อ่าน 21 นาที
ความโค้ง
ในทาง คณิตศาสตร์ ความโค้ง คือแนวคิดที่เกี่ยวข้องกันอย่างมากใน เรขาคณิต ซึ่งใช้วัดปริมาณที่เส้น โค้ง เบี่ยงเบนจาก เส้นตรง หรือ พื้นผิว เบี่ยงเบนจาก ระนาบ...
ความโค้ง
ในทางคณิตศาสตร์ความโค้งคือแนวคิดที่เกี่ยวข้องกันอย่างมากในเรขาคณิตซึ่งใช้วัดปริมาณที่เส้นโค้งเบี่ยงเบนจากเส้นตรงหรือพื้นผิวเบี่ยงเบนจากระนาบหากเส้นโค้งหรือพื้นผิวอยู่ในปริภูมิที่ใหญ่กว่า ความโค้งสามารถกำหนดได้จากภายนอกโดยสัมพันธ์กับปริภูมิ โดยรอบ ส่วน ความโค้งของแมนิโฟลด์แบบรีมันน์ที่มีมิติอย่างน้อยสอง สามารถกำหนดได้จากภายในโดยไม่ต้องอ้างอิงถึงปริภูมิที่ใหญ่กว่า
สำหรับเส้นโค้ง ความโค้งจะอธิบายถึงความหักงอของเส้นโค้งนั้น ตัวอย่างที่รู้จักกันดีคือวงกลม วงกลมที่มีขนาดเล็กกว่าจะหักงอได้ง่ายกว่าและจึงมีความโค้งสูงกว่า สำหรับจุดใดจุดหนึ่งบนเส้นโค้งทั่วไป ทิศทางของเส้นโค้งจะถูกอธิบายโดยเส้นสัมผัสความหักงอของเส้นโค้ง ณ จุดนั้นสามารถวัดได้จากปริมาณการเปลี่ยนแปลงทิศทางของเส้นสัมผัสต่อหน่วยระยะทางตามเส้นโค้ง
ความโค้งเป็นการวัด อัตราการเปลี่ยนแปลง เชิงมุมของทิศทางของเส้นสัมผัส หรือเวกเตอร์สัมผัสหน่วยของเส้นโค้งต่อหน่วยระยะทางตามแนวเส้นโค้ง ความโค้งแสดงในหน่วยเรเดียนต่อหน่วยระยะทาง สำหรับวงกลม อัตราการเปลี่ยนแปลงนั้นจะเท่ากันทุกจุดบนวงกลมและเท่ากับส่วนกลับ ของ รัศมีวงกลมเส้นตรงไม่เปลี่ยนทิศทางและมีความโค้งเป็นศูนย์ ความโค้ง ณ จุดใดจุดหนึ่งบนเส้นโค้งที่หาอนุพันธ์ได้ สองครั้ง คือขนาดของเวกเตอร์ความโค้งณ จุดนั้น และยังเป็นความโค้งของวงกลมสัมผัสซึ่งเป็นวงกลมที่ประมาณเส้นโค้งได้ดีที่สุดใกล้จุดนั้น
สำหรับพื้นผิว (และโดยทั่วไปสำหรับแมนิโฟลด์ มิติสูงกว่า ) ที่ฝังอยู่ในปริภูมิยูคลิดแนวคิดเรื่องความโค้งนั้นซับซ้อนกว่า เนื่องจากขึ้นอยู่กับการเลือกทิศทางบนพื้นผิวหรือแมนิโฟลด์ ซึ่งนำไปสู่แนวคิดเรื่องความโค้งสูงสุดความโค้งต่ำสุดและ ความ โค้ง เฉลี่ย
ประวัติศาสตร์
ประวัติศาสตร์ของความโค้งเริ่มต้นจาก ความแตกต่างพื้นฐานระหว่างเส้นตรงและเส้นโค้งของ ชาวกรีกโบราณโดยแนวคิดนี้ได้รับการพัฒนาต่อมาโดยบุคคลสำคัญอย่างอริสโตเติลและอพอลโลเนียสการพัฒนาแคลคูลัสในศตวรรษที่ 17 โดยเฉพาะอย่างยิ่งโดยนิวตันและไลบ์นิซ ได้มอบเครื่องมือในการคำนวณความโค้งของเส้นโค้งอย่างเป็นระบบ จากนั้นออยเลอร์ได้ขยายการศึกษาไปยังพื้นผิว ตามมาด้วยความเข้าใจที่สำคัญของเกาส์เกี่ยวกับความโค้ง "ที่แท้จริง" ซึ่งเป็นอิสระจากวิธีที่พื้นผิวถูกฝังอยู่ในอวกาศ และการสรุปทั่วไปของรีมันน์ไปยังมิติที่สูงกว่า[ 1 ]
ในTractatus de configurationibus qualitatum et motuum [ 2 ]นักปรัชญาและนักคณิตศาสตร์ในศตวรรษที่ 14 นิโคล โอเรสเมได้นำเสนอแนวคิดเรื่องความโค้งเป็นการวัดการเบี่ยงเบนจากเส้นตรง สำหรับวงกลม เขามีความโค้งเป็นสัดส่วนผกผันกับรัศมี และเขาพยายามขยายแนวคิดนี้ไปยังเส้นโค้งอื่นๆ ในฐานะขนาดที่เปลี่ยนแปลงอย่างต่อเนื่อง[ 3 ]
ความโค้งของเส้นโค้งที่หาอนุพันธ์ได้นั้นเดิมทีถูกกำหนดผ่านวงกลมสัมผัสในการตั้งค่านี้Augustin-Louis Cauchyแสดงให้เห็นว่าศูนย์กลางความโค้งคือจุดตัดของเส้นตั้งฉากสองเส้น ที่อยู่ใกล้ เส้นโค้ง อย่างไม่มีที่สิ้นสุด [ 4 ]
เส้นโค้ง
โดยสัญชาตญาณแล้ว ความโค้งอธิบายถึงการเปลี่ยนแปลงทิศทางของเส้นโค้งในแต่ละส่วนเมื่อเคลื่อนที่ไปตามระยะทางสั้นๆ ทิศทางของเส้นโค้ง ณ จุดใดๆPจะถูกอธิบายด้วยเวกเตอร์สัมผัสหน่วยTส่วนหนึ่งของเส้นโค้งเรียกว่าส่วนโค้ง และความยาวตามเส้นโค้งเรียก ว่าความยาว ส่วนโค้งsดังนั้น ความโค้งสำหรับส่วนเล็กๆ ของเส้นโค้งคือ มุมของการเปลี่ยนแปลงทิศทางของเวกเตอร์สัมผัสหารด้วยความยาวส่วนโค้งΔsสำหรับเส้นโค้งทั่วไปที่มีความโค้งแปรผันไปตามความยาว ความโค้ง ณ จุดPบนเส้นโค้งคือลิมิตของความโค้งของส่วนที่ผ่านจุดPเมื่อความยาวของส่วนนั้นเข้าใกล้ศูนย์ สำหรับเส้นโค้งที่หาอนุพันธ์ได้สองครั้ง ลิมิตนั้นคือขนาดของอนุพันธ์ของเวกเตอร์สัมผัสหน่วยเทียบกับความยาวส่วนโค้ง โดยใช้ตัวอักษรกรีกตัวเล็กkappaแทนความโค้ง:

ความโค้งเป็นสมบัติทางเรขาคณิตเชิงอนุพันธ์ของเส้นโค้ง มันไม่ขึ้นอยู่กับการกำหนดพารามิเตอร์ของเส้นโค้ง โดยเฉพาะอย่างยิ่ง มันไม่ขึ้นอยู่กับทิศทางของเส้นโค้งที่กำหนดพารามิเตอร์ไว้ กล่าวคือ ทิศทางใดตามเส้นโค้งที่สัมพันธ์กับค่าพารามิเตอร์ที่เพิ่มขึ้น
การกำหนดพารามิเตอร์ความยาวส่วนโค้ง
เส้นโค้งที่กำหนดพารามิเตอร์ด้วยความยาวส่วนโค้งคือฟังก์ชันค่าเวกเตอร์ซึ่งแสดงด้วยอักษรกรีกแกมมาที่มีขีดบนซึ่งอธิบายตำแหน่งของจุดบนเส้นโค้งPในแง่ของระยะทางความยาวส่วน โค้ง s ตามเส้นโค้งจากจุดอ้างอิงอื่นบนเส้นโค้ง ดังนั้นสำหรับช่วงI = [ a , b ]ใน: ฉัน → nกับ


ถ้าถ้าเส้นโค้งนั้นสามารถหาอนุพันธ์ได้ อนุพันธ์อันดับแรกของเส้นโค้งนั้นก็คือ...,′( s )คือเวกเตอร์สัมผัสหน่วยT ( s )และ


ถ้าสามารถหาอนุพันธ์อันดับสองได้ อนุพันธ์อันดับสองของคือT ′( s )ซึ่งก็คือเวกเตอร์ความโค้งK ( s )เช่น กัน

ความโค้งคือขนาดของอนุพันธ์อันดับสองของ.

