มีระบบช่วยผ่อนแรง เพื่อแก้ไขปัญหานี้ ผู้ผลิตรถยนต์จึงได้พัฒนาระบบพวงมาลัยพาวเวอร์ หรือที่ถูกต้องกว่าคือระบบช่วยผ่อนแรง เนื่องจากในรถยนต์ที่วิ่งบนท้องถนนจำเป็นต้องมีกลไกเชื่อมต่อเพื่อเป็นระบบสำรองในกรณีฉุกเฉินระบบพวงมาลัยพาวเวอร์มีสองประเภท ได้แก่ ระบบไฮดรอลิกและระบบไฟฟ้า/อิเล็กทรอนิกส์ นอกจากนี้ยังสามารถใช้ระบบไฮบริดไฮดรอลิก-ไฟฟ้าได้อีกด้วย
ระบบพวงมาลัยเพาเวอร์ไฮดรอลิก (HPS) ใช้แรงดันไฮดรอลิกที่ส่งมาจากปั๊มที่ขับเคลื่อนด้วยเครื่องยนต์เพื่อช่วยในการหมุนพวงมาลัย ส่วนระบบพวงมาลัยเพาเวอร์ไฟฟ้า (EPS) มีประสิทธิภาพมากกว่าระบบพวงมาลัยเพาเวอร์ไฮดรอลิก เนื่องจากมอเตอร์ไฟฟ้าจะทำงานเฉพาะเมื่อหมุนพวงมาลัยเท่านั้น ในขณะที่ปั๊มไฮดรอลิกต้องทำงานตลอดเวลา ในระบบ EPS ปริมาณการช่วยเหลือสามารถปรับได้ง่ายตามประเภทของรถ ความเร็ว และความต้องการของผู้ขับขี่ ข้อดีเพิ่มเติมคือการกำจัดอันตรายต่อสิ่งแวดล้อมที่เกิดจากการรั่วไหลและการกำจัดของเหลวในระบบพวงมาลัยเพาเวอร์ไฮดรอลิก นอกจากนี้ การช่วยเหลือด้วยไฟฟ้าจะไม่หายไปเมื่อเครื่องยนต์ขัดข้องหรือดับ ในขณะที่การช่วยเหลือด้วยไฮดรอลิกจะหยุดทำงานหากเครื่องยนต์ดับ ทำให้พวงมาลัยหนักขึ้นเป็นสองเท่า เนื่องจากผู้ขับขี่ต้องหมุนพวงมาลัยที่หนักมากโดยปราศจากความช่วยเหลือ และยังต้องออกแรงระบบช่วยผ่อนแรงอีกด้วย
ระบบบังคับเลี้ยวที่ไวต่อความเร็ว
ระบบพวงมาลัยที่ไวต่อความเร็วช่วยให้พวงมาลัยได้รับการช่วยเหลืออย่างมากที่ความเร็วต่ำเพื่อความคล่องตัว และได้รับการช่วยเหลือเพียงเล็กน้อยที่ความเร็วสูงเพื่อความเสถียร รถยนต์คันแรกที่มีคุณสมบัตินี้คือCitroën SMที่มี ระบบ DIRAVIซึ่งวางจำหน่ายครั้งแรกในฝรั่งเศสในปี 1970 [ 6 ]ระบบพวงมาลัยไฮดรอลิกใช้แรงกับลูกเบี้ยวศูนย์กลางซึ่งดันแร็คพวงมาลัยและล้อกลับไปยังตำแหน่งตรงไปข้างหน้า แรงศูนย์กลางจะเพิ่มขึ้นตามความเร็ว ทำให้ต้องออกแรงมากขึ้นในการหมุนพวงมาลัยที่ความเร็วสูงขึ้น[ 7 ]
ระบบพวงมาลัยพาวเวอร์แบบไวต่อความเร็วสมัยใหม่จะลดการช่วยเหลือทางกลไกหรือทางไฟฟ้าเมื่อความเร็วของรถเพิ่มขึ้น ทำให้รู้สึกตรงไปตรงมามากขึ้น คุณสมบัตินี้กำลังเป็นที่นิยมมากขึ้นเรื่อยๆ ตัวอย่างเช่น ถูกนำมาใช้ในรถกระบะที่ผลิตออกจำหน่ายจริงอย่าง Tesla Cybertruck ในปี 2023 [ 8 ] [ 9 ] : 51:28
ระบบบังคับเลี้ยวสี่ล้อ

ระบบบังคับเลี้ยวสี่ล้อเป็นระบบที่ใช้ในรถยนต์บางรุ่นเพื่อปรับปรุงการตอบสนองของพวงมาลัย เพิ่มเสถียรภาพของรถขณะขับขี่ด้วยความเร็วสูง หรือลดรัศมีวงเลี้ยวที่ความเร็วต่ำ
ระบบบังคับเลี้ยวสี่ล้อแบบแอคทีฟ
