อ่าน 24 นาที
ประวัติศาสตร์ของหุ่นยนต์
ประวัติศาสตร์ ของหุ่นยนต์ มีจุดเริ่มต้นใน โลกยุคโบราณ ในช่วง การปฏิวัติอุตสาหกรรม มนุษย์ได้พัฒนา ความสามารถ ด้านวิศวกรรมโครงสร้าง เพื่อควบคุม ไฟฟ้า...
ประวัติศาสตร์ของหุ่นยนต์

ประวัติศาสตร์ของหุ่นยนต์มีจุดเริ่มต้นในโลกยุคโบราณในช่วงการปฏิวัติอุตสาหกรรมมนุษย์ได้พัฒนา ความสามารถ ด้านวิศวกรรมโครงสร้างเพื่อควบคุมไฟฟ้าทำให้เครื่องจักรสามารถทำงานได้ด้วยมอเตอร์ ขนาดเล็ก ในช่วงต้นศตวรรษที่ 20 แนวคิดเกี่ยวกับ หุ่นยนต์ ที่มีรูปร่างคล้ายมนุษย์จึงได้รับการพัฒนาขึ้น
การใช้งานหุ่นยนต์สมัยใหม่ครั้งแรกเกิดขึ้นในโรงงานในรูปแบบของหุ่นยนต์อุตสาหกรรมหุ่นยนต์อุตสาหกรรมเหล่านี้เป็นเครื่องจักรที่ติดตั้งอยู่กับที่ สามารถ ทำงานด้าน การผลิตได้ ซึ่งช่วยลด การ ใช้แรงงาน มนุษย์ ในการผลิตนับตั้งแต่ช่วงปี 2000 เป็นต้นมา มีการสร้าง หุ่นยนต์อุตสาหกรรมที่ตั้งโปรแกรม ด้วย ระบบดิจิทัล และ ใช้ปัญญาประดิษฐ์ ขึ้นมา
ตำนานยุคแรก

แนวคิดเกี่ยวกับคนรับใช้และสหายเทียมมีมาอย่างน้อยตั้งแต่ตำนานโบราณของแคดมัสซึ่งกล่าวกันว่าได้หว่านฟันมังกรที่กลายเป็นทหาร และพิกมาเลียนซึ่งรูปปั้นกาลาเทียมีชีวิตขึ้นมา ตำนานโบราณหลายเรื่องรวมถึงมนุษย์เทียม เช่น สาวใช้จักรกลที่พูดได้ ( ภาษากรีกโบราณ : Κουραι Χρυσεαι (Kourai Khryseai); "สาวใช้ทองคำ" [ 1 ] ) ที่สร้างโดยเทพเจ้ากรีกเฮเฟสตัส ( วัลแคนสำหรับชาวโรมัน) จากทองคำ[ 2 ]
นักวิชาการพุทธศาสนาDaoxuan (ค.ศ. 596-667) บรรยายถึงหุ่นยนต์รูปร่างมนุษย์ที่ทำจากโลหะซึ่งท่องบทสวดศักดิ์สิทธิ์ในอารามที่มีนาฬิกาอันวิเศษ หุ่นยนต์ "ที่ทำจากโลหะมีค่า" เหล่านั้นร่ำไห้เมื่อพระพุทธเจ้าศากยมุนีปรินิพพาน[ 3 ]หุ่นยนต์รูปร่างมนุษย์ยังปรากฏอยู่ในมหากาพย์กษัตริย์เกสารวีรบุรุษทางวัฒนธรรมของเอเชียกลาง อีกด้วย [ 4 ]
ตำนานจีนโบราณเกี่ยวกับช่างไม้ในตำนานอย่างลู่ปานและนักปรัชญาโมจื่อได้บรรยายถึงการเลียนแบบสัตว์และปีศาจด้วยกลไก[ 5 ]ความหมายของหุ่นยนต์มนุษย์ได้รับการกล่าวถึงในเหลียจื่อ (คริสต์ศตวรรษที่ 4) ซึ่งเป็นการรวบรวม ตำรา เต๋าที่ต่อมากลายเป็นตำราคลาสสิก ในบทที่ 5 พระเจ้ามู่แห่งโจวเสด็จประพาสทางตะวันตก และเมื่อทรงถามช่างฝีมืออาจารย์เหยียนซือว่า "ท่านทำอะไรได้บ้าง?" ราชสำนักก็ได้เห็นหุ่นยนต์มนุษย์ หุ่นยนต์นั้นแยกไม่ออกจากมนุษย์และแสดงกลต่างๆ ให้กับพระราชาและข้าราชบริพาร แต่พระราชาทรงพิโรธเมื่อหุ่นยนต์เริ่มเกี้ยวพาราสีกับเหล่าสตรีในราชสำนัก และทรงขู่ประหารหุ่นยนต์นั้น ดังนั้นช่างฝีมือจึงผ่าหุ่นยนต์ออกและเผยให้เห็นกลไกภายในของมนุษย์เทียม พระราชาทรงทึ่งและทรงทดลองกับความสัมพันธ์เชิงหน้าที่ของหุ่นยนต์โดยการถอดส่วนประกอบต่างๆ ที่คล้ายอวัยวะ พระราชาทรงประหลาดใจว่า "เป็นไปได้หรือไม่ที่ทักษะของมนุษย์จะบรรลุผลได้มากเท่ากับผู้สร้าง?" และยึดเครื่องจักรอัตโนมัติ[ 6 ]เรื่องราวที่คล้ายกันนี้สามารถพบได้ในชาตกะ พุทธศาสนาของอินเดียในยุคใกล้เคียงกัน แต่ในที่นี้ความซับซ้อนของเครื่องจักรอัตโนมัติไม่ตรงกับของอาจารย์เหยียน[ 4 ]ก่อนการเข้ามาของพุทธศาสนาในยุคคริสต์ศักราชนักปรัชญาจีนไม่ได้พิจารณาความแตกต่างระหว่างรูปลักษณ์และความเป็นจริงอย่างจริงจัง เหลียจื่อโต้แย้งปรัชญาพุทธศาสนาและเปรียบเทียบพลังสร้างสรรค์ของมนุษย์กับพลังของพระผู้สร้าง[ 7 ]