พารามิเตอร์sสามารถตีความได้ว่าเป็นพารามิเตอร์เวลาด้วยเช่นกัน จากนั้น(s) อธิบายเส้นทางของอนุภาคที่เคลื่อนที่ไปตามเส้นโค้งด้วยความเร็วคงที่หนึ่งหน่วย ความโค้งสามารถเข้าใจได้ว่าเป็นการวัดว่าทิศทางการหมุนของอนุภาคเร็วแค่ไหน[ 5 ]
การกำหนดพารามิเตอร์ทั่วไป
เส้นโค้งที่หาอนุพันธ์ได้สองครั้งγ : [ a , b ] → nซึ่งไม่ได้กำหนดพารามิเตอร์ด้วยความยาวส่วนโค้ง สามารถกำหนดพารามิเตอร์ใหม่ด้วยความยาวส่วนโค้งได้ก็ต่อเมื่อγ ′(t)ไม่เป็นศูนย์ทุกที่ ดังนั้น1/‖ γ ′(t) ‖จึงเป็นจำนวนบวกที่มีค่าจำกัดเสมอ
พารามิเตอร์ความยาวส่วนโค้งsถูกกำหนดโดย

ซึ่งมีฟังก์ชันผกผันt ( s )การกำหนดพารามิเตอร์ความยาวส่วนโค้งคือฟังก์ชันซึ่งกำหนดไว้ดังนี้

ทั้งγและลากเส้นทางเดียวกันเข้าไปและดังนั้นจึงมีเวกเตอร์ความโค้งและความโค้งเดียวกันที่แต่ละจุดPบนเส้นโค้ง สำหรับค่าs ที่กำหนด และt = t ( s ) ที่สอดคล้องกัน จุดPและเวกเตอร์สัมผัสหน่วยTเวกเตอร์ความโค้งKและความโค้งκคือ:





เวกเตอร์ความโค้งKคือส่วนประกอบตั้งฉากของ γ ′′( t ) / ‖ γ ′( t ) ‖ 2 เทียบกับเวกเตอร์สัมผัส γ ′( t )สิ่งนี้สะท้อนให้เห็นในนิพจน์ที่สองสำหรับความโค้งด้วยเช่นกัน: นิพจน์ภายในวงเล็บคือcos θโดยที่θคือมุมระหว่างเวกเตอร์Tและγ ′′( t )ดังนั้นรากที่สองจึงได้ sin θ
ถ้าγเป็นฟังก์ชันที่หาอนุพันธ์อันดับสองได้อย่างต่อเนื่องs(t)ก็ จะเป็นฟังก์ชันที่หาอนุพันธ์อันดับสองได้อย่างต่อเนื่องเช่นกันในขณะที่T ( t )สามารถหาอนุพันธ์ได้อย่างต่อเนื่อง และK ( t )และκ ( t )เป็นฟังก์ชันต่อเนื่อง
บ่อยครั้งที่การกำหนดพารามิเตอร์ความยาวส่วนโค้งนั้นทำได้ยากหรือเป็นไปไม่ได้ในรูปแบบปิดแม้ว่าγจะถูกกำหนดในรูปแบบปิดก็ตาม โดยทั่วไปแล้วกรณีนี้มักเกิดขึ้นเมื่อยากหรือเป็นไปไม่ได้ที่จะแสดงs ( t )หรือส่วนกลับt ( s )ในรูปแบบปิด อย่างไรก็ตาม ความโค้งสามารถแสดงได้เฉพาะในแง่ของอนุพันธ์อันดับที่หนึ่งและอันดับที่สองของγโดยไม่ต้องอ้างอิงโดยตรงถึง.
เวกเตอร์ความโค้ง
เวกเตอร์ความโค้ง ซึ่งแทนด้วยตัวอักษรK ตัวใหญ่ คืออนุพันธ์ของเวกเตอร์สัมผัสหน่วยTเทียบกับความยาวส่วนโค้งs :

เวกเตอร์ความโค้งแสดงถึงทั้งทิศทางที่เส้นโค้งกำลังเลี้ยวไป และความแตกต่างของมุมการเลี้ยวด้วย
เวกเตอร์ความโค้งมีคุณสมบัติดังต่อไปนี้:
- ขนาดของเวกเตอร์ความโค้งคือค่าความโค้ง:

- เวกเตอร์ความโค้งตั้งฉากกับเวกเตอร์สัมผัสหน่วยTหรือกล่าวอีกนัยหนึ่งคือ ผลคูณดอท:

- เวกเตอร์ความโค้งคืออนุพันธ์อันดับสองของพารามิเตอร์ความยาวส่วนโค้ง:

- เวกเตอร์ความโค้งของการกำหนดพารามิเตอร์ทั่วไปγคือส่วนประกอบตั้งฉากของγ ′′( t ) / ‖ γ ′( t ) ‖ 2เทียบกับเวกเตอร์สัมผัสγ ′( t ) : ถ้าเส้นโค้งอยู่ในเวกเตอร์ความโค้งสามารถแสดงได้ดังนี้: โดยที่ × แทน ผลคูณเวก เตอร์ไขว้



- ถ้าเวกเตอร์ความโค้งไม่เป็นศูนย์:
- เวกเตอร์ความโค้งชี้จากจุดP บนเส้นโค้ง ไปในทิศทางของจุดศูนย์กลางของวงกลมสัมผัส
- เวกเตอร์ความโค้งและเวกเตอร์สัมผัสเป็นเวกเตอร์ตั้งฉากกันที่ทอดผ่านระนาบสัมผัส ซึ่งเป็นระนาบที่บรรจุวงกลมสัมผัส
- เวกเตอร์ความโค้งที่ปรับขนาดให้มีความยาวหนึ่งหน่วยคือเวกเตอร์ปกติหนึ่งหน่วยN :

- เวกเตอร์ความโค้งเป็นสมบัติทางเรขาคณิตเชิงอนุพันธ์ของเส้นโค้งที่จุดPโดยไม่ขึ้นอยู่กับวิธีการกำหนดพารามิเตอร์ของเส้นโค้ง
วงกลมสัมผัส
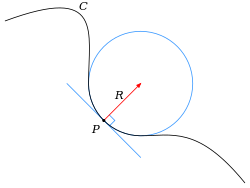
ในอดีต ความโค้งของเส้นโค้งที่หาอนุพันธ์ได้นั้นถูกนิยามโดยใช้วงกลมสัมผัสซึ่งเป็นวงกลมที่ประมาณเส้นโค้ง ณ จุดนั้นได้ดีที่สุด กล่าวให้แม่นยำยิ่งขึ้นคือ เมื่อกำหนดจุดPบนเส้นโค้ง จุด Q อื่นๆ ทุกจุด บนเส้นโค้งจะกำหนดวงกลม (หรือบางครั้งก็เป็นเส้นตรง) ที่ผ่านจุดQและสัมผัสกับเส้นโค้งที่จุดPวงกลมสัมผัสคือลิมิต (ถ้ามี) ของวงกลมนี้เมื่อQเข้าใกล้Pดังนั้นจุดศูนย์กลางความโค้งและรัศมีความโค้งของเส้นโค้งที่จุดPจึงเป็นจุดศูนย์กลางและรัศมีของวงกลมสัมผัส
รัศมีของความโค้งRเป็นส่วนกลับของความโค้ง[ 6 ]โดยที่ความโค้งไม่เป็นศูนย์:

สำหรับเส้นโค้งγ เนื่องจากเวก เตอร์ความโค้งที่ไม่เป็นศูนย์K ( t )ชี้จากจุดP = γ ( t )ไปยังจุดศูนย์กลางความโค้ง แต่ขนาดของK ( t )คือความโค้งκ ( t )ดังนั้นจุดศูนย์กลางความโค้งC ( t )จึงเป็น