ในระบบบังคับเลี้ยวสี่ล้อแบบแอคทีฟ ล้อทั้งสี่จะหมุนพร้อมกันเมื่อผู้ขับขี่บังคับเลี้ยว ในระบบบังคับเลี้ยวสี่ล้อแบบแอคทีฟส่วนใหญ่ ล้อหลังจะถูกบังคับเลี้ยวโดยคอมพิวเตอร์และแอคทูเอเตอร์[ 10 ]โดยทั่วไปแล้วล้อหลังจะไม่สามารถหมุนได้มากเท่ากับล้อหน้า อาจมีการควบคุมเพื่อปิดการบังคับเลี้ยวล้อหลังและตัวเลือกในการบังคับเลี้ยวเฉพาะล้อหลังโดยอิสระจากล้อหน้า ที่ความเร็วต่ำ (เช่น การจอดรถ) ล้อหลังจะหมุนไปในทิศทางตรงกันข้ามกับล้อหน้า ซึ่งช่วยลดรัศมีวงเลี้ยว ซึ่งบางครั้งมีความสำคัญอย่างยิ่งสำหรับรถบรรทุกขนาดใหญ่ รถแทรกเตอร์ ยานพาหนะที่มีรถพ่วง และรถยนต์นั่งส่วนบุคคลที่มีฐานล้อขนาดใหญ่ ในขณะที่ที่ความเร็วสูงขึ้นทั้งล้อหน้าและล้อหลังจะหมุนไปในทิศทางเดียวกัน (ควบคุมด้วยระบบอิเล็กทรอนิกส์) เพื่อให้รถสามารถเปลี่ยนเลนได้โดยมีการหมุน น้อยลง และมีการเร่งความเร็วในแนวด้านข้างที่ดีขึ้น ซึ่งช่วยเพิ่มเสถียรภาพในแนวตรง[ 10 ] [ 11 ]
ระบบบังคับเลี้ยวสี่ล้อใช้ในรถบรรทุกมอนสเตอร์ ส่วนใหญ่ ซึ่งความคล่องตัวในพื้นที่แคบๆ เป็นสิ่งสำคัญ และยังเป็นที่นิยมในรถยนต์และรถบรรทุกขนาดใหญ่ที่ใช้ในฟาร์ม รถโดยสารระหว่างเมืองสมัยใหม่ของยุโรปบางคันก็ใช้ระบบบังคับเลี้ยวสี่ล้อเพื่อช่วยในการควบคุมรถในสถานีขนส่ง และเพื่อปรับปรุงเสถียรภาพบนท้องถนน มาสด้าเป็นผู้บุกเบิกในการนำระบบบังคับเลี้ยวสี่ล้อมาใช้กับรถยนต์ โดยแสดงให้เห็นในรถยนต์ต้นแบบ Mazda MX-02 ในปี 1984 ซึ่งล้อหลังจะบังคับเลี้ยวในทิศทางตรงกันข้ามที่ความเร็วต่ำ[ 12 ]มาสด้าได้นำเสนอระบบบังคับเลี้ยวสี่ล้อแบบอิเล็กทรอนิกส์นี้ในMazda 626และMX6ในปี 1988 รถแรลลี่คันแรกที่ใช้เทคโนโลยีนี้คือPeugeot 405 Turbo 16ซึ่งเปิดตัวในงาน Pikes Peak International Hill Climb ปี 1988 [ 13 ]
ก่อนหน้านี้Hondaเคยมีระบบบังคับเลี้ยวสี่ล้อแบบกลไกเป็นตัวเลือกใน รุ่น Prelude ปี 1987–2001 และHonda Ascotปี 1989–1996 ต่อมาได้อัปเกรดเป็นระบบควบคุมด้วยอิเล็กทรอนิกส์ General Motors นำเสนอQuadrasteer ของ Delphi ในรุ่น Silverado/Sierra และ Suburban/Yukon เนื่องจากต้นทุนเริ่มต้นสูงในฐานะตัวเลือก และขาดความคุ้นเคยทำให้ความต้องการต่ำ GM จึงยกเลิกเทคโนโลยีนี้เมื่อสิ้นสุดปีรุ่น 2005 [ 14 ] Nissan/Infiniti นำเสนอ ระบบ HICAS หลายเวอร์ชัน เป็นมาตรฐานหรือเป็นตัวเลือกในรถยนต์หลายรุ่นของพวกเขา