โลกปันนัตติของอินเดียซึ่งเป็นชุดเรื่องราวและตำนานที่ผลิตขึ้นในศตวรรษที่ 11 หรือ 12 [ 8 ]เล่าเรื่องราวเกี่ยวกับกองทัพทหารอัตโนมัติ ( bhuta vahana yantaหรือ "เครื่องจักรเคลื่อนไหววิญญาณ") ที่ถูกสร้างขึ้นเพื่อปกป้องพระธาตุของพระพุทธเจ้าในเจดีย์ลับ แผนการสร้างหุ่นยนต์รูปร่างมนุษย์ดังกล่าวถูกขโมยมาจากอาณาจักรโรมัน ซึ่งเป็นคำทั่วไปสำหรับวัฒนธรรมกรีก-โรมัน-ไบแซนไทน์ตามโลกปันนั ตติ ชาวยาวานา ("ผู้พูดภาษากรีก") ใช้หุ่นยนต์เหล่านี้ในการค้าขายและทำการเกษตร แต่ยังใช้จับกุมและประหารชีวิตอาชญากรด้วย ผู้ผลิตหุ่นยนต์โรมันที่ออกจากอาณาจักรถูกหุ่นยนต์เหล่านี้ไล่ล่าและฆ่า ตามโลกปันนัตติจักรพรรดิอโศกได้ยินเรื่องราวของเจดีย์ลับและออกเดินทางไปค้นหา หลังจากการต่อสู้ระหว่างหุ่นยนต์นักรบที่ดุร้าย อโศกได้พบกับวิศวกรผู้มีอายุยืนยาวซึ่งเป็นผู้สร้างหุ่นยนต์เหล่านั้น และได้รับการสาธิตวิธีการถอดประกอบและควบคุมพวกมัน ดังนั้นจักรพรรดิอโศกจึงสามารถบัญชาการกองทัพหุ่นยนต์นักรบขนาดใหญ่ได้ นิทานอินเดียเรื่องนี้สะท้อนให้เห็นถึงความกลัวที่จะสูญเสียการควบคุมสิ่งมีชีวิตเทียม ซึ่งได้แสดงออกในเทพนิยายกรีกเกี่ยวกับกองทัพฟันมังกรเช่น กัน [ 9 ]
ได้รับแรงบันดาลใจจากตำนานคริสเตียน ของยุโรป ชาวยุโรปในยุคกลางได้ประดิษฐ์หัวทองเหลืองที่สามารถตอบคำถามที่ถามพวกเขาได้อัลเบอร์ตัส แม็กนัสเชื่อกันว่าได้สร้างหุ่นยนต์แอนดรอยด์ทั้งตัวที่สามารถทำงานบ้านบางอย่างได้ แต่ถูกทำลายโดยโทมัส อควินัส ศิษย์ของอัลเบอร์ตัส เนื่องจากรบกวนความคิดของเขา[ 10 ]ตำนานที่มีชื่อเสียงที่สุดเกี่ยวข้องกับหัวทองสัมฤทธิ์ที่ประดิษฐ์โดยโรเจอร์ เบคอนซึ่งถูกทำลายหรือทิ้งไปหลังจากที่เขาพลาดช่วงเวลาในการใช้งาน[ 10 ]หุ่นยนต์อัตโนมัติที่มีลักษณะคล้ายมนุษย์หรือสัตว์เป็นที่นิยมในโลกจินตนาการของวรรณกรรมยุคกลาง[ 11 ] [ 12 ]
ออโตมาตา
ในศตวรรษที่ 4 ก่อนคริสต์ศักราช นักคณิตศาสตร์Archytasแห่ง Tarentum ได้ตั้งสมมติฐานเกี่ยวกับนกกลไกที่เขาเรียกว่า "นกพิราบ" ซึ่งขับเคลื่อนด้วยไอน้ำ [ 13 ] อริสโตเติลได้อ้างอิงถึงการอ้างอิงก่อนหน้านี้ในมหากาพย์อีเลียดของโฮเมอร์ และ คาดการณ์ไว้ในหนังสือการเมือง ของเขา (ประมาณ 322 ปีก่อนคริสต์ศักราช เล่ม 1 ตอนที่ 4) ว่าหุ่นยนต์อัตโนมัติอาจนำมาซึ่งความเท่าเทียมกันของมนุษย์ได้ในอนาคต โดยทำให้การยกเลิกการเป็นทาส เป็นไป ได้
มีเพียงเงื่อนไขเดียวเท่านั้นที่เราสามารถจินตนาการได้ว่าผู้จัดการไม่จำเป็นต้องมีผู้ใต้บังคับบัญชา และนายไม่จำเป็นต้องมีทาส เงื่อนไขนั้นคือ เครื่องมือแต่ละชิ้นสามารถทำงานได้ด้วยตนเอง ตามคำสั่งหรือด้วยการคาดการณ์อย่างชาญฉลาด เช่นเดียวกับรูปปั้นของเดดาลัสหรือขาตั้งสามขาที่เฮเฟสตัสสร้างขึ้น ซึ่งโฮเมอร์เล่าว่า "พวกมันเคลื่อนไหวได้เองและเข้าไปในที่ประชุมของเทพเจ้าบนโอลิมปัส" ราวกับว่ากระสวยทอผ้าได้เอง และปิ๊กดีดพิณเล่นได้เอง

เมื่อชาวกรีกปกครองอียิปต์ วิศวกรผู้สร้างหุ่นยนต์อัตโนมัติได้เข้ามาตั้งรกรากในเมืองอเล็กซานเดรียโดยเริ่มจากซีเตซิเบียส (285-222 ปีก่อนคริสตกาล) ผู้รอบรู้ วิศวกรชาวอเล็กซานเดรียได้ทิ้งตำราที่บรรยายรายละเอียดเกี่ยวกับหุ่นยนต์อัตโนมัติที่ใช้งานได้จริงซึ่งขับเคลื่อนด้วยระบบไฮดรอลิกหรือไอน้ำซีเตซิเบียสสร้างหุ่นยนต์อัตโนมัติที่มีลักษณะคล้ายมนุษย์ ซึ่งมักใช้ในพิธีกรรมทางศาสนาและการบูชาเทพเจ้าฮีโรแห่งอเล็กซานเดรีย (10-70 คริสตกาล) หนึ่งในวิศวกรชาวอเล็กซานเดรียผู้ยิ่งใหญ่คนสุดท้าย ได้สร้างโรงละครหุ่นกระบอกอัตโนมัติ ซึ่งหุ่นและฉากบนเวทีเคลื่อนไหวด้วยกลไก เขาได้บรรยายถึงการสร้างหุ่นยนต์อัตโนมัติดังกล่าวในตำราเกี่ยวกับระบบนิวแมติกส์ของ เขา [ 14 ]วิศวกรชาวอเล็กซานเดรียสร้างหุ่นยนต์อัตโนมัติเพื่อแสดงความเคารพต่อการควบคุมธรรมชาติของมนุษย์ และเป็นเครื่องมือสำหรับนักบวช แต่ยังเริ่มต้นประเพณีที่สร้างหุ่นยนต์อัตโนมัติให้กับทุกคนที่ร่ำรวย และส่วนใหญ่เพื่อความบันเทิงของคนรวย[ 15 ]
ประเพณีการผลิตหุ่นยนต์อัตโนมัติยังคงดำเนินต่อไปในโลกกรีกจนถึงยุคกลาง ในระหว่างการเยือนคอนสแตนติโนเปิลในปี 949 ทูตลิวท์ปรานด์แห่งเครโมนาได้บรรยายถึงหุ่นยนต์อัตโนมัติในพระราชวังของจักรพรรดิธีโอฟิโลสซึ่งรวมถึง...