เมื่อความโค้งเป็นศูนย์ เช่น บนเส้นตรงหรือที่จุดเปลี่ยนความโค้ง รัศมีของความโค้งจะเป็นอนันต์ และจุดศูนย์กลางของความโค้งจะไม่สามารถระบุได้ หรือ "อยู่ที่อนันต์"
ความโค้งจากส่วนโค้งและความยาวคอร์ด
กำหนดให้จุด PและQสองจุดอยู่บนเส้นโค้งγให้s ( P , Q )เป็นความยาวส่วนโค้งของเส้นโค้งระหว่างPและQและให้d ( P , Q )เป็นความยาวของส่วนของเส้นตรงจากPไปยังQความโค้งของγที่จุด Pหาได้จากลิมิต

โดยที่ลิมิตนั้นพิจารณาจากจุดQที่เข้าใกล้Pบนγตัวส่วนสามารถกำหนดให้เป็นd ( P , Q ) 3 ได้เช่นกัน สูตรนี้ใช้ได้ในทุกมิติ สูตรนี้ได้มาจากการตรวจสอบกับวงกลมสัมผัส
กรณีพิเศษ
อาจมีบางสถานการณ์ที่เงื่อนไขเบื้องต้นของสูตรข้างต้นไม่เป็นไปตามที่กำหนด แต่การนำแนวคิดเรื่องความโค้งมาใช้ยังคงเหมาะสมอยู่
อาจเป็นประโยชน์ที่จะนำแนวคิดเรื่องความโค้งมาใช้กับเส้นโค้งγที่จุดP = γ ( t 0 )หากอนุพันธ์ด้านเดียวของγ ′( t 0 )มีอยู่แต่มีค่าต่างกัน หรือในทำนองเดียวกันสำหรับγ ′′( t 0 )ในกรณีเช่นนี้ การอธิบายเส้นโค้งด้วยความโค้งที่แต่ละด้านอาจเป็นประโยชน์ ซึ่งอาจเป็นกรณีของเส้นโค้งที่สร้างขึ้นเป็นช่วงๆ
อีกสถานการณ์หนึ่งเกิดขึ้นเมื่อค่าลิมิตของอัตราส่วนส่งผลให้ค่าความโค้งเป็น ค่า 0/0 ที่ไม่สามารถ ระบุได้ เช่น เมื่ออนุพันธ์ทั้งสองมีอยู่แต่เป็นศูนย์ทั้งคู่ ในกรณีเช่นนี้ อาจสามารถประเมินค่าลิมิตพื้นฐานได้โดยใช้กฎของโลปิตาล
ตัวอย่าง
ต่อไปนี้เป็นตัวอย่างของเส้นโค้งพร้อมการประยุกต์ใช้แนวคิดและสูตรที่เกี่ยวข้อง
วงกลม

คำอธิบายทางเรขาคณิตว่าทำไมความโค้งของวงกลมรัศมีRที่จุดP ใดๆ จึงเท่ากับ1/ Rนั้น แสดงให้เห็นได้บางส่วนจากแผนภาพทางด้านขวา
ความยาวของส่วนโค้งสีแดงคือLและขนาดของมุมศูนย์กลางของส่วนโค้ง (มุม ACB) ในหน่วยเรเดียนคือL / Rมุมระหว่างเส้นสัมผัสที่ปลายส่วนโค้งคือมุม BDE ซึ่งมีขนาดเท่ากับมุมศูนย์กลาง เนื่องจากทั้งสองมุมเป็นมุมเสริมกับมุม BDA
อัตราส่วนของมุมระหว่างเส้นสัมผัสที่จุดปลายของส่วนโค้ง ซึ่งวัดเป็นเรเดียน หารด้วยความยาวส่วนโค้งL คือ ( L / R ) / L = 1/ R
เนื่องจากอัตราส่วนคือ1/ Rสำหรับส่วนโค้งใดๆ ของวงกลมที่มีความยาวน้อยกว่าครึ่งวงกลม ดังนั้นสำหรับส่วนโค้งที่ผ่านจุดP ใดๆ บนวงกลม ค่าลิมิตของอัตราส่วนเมื่อความยาวส่วนโค้งเข้าใกล้ศูนย์ก็คือ1/ R เช่นกัน ดังนั้นความโค้งของวงกลมที่จุดP ใดๆ จึง เท่ากับ1/ R
การกำหนดพารามิเตอร์ทั่วไปของวงกลมรัศมีrคือγ ( t ) = ( r cos t , r sin t )จากนั้น สูตรทั่วไปสำหรับความโค้งจะให้ และสูตรสำหรับเส้นโค้งระนาบจะให้



ดังนั้น จึงสรุปได้ว่า รัศมีของความโค้งคือรัศมีของวงกลม และจุดศูนย์กลางของความโค้งคือจุดศูนย์กลางของวงกลม
วงกลมเป็นกรณีพิเศษที่การกำหนดพารามิเตอร์ด้วยความยาวส่วนโค้งนั้นคำนวณได้ง่าย เนื่องจาก ค่าบรรทัดฐานของวงกลม เท่ากับหนึ่ง ดังนั้นจึง ให้ค่าความโค้งเดียวกัน



วงกลมเดียวกันนี้สามารถกำหนดได้ด้วยสมการโดยปริยายF ( x , y ) = 0โดยที่F ( x , y ) = x² + y² – r²จากนั้น สูตรสำหรับความโค้งในกรณีนี้จะ ให้ค่าดังนี้

พาราโบลา

พิจารณาพาราโบลาy = ax² + bx + c
นี่คือกราฟของฟังก์ชันที่มีอนุพันธ์อันดับสองเท่ากับ2 ax + bและอนุพันธ์อันดับสองเท่ากับ2 aดังนั้น ความโค้งแบบมีเครื่องหมายคือ โดยมีเครื่องหมายเป็นaสำหรับทุกค่าของxซึ่งหมายความว่า ถ้าa > 0ความโค้งจะชี้ขึ้นทุกจุด ถ้าa < 0ความโค้งจะชี้ลง และสำหรับa = 0ความโค้งจะเป็นศูนย์ทุกจุด ซึ่งยืนยันว่าพาราโบลาจะกลายเป็นเส้นตรงในกรณีนี้

ความโค้ง (ที่ไม่มีเครื่องหมาย) จะมีค่าสูงสุดเมื่อx = – ข/2 ก.นั่นคือ ณจุดนิ่ง (อนุพันธ์เป็นศูนย์) ของฟังก์ชัน ซึ่งก็คือจุดยอดของพาราโบลา
พิจารณาการกำหนดพารามิเตอร์γ ( t ) = ( t , at 2 + bt + c ) = ( x , y )อนุพันธ์อันดับแรกของxคือ1 และอนุพันธ์อันดับสองคือศูนย์ การแทนค่าลงในสูตรสำหรับการ กำหนด พารามิเตอร์ทั่วไปจะให้ผลลัพธ์ที่เหมือนกับข้างต้นทุกประการ โดยที่xแทนด้วยtและเครื่องหมายไพรม์หมายถึงอนุพันธ์เทียบกับพารามิเตอร์t
พาราโบลาเดียวกันนี้สามารถกำหนดได้ด้วยสมการโดยปริยายF ( x , y ) = 0โดยที่F ( x , y ) = ax² + bx + c – yเนื่องจากFy = –1และFyy = Fxy = 0 จึงได้ค่าความโค้ง ( แบบ ไม่ระบุ เครื่องหมาย ) ที่เท่ากัน อย่างไรก็ตาม ความโค้งแบบระบุเครื่องหมาย นั้นไม่สามารถกำหนดได้สำหรับสมการโดยปริยาย เนื่องจากความโค้งแบบระบุเครื่องหมายขึ้นอยู่กับทิศทางของเส้นโค้งซึ่งไม่ได้ระบุไว้ในสมการโดยปริยาย
เส้นโค้งระนาบ
ให้γ ( t ) = ( x ( t ), y ( t ))เป็นการแสดงพาราเมตริก ที่เหมาะสม ของเส้นโค้งระนาบที่หาอนุพันธ์ได้สองครั้ง ในที่นี้ คำว่า "เหมาะสม"หมายความว่า บนโดเมนของการนิยามพาราเมตริก อนุพันธ์d γ/d tมี อยู่จริง และไม่เท่ากับเวกเตอร์ศูนย์ที่ใดเลย
ความโค้งκของเส้นโค้งระนาบสามารถแสดงได้ในรูปแบบเฉพาะสำหรับสองมิติ เช่น

โดยที่เครื่องหมายไพรม์หมาย ถึง อนุพันธ์เทียบกับt
สามารถแสดงสิ่งนี้ใน รูปแบบ ที่ไม่ขึ้นกับพิกัดได้ดังนี้