ในช่วงต้นทศวรรษ 2000 ระบบบังคับเลี้ยวสี่ล้อรุ่นใหม่ได้ถูกนำเข้าสู่ตลาด ในปี 2001 BMW ได้ติดตั้งระบบบังคับเลี้ยวสี่ล้อ (เป็นอุปกรณ์เสริม เรียกว่า 'Integral Active Steering') ในรถยนต์ซีรีส์ 7 รุ่น E65 ซึ่งมีให้เลือกในซีรีส์ 5, 6 และ 7 ในปัจจุบัน [ 15 ] [ 16 ] [ 11 ]เรโนลต์ได้แนะนำระบบบังคับเลี้ยวสี่ล้อแบบเลือกได้ที่เรียกว่า '4control' [ 17 ] [ 18 ] [ 19 ]ในปี 2009 โดยเริ่มแรกในLaguna GTซึ่งปัจจุบันมีให้เลือกใน รถยนต์ Talisman [ 18 ] Mégane [ 17 ]และEspace [ 19 ]ในปี 2013 ปอร์เช่ได้แนะนำระบบนี้ใน911 Turboเป็นอุปกรณ์มาตรฐาน[ 20 ]ตั้งแต่ปี 2016 เป็นต้นมาPanameraได้นำเสนอระบบบังคับเลี้ยวสี่ล้อแบบเลือกได้[ 21 ] Audi Q7รุ่นปี 2014 เปิดตัวพร้อมระบบเสริม[ 22 ]นอกจากนี้ ผู้ผลิตรถยนต์ญี่ปุ่นยังนำเสนอรถยนต์ในกลุ่มรถหรูที่ติดตั้งระบบบังคับเลี้ยวสี่ล้อ เช่น Infiniti ในรุ่น QX70 ('Rear Active Steering') [ 23 ]และ Lexus ในรุ่น GS [ 24 ] ผู้ผลิต รถยนต์อิตาลีได้เปิดตัวเทคโนโลยีนี้ในรุ่นปี 2016–17 ด้วยFerrari F12tdf [ 25 ] Ferrari GTC4Lusso [ 26 ]รวมถึงLamborghini Aventador S [ 27 ]
 ตัวอย่างแรกๆ ของระบบบังคับเลี้ยวสี่ล้อ ภาพถ่ายปี 1910 ของ รถแทรกเตอร์ Caldwell Vale ขนาด 80 แรงม้า ขณะใช้งาน
ตัวอย่างแรกๆ ของระบบบังคับเลี้ยวสี่ล้อ ภาพถ่ายปี 1910 ของ รถแทรกเตอร์ Caldwell Vale ขนาด 80 แรงม้า ขณะใช้งาน รถยนต์เมอร์เซเดส-เบนซ์ รุ่น Type G 5 ปี 1937 พร้อมระบบบังคับเลี้ยวสี่ล้อ
รถยนต์เมอร์เซเดส-เบนซ์ รุ่น Type G 5 ปี 1937 พร้อมระบบบังคับเลี้ยวสี่ล้อ Sierra Denali พร้อม ระบบ Quadrasteerมุมบังคับเลี้ยวล้อหลัง
Sierra Denali พร้อม ระบบ Quadrasteerมุมบังคับเลี้ยวล้อหลัง
 กล่องพวงมาลัยด้านหลังของ Honda Prelude Mk III
กล่องพวงมาลัยด้านหลังของ Honda Prelude Mk III





การบังคับทิศทางปู
ระบบบังคับเลี้ยวแบบปู (Crab steering) เป็นระบบบังคับเลี้ยวสี่ล้อแบบพิเศษ โดยจะทำงานด้วยการบังคับล้อทั้งสี่ไปในทิศทางเดียวกันและทำมุมเดียวกัน ระบบบังคับเลี้ยวแบบปูใช้เมื่อรถจำเป็นต้องวิ่งตรงไปข้างหน้าแต่ทำมุม เช่น เมื่อเปลี่ยนเลนบนทางหลวงด้วยความเร็วสูง เมื่อเคลื่อนย้ายสิ่งของด้วยรถยกแบบ Reach truck หรือระหว่างการถ่ายทำภาพยนตร์ด้วยรถเข็นกล้อง (Camera dolly)
นอกจากนี้ ยังสามารถใช้การบังคับเลี้ยวล้อหลังได้ในกรณีที่ล้อหลังอาจไม่วิ่งตามรอยล้อหน้า (เช่น เพื่อลดการอัดแน่นของดินเมื่อใช้เครื่องจักรทางการเกษตรแบบมีล้อ)
 รถยกแบบยืดหดได้ Liebherr-Bauma ปี 2007 ที่ใช้ระบบบังคับเลี้ยวแบบปู (crab steering)
รถยกแบบยืดหดได้ Liebherr-Bauma ปี 2007 ที่ใช้ระบบบังคับเลี้ยวแบบปู (crab steering) รถบดถนนแบบสองเพลา Hamm DV70 ใช้ระบบบังคับเลี้ยวแบบปูเพื่อครอบคลุมพื้นผิวถนนสูงสุด (2010)
รถบดถนนแบบสองเพลา Hamm DV70 ใช้ระบบบังคับเลี้ยวแบบปูเพื่อครอบคลุมพื้นผิวถนนสูงสุด (2010) เครื่องพ่นปุ๋ยเหลวทางการเกษตรที่ใช้ระบบบังคับเลี้ยวแบบปูเพื่อลดการอัดแน่นของดิน (2009)