“สิงโตที่ทำจากทองสัมฤทธิ์หรือไม้ที่หุ้มด้วยทองคำ ซึ่งฟาดหางลงบนพื้นและคำรามด้วยปากที่อ้าและลิ้นที่สั่นไหว” “ต้นไม้ที่ทำจากทองสัมฤทธิ์ปิดทอง กิ่งก้านของมันเต็มไปด้วยนกที่ทำจากทองสัมฤทธิ์ปิดทองเช่นกัน และนกเหล่านี้ส่งเสียงร้องตามสายพันธุ์ของมัน” และ “บัลลังก์ของจักรพรรดิ” ซึ่ง “สร้างขึ้นในลักษณะที่แยบยลจนในชั่วขณะหนึ่งมันอยู่บนพื้น ในขณะที่อีกชั่วขณะหนึ่งมันยกสูงขึ้นและสามารถมองเห็นได้ในอากาศ” [ 16 ]
ออโตมาตะที่คล้ายกันในห้องบัลลังก์ (นกร้อง เสียงคำราม และสิงโตเคลื่อนไหว) ได้รับการบรรยายโดยจักรพรรดิไบแซนไทน์ร่วมสมัยของหลุยส์ปรานด์คอนสแตนติน พอร์ฟีโรเจนิทัสในหนังสือของเขาΠερὶ τῆς Βασιлείου Τάξεως

ในประเทศจีน จักรกลจักรวาล ซึ่งเป็นหอนาฬิกาสูง 10 เมตร (33 ฟุต) ที่สร้างโดยซูซงในเมืองไคเฟิง ประเทศจีนในปี ค.ศ. 1088 มีหุ่น กลไก ที่ตีบอกเวลา ตีฆ้องหรือระฆัง รวมถึงอุปกรณ์อื่นๆ[ 17 ]ความสำเร็จด้านระบบอัตโนมัติยังคงดำเนินต่อไปในสมัย ราชวงศ์ ถังไดเฟิงหม่าสร้างคนรับใช้แต่งตัวอัตโนมัติให้กับพระราชินี[ 18 ]อิงเหวินเหลียงสร้างหุ่นผู้ชายอัตโนมัติที่กล่าวคำอวยพรในงานเลี้ยงและหุ่นผู้หญิงไม้อัตโนมัติที่เล่นเซิงในบรรดาหุ่นอัตโนมัติที่ได้รับการบันทึกไว้อย่างดีที่สุดในจีนโบราณคือหุ่นของฮั่นจือเล่อชาวญี่ปุ่นที่ย้ายมาอยู่จีนในช่วงต้นศตวรรษที่ 9 [ 19 ]
สังคมหลังยุคคลาสสิก เช่นไบแซนไทน์และอาหรับยังคงสร้างหุ่นยนต์อัตโนมัติต่อไป ไบแซนไทน์ได้รับมรดกความรู้เกี่ยวกับหุ่นยนต์อัตโนมัติมาจากชาวอเล็กซานเดรียและพัฒนาต่อยอดเพื่อสร้างนาฬิกาน้ำที่มีกลไกเฟือง เช่นที่Procopius อธิบายไว้ เมื่อราวปี 510 ในโลกอาหรับยุคกลางมีการพัฒนาที่สำคัญยิ่งขึ้นในการสร้างหุ่นยนต์อัตโนมัติHarun al-Rashidสร้างนาฬิกาน้ำที่มีแม่แรงไฮดรอลิกที่ ซับซ้อน และรูปปั้นมนุษย์ที่เคลื่อนไหวได้ นาฬิกาเรือนหนึ่งถูกมอบให้แก่ชาร์เลมาญกษัตริย์แห่งแฟรงก์ ในปี 807 [ 20 ]วิศวกรชาวอาหรับ เช่นBanu MusaและAl-Jazariได้ตีพิมพ์ตำราเกี่ยวกับไฮดรอลิกและพัฒนาศิลปะการสร้างนาฬิกาน้ำให้ก้าวหน้ายิ่งขึ้น Al-Jazari สร้างนกยูงเคลื่อนไหวอัตโนมัติที่ขับเคลื่อนด้วยพลังน้ำ[ 21 ]เขาประดิษฐ์กังหานน้ำที่มีลูกเบี้ยวบนแกนหมุนเพื่อใช้ในการทำงานของหุ่นยนต์อัตโนมัติ[ 22 ]หนึ่งในหุ่นยนต์รูปร่างมนุษย์ ของอัล-จาซารี คือพนักงานเสิร์ฟที่สามารถเสิร์ฟน้ำ ชา หรือเครื่องดื่มได้ เครื่องดื่มจะถูกเก็บไว้ในถังที่มีอ่างเก็บน้ำ ซึ่งเครื่องดื่มจะหยดลงในถัง และหลังจากเจ็ดนาทีก็จะหยดลงในถ้วย จากนั้นพนักงานเสิร์ฟก็จะปรากฏตัวออกมาจากประตูอัตโนมัติเพื่อเสิร์ฟเครื่องดื่ม[ 23 ]อัล-จาซารีได้ประดิษฐ์หุ่นยนต์ ล้างมือ ที่มีกลไกการกดชักโครกซึ่งปัจจุบันใช้ในห้องน้ำแบบชักโครก สมัยใหม่ หุ่นยนต์ นี้มีรูปร่างมนุษย์ หญิง ยืนอยู่ข้างอ่างที่เต็มไปด้วยน้ำ เมื่อผู้ใช้ดึงคันโยก น้ำจะไหลออกและหุ่นยนต์หญิงจะเติมน้ำลงในอ่างอีกครั้ง[ 24 ]นอกจากนี้ เขายังสร้างวงดนตรีหุ่นยนต์อีกด้วย[ 25 ]ตามที่มาร์ค รอสไฮม์กล่าวไว้ หุ่นยนต์ของชาวอาหรับนั้นแตกต่างจากการออกแบบของชาวกรีกตรงที่ใช้ภาพลวงตาที่น่าทึ่งและควบคุมการรับรู้ ของมนุษย์ เพื่อการใช้งานจริง[ 26 ]
เฟืองแบบแบ่งส่วนที่อธิบายไว้ในหนังสือความรู้เกี่ยวกับอุปกรณ์กลไกอันชาญฉลาดซึ่งตีพิมพ์โดยอัล-จาซารีไม่นานก่อนที่เขาจะเสียชีวิตในปี ค.ศ. 1206 ปรากฏขึ้น 100 ปีต่อมาในนาฬิกา ที่ทันสมัยที่สุดของยุโรป อัล-จาซารียังได้ตีพิมพ์คำแนะนำเกี่ยวกับการสร้างหุ่นยนต์อัตโนมัติรูปมนุษย์อีกด้วย[ 27 ]นาฬิกาน้ำเรือนแรกที่จำลองมาจากแบบอาหรับถูกสร้างขึ้นในยุโรปราวปี ค.ศ. 1000 ซึ่งอาจขึ้นอยู่กับข้อมูลที่ส่งต่อกันระหว่างการติดต่อระหว่างชาวมุสลิมและชาวคริสต์ในซิซิลีและสเปน ในบรรดานาฬิกาน้ำของยุโรปที่บันทึกไว้เป็นครั้งแรกคือนาฬิกาของเกอร์เบิร์ตแห่งออริลแล็กซึ่งสร้างขึ้นในปี ค.