โดยที่ตัวเศษคือค่าสัมบูรณ์ของดีเทอร์มิแนนต์ของเมทริกซ์ 2x2 ที่มีγ ′และγ ′′เป็นคอลัมน์
สูตรเหล่านี้สามารถเข้าใจได้ว่าเป็นการประยุกต์ใช้ สูตร ผลคูณเวกเตอร์สำหรับความโค้งในสามมิติเนื่องจากตัวดำเนินการมีค่าเป็นศูนย์ในมิติที่สาม ผลลัพธ์ของผลคูณเวกเตอร์จะมีค่าเป็นศูนย์สำหรับสองมิติแรก ดังนั้นเฉพาะค่าในมิติที่สามเท่านั้นที่มีความสำคัญต่อการคำนวณขนาดของผลคูณเวกเตอร์ สูตรสำหรับค่าของมิติที่สามจึงปรากฏอยู่ในตัวเศษของสูตรข้างต้น
ความโค้งที่ลงนาม
สำหรับเส้นโค้งระนาบ การแสดงความโค้งเป็นค่าสเกลาร์เดียวที่สามารถเป็นบวกหรือลบได้นั้น อาจเป็นประโยชน์ โดยเรียกว่าความโค้งแบบมีเครื่องหมายหรือความโค้งแบบกำหนดทิศทางและใช้ตัวอักษร k ตัวเล็กแทน สูตรของความโค้งแบบมีเครื่องหมายนั้นคล้ายกับสูตรสำหรับκยกเว้นว่าจะไม่ต้องใช้ค่าสัมบูรณ์ของตัวเศษ:

ดังนั้นk = ± κ ค่า kจะเป็นบวกหรือลบนั้นขึ้นอยู่กับทิศทางของเส้นโค้ง ค่าk ที่เป็นบวก จะสอดคล้องกับ การหมุน ตามเข็มนาฬิกาหรือทวนเข็มนาฬิกาขึ้นอยู่กับทิศทางของเส้นโค้งและทิศทางของแกนพิกัดด้วยทิศทางมาตรฐานของแกนพิกัดเมื่อเคลื่อนที่ไปตามเส้นโค้งในทิศทางที่t เพิ่มขึ้น ค่าkจะเป็นบวกถ้าเส้นโค้งหมุนไปทางซ้ายทวนเข็มนาฬิกา และจะเป็นลบถ้าเส้นโค้งหมุนไปทางขวาตามเข็มนาฬิกา ซึ่งสอดคล้องกับธรรมเนียมที่ถือว่าการหมุนทวนเข็มนาฬิกาเป็นการหมุนผ่านมุมบวกอย่างไรก็ตาม เนื่องจากเครื่องหมายของkขึ้นอยู่กับทิศทางของการกำหนดพารามิเตอร์kจึงไม่ใช่ คุณสมบัติ ทางเรขาคณิตเชิงอนุพันธ์ของเส้นโค้ง
ยกเว้นปัญหาเรื่องทิศทาง ความโค้งที่มีเครื่องหมายสำหรับเส้นโค้งระนาบจะเก็บข้อมูลที่คล้ายคลึงกับเวกเตอร์ความโค้ง ซึ่งสำหรับเส้นโค้งระนาบนั้นจะถูกจำกัดไว้ที่มิติเดียว คือเส้นที่ตั้งฉากกับเวกเตอร์สัมผัสหน่วย
โดยใช้การวางแนวแกนพิกัดมาตรฐาน ให้ให้ เป็นเวกเตอร์ปกติหน่วยที่ได้จากเวกเตอร์สัมผัสหน่วยTโดยการหมุนทวนเข็มนาฬิกาπ/2จากนั้นขึ้นอยู่กับทิศทางของเส้นโค้งและชี้ไปทางซ้ายเมื่อเคลื่อนที่ไปตามเส้นโค้งในทิศทางที่t เพิ่มขึ้น อย่างไรก็ตาม เวกเตอร์ความโค้งKเท่ากับผลคูณของความโค้งแบบมีเครื่องหมายkและ เนื่องจากความสัมพันธ์เชิงทิศทางของพวกมันหักล้างกันเอง:

ในทำนองเดียวกัน จุดศูนย์กลางความโค้งสามารถแสดงได้โดยใช้ความโค้งแบบมีเครื่องหมายและ:

กราฟของฟังก์ชัน
กราฟของฟังก์ชันy = f ( x )เป็นกรณีพิเศษของเส้นโค้งพาราเมตริก ซึ่งมีรูปแบบดังนี้ เนื่องจากอนุพันธ์อันดับที่หนึ่งและอันดับที่สองของxคือ 1 และ 0 สูตรก่อนหน้านี้จึงลดรูปเหลือ สำหรับความโค้ง และเหลือ สำหรับความโค้งแบบมีเครื่องหมาย



โดยทั่วไปแล้ว ในกรณีของเส้นโค้ง เครื่องหมายของความโค้งที่มีเครื่องหมายนั้นค่อนข้างไม่แน่นอน เนื่องจากขึ้นอยู่กับทิศทางของเส้นโค้ง แต่ในกรณีของกราฟฟังก์ชัน จะมีทิศทางที่เป็นธรรมชาติโดยค่าx ที่เพิ่มขึ้น ซึ่งทำให้เครื่องหมายของความโค้งที่มีเครื่องหมายมีความสำคัญมากขึ้น
เครื่องหมายของค่าความโค้งแบบมีเครื่องหมายจะเหมือนกับเครื่องหมายของอนุพันธ์อันดับสองของfถ้าเป็นบวก กราฟจะมีลักษณะโค้งขึ้น และถ้าเป็นลบ กราฟจะมีลักษณะโค้งลง ถ้าเป็นศูนย์ จะมีจุดเปลี่ยนเว้าหรือจุดคลื่น
เมื่อความชันของกราฟ (ซึ่งก็คืออนุพันธ์ของฟังก์ชัน) มีค่าน้อย ความโค้งแบบมีเครื่องหมายจะถูกประมาณค่าได้ดีด้วยอนุพันธ์อันดับสอง กล่าวให้แม่นยำยิ่งขึ้น โดยใช้สัญกรณ์บิ๊กโอจะได้ว่า

ใน วิชาฟิสิกส์และวิศวกรรมศาสตร์เป็นเรื่องปกติที่จะประมาณความโค้งด้วยอนุพันธ์อันดับสอง ตัวอย่างเช่น ในทฤษฎีคานหรือในการหาอนุพันธ์ของสมการคลื่นของสายที่ถูกดึง และการประยุกต์ใช้งานอื่นๆ ที่เกี่ยวข้องกับความชันเล็กน้อย วิธีนี้มักช่วยให้ระบบที่ไม่เป็นเชิงเส้นสามารถถูกมองว่าเป็นเชิงเส้นได้โดยประมาณ
เส้นโค้งโดยนัย
สำหรับเส้นโค้งที่กำหนดโดยสมการโดยปริยายF ( x , y ) = 0โดยมีอนุพันธ์ย่อยที่แสดงด้วย F x , F y , F xx , F xy , F yyความโค้งจะกำหนดโดย[ 7 ]

ความโค้งที่มีเครื่องหมายไม่ชัดเจน เนื่องจากขึ้นอยู่กับทิศทางของเส้นโค้งซึ่งไม่ได้ระบุไว้ในสมการโดยปริยาย โปรดทราบว่าการเปลี่ยนFเป็น –F จะไม่เปลี่ยนแปลงเส้นโค้งที่กำหนดโดยF ( x , y ) = 0แต่จะเปลี่ยนเครื่องหมายของตัวเศษหากละเว้น ค่าสัมบูรณ์ ในสูตรก่อนหน้า
จุดบนเส้นโค้งที่F x = F y = 0เรียกว่าจุดเอกฐานซึ่งหมายความว่าเส้นโค้งนั้นไม่สามารถหาอนุพันธ์ได้ที่จุดนี้ และด้วยเหตุนี้ ความโค้งจึงไม่สามารถหาค่าได้ (ส่วนใหญ่แล้ว จุดนี้จะเป็นจุดตัดหรือจุดแหลม )
สูตรข้างต้นสำหรับความโค้งสามารถได้มาจากการแสดงออกของความโค้งของกราฟของฟังก์ชันโดยใช้ทฤษฎีบทฟังก์ชันโดยปริยายและข้อเท็จจริงที่ว่า บนเส้นโค้งดังกล่าวจะมี