เครื่องพ่นปุ๋ยเหลวทางการเกษตรที่ใช้ระบบบังคับเลี้ยวแบบปูเพื่อลดการอัดแน่นของดิน (2009)



ระบบบังคับเลี้ยวล้อหลังแบบพาสซีฟ
รถยนต์สมัยใหม่หลายคันมีระบบบังคับเลี้ยวล้อหลังแบบพาสซีฟ ในรถยนต์หลายคัน เมื่อเข้าโค้ง ล้อหลังมักจะเบี่ยงออกไปทางด้านนอกเล็กน้อย ซึ่งอาจลดเสถียรภาพลงได้ ระบบบังคับเลี้ยวแบบพาสซีฟใช้แรงด้านข้างที่เกิดขึ้นในขณะเข้าโค้ง (ผ่านรูปทรงเรขาคณิตของระบบกันสะเทือน) และบูชเพื่อแก้ไขแนวโน้มนี้และบังคับล้อให้เบี่ยงเข้าด้านในเล็กน้อย ซึ่งจะช่วยเพิ่มเสถียรภาพของรถขณะเข้าโค้ง ปรากฏการณ์นี้เรียกว่า อาการอันเดอร์สเตียร์จากการตอบสนอง (compliance understeer ) ซึ่งเกิดขึ้นได้ในระบบกันสะเทือนทุกแบบ วิธีการทั่วไปในการทำให้เกิดอาการอันเดอร์สเตียร์จากการตอบสนอง คือ การใช้Watt's linkบนเพลาหลังแบบตายตัว หรือการใช้บูชควบคุมมุมล้อ (toe control bushings) บนระบบกันสะเทือนแบบทวิสต์บีมสำหรับระบบกันสะเทือนหลัง แบบอิสระ โดยปกติจะทำได้โดยการเปลี่ยนค่าความแข็งของบูชยางในระบบกันสะเทือน ระบบกันสะเทือนบางประเภทมักมีอาการท้ายปัดเนื่องจากรูปทรงทางเรขาคณิต เช่นเพลาแข็งแบบ Hotchkiss , ระบบกันสะเทือนอิสระแบบแขนลากกึ่งอัตโนมัติ และคานบิดด้านหลัง แต่อาการเหล่านี้อาจลดลงได้ด้วยการปรับเปลี่ยนจุดหมุนของแหนบหรือแขนลาก หรือการเพิ่มชิ้นส่วนเชื่อมต่อระบบกันสะเทือน หรือการออกแบบรูปทรงภายในที่ซับซ้อนของบูช
ระบบบังคับเลี้ยวล้อหลังแบบพาสซีฟไม่ใช่แนวคิดใหม่ เพราะมีการใช้งานมานานหลายปีแล้ว แม้ว่าจะไม่ได้รับการยอมรับเช่นนั้นเสมอไปก็ตาม
ระบบบังคับเลี้ยวแบบข้อต่อ

ระบบบังคับเลี้ยวแบบข้อต่อเป็นระบบที่แบ่งรถออกเป็นสองส่วน คือส่วนหน้าและส่วนหลัง ซึ่งเชื่อมต่อกันด้วยบานพับแนวตั้ง ส่วนหน้าและส่วนหลังเชื่อมต่อกันด้วยกระบอกไฮดรอลิก หนึ่งตัวหรือมากกว่านั้น ซึ่งจะเปลี่ยนมุมระหว่างส่วนต่างๆ รวมถึงเพลาหน้าและเพลาหลัง และล้อ ทำให้รถสามารถบังคับเลี้ยวได้ ระบบนี้ไม่ใช้แขนบังคับเลี้ยว สลักคิงพิน ก้านผูก ฯลฯ เหมือนกับระบบบังคับเลี้ยวสี่ล้อ หากบานพับแนวตั้งอยู่ห่างจากเพลาทั้งสองเท่ากัน ก็จะช่วยลดความจำเป็นในการใช้เฟืองท้าย กลาง ในรถขับเคลื่อนสี่ล้อ เนื่องจากเพลาหน้าและเพลาหลังจะเคลื่อนที่ไปตามเส้นทางเดียวกัน และหมุนด้วยความเร็วเท่ากันรถบรรทุกแบบข้อต่อมีสมรรถนะการขับขี่บนทางวิบากที่ดีมาก
ยานพาหนะที่ต่อพ่วงกับตัวรถ เช่น รถกึ่งพ่วงรถไฟฟ้า รางยาว รถโดยสารประจำทาง แบบต่อ พ่วงและรถไฟฟ้ารางเบาสำหรับการขนส่งภายในเมือง สามารถถือได้ว่าเป็นยานพาหนะแบบต่อพ่วงโดยทางอ้อม