ศ. 985 [ 28 ]ผลงานของฮีโรเกี่ยวกับหุ่นยนต์อัตโนมัติได้รับการแปลเป็นภาษาละตินในช่วงยุคฟื้นฟูศิลปวิทยาการในศตวรรษที่ 12ศิลปินและวิศวกรในต้นศตวรรษที่ 13 วิลลาร์ด เดอ ฮอนเนคอร์ท ได้ร่างแผนสำหรับหุ่นยนต์อัตโนมัติหลายตัว ในช่วงปลายศตวรรษที่ 13 โรเบิร์ตที่ 2 เคานต์แห่งอาร์ตัวส์ได้สร้างสวนพักผ่อนหย่อนใจที่ปราสาทของเขาที่เฮสดินซึ่งประกอบด้วยหุ่นยนต์หลายตัว ทั้งหุ่นยนต์รูปร่างมนุษย์และหุ่นยนต์รูปร่างสัตว์[ 29 ]เครื่องตีระฆังอัตโนมัติที่เรียกว่าjacquemartได้รับความนิยมในยุโรปในศตวรรษที่ 14 ควบคู่ไปกับนาฬิกาเชิงกล[ 28 ]

หนึ่งในระบบอัตโนมัติที่ตรวจสอบได้เป็นครั้งแรกคือหุ่นยนต์มนุษย์ที่วาดโดยเลโอนาร์โด ดา วินชี (1452–1519) ในช่วงราวปี 1495 สมุดบันทึกของเลโอนาร์โดที่ถูกค้นพบอีกครั้งในช่วงทศวรรษ 1950 มีภาพวาดโดยละเอียดของอัศวินจักร กล ในชุดเกราะที่สามารถนั่ง โบกแขน และขยับศีรษะและขากรรไกรได้[ 30 ]ในช่วงกลางทศวรรษ 1400 โยฮันเนส มุลเลอร์ ฟอน เคอนิกส์เบิร์กกล่าวกันว่าได้สร้างนกอินทรีและแมลงวันอัตโนมัติที่ทำจากเหล็ก ทั้งสองสามารถบินได้ตามตำนาน แต่คำอธิบายเหล่านี้ถือว่าเป็นเพียงบทกวีเสียส่วนใหญ่จอห์น ดียังเป็นที่รู้จักในฐานะผู้สร้างด้วงไม้ที่สามารถบินได้[ 31 ]


เรเน่ เดส์การ์ตนักคิดในศตวรรษที่ 17 เชื่อว่าสัตว์และมนุษย์เป็นเครื่องจักรชีวภาพ ในการเดินทางไปนอร์เวย์ครั้งสุดท้าย เขาได้นำตุ๊กตาจักรกลที่มีลักษณะเหมือนฟรานซีน ลูกสาวที่เสียชีวิตของเขาไปด้วย[ 32 ]ในศตวรรษที่ 18 ฌาคส์ เดอ โวคานซง ช่างทำของเล่นฝีมือเยี่ยม ได้ สร้างเป็ดอัตโนมัติที่มีชิ้นส่วนเคลื่อนไหวหลายร้อยชิ้นให้กับพระเจ้าหลุยส์ที่ 15ซึ่งสามารถกินและดื่มได้ ต่อมาโวคานซงได้สร้างหุ่นยนต์อัตโนมัติที่มีรูปร่างคล้ายมนุษย์ เช่น มือกลองและนักเป่าขลุ่ย ซึ่งมีลักษณะทางกายวิภาคคล้ายคลึงกับมนุษย์จริง[ 33 ]ผลงานของโวคานซงเป็นแรงบันดาลใจให้ช่างทำนาฬิกา ในยุโรป ผลิตหุ่นยนต์อัตโนมัติ และการสะสมอุปกรณ์กลไกที่ซับซ้อนเพื่อความบันเทิงก็กลายเป็นแฟชั่นในหมู่ชนชั้นสูงของยุโรป[ 32 ]ในปี ค.ศ. 1747 Julien Offray de La Mettrieได้ตีพิมพ์L'homme machine ( มนุษย์เป็นเครื่องจักร ) โดยไม่เปิดเผยชื่อผู้เขียน ซึ่งเขาเรียก Vaucanson ว่าเป็น " โพรมีธีอุส คนใหม่ " และครุ่นคิดว่า "ร่างกายมนุษย์เป็นนาฬิกา นาฬิกาขนาดใหญ่ที่สร้างขึ้นด้วยทักษะและความเฉลียวฉลาดเช่นนี้" [ 34 ]
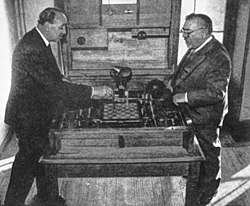
ในช่วงทศวรรษ 1770 ปิแอร์ ฌาเกต์-โดรซ์ ชาวสวิส ได้สร้างหุ่นยนต์เคลื่อนไหวที่ดูเหมือนเด็ก ซึ่งทำให้แมรี เชลลีย์ ประทับใจมาก และต่อมาเธอก็ได้เขียนนวนิยายเรื่องแฟรงเกนสไตน์ หรือ โพรมีธีอุสสมัยใหม่ ในปี 1818 ความพยายามขั้นสูงสุดในการสร้างระบบอัตโนมัติคือเดอะเทิร์กโดยวูล์ฟกัง ฟอน เคมเพเลนเครื่องจักรที่ดูเหมือนจะซับซ้อนที่สามารถเล่นหมากรุกกับคู่ต่อสู้ที่เป็นมนุษย์ได้ และได้เดินทางไปทั่วยุโรป เมื่อเครื่องจักรนี้ถูกนำไปยังโลกใหม่ มันกระตุ้นให้เอ็ดการ์ อัลลัน โพเขียนบทความ ซึ่งเขาได้สรุปว่า เป็นไปไม่ได้ที่เครื่องจักรกลจะใช้เหตุผลหรือคิดได้[ 32 ]อย่างไรก็ตาม ต่อมาได้มีการเปิดเผยว่า เดอะ เมคานิคอล เทิร์ก เป็นเรื่องหลอกลวงที่ซับซ้อน เครื่องจักรนี้ซ่อนมนุษย์ไว้ภายใน ซึ่งเป็นผู้ควบคุมมันจากภายใน
ในศตวรรษที่ 19 ช่างฝีมือชาวญี่ปุ่นฮิซาชิเกะ ทานากะซึ่งเป็นที่รู้จักในนาม "เอดิสันแห่งญี่ปุ่น" ได้สร้างของเล่นเชิงกลที่ซับซ้อนมากมาย ซึ่งบางชิ้นสามารถเสิร์ฟชา ยิงลูกศรจากซองธนู หรือแม้กระทั่งวาด อักษร คันจิ ของญี่ปุ่น ได้ หนังสือสำคัญKarakuri Zui ( เครื่องจักรประกอบภาพ ) ได้รับการตีพิมพ์ในปี 1796 [ 35 ]ในปี 1898 นิโคลา เทสลาได้สาธิต "เทเลออโตมาตอน" ซึ่งเป็นต้นแบบเรือควบคุมระยะไกลที่เมดิสันสแควร์การ์เดนโดยกล่าวว่าเป็น "ออโตมาตอนซึ่งหากปล่อยไว้ตามลำพัง จะกระทำการราวกับมีเหตุผลและปราศจากการควบคุมจากภายนอก" เขาปกป้องสิ่งประดิษฐ์ของเขาจากนักข่าวที่วิพากษ์วิจารณ์ โดยโต้แย้งว่ามันไม่ใช่ "ตอร์ปิโดไร้สาย" แต่เป็น "เครื่องจักรประเภทแรกในเผ่าพันธุ์มนุษย์เชิงกล (คำว่า 'หุ่นยนต์' จะยังไม่ถูกบัญญัติขึ้นจนกระทั่งปี 1920 โดยคาเรล ชาเป็ก ) [ 36 ]ซึ่งจะทำงานหนักแทนมนุษย์" [ 37 ]