พิกัดเชิงขั้ว
ถ้าเส้นโค้งถูกกำหนดในพิกัดเชิงขั้วโดยรัศมีที่แสดงเป็นฟังก์ชันของมุมเชิงขั้ว นั่นคือrเป็นฟังก์ชันของθแล้วความโค้งของเส้นโค้งนั้นคือ โดย ที่เครื่องหมายไพรม์หมายถึงการหาอนุพันธ์เทียบกับθ

ผลลัพธ์นี้ได้มาจากสูตรสำหรับการกำหนดพารามิเตอร์ทั่วไป โดยพิจารณาจากการกำหนดพารามิเตอร์

หวีโค้ง

สามารถใช้หวีความโค้ง [ 8 ] เพื่อแสดงความโค้งของทุกจุดบนเส้นโค้งในเชิงกราฟิกได้ หากγ เป็นเส้นโค้งที่กำหนดพารามิเตอร์tหวีของ γ จะถูกกำหนดเป็นเส้นโค้งที่กำหนดพารามิเตอร์โดย ที่κคือความโค้งNคือเวกเตอร์ปกติหน่วยที่ชี้ไปยังจุดศูนย์กลางของความโค้ง และsคือปัจจัยการปรับขนาดที่เลือกเพื่อเพิ่มประสิทธิภาพการแสดงผลกราฟิก

เครื่องมือแสดงเส้นโค้ง (Curvature combs) มีประโยชน์เมื่อต้องการรวมเส้นโค้งสองเส้นที่แตกต่างกันในสภาพแวดล้อม CAD มันช่วยแสดงความต่อเนื่องระหว่างเส้นโค้งได้อย่างชัดเจน โดยความต่อเนื่องสามารถกำหนดได้เป็น 4 ระดับ
G0 : หวีโค้งทั้งสองอันทำมุมกันตรงจุดเชื่อมต่อ
G1: ซี่หวีทั้งสองขนานกันตรงจุดเชื่อมต่อ แต่มีความยาวต่างกัน
G2: ซี่หวีขนานกันและมีความยาวเท่ากัน อย่างไรก็ตาม เส้นสัมผัสของซี่หวีทั้งสองไม่เท่ากัน
G3: ฟันหวีขนานกันและมีความยาวเท่ากัน และเส้นสัมผัสของหวีทั้งสองข้างก็เท่ากัน
ภาพด้านบนแสดงความต่อเนื่องแบบ G2 ที่จุดเชื่อมต่อทั้ง 2 จุด
สูตร Frenet–Serret สำหรับเส้นโค้งระนาบ

สูตรFrenet–Serret สูตรแรกเชื่อมโยงเวกเตอร์สัมผัสหน่วย ความโค้ง และเวกเตอร์ตั้งฉากของการกำหนดพารามิเตอร์ความยาวส่วนโค้ง โดยที่เครื่องหมายไพรม์หมายถึงอนุพันธ์เทียบกับความยาวส่วนโค้งsและN ( s )คือเวกเตอร์หน่วยตั้งฉากในทิศทางของT ′ (s )

เนื่องจากเส้นโค้งระนาบมีการบิด เป็นศูนย์ สูตร Frenet–Serret ข้อที่สองจึงให้ความสัมพันธ์ดังนี้

สำหรับการกำหนดพารามิเตอร์ทั่วไปโดยใช้พารามิเตอร์tนั้น จำเป็นต้องใช้สูตรที่มีอนุพันธ์เทียบกับtเนื่องจากสูตรเหล่านี้ได้มาจากการคูณด้วยดีเอส/ดีทีอนุพันธ์เทียบกับsจะได้ว่า สำหรับการกำหนดพารามิเตอร์ที่เหมาะสมใดๆ

เส้นโค้งในสามมิติ

สำหรับเส้นโค้งที่กำหนดโดยพารามิเตอร์ในสามมิติซึ่งกำหนดในพิกัดคาร์ทีเซียนโดยγ ( t ) = ( x ( t ), y ( t ), z ( t ))ความโค้งคือ

โดยที่เครื่องหมายไพรม์แสดงถึงการหาอนุพันธ์เทียบกับพารามิเตอร์tทั้งความโค้ง[ 9 ]และเวกเตอร์ความโค้งสามารถแสดงได้โดยใช้ผลคูณเวกเตอร์ไขว้และเวกเตอร์สัมผัสหน่วยT :


สูตรเหล่านี้เกี่ยวข้องกับสูตรทั่วไปสำหรับความโค้งและเวกเตอร์ความโค้ง ยกเว้นว่า สูตร เหล่านี้ใช้ผลคูณเวกเตอร์แทนผลคูณดอทสเกลาร์เพื่อแสดงส่วนประกอบตั้งฉากของγ ′′ / ‖ γ ′ ‖^2เทียบกับγ ′
พื้นผิว
ความโค้งของเส้นโค้งที่วาดบนพื้นผิวเป็นเครื่องมือหลักในการกำหนดและศึกษาความโค้งของพื้นผิว
เส้นโค้งบนพื้นผิว
สำหรับเส้นโค้งที่ลากบนพื้นผิว (ซึ่งฝังอยู่ใน ปริภูมิยูคลิดสามมิติ) จะมีการกำหนดความโค้งหลายแบบ ซึ่งเชื่อมโยงทิศทางของความโค้งกับเวกเตอร์ปกติ หน่วยของพื้นผิว รวมถึง:
เส้นโค้งใดๆ ที่ไม่มีจุดเอกฐานบนพื้นผิวเรียบ จะมีเวกเตอร์สัมผัสTอยู่ในระนาบสัมผัสของพื้นผิวนั้นความโค้งปกติk nคือความโค้งของเส้นโค้งที่ฉายลงบนระนาบที่บรรจุเวกเตอร์สัมผัสT ของเส้นโค้ง และเวกเตอร์ตั้งฉากกับพื้นผิวuความโค้งจีโอเดสิก k g คือความโค้งของเส้นโค้งที่ฉายลงบนระนาบสัมผัสของพื้นผิว และการบิดจีโอเดสิก (หรือการบิดสัมพัทธ์ ) τ rวัดอัตราการเปลี่ยนแปลงของเวกเตอร์ตั้งฉากกับพื้นผิวรอบเวกเตอร์สัมผัสของเส้นโค้ง
ให้เส้นโค้งถูกกำหนดพารามิเตอร์ด้วยความยาวส่วนโค้งและให้t = u × Tโดยที่T , t , uก่อให้เกิดฐานเชิงตั้ง ฉากปกติ เรียกว่ากรอบดาร์บูซ์ปริมาณข้างต้นมีความสัมพันธ์กันดังนี้:

ความโค้งหลัก

เส้นโค้งทั้งหมดบนพื้นผิวที่มีเวกเตอร์สัมผัสเดียวกัน ณ จุดใดจุดหนึ่ง จะมีค่าความโค้งปกติเท่ากัน ซึ่งก็คือค่าความโค้งของเส้นโค้งที่ได้จากการตัดพื้นผิวกับระนาบที่บรรจุTและuโดยพิจารณาเวกเตอร์สัมผัสที่เป็นไปได้ทั้งหมด ค่าความโค้งปกติสูงสุดและต่ำสุด ณ จุดใดจุดหนึ่ง เรียกว่า ค่าความโค้งหลัก k 1 และk 2และทิศทางของเวกเตอร์สัมผัสที่สอดคล้องกัน เรียกว่าทิศทางเวกเตอร์ปกติหลัก
ส่วนปกติ
สามารถประเมินความโค้งตามส่วนตัดตั้งฉาก กับพื้นผิว ได้ คล้ายกับหัวข้อ § เส้นโค้งบนพื้นผิวด้านบน (ดูตัวอย่างเช่นรัศมีความโค้งของโลก )
พื้นผิวที่สามารถคลี่ออกได้
พื้นผิวโค้งบางชนิด เช่น พื้นผิวที่ทำจากแผ่นกระดาษเรียบ สามารถแผ่ราบลงบนระนาบได้โดยไม่ทำให้คุณสมบัติภายในของพื้นผิวนั้นผิดเพี้ยนไปพื้นผิวที่คลี่ออกได้ ดังกล่าว มีค่าความโค้งเกาส์เซียนเป็นศูนย์ (ดูด้านล่าง) [ 10 ]
ความโค้งเกาส์เซียน
ตรงกันข้ามกับเส้นโค้ง ซึ่งไม่มีความโค้งภายใน แต่มีความโค้งภายนอก (ความโค้งจะเกิดขึ้นได้ก็ต่อเมื่อมีการฝังตัว) พื้นผิวสามารถมีความโค้งภายในได้โดยไม่ขึ้นอยู่กับการ ฝังตัว ความโค้งเกาส์เซียนซึ่งตั้งชื่อตามคาร์ล ฟรีดริช เกาส์มีค่าเท่ากับผลคูณของความโค้งหลักk₁ = k₂มีมิติความยาวเท่ากับ-2และมีค่าเป็นบวกสำหรับทรง กลม ค่าเป็นลบสำหรับ ไฮเปอร์โบโลอิดแบบแผ่นเดียวและค่าเป็นศูนย์สำหรับระนาบและทรงกระบอก ค่านี้เป็นตัวกำหนดว่าพื้นผิวนั้นเป็นนูนเฉพาะที่ (เมื่อมีค่าเป็นบวก) หรือเป็นรูปอานม้าเฉพาะที่ (เมื่อมีค่าเป็นลบ)
ความโค้งแบบเกาส์เซียนเป็น คุณสมบัติ ภายในของพื้นผิว หมายความว่ามันไม่ขึ้นอยู่กับการฝังตัวของพื้นผิวในรูปแบบใดรูปแบบหนึ่ง โดยสัญชาตญาณแล้ว หมายความว่ามดที่อาศัยอยู่บนพื้นผิวนั้นสามารถกำหนดความโค้งแบบเกาส์เซียนได้ ตัวอย่างเช่น มดที่อาศัยอยู่บนทรงกลมสามารถวัดผลรวมของมุมภายในของสามเหลี่ยมและกำหนดได้ว่ามันมากกว่า 180 องศา ซึ่งหมายความว่าพื้นที่ที่มันอาศัยอยู่นั้นมีความโค้งเป็นบวก ในทางกลับกัน มดที่อาศัยอยู่บนทรงกระบอกจะไม่สามารถตรวจพบความเบี่ยงเบนใดๆ จากเรขาคณิตแบบยุคลิดได้โดยเฉพาะอย่างยิ่ง มดไม่สามารถตรวจพบได้ว่าพื้นผิวทั้งสองมีความโค้งเฉลี่ยที่แตกต่างกัน (ดูด้านล่าง) ซึ่งเป็นความโค้งประเภทภายนอกอย่างแท้จริง
ตามหลักการแล้ว ความโค้งแบบเกาส์เซียนขึ้นอยู่กับเมตริกแบบรีมันน์ของพื้นผิวเท่านั้น นี่คือทฤษฎีบทเอเกรเกียมอันโด่งดังของเกาส์ซึ่งเขาค้นพบขณะทำการสำรวจทางภูมิศาสตร์และการทำแผนที่
นิยามพื้นฐานของความโค้งเกาส์เซียน ณ จุดPมีดังนี้: ลองนึกภาพมดตัวหนึ่งที่ผูกติดกับจุด Pด้วยเส้นด้ายสั้นๆ ยาวrมันวิ่งวนรอบจุดPในขณะที่เส้นด้ายยืดออกจนสุด และวัดความยาวC ( r ) ของการวิ่งวนรอบจุด Pครบหนึ่งรอบถ้าพื้นผิวเรียบ มดจะพบว่าC ( r ) = 2πr บนพื้นผิวโค้ง สูตรสำหรับC ( r )จะแตกต่างออกไป และความโค้งเกาส์เซียนKณ จุดPสามารถคำนวณได้โดยทฤษฎีบทของ Bertrand–Diguet–Puiseuxดังนี้

ปริมาณอินทิกรัลของความโค้งเกาส์เซียนตลอดทั้งพื้นผิวมีความสัมพันธ์อย่างใกล้ชิดกับลักษณะเฉพาะของออยเลอร์ ของพื้นผิว ดูทฤษฎีบทเกาส์-บอนเนต์ประกอบ
สิ่งที่เทียบเคียงได้กับความโค้งแบบไม่ต่อเนื่อง ซึ่งสอดคล้องกับความโค้งที่กระจุกตัวอยู่ที่จุดใดจุดหนึ่ง และมีประโยชน์อย่างยิ่งสำหรับทรง หลายเหลี่ยมคือข้อบกพร่อง (เชิงมุม)ส่วนสิ่งที่เทียบเคียงได้กับทฤษฎีบทของเกาส์-บอนเนต์คือทฤษฎีบทของเดส์การ์ตเกี่ยวกับข้อบกพร่องเชิงมุมรวม
เนื่องจากความโค้ง (แบบเกาส์เซียน) สามารถกำหนดได้โดยไม่ต้องอ้างอิงถึงปริภูมิฝังตัว จึงไม่จำเป็นที่พื้นผิวจะต้องถูกฝังอยู่ในปริภูมิที่มีมิติสูงกว่าจึงจะโค้งได้ พื้นผิวสองมิติที่โค้งโดยเนื้อแท้เช่นนี้เป็นตัวอย่างง่ายๆ ของแมนิโฟลด์แบบรีมันน์
ความโค้งเฉลี่ย
ความโค้งเฉลี่ยเป็นการ วัดความ โค้งภายนอกซึ่งเท่ากับครึ่งหนึ่งของผลรวมของความโค้งหลัก k 1 + k 2/2ความโค้งเฉลี่ยถูกนำเสนอโดยโซฟี แฌร์แมงในงานของเธอเกี่ยวกับทฤษฎีความยืดหยุ่น มีมิติความยาว −1 ความโค้งเฉลี่ยมีความสัมพันธ์อย่างใกล้ ชิด กับการเปลี่ยนแปลงครั้งแรกของ พื้นที่ผิวโดยเฉพาะอย่างยิ่งพื้นผิวที่เล็กที่สุดเช่นฟิล์มสบู่มีความโค้งเฉลี่ยเป็นศูนย์ และฟองสบู่มีความโค้งเฉลี่ยคงที่ แตกต่างจากความโค้งของเกาส์ ความโค้งเฉลี่ยเป็นค่าภายนอกและขึ้นอยู่กับการฝังตัว ตัวอย่างเช่นทรงกระบอกและระนาบมีสมมาตร เฉพาะที่ แต่ความโค้งเฉลี่ยของระนาบเป็นศูนย์ ในขณะที่ความโค้งเฉลี่ยของทรงกระบอกไม่เป็นศูนย์
รูปแบบพื้นฐานที่สอง
ความโค้งภายในและภายนอกของพื้นผิวสามารถรวมกันได้ในรูปแบบพื้นฐานที่สอง นี่คือรูปแบบกำลังสองในระนาบสัมผัสกับพื้นผิว ณ จุดหนึ่งซึ่งค่า ณ เวกเตอร์สัมผัสX เฉพาะเจาะจง กับพื้นผิวคือส่วนประกอบปกติของความเร่งของเส้นโค้งตามพื้นผิวที่สัมผัสกับXกล่าวคือ เป็นความโค้งปกติของเส้นโค้งที่สัมผัสกับX (ดูด้านบน ) ในเชิงสัญลักษณ์

โดยที่Nคือเวกเตอร์หน่วยตั้งฉากกับพื้นผิว สำหรับเวกเตอร์สัมผัสหน่วยXรูปแบบพื้นฐานที่สองจะมีค่าสูงสุดk 1และค่าต่ำสุดk 2ซึ่งเกิดขึ้นในทิศทางหลักu 1และu 2ตามลำดับ ดังนั้น โดยทฤษฎีบทแกนหลักรูปแบบพื้นฐานที่สองคือ

ดังนั้น รูปแบบพื้นฐานที่สองจึงเข้ารหัสทั้งความโค้งภายในและภายนอก
ตัวดำเนินการรูปร่าง
การห่อหุ้มความโค้งของพื้นผิวสามารถพบได้ในตัวดำเนินการรูปร่างSซึ่งเป็นตัวดำเนินการเชิงเส้นแบบสมมาตรในตัวเอง จากระนาบสัมผัสไปยังตัวมันเอง (โดยเฉพาะอย่างยิ่ง อนุพันธ์ของแผนที่เกาส์ )
สำหรับพื้นผิวที่มีเวกเตอร์สัมผัสXและเวกเตอร์ตั้งฉากNตัวดำเนินการรูปร่างสามารถแสดงได้อย่างกระชับในสัญกรณ์การรวมดัชนีดังนี้

(เปรียบเทียบกับการแสดงความโค้งอีกแบบหนึ่งสำหรับเส้นโค้งระนาบ)
สมการของ Weingartenให้ค่าของSในรูปของสัมประสิทธิ์ของรูปแบบพื้นฐานที่หนึ่งและ ที่สอง ดังนี้