ระบบบังคับเลี้ยวล้อหลัง
ยานพาหนะบางประเภทใช้การบังคับเลี้ยวล้อหลังเท่านั้น โดยเฉพาะรถยก รถดอลลี่กล้องรถตักดินรุ่นแรกรถ DymaxionของBuckminster FullerและThrustSSC [ 28 ]
ระบบบังคับเลี้ยวล้อหลังมีประโยชน์อย่างยิ่งสำหรับการบังคับเลี้ยวในพื้นที่แคบ อย่างไรก็ตาม การใช้งานระบบบังคับเลี้ยวล้อหลังที่ไม่เหมาะสมมักจะทำให้เกิดอาการโอเวอร์สเตียร์ ซึ่งอาจนำไปสู่ความไม่เสถียรในการบังคับเลี้ยว ดังนั้น ระบบบังคับเลี้ยวล้อหลังจึงมักพบในยานพาหนะที่วิ่งช้าและต้องการความคล่องตัวสูงในพื้นที่แคบ เช่น รถยก
สำหรับงานบรรทุกหนักหรือเพื่อเพิ่มความคล่องตัว รถกึ่งพ่วงบางคันจึงติดตั้งระบบบังคับเลี้ยวล้อหลัง ซึ่งควบคุมด้วยระบบไฟฟ้าไฮดรอลิก ล้อบนเพลาหลังทั้งหมดหรือบางส่วนอาจหมุนได้ในมุมที่แตกต่างกันเพื่อช่วยให้เข้าโค้งได้แคบลง หรือหมุนในมุมเดียวกัน (การบังคับเลี้ยวแบบปู) เพื่อเคลื่อนส่วนท้ายของรถพ่วงไปด้านข้าง
ระบบบังคับเลี้ยวด้วยไฟฟ้า



เป้าหมายของ เทคโนโลยี พวงมาลัยไฟฟ้าคือการกำจัดชิ้นส่วนกลไก (เพลาพวงมาลัย คอลัมน์พวงมาลัย กลไกทดเกียร์ ฯลฯ) ออกให้มากที่สุดเท่าที่จะเป็นไปได้ การเปลี่ยนระบบพวงมาลัยแบบเดิมทั้งหมดด้วยพวงมาลัยไฟฟ้ามีข้อดีหลายประการ เช่น:
- การไม่มีคอลัมน์พวงมาลัยช่วยให้การออกแบบภายในรถดูเรียบง่ายขึ้น
- การไม่มีเพลาพวงมาลัย คันบังคับ และกลไกทดเกียร์ ทำให้สามารถใช้พื้นที่ในห้องเครื่องยนต์ได้อย่างมีประสิทธิภาพมากขึ้น
- กลไกการบังคับเลี้ยวสามารถออกแบบและติดตั้งเป็นหน่วยแบบโมดูลาร์ได้
- หากไม่มีการเชื่อมต่อทางกลไกระหว่างพวงมาลัยกับล้อรถ โอกาสที่พวงมาลัยจะกระแทกคนขับในกรณีที่เกิดอุบัติเหตุชนด้านหน้าก็จะน้อยลง
- คุณลักษณะของระบบบังคับเลี้ยวสามารถปรับเปลี่ยนได้อย่างง่ายดาย เพื่อเปลี่ยนการตอบสนองและความรู้สึกในการบังคับเลี้ยว
ระบบบังคับเลี้ยวแบบอิเล็กทรอนิกส์โดยไม่ต้องใช้คอลัมน์พวงมาลัยถูกนำมาใช้ในรถยนต์ที่ผลิตจริงเป็นครั้งแรกในรุ่นNissan Infiniti Q50ในปี 2013 [ 29 ]ระบบบังคับเลี้ยวแบบอิเล็กทรอนิกส์ยังคงถูกนำมาใช้ในรุ่น QX50 และ QX55 และในปี 2022 ก็ถูกนำมาใช้ในรุ่นInfiniti Q60 coupe [ 30 ]
รถยนต์ไฟฟ้าแบตเตอรี่ที่ผลิต ในช่วงทศวรรษ 2020 ที่มี ระบบบังคับเลี้ยวแบบอิเล็กทรอนิกส์โดยไม่มีคอลัมน์พวงมาลัย ได้แก่Canoo Lifestyle Vehicle [ 31 ] Lexus RZ 450e [ 32 ]รถยนต์ที่ใช้โมดูล REE Automotive P7 [ 33 ] Toyota bZ4X [ 30 ] และ Tesla Cybertruck [ 34 ] ณปี 2023 Lotus [ 35 ] Peugeot [ 36 ]และMercedes-Benz วางแผน ที่จะนำเสนอรถยนต์ระบบ บังคับเลี้ยวแบบอิเล็กทรอนิกส์ในช่วงกลางถึงปลายทศวรรษ 2020 [ 37 ]