ประวัติศาสตร์สมัยใหม่


ทศวรรษที่ 1900
ตั้งแต่ปี ค.ศ. 1900 L. Frank Baumได้นำเทคโนโลยีร่วมสมัยมาใช้ในหนังสือสำหรับเด็กในชุด Oz ในThe Wonderful Wizard of Oz (ค.ศ. 1900) Baum เล่าเรื่องราวของ มนุษย์ตัดไม้ ไซบอร์กTin Woodmanซึ่งเป็นมนุษย์ที่แขนขา หัว และลำตัวถูกแทนที่ด้วยช่างตีเหล็กหลังจากที่ขวานอันชั่วร้ายของเขาตัดขาดพวกเขา ในOzma of Oz (ค.ศ. 1907) Baum บรรยายถึงมนุษย์นาฬิกาทองแดงTik-Tokซึ่งต้องไขลานอยู่ตลอดเวลาและจะหยุดทำงานในเวลาที่ไม่เหมาะสม[ 39 ]
ในปี พ.ศ. 2446 วิศวกรชาวสเปนLeonardo Torres Quevedoได้นำเสนอระบบควบคุมด้วยคลื่นวิทยุที่เรียกว่าTelekinoที่สถาบันวิทยาศาสตร์แห่งปารีส[ 40 ]โดยมีจุดประสงค์เพื่อทดสอบเรือเหาะที่เขาออกแบบเองโดยไม่ต้องเสี่ยงชีวิตมนุษย์ แตกต่างจากกลไกก่อนหน้านี้ที่ควบคุมด้วยการนับพัลส์แบบง่ายๆ โดยไม่มีความสามารถในการสั่งการอย่างอิสระ Torres ได้สร้างระบบสำหรับควบคุมอุปกรณ์เชิงกลหรือไฟฟ้าใดๆ ที่มีสถานะการทำงานที่แตกต่างกัน[ 41 ] เครื่องส่งสัญญาณสามารถส่งรหัสคำต่างๆ ได้หลายชุดโดยใช้สัญญาณโทรเลขไบนารี และเครื่องรับสัญญาณสามารถตั้งค่าสถานะการทำงานที่แตกต่างกันในอุปกรณ์ที่ใช้ ขึ้นอยู่กับรหัสคำนั้นTelekinoสามารถดำเนินการคำสั่งได้ 19 คำสั่ง ในปี พ.ศ. 2447 Torres เลือกที่จะทำการ ทดสอบ Telekino ครั้งแรก ในยานพาหนะไฟฟ้าสามล้อบนบก[ 42 ]ในปี พ.ศ. 2449 ต่อหน้าผู้ชมซึ่งรวมถึงพระมหากษัตริย์แห่งสเปน ตอร์เรสได้สาธิตสิ่งประดิษฐ์นี้ที่ท่าเรือบิลบาโอโดยนำทางเรือจากชายฝั่งพร้อมผู้คนบนเรือ ซึ่งควบคุมได้จากระยะไกลกว่า 2 กิโลเมตร[ 43 ]
ทศวรรษ 1910
ในปี 1912 Leonardo Torres Quevedo ได้สร้างเครื่องจักรอัตโนมัติเครื่องแรกที่สามารถเล่นหมากรุกได้อย่างแท้จริง แตกต่างจากThe TurkและAjeeb ที่ควบคุมโดยมนุษย์ El Ajedrecista (นักเล่นหมากรุก) มีระบบอัตโนมัติแบบบูรณาการอย่างแท้จริงที่สร้างขึ้นเพื่อเล่นหมากรุกโดยไม่ต้องมีคำแนะนำจากมนุษย์ มันเล่นเฉพาะช่วงท้ายเกมด้วยหมากรุก สามตัว โดยเคลื่อนราชา สีขาว และเรือ โดยอัตโนมัติ เพื่อรุกฆาตราชาสีดำที่เคลื่อนโดยคู่ต่อสู้ที่เป็นมนุษย์[ 44 ] [ 45 ]ในปี 1951 El AjedrecistaเอาชนะSavielly Tartakowerในการประชุมไซเบอร์เนติกส์ที่ปารีส ทำให้เขา กลายเป็น แกรนด์มาสเตอร์ คนแรก ที่พ่ายแพ้ให้กับเครื่องจักร[ 46 ]ในบทความEssays on Automatics ในปี 1914 ของเขา Torres ได้เสนอเครื่องจักรที่ทำการ "ตัดสิน" โดยใช้เซ็นเซอร์ที่รับข้อมูลจากภายนอก ชิ้นส่วนที่ควบคุมโลกภายนอก เช่น แขน แหล่งพลังงาน เช่น แบตเตอรี่และความดันอากาศ และที่สำคัญที่สุดคือ ข้อมูลที่รับมาและข้อมูลในอดีต มันถูกนิยามว่าเป็นสิ่งมีชีวิตที่สามารถควบคุมปฏิกิริยาตอบสนองต่อข้อมูลภายนอกและปรับตัวให้เข้ากับการเปลี่ยนแปลงของสิ่งแวดล้อมเพื่อเปลี่ยนพฤติกรรมของมัน[ 47 ] [ 48 ] [ 49 ] [ 50 ]
ทศวรรษ 1920
คำว่า "หุ่นยนต์" ถูกใช้ครั้งแรกในบทละครที่ตีพิมพ์โดยKarel Čapek ชาวเช็ก ในปี 1920 RUR ( Rossum's Universal Robots ) เป็นบทละครเสียดสี โดยหุ่นยนต์เป็นสิ่งมีชีวิตทางชีวภาพที่ถูกผลิตขึ้นเพื่อทำงานใช้แรงงานที่ไม่น่าพึงพอใจทั้งหมด[ 51 ]ตามที่ Čapek กล่าว คำนี้ถูกสร้างขึ้นโดยJosef น้องชายของเขา จากคำภาษาเช็กrobota ' corvée ' หรือในภาษาสโลวัก 'งาน' หรือ 'แรงงาน' [ 52 ] (Karel Čapek กำลังเขียนบทละครของเขาในระหว่างที่เขาพักอยู่ในTrenčianske Tepliceในสโลวาเกียซึ่งพ่อของเขาทำงานเป็นแพทย์) บทละครRURได้เข้ามาแทนที่การใช้คำว่า "automaton" ที่เป็นที่นิยม[ 53 ]