ค่าความโค้งหลักคือค่าลักษณะเฉพาะของตัวดำเนินการรูปร่าง ทิศทางความโค้งหลักคือเวกเตอร์ลักษณะเฉพาะ ของตัวดำเนินการ รูปร่าง ค่าความโค้งเกาส์คือดีเทอร์มิแนนต์ ของตัวดำเนินการรูปร่าง และค่าความโค้งเฉลี่ยคือครึ่งหนึ่งของร่องรอย ของตัวดำเนิน การ รูปร่าง
ความโค้งของอวกาศ
จากการขยายความในประเด็นก่อนหน้านี้ พื้นที่ที่มีสามมิติขึ้นไปสามารถโค้งงอได้โดยเนื้อแท้ ความโค้งนั้นเป็นความโค้งโดยเนื้อแท้ในแง่ที่ว่ามันเป็นคุณสมบัติที่กำหนดขึ้น ณ ทุกจุดในพื้นที่นั้น ไม่ใช่คุณสมบัติที่กำหนดขึ้นโดยสัมพันธ์กับพื้นที่ที่ใหญ่กว่าซึ่งบรรจุอยู่ โดยทั่วไปแล้ว พื้นที่โค้งอาจถูกมองว่าฝังอยู่ในพื้นที่แวดล้อมที่ มีมิติสูงกว่าหรือไม่ ก็ได้ หากไม่เป็นเช่นนั้น ความโค้งของมันก็สามารถกำหนดได้เฉพาะโดยเนื้อแท้เท่านั้น
หลังจากการค้นพบนิยามที่แท้จริงของความโค้ง ซึ่งมีความเชื่อมโยงอย่างใกล้ชิดกับเรขาคณิตนอกยุคลิดนักคณิตศาสตร์และนักวิทยาศาสตร์จำนวนมากตั้งคำถามว่าพื้นที่ทางกายภาพทั่วไปอาจโค้งงอหรือไม่ แม้ว่าความสำเร็จของเรขาคณิตยุคลิดจนถึงขณะนั้นจะหมายความว่ารัศมีของความโค้งจะต้องมีขนาดใหญ่มากในทางดาราศาสตร์ ในทฤษฎีสัมพัทธภาพทั่วไปซึ่งอธิบายถึงแรงโน้มถ่วงและจักรวาลวิทยาแนวคิดนี้ได้รับการขยายความเล็กน้อยไปสู่ "ความโค้งของกาลอวกาศ " ในทฤษฎีสัมพัทธภาพ กาลอวกาศเป็นแมนิโฟลด์แบบเสมือนรีมันน์เมื่อกำหนดพิกัดเวลาแล้ว พื้นที่สามมิติที่สอดคล้องกับเวลาเฉพาะนั้นโดยทั่วไปจะเป็นแมนิโฟลด์แบบรีมันน์ที่โค้งงอ แต่เนื่องจากการเลือกพิกัดเวลาส่วนใหญ่เป็นไปโดยพลการ ความโค้งของกาลอวกาศที่อยู่เบื้องหลังจึงมีความสำคัญทางกายภาพ
แม้ว่าการอธิบายปริภูมิโค้งตามอำเภอใจจะซับซ้อนมาก แต่ความโค้งของปริภูมิที่เป็นเนื้อเดียวกันและสมมาตร ในระดับท้องถิ่น นั้นสามารถอธิบายได้ด้วยความโค้งแบบเกาส์เซียนเพียงค่าเดียว เช่นเดียวกับพื้นผิว ในทางคณิตศาสตร์แล้วนี่เป็นเงื่อนไขที่เข้มงวด แต่ก็สอดคล้องกับสมมติฐานทางฟิสิกส์ที่สมเหตุสมผล (ทุกจุดและทุกทิศทางไม่สามารถแยกแยะได้) ความโค้งที่เป็นบวกจะสอดคล้องกับค่าผกผันของกำลังสองของรัศมีความโค้ง ตัวอย่างเช่น ทรงกลมหรือไฮเปอร์สเฟียร์ตัวอย่างของปริภูมิโค้งที่เป็นลบคือเรขาคณิตไฮเปอร์โบลิก (ดูเพิ่มเติม: ความโค้งที่ไม่เป็นบวก ) ปริภูมิหรือปริภูมิเวลาที่มีความโค้งเป็นศูนย์เรียกว่าระนาบตัวอย่างเช่นปริภูมิยูคลิดเป็นตัวอย่างของปริภูมิราบ และปริภูมิมิงคอฟสกีเป็นตัวอย่างของปริภูมิเวลาราบ อย่างไรก็ตาม ยังมีตัวอย่างอื่นๆ ของรูปทรงเรขาคณิตราบในทั้งสองบริบททรงโดนัทหรือทรงกระบอกสามารถมีเมตริกราบได้ แต่แตกต่างกันในโทโพโลยีนอกจากนี้ โทโพโลยีอื่นๆ ก็เป็นไปได้สำหรับปริภูมิโค้งด้วย
การสรุปโดยทั่วไป
แนวคิดทางคณิตศาสตร์ของความโค้งยังถูกกำหนดไว้ในบริบททั่วไปมากขึ้นอีกด้วย[ 11 ]การสรุปทั่วไปเหล่านี้จำนวนมากเน้นไปที่แง่มุมต่างๆ ของความโค้งตามที่เข้าใจในมิติที่ต่ำกว่า
หนึ่งในแนวคิดทั่วไปดังกล่าวคือจลนศาสตร์ ความโค้งของเส้นโค้งสามารถพิจารณาได้ว่าเป็นปริมาณทางจลนศาสตร์ ซึ่งแสดงถึงแรงที่ผู้สังเกตการณ์บางคนรู้สึกเมื่อเคลื่อนที่ไปตามเส้นโค้ง ในทำนองเดียวกัน ความโค้งในมิติที่สูงกว่าสามารถมองได้ว่าเป็นแรงน้ำขึ้นน้ำลง ชนิดหนึ่ง (นี่เป็นวิธีคิดอย่างหนึ่งเกี่ยวกับความโค้งตามหน้าตัด ) แนวคิดทั่วไปของความโค้งนี้ขึ้นอยู่กับว่าอนุภาคทดสอบที่อยู่ใกล้เคียงกันจะแยกออกจากกันหรือมาบรรจบกันอย่างไรเมื่อพวกมันได้รับอนุญาตให้เคลื่อนที่ได้อย่างอิสระในอวกาศ ดูฟิลด์จาโคบี
การสรุปทั่วไปอีกประการหนึ่งของความโค้งมาจากการศึกษาการขนส่งแบบขนานบนพื้นผิว ตัวอย่างเช่น หากเวกเตอร์เคลื่อนที่ไปรอบวงบนพื้นผิวของทรงกลมโดยรักษาความขนานตลอดการเคลื่อนที่ ตำแหน่งสุดท้ายของเวกเตอร์อาจไม่เหมือนกับตำแหน่งเริ่มต้นของเวกเตอร์ ปรากฏการณ์นี้เรียกว่าโฮโลโนมี [ 12 ] การสรุปทั่วไปต่างๆ จับแนวคิดของความโค้งในรูปแบบนามธรรมในฐานะการวัดโฮโลโนมี ดูรูปแบบความโค้งแนวคิดที่เกี่ยวข้องอย่างใกล้ชิดของความโค้งมาจากทฤษฎีเกจในฟิสิกส์ ซึ่งความโค้งแสดงถึงสนาม และศักยภาพเวกเตอร์สำหรับสนามเป็นปริมาณที่โดยทั่วไปขึ้นอยู่กับเส้นทาง: มันอาจเปลี่ยนแปลงได้หากผู้สังเกตเคลื่อนที่ไปรอบวง
ความโค้งอีกสองแบบที่ถูกขยายความออกไปคือความโค้งสเกลาร์และความโค้งริชชีบนพื้นผิวโค้ง เช่น ทรงกลม พื้นที่ของวงกลมบนพื้นผิวจะแตกต่างจากพื้นที่ของวงกลมที่มีรัศมีเดียวกันในระนาบราบ ความแตกต่างนี้ (ในขอบเขตที่เหมาะสม) วัดได้ด้วยความโค้งสเกลาร์ ส่วนความแตกต่างของพื้นที่ของส่วนหนึ่งของวงกลมวัดได้ด้วยความโค้งริชชี ความโค้งสเกลาร์และความโค้งริชชีแต่ละแบบถูกนิยามในลักษณะเดียวกันในสามมิติและมิติที่สูงกว่า พวกมันมีความสำคัญอย่างยิ่งในทฤษฎีสัมพัทธภาพ ซึ่งทั้งสองปรากฏอยู่ด้านหนึ่งของสมการสนามของไอน์สไตน์ที่แสดงถึงเรขาคณิตของกาลอวกาศ (อีกด้านหนึ่งแสดงถึงการมีอยู่ของสสารและพลังงาน) การขยายความโค้งเหล่านี้เป็นพื้นฐานของแนวคิดที่ว่า ความโค้งสามารถเป็นคุณสมบัติของการวัดได้ ดูความโค้งของการวัด