ความปลอดภัย
โดยทั่วไปแล้ว รถยนต์จะมีคอลัมน์พวงมาลัยแบบยุบตัวได้ (คอลัมน์พวงมาลัยดูดซับพลังงาน) ซึ่งจะยุบตัวลงในกรณีที่เกิดการชนด้านหน้าอย่างรุนแรง เพื่อป้องกันการบาดเจ็บรุนแรงต่อผู้ขับขี่ นอกจากนี้ ถุงลมนิรภัยก็มักจะติดตั้งเป็นอุปกรณ์มาตรฐานด้วย คอลัมน์พวงมาลัยแบบไม่ยุบตัวที่ติดตั้งในรถยนต์รุ่นเก่า มักจะทำให้ผู้ขับขี่ได้รับบาดเจ็บจากการชนด้านหน้า โดยเฉพาะอย่างยิ่งเมื่อกล่องพวงมาลัยหรือแร็คพวงมาลัยติดตั้งอยู่ด้านหน้าของแนวเพลาหน้า บริเวณด้านหน้าของโซนยุบตัวปัญหานี้เกิดขึ้นโดยเฉพาะในรถยนต์ที่มีโครงแชสซีแบบแยกส่วนที่แข็งแรงโดยไม่มีโซนยุบตัว กล่องพวงมาลัยหรือแร็คพวงมาลัยของรถยนต์สมัยใหม่หลายรุ่นติดตั้งอยู่ด้านหลังเพลาหน้าบนผนังกั้นด้านหน้า บริเวณด้านหลังของโซนยุบตัวด้านหน้า
คอลัมน์พวงมาลัยแบบยุบตัวได้ถูกคิดค้นโดยBéla Barényiและถูกนำมาใช้ในMercedes-Benz W111 Fintail ในปี 1959 พร้อมกับโซนยุบตัว คุณสมบัติความปลอดภัยนี้ปรากฏครั้งแรกในรถยนต์ที่ผลิตโดย General Motors หลังจากแคมเปญล็อบบี้อย่างกว้างขวางและเปิดเผยโดยRalph Naderฟอร์ดเริ่มติดตั้งคอลัมน์พวงมาลัยแบบยุบตัวได้ในปี 1968 [ 38 ]
Audi เคยใช้ระบบพวงมาลัยแบบพับเก็บได้และระบบดึงเข็มขัดนิรภัยอัตโนมัติที่เรียกว่าprocon-tenแต่ระบบดังกล่าวถูกยกเลิกไปแล้วและหันมาใช้ถุงลมนิรภัยและระบบดึงเข็มขัดนิรภัยแบบใช้แรงระเบิดแทน
วงจร
ในจักรยานและรถจักรยานยนต์การเอนตัวไปในทิศทางของการเลี้ยวเป็นสิ่งจำเป็นเพื่อต้านทานแรงเฉื่อยของยานพาหนะ ซึ่งมิฉะนั้นจะทำให้ยานพาหนะลื่นไถลไปในแนวตรง เพื่อให้ยานพาหนะสองล้อเอนตัวเข้าโค้ง ผู้ขับขี่มักจะหักพวงมาลัยไปในทิศทางตรงกันข้ามชั่วครู่เพื่อให้ล้อเอียงออกจากการเลี้ยว ซึ่งเป็นกระบวนการที่เรียกว่าการหักพวงมาลัยต้าน [ 39 ] ที่ ความเร็วต่ำ การหักพวงมาลัยต้านที่จำเป็นในการเลี้ยวนั้นแทบจะไม่สังเกตเห็นได้เลย แต่ที่ความเร็วของรถจักรยานยนต์ทั่วไป จำเป็นต้องใช้การหักพวงมาลัยต้านขนาดใหญ่และจงใจเพื่อให้เลี้ยวได้อย่างรวดเร็ว ปริมาณการหักพวงมาลัยต้านที่จำเป็นยังขึ้นอยู่กับน้ำหนักของยานพาหนะด้วย เนื่องจากจักรยานมักจะสามารถเลี้ยวได้โดยใช้เพียงการเปลี่ยนน้ำหนักเท่านั้น[ 40 ] เทคนิคที่คล้ายกันนี้ยังใช้ในการบังคับเลี้ยวรถสามล้อเอียงแต่รถสามล้อแข็งที่ไม่เอียงจะถูกบังคับเลี้ยวในลักษณะเดียวกับรถยนต์[ 41 ]และอาจต้องใช้เฟืองท้ายเพื่อให้ล้อที่หันออกจากทางเลี้ยวสามารถเคลื่อนที่ได้ระยะทางไกลกว่าล้อที่หันเข้าทางเลี้ยว
การบังคับเลี้ยวแบบดิฟเฟอเรนเชียล