บริษัท Westinghouse Electric Corporationสร้าง Televox ขึ้นในปี 1926 โดยเป็นแผ่นกระดาษแข็งที่เชื่อมต่อกับอุปกรณ์ต่างๆ ซึ่งผู้ใช้สามารถเปิดและปิดได้[ 54 ]ในปี 1927 ภาพยนตร์เรื่อง MetropolisของFritz Langได้ออกฉาย โดยMaschinenmensch ("เครื่องจักร-มนุษย์") ซึ่งเป็น หุ่นยนต์รูปร่างคล้ายมนุษย์ หญิงหรือที่เรียกว่า "Parody", "Futura", "Robotrix" หรือ "Maria impersonator" (รับบทโดยนักแสดงชาวเยอรมันBrigitte Helm ) เป็นหุ่นยนต์ตัวแรกที่ปรากฏในภาพยนตร์[ 55 ]
หุ่นยนต์อัตโนมัติของญี่ปุ่นที่มีชื่อเสียงที่สุดถูกนำเสนอต่อสาธารณชนในปี 1927 Gakutensokuถูกสร้างขึ้นเพื่อทำหน้าที่ทางการทูต มันถูกขับเคลื่อนด้วยอากาศอัด สามารถเขียนได้อย่างคล่องแคล่วและยกเปลือกตาได้[ 19 ]หุ่นยนต์จำนวนมากถูกสร้างขึ้นก่อนยุคของเซอร์โวกลไกที่ควบคุมด้วยคอมพิวเตอร์ เพื่อวัตถุประสงค์ในการประชาสัมพันธ์ของบริษัทขนาดใหญ่ โดยพื้นฐานแล้วหุ่นยนต์เหล่านี้สามารถแสดงท่าทางผาดโผนได้เพียงไม่กี่อย่าง เช่นเดียวกับหุ่นยนต์อัตโนมัติในศตวรรษที่ 18 ในปี 1928 หุ่นยนต์ฮิวมานอยด์ตัวแรกๆ ตัวหนึ่งถูกจัดแสดงในงานนิทรรศการประจำปีของสมาคมวิศวกรแบบจำลองในลอนดอน หุ่นยนต์ตัวนี้ถูกประดิษฐ์โดย WH Richards ชื่อว่าEricประกอบด้วยชุดเกราะอะลูมิเนียม ที่มี แม่เหล็กไฟฟ้า 11 ตัวและมอเตอร์ 1 ตัวที่ขับเคลื่อนด้วยแหล่งจ่ายไฟ 12 โวลต์ หุ่นยนต์สามารถขยับมือและศีรษะได้ และสามารถควบคุมได้ด้วยรีโมทคอนโทรลหรือการควบคุมด้วยเสียง[ 56 ]
ทศวรรษ 1930
การออกแบบหุ่นยนต์อุตสาหกรรม รุ่นแรกๆ นั้นถูกนำไปผลิตในสหรัฐอเมริกาหุ่นยนต์ เหล่านี้ มีข้อต่อที่จำลองมาจากจลนศาสตร์ของไหล่แขน และข้อมือ ของมนุษย์ เพื่อจำลองการเคลื่อนไหวของมนุษย์ เช่น การดึง การผลัก การกด และการยก การเคลื่อนไหวสามารถควบคุมได้ผ่าน การตั้งโปรแกรม ลูกเบี้ยวและสวิตช์ในปี พ.ศ. 2481 วิลลาร์ด วี. พอลลาร์ดได้ยื่นคำขอจดสิทธิบัตรฉบับแรกสำหรับแขนดังกล่าว ซึ่งเรียกว่า "อุปกรณ์ควบคุมตำแหน่ง" ที่มีตัวควบคุมอิเล็กทรอนิกส์กระบอกสูบแบบนิวแมติกและมอเตอร์ที่ขับเคลื่อนแกนการเคลื่อนไหวหกแกน แต่หน่วยความจำดรัม ขนาดใหญ่ ทำให้การตั้งโปรแกรมใช้เวลานานและยาก[ 57 ]
ในปี พ.ศ. 2482 หุ่นยนต์ฮิวมานอยด์ที่รู้จักกันในชื่อElektroปรากฏตัวใน งาน มหกรรมโลก[ 58 ] [ 59 ]สูง 7 ฟุต (2.1 เมตร) และหนัก 265 ปอนด์ (120 กิโลกรัม) สามารถเดินได้ด้วยคำสั่งเสียง พูดได้ประมาณ 700 คำ (โดยใช้เครื่องเล่นแผ่นเสียง 78 รอบต่อนาที ) สูบบุหรี่ เป่าลูกโป่ง และขยับศีรษะและแขนได้ ตัวหุ่นยนต์ประกอบด้วยโครงเหล็กเฟืองและมอเตอร์หุ้มด้วยผิวอลูมิเนียม[ 60 ]
ในปี พ.ศ. 2482 Konrad Zuse ได้สร้าง คอมพิวเตอร์อิเล็กโทรเมคานิกส์แบบโปรแกรมได้เครื่องแรกซึ่งวางรากฐานสำหรับการสร้างเครื่องจักรรูปร่างมนุษย์ที่ปัจจุบันถือว่าเป็นหุ่นยนต์[ 61 ]การประยุกต์ใช้ตรรกะไบนารีกับสวิตช์ไฟฟ้าในทางปฏิบัติได้รับการสาธิตโดยClaude Shannonแต่เครื่องคิดเลข ของเขา ไม่สามารถตั้งโปรแกรมได้[ 62 ]
ทศวรรษ 1940
ในปี พ.ศ. 2484 และ พ.ศ. 2485 ไอแซค อาซิมอฟได้กำหนดกฎสามข้อของหุ่นยนต์และในกระบวนการนี้ได้บัญญัติศัพท์คำว่า "หุ่นยนต์ศาสตร์" [ 63 ] [ 64 ] [ 65 ]ในปี พ.ศ. 2488 แวนเนวาร์ บุชได้ตีพิมพ์ บทความชื่อ "As We May Think"ซึ่งเป็นบทความที่สำรวจศักยภาพของการประมวลผลข้อมูลอิเล็กทรอนิกส์เขาทำนายถึงการเกิดขึ้นของคอมพิวเตอร์ โปรแกรมประมวลผลคำดิจิทัลการจดจำเสียงและการแปลด้วยเครื่องจักรต่อมาเขาได้รับการยกย่องจากเท็ด เนลสันผู้คิดค้นไฮเปอร์เท็กซ์[ 18 ]