การขยายความโค้งอีกแบบหนึ่งอาศัยความสามารถในการเปรียบเทียบปริภูมิโค้งกับปริภูมิอื่นที่มี ความโค้ง คงที่บ่อยครั้งที่ทำเช่นนี้โดยใช้รูปสามเหลี่ยมในปริภูมิ แนวคิดของรูปสามเหลี่ยมมีความหมายในปริภูมิเมตริกและสิ่งนี้ทำให้เกิดปริภูมิCAT( k )ขึ้น
ดูเพิ่มเติม
- รูปแบบความโค้งสำหรับแนวคิดที่เหมาะสมของความโค้งสำหรับกลุ่มเวกเตอร์และกลุ่มหลักที่มีการเชื่อมต่อ
- ความโค้งของการวัดสำหรับแนวคิดเรื่องความโค้งในทฤษฎีการวัด
- ความโค้งของพื้นผิวพาราเมตริก
- ความโค้งของแมนิโฟลด์แบบรีมันน์ สำหรับการขยายความโค้งของเกาส์ไปยัง แมนิโฟลด์แบบรีมันน์มิติสูงกว่า
- เวกเตอร์ความโค้งและความโค้งจีโอเดสิกสำหรับแนวคิดที่เหมาะสมเกี่ยวกับความโค้งของเส้นโค้งในแมนิโฟลด์แบบรีมันน์ ไม่ว่าจะมีมิติใดก็ตาม
- ระดับความโค้ง
- เรขาคณิตเชิงอนุพันธ์ของเส้นโค้งสำหรับการวิเคราะห์เส้นโค้งที่ฝังอยู่ในปริภูมิยุคลิดที่มีมิติใดๆ อย่างครบถ้วน
- ไดออปเตอร์หน่วยวัดความโค้งที่ใช้ในทางด้านทัศนศาสตร์
- อีโวลูต (Evolute ) คือตำแหน่งของจุดศูนย์กลางความโค้งของเส้นโค้งที่กำหนด
- ทฤษฎีบทพื้นฐานของเส้นโค้ง
- ทฤษฎีบทเกาส์-บอนเนต์สำหรับการประยุกต์ใช้ความโค้งขั้นพื้นฐาน
- แผนที่เกาส์สำหรับคุณสมบัติทางเรขาคณิตเพิ่มเติมของความโค้งเกาส์
- หลักการของเกาส์เรื่องข้อจำกัดน้อยที่สุดซึ่งเป็นการแสดงออกของหลักการของการกระทำน้อยที่สุด
- ความโค้งเฉลี่ยณ จุดหนึ่งบนพื้นผิว
- รัศมีโค้งทางรถไฟขั้นต่ำ
- รัศมีของความโค้ง
- รูปแบบพื้นฐานที่สองสำหรับความโค้งภายนอกของพื้นผิวไฮเปอร์เซอร์เฟซโดยทั่วไป
- ความคดเคี้ยว
- การบิดของเส้นโค้ง
หมายเหตุ
- ^ แดน มาร์กาลิท , "ประวัติศาสตร์ของความโค้ง" , มหาวิทยาลัยจอร์เจีย : มหาวิทยาลัยวิลลาโนวา : robert.jantzen , สืบค้นเมื่อ 14 ตุลาคม 2025
- ^ Clagett, Marshall (1968), Nicole Oresme and the Medieval Geometry of Qualities and Motions , Madison, WI: University of Wisconsin Press, ISBN 978-0-299-04880-8
- ^ Serrano, Isabel M.; Suceavă, Bogdan D. (2015), "ปริศนายุคกลาง: แนวคิด Curvitas ของ Nicole Oresme", Notices of the AMS , 62 (9): 1030– 1034, doi : 10.1090/noti1275
- ^ Borovik, Alexandre ; Katz, Mikhail G. (2011), "ใครเป็นคนเล่าเรื่อง Cauchy–Weierstrass ให้คุณฟัง? ประวัติศาสตร์คู่ขนานของแคลคูลัสที่เข้มงวด", Foundations of Science , 17 (3): 245– 276, arXiv : 1108.2885 , doi : 10.1007/s10699-011-9235-x
- ^ Pressley, Andrew (2001), เรขาคณิตเชิงอนุพันธ์เบื้องต้น , ลอนดอน: Springer, หน้า 29, ISBN 978-1-85233-152-8
- ^ไคลน์ 1998 , หน้า 458
- ^ Goldman, Ron (2005), "สูตรความโค้งสำหรับเส้นโค้งและพื้นผิวโดยปริยาย", Computer Aided Geometric Design , 22 (7): 632– 658, CiteSeerX 10.1.1.413.3008 , doi : 10.1016/j.cagd.2005.06.005
- ^ Farin, Gerald (พ.ย. 2016), "หวีความโค้งและกราฟความโค้ง", การออกแบบโดยใช้คอมพิวเตอร์ช่วย , 80 : 6– 8, doi : 10.1016/j.cad.2016.08.003
- ^สามารถดูหลักฐานการพิสูจน์ได้ในบทความเกี่ยวกับความโค้งที่ Wolfram MathWorld
- ^พื้นผิวที่สามารถคลี่ออกได้ , Mathworld. (สืบค้นเมื่อ 11 กุมภาพันธ์ 2021)
- ^ Kobayashi, Shōshichi ; Nomizu, Katsumi (1963), "2–3", พื้นฐานของเรขาคณิตเชิงอนุพันธ์นิวยอร์ก: Interscience, ISBN 978-0-470-49647-3
{{citation}}: ISBN / Date incompatibility (help) - ^ Henderson, David W. ; Taimin̦a, Daina (2005), Experiencing Geometry: Euclidean and Non-Euclidean with History (ฉบับที่ 3), Upper Saddle River, NJ: Pearson Prentice Hall, หน้า 98–99 , doi : 10.3792/euclid/9781429799850 , ISBN 978-0-13-143748-7
ลิงก์ภายนอก
- หนังสือ The Feynman Lectures on Physics เล่มที่ 2 บทที่ 42: พื้นที่โค้ง
- ประวัติศาสตร์ของความโค้ง
- ความโค้ง ภายในและภายนอกที่ MathPages
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ความโค้ง
ในทาง คณิตศาสตร์ ความโค้ง คือแนวคิดที่เกี่ยวข้องกันอย่างมากใน เรขาคณิต ซึ่งใช้วัดปริมาณที่เส้น โค้ง เบี่ยงเบนจาก เส้นตรง หรือ พื้นผิว เบี่ยงเบนจาก ระนาบ...
ประวัติศาสตร์
ประวัติศาสตร์ของความโค้งเริ่มต้นจาก ความแตกต่างพื้นฐานระหว่างเส้นตรงและเส้นโค้งของ ชาวกรีกโบราณ โดยแนวคิดนี้ได้รับการพัฒนาต่อมาโดยบุคคลสำคัญอย่าง อริสโตเติล และ อพอลโลเนียส การพัฒนาแคลคูลัสในศตวรรษที่ 17 โดยเฉพาะอย่างยิ่งโดยนิวตันและไลบ์นิซ...
เส้นโค้ง
โดยสัญชาตญาณแล้ว ความโค้งอธิบายถึงการเปลี่ยนแปลงทิศทางของเส้นโค้งในแต่ละส่วนเมื่อเคลื่อนที่ไปตามระยะทางสั้นๆ ทิศทางของเส้นโค้ง ณ จุดใดๆ P จะถูกอธิบายด้วยเวกเตอร์สัมผัสหน่วย T ส่วนหนึ่งของเส้นโค้งเรียกว่าส่วนโค้ง และความยาวตามเส้นโค้งเรียก ว่าความยาว ส่วน โค้ง...
เวกเตอร์ความโค้ง
เวกเตอร์ความโค้ง ซึ่งแทนด้วยตัวอักษร K ตัวใหญ่ คืออนุพันธ์ของเวกเตอร์สัมผัสหน่วย T เทียบกับความยาวส่วนโค้ง s :