การบังคับเลี้ยวแบบดิฟเฟอเรนเชียลเป็นวิธีการหลักในการบังคับเลี้ยวยานพาหนะ แบบตีนตะขาบ เช่น รถถังและรถดันดิน[ 42 ]นอกจากนี้ยังใช้ในยานพาหนะล้อเลื่อนบางประเภทที่รู้จักกันทั่วไปในชื่อskid-steerและนำไปใช้ในรถยนต์บางคัน ซึ่งเรียกว่าtorque vectoringเพื่อเพิ่มประสิทธิภาพการบังคับเลี้ยวโดยการเปลี่ยนทิศทางของล้อสัมพันธ์กับตัวรถ
ข้อบังคับ
- ในสหภาพยุโรป รัสเซีย และญี่ปุ่น ข้อบังคับเกี่ยวกับยานยนต์ข้อที่ 79 ของคณะกรรมาธิการเศรษฐกิจแห่งสหประชาชาติสำหรับยุโรป (UNECE) เกี่ยวข้องกับระบบบังคับเลี้ยว
- ในสหรัฐอเมริกามาตรฐานความปลอดภัยยานยนต์ของรัฐบาลกลางมาตรา 203 และ 204 เกี่ยวข้องกับการป้องกันการกระแทกสำหรับผู้ขับขี่จากระบบควบคุมพวงมาลัยและการเคลื่อนที่ไปด้านหลังของระบบควบคุมพวงมาลัย ในขณะที่ มาตรา 49 ประมวลกฎหมายของรัฐบาลกลาง § 393.209 เกี่ยวข้องกับระบบพวงมาลัย
- ในอเมริกาเหนือ ระบบระดับ 2 แบบ "ไม่ต้องจับพวงมาลัย" หรือ "ไม่ต้องจับพวงมาลัย" ที่อนุญาตให้ผู้ขับขี่วางมือทั้งสองข้างออกจากพวงมาลัยได้ถูกนำมาใช้และได้รับอนุญาตตามกฎหมาย ระบบ Super Cruise ของ General Motors เป็นตัวอย่างหนึ่งของการใช้งานดังกล่าว ในการออกแบบเหล่านั้น จะมีการแจ้งเตือนเมื่อผู้ขับขี่ละสายตาจากพวงมาลัย[ 43 ]
- ในเดือนพฤษภาคม พ.ศ. 2566 ในยุโรป ระเบียบข้อบังคับ UNECE ข้อ 79 ยังคงกำหนดให้ระบบช่วยบังคับเลี้ยวต้องแจ้งเตือนผู้ขับขี่ไม่ให้เอามือออกจากพวงมาลัย ระบบเหล่านี้เรียกว่าระบบ "hands-on" ด้วยระบบช่วยขับขี่แบบ "hands-on" ผู้ขับขี่ชาวอังกฤษและยุโรปจะต้องวางมือข้างใดข้างหนึ่งหรือทั้งสองข้างไว้บนพวงมาลัย เช่นเดียวกับการขับขี่โดยไม่มีระบบช่วย: เมื่อขับขี่โดยใช้ระบบช่วยบังคับเลี้ยว หากผู้ขับขี่เอามือทั้งสองข้างออกจากพวงมาลัย จะมีสัญญาณเตือนด้วยแสงเกิดขึ้นหลังจาก 15 วินาทีแรก และจะมีสัญญาณเตือนด้วยเสียงเกิดขึ้นหลังจากนั้นอีก 15 วินาที ระบบช่วยบังคับเลี้ยวจะถูกปิดใช้งานหลังจากนั้นอีก 30 วินาที[ 43 ]
- ในสหราชอาณาจักร ผู้ขับขี่ต้องควบคุมรถตลอดเวลา และกฎข้อที่ 160 ของกฎจราจรระบุว่า "ควรขับรถโดยวางมือทั้งสองข้างไว้บนพวงมาลัยเมื่อทำได้" และ "ควรใช้ (ADAS) ตามคำแนะนำของผู้ผลิต" [ 43 ]
จักรยาน
จักรยานจะถูกบังคับทิศทางโดยการหมุนแฮนด์และโดยการเอนตัวของผู้ขี่และจักรยาน: [ 44 ]
- การหมุนแฮนด์จักรยานจะหมุนล้อหน้าเทียบกับระนาบของเส้นรอบวงของล้อหลัง แรงเสียดทานระหว่างล้อหน้ากับพื้นจะสร้างแรงด้านข้างที่ช่วยในการบังคับทิศทางของจักรยาน จักรยานสมัยใหม่จะมีจุดสัมผัสพื้นของล้อหน้าอยู่เยื้องไปด้านหลังแกนบังคับเลี้ยว ซึ่งก็คือแกนยาวของตะเกียบจักรยานที่ผ่านศูนย์กลางของล้อหน้า จุดสัมผัสที่อยู่เยื้องไปด้านหลังนี้จะเพิ่มผลกระทบของแรงเฉื่อยและการเบี่ยงเบนของจุดศูนย์กลางมวล ซึ่งส่งผลต่อการบังคับเลี้ยวและความเสถียรของจักรยาน