ในปี พ.ศ. 2486 Arturo Rosenblueth , Norbert WienerและJulian Bigelow ได้นำ ระบบประสาทส่วนกลางของมนุษย์มาใช้เป็นแบบจำลองการควบคุมสำหรับระบบอาวุธปืนอัตโนมัติด้วยเหตุนี้ พวกเขาจึงเป็นผู้บุกเบิกด้านไซเบอร์เนติกส์ (ภาษากรีกแปลว่าผู้ควบคุม ) และสร้างแบบจำลองการประมวลผลข้อมูลโดยตั้งสมมติฐานว่าสัตว์จะสื่อสารประสบการณ์ทางประสาทสัมผัสไปยังระบบประสาทส่วนกลางอย่างต่อเนื่องในรูปแบบของการตอบรับอัตโนมัติและไม่สมัครใจ จึงสามารถควบคุมกระบวนการต่างๆ เช่นการหายใจการไหลเวียนโลหิตและการย่อยอาหารได้ [ 66 ] หลังสงครามโลกครั้งที่สองในการประชุมเกี่ยวกับไซเบอร์เนติกส์ในปี พ.ศ. 2489 Warren McCullochได้รวบรวมทีมงานที่ประกอบด้วยนักคณิตศาสตร์ วิศวกรคอมพิวเตอร์นักสรีรวิทยาและนักจิตวิทยาเพื่อทำงานเกี่ยวกับการทำงานของเครื่องจักรโดยใช้ระบบชีวภาพเป็นจุดเริ่มต้น หลังจากการตีพิมพ์หนังสือของเขาในปี พ.ศ. 2491 แนวคิดของ Wiener ที่ว่าระบบที่ไม่มีชีวิตสามารถจำลองระบบชีวภาพและสังคมได้โดยใช้เซ็นเซอร์ นำไปสู่การปรับทฤษฎีไซเบอร์เนติกส์เข้ากับเครื่องจักรในอุตสาหกรรม แต่ตัวควบคุมเซอร์โวพิสูจน์แล้วว่าไม่เพียงพอที่จะทำให้บรรลุระดับการทำงานอัตโนมัติที่ต้องการ[ 67 ]
หุ่นยนต์อัตโนมัติอิเล็กทรอนิกส์ตัวแรกที่มีพฤติกรรมซับซ้อนถูกสร้างขึ้นโดยWilliam Grey Walterจากสถาบันประสาทวิทยา Burdenที่บริสตอล ประเทศอังกฤษ ในปี 1948 และ 1949 เขาต้องการพิสูจน์ว่าการเชื่อมต่อที่แน่นแฟ้นระหว่างเซลล์สมอง จำนวนน้อย สามารถก่อให้เกิดพฤติกรรม ที่ซับซ้อนมากได้ ซึ่งโดยพื้นฐานแล้วคือความลับของการทำงานของสมองอยู่ที่วิธีการเชื่อมต่อของมัน หุ่นยนต์ตัวแรกของเขาชื่อElmer และ Elsieถูกสร้างขึ้นระหว่างปี 1948 และ 1949 และมักถูกอธิบายว่าเป็น "เต่า" เนื่องจากรูปร่างและอัตราการเคลื่อนที่ที่ช้า หุ่นยนต์เต่าสามล้อเหล่านี้สามารถเคลื่อนที่ตามแสงได้ซึ่งทำให้พวกมันสามารถหาทางไปยังสถานีชาร์จได้เมื่อพลังงานแบตเตอรี่เหลือน้อย[ 68 ]
วอลเตอร์เน้นย้ำถึงความสำคัญของการใช้อุปกรณ์อิเล็กทรอนิกส์แบบอนาล็อก ล้วนๆ เพื่อจำลองกระบวนการทางสมอง ในขณะที่คนร่วมสมัยของเขา เช่นอลัน ทัวริงและจอห์น ฟอน นอยมันน์ต่างหันไปมองกระบวนการทางจิตในแง่ของการคำนวณแบบดิจิทัล งานของวอลเตอร์เป็นแรงบันดาลใจให้กับนักวิจัยด้านหุ่นยนต์รุ่นต่อมา เช่นร็อดนีย์ บรูคส์ฮันส์ โมราเวคและมาร์ค ทิลเดน หุ่น ยนต์BEAMในรูปแบบที่ทันสมัยซึ่งได้รับแรงบันดาลใจจาก "เต่า" ของวอลเตอร์[ 69 ]
ในปี 1949 โทนี่ เซล สร้าง หุ่นยนต์ฮิวมานอยด์ขนาด 6 ฟุต (1.8 เมตร) อย่างง่ายๆ ขึ้นมา ตัวหนึ่ง และตั้ง ชื่อว่าจอร์จโดยใช้วัสดุโลหะเหลือใช้จาก เครื่องบินทิ้งระเบิด เวลลิงตัน ที่จอดเสียอยู่ หลังจากเก็บไว้ในโรงเก็บของของนักประดิษฐ์ หุ่นยนต์ตัวนี้ได้รับการบูรณะในปี 2010 และนำมาแสดงในตอนหนึ่งของรายการWallace & Gromit's World of Inventionหลังจากนั้น โทนี่ เซล ได้บริจาคจอร์จให้กับพิพิธภัณฑ์คอมพิวเตอร์แห่งชาติซึ่งยังคงจัดแสดงให้ประชาชนได้ชมจนถึงปัจจุบัน
ทศวรรษ 1950

ในปี พ.ศ. 2494 วอลเตอร์ได้ตีพิมพ์บทความเรื่อง"เครื่องจักรที่เรียนรู้"ซึ่งบันทึกว่าหุ่นยนต์เชิงกลขั้นสูงของเขาทำหน้าที่เป็นตัวแทนอัจฉริยะ ได้อย่างไร โดยแสดงให้เห็นถึงการเรียนรู้แบบสะท้อนกลับแบบมีเงื่อนไข[ 18 ]
Unimateหุ่นยนต์ดิจิทัลตัวแรกที่สามารถตั้งโปรแกรมได้ ถูกคิดค้นโดยGeorge Devolในปี พ.ศ. 2493 และ "ถือเป็นรากฐานของอุตสาหกรรมหุ่นยนต์สมัยใหม่" [ 70 ] [ 71 ]
ในญี่ปุ่น หุ่นยนต์กลายเป็นตัวละครการ์ตูนยอดนิยม หุ่นยนต์กลายเป็นสัญลักษณ์ทางวัฒนธรรม และรัฐบาลญี่ปุ่นก็ได้รับการกระตุ้นให้สนับสนุนการวิจัยด้านหุ่นยนต์ตัวละครที่โดดเด่นที่สุดตัวหนึ่งคือแอสโทรบอยซึ่งได้รับการสอนให้มีความรู้สึกแบบมนุษย์ เช่น ความรัก ความกล้าหาญ และความไม่มั่นใจในตนเอง ในเชิงวัฒนธรรม หุ่นยนต์ในญี่ปุ่นถูกมองว่าเป็นผู้ช่วยเหลือเพื่อนมนุษย์[ 72 ]
การนำทรานซิสเตอร์มาใช้ในคอมพิวเตอร์ในช่วงกลางทศวรรษ 1950 ทำให้ขนาดลดลงและประสิทธิภาพเพิ่มขึ้น ดังนั้น การคำนวณและการเขียนโปรแกรมจึงสามารถนำไปรวมเข้ากับแอปพลิเคชันต่างๆ ได้มากมาย รวมถึงระบบอัตโนมัติ[ 73 ]ในปี 1959 นักวิจัยจากสถาบันเทคโนโลยีแมสซาชูเซตส์ (MIT) ได้สาธิตการผลิตโดยใช้คอมพิวเตอร์ช่วย[ 74 ]