- การเอียงเฟรมจักรยานซึ่งทำให้ผู้ขี่และส่วนต่างๆ ของจักรยานเคลื่อนที่ไปจากแกนตามจุดสัมผัสพื้นของล้อ แรงโน้มถ่วงจะสร้างแรงด้านข้างที่ช่วยบังคับทิศทางของจักรยาน
เรือ
เรือและเรือเล็กมักจะบังคับทิศทางด้วยหางเสือขึ้นอยู่กับขนาดของเรือ หางเสืออาจควบคุมด้วยมือ หรือควบคุมโดยใช้กลไกเซอร์โวหรือ ระบบ แผ่นปรับสมดุลหรือระบบเซอร์โวแท็บ การพายเรืออาจใช้ในการบังคับทิศทางเรือพายโดยใช้จังหวะการพายที่เฉพาะเจาะจงเรือที่ใช้เครื่องยนต์นอกตัวเรือจะบังคับทิศทางโดยการหมุนชุดขับเคลื่อนทั้งหมด เรือที่มีเครื่องยนต์ในตัวเรือบางครั้งบังคับทิศทางโดยการหมุน เฉพาะ ใบพัด (เช่น ระบบขับเคลื่อน Volvo Penta IPS) อาจใช้พวงมาลัยในการควบคุมหางเสือหรือใบพัด เรือสมัยใหม่ที่มีระบบขับเคลื่อนดีเซลไฟฟ้าใช้เครื่องขับดันแบบ อะซิมุ ธเรือที่ขับเคลื่อนด้วยไม้พายจะบังคับทิศทางโดยการสร้างแรงขับเคลื่อนที่สูงขึ้นที่ด้านข้างของเรือตรงข้ามกับทิศทางการเลี้ยวเจ็ทสกี บังคับทิศทางโดยการหมุนที่เกิดจากการเปลี่ยนน้ำหนักและ การ ควบคุมทิศทางแรงขับของเจ็ทน้ำ
หางเสือของเรือสามารถบังคับทิศทางเรือได้ก็ต่อเมื่อมีน้ำไหลผ่านเท่านั้น ดังนั้น เมื่อเรือไม่เคลื่อนที่สัมพันธ์กับน้ำที่มันอยู่ หรือไม่สามารถขยับหางเสือได้ เรือจะไม่ตอบสนองต่อหางเสือและกล่าวได้ว่าสูญเสียการควบคุมทิศทางการเคลื่อนที่ของเรือผ่านน้ำเรียกว่าการแล่นเรือในแม่น้ำต้องมีแรงขับเคลื่อนอยู่เสมอ แม้ว่าจะแล่นลงไปตามกระแสน้ำ เพื่อที่จะบังคับทิศทาง โดยต้องมีน้ำไหลผ่านพื้นผิวของหางเสือมากพอที่จะทำให้เกิดการเปลี่ยนแปลงทิศทางของเรือตามการบังคับหางเสือ นี่เรียกว่าการมี "การควบคุมทิศทาง" [ 45 ]
ดูเพิ่มเติม
- ระบบควบคุมการหันเหแบบแอคทีฟ (AYC)
- บัมพ์สเตียร์
- มุมแคมเบอร์
- แรงผลักแคมเบอร์
- มุมแคสเตอร์
- การควบคุมทิศทาง
- ดิราวี
- พวงมาลัยแห้ง
- ฮิกาส
- คำแนะนำ (ด้านวิศวกรรม)
- คิงพิน
- ล็อคตรงข้าม
- พวงมาลัยพาวเวอร์
- พวงมาลัยเรือ
- รถตักล้อยาง
- ระบบบังคับเลี้ยวด้วยไฟฟ้า
- โช้คอัพพวงมาลัย
- แรงสะบัดพวงมาลัย
- อัตราส่วนการบังคับเลี้ยว
- พวงมาลัย
- พวงมาลัยเรือ
- ทิลเลอร์
- พวงมาลัยแรงบิด
- รัศมีวงเลี้ยว
- พลศาสตร์ยานยนต์
ลิงก์ภายนอก
- วิธีการทำงานของพวงมาลัยรถยนต์ที่HowStuffWorks
- บทความทางเทคนิคปี 2000 ว่าด้วยการออกแบบเชิงจลศาสตร์ของระบบบังคับเลี้ยวแบบเฟืองและแร็ค
- บทความทางเทคนิคปี 2002 เกี่ยวกับการออกแบบเชิงจลศาสตร์ของกลไกบังคับเลี้ยวแบบเบลล์แคร้งค์