ทศวรรษ 1960
Devol ขาย Unimate เครื่องแรกให้กับGeneral Motorsในปี 1960 และติดตั้งในโรงงานที่Ewing Township รัฐนิวเจอร์ซีย์ ในปี 1961 เพื่อยกชิ้นส่วนโลหะร้อนจาก เครื่อง หล่อขึ้นรูปและวางลงในของเหลวหล่อเย็น[ 75 ] [ 76 ] "โดยไม่มีการประกาศใดๆ หุ่นยนต์ที่ใช้งานได้จริงเครื่องแรกของโลกได้เข้าร่วมสายการผลิตที่โรงงาน General Motors ใน Ewing Township ในฤดูใบไม้ผลิปี 1961... มันเป็นแม่พิมพ์หล่อขึ้นรูปอัตโนมัติที่ปล่อยมือจับประตูที่ร้อนจัดและชิ้นส่วนรถยนต์อื่นๆ ลงในสระน้ำหล่อเย็นบนสายการผลิตที่เคลื่อนย้ายไปยังคนงานเพื่อตัดแต่งและขัดเงา" สิทธิบัตรของ Devol สำหรับแขนหุ่นยนต์แบบโปรแกรมได้ที่ทำงานด้วยระบบดิจิทัลเครื่องแรกเป็นรากฐานของอุตสาหกรรมหุ่นยนต์สมัยใหม่[ 77 ]

แขนหุ่นยนต์ Rancho Arm ถูกพัฒนาขึ้นเพื่อช่วยเหลือผู้ป่วยพิการที่โรงพยาบาล Rancho Los Amigosในเมืองดาวนีย์ รัฐแคลิฟอร์เนียโดยมหาวิทยาลัยสแตนฟอร์ดได้ซื้อแขนหุ่นยนต์ที่ควบคุมด้วยคอมพิวเตอร์นี้ในปี 1963 [ 78 ] ในปี 1967 หุ่นยนต์อุตสาหกรรมตัวแรกถูกนำไปใช้งานจริงในประเทศญี่ปุ่น หุ่นยนต์ Versatran ได้รับการพัฒนาโดยAmerican Machine and Foundryหนึ่งปีต่อมา หุ่นยนต์ไฮดรอลิกที่ออกแบบโดยUnimationถูกนำไปผลิตโดยKawasaki Heavy Industries [ 79 ] Marvin Minskyสร้างแขนหุ่นยนต์ Tentacle Arm ในปี 1968 โดยแขนหุ่นยนต์นี้ถูกควบคุมด้วยคอมพิวเตอร์และข้อต่อทั้ง 12 ข้อขับเคลื่อนด้วยระบบไฮดรอลิก[ 78 ]ในปี 1969 Victor Scheinmanนักศึกษาวิศวกรรมเครื่องกลได้สร้างแขนหุ่นยนต์ Stanford Arm ซึ่งได้รับการยอมรับว่าเป็นแขนหุ่นยนต์ที่ควบคุมด้วยคอมพิวเตอร์อิเล็กทรอนิกส์ตัวแรก เนื่องจากคำสั่งของ Unimate ถูกเก็บไว้ในดรัมแม่เหล็ก[ 78 ]
ในช่วงปลายทศวรรษ 1960 สงครามเวียดนามกลายเป็นสนามทดสอบสำหรับเทคโนโลยีการสั่งการอัตโนมัติและเครือข่ายเซ็นเซอร์[ 80 ]ในปี 1966 มีการเสนอ แนวป้องกันแม็คนามาราโดยมีเป้าหมายที่จะไม่ต้องใช้กำลังภาคพื้นดินเลย เครือข่ายเซ็นเซอร์นี้ประกอบด้วยเซ็นเซอร์แผ่นดินไหวและอะคูสติก การลาดตระเวนด้วยภาพถ่าย และทุ่นระเบิดที่ทำงานด้วยเซ็นเซอร์แต่การนำไปใช้งานจริงนั้นมีเพียงบางส่วนเท่านั้นเนื่องจากต้นทุนสูง[ 81 ]หุ่นยนต์เคลื่อนที่ตัวแรกที่สามารถวิเคราะห์สภาพแวดล้อมได้เอง คือShakeyถูกสร้างขึ้นในปี 1970 โดยสถาบันวิจัยสแตนฟอร์ด (ปัจจุบันคือSRI International ) Shakey ผสานรวมอินพุตเซ็นเซอร์หลายตัว รวมถึงกล้องโทรทัศน์เครื่องวัดระยะด้วยเลเซอร์และ "เซ็นเซอร์ตรวจจับการชน" เพื่อนำทาง[ 78 ]
ทศวรรษ 1970

ในช่วงต้นทศวรรษ 1970 มีการพัฒนาอาวุธที่มีความแม่นยำสูงและอาวุธอัจฉริยะ อาวุธกลายเป็นหุ่นยนต์โดยการนำระบบนำทางขั้นสุดท้ายมาใช้ ในช่วงปลายสงครามเวียดนาม มีการนำระเบิดนำวิถีด้วยเลเซอร์มาใช้เป็นครั้งแรก ซึ่งสามารถค้นหาเป้าหมายได้โดยการติดตามลำแสงเลเซอร์ที่ชี้ไปยังเป้าหมาย ในระหว่างปฏิบัติการ Linebacker ในปี 1972 ระเบิดนำวิถีด้วยเลเซอร์พิสูจน์แล้วว่ามีประสิทธิภาพ แต่ก็ยังต้องพึ่งพาผู้ควบคุมที่เป็นมนุษย์เป็นอย่างมาก อาวุธแบบ ยิงแล้วลืมก็ถูกนำมาใช้เป็นครั้งแรกในช่วงปลายสงครามเวียดนามเช่นกัน เมื่อยิงออกไปแล้วไม่จำเป็นต้องให้ความสนใจหรือดำเนินการใดๆ เพิ่มเติมจากผู้ควบคุม[ 81 ]
การพัฒนาหุ่นยนต์ฮิวมานอยด์ก้าวหน้าไปอย่างมากโดย นักวิทยาศาสตร์ หุ่นยนต์ชาวญี่ปุ่นในช่วงทศวรรษ 1970 [ 82 ]มหาวิทยาลัยวาเซดะริเริ่มโครงการ WABOT ในปี 1967 และในปี 1972 ได้สร้าง WABOT-1 เสร็จสมบูรณ์ ซึ่งเป็นหุ่นยนต์อัจฉริยะฮิวมานอยด์ขนาดเต็มตัวแรกของโลก[ 83 ]ระบบควบคุมแขนขาของมันช่วยให้มันสามารถเดินด้วยขา และจับและเคลื่อนย้ายวัตถุด้วยมือโดยใช้เซ็นเซอร์สัมผัส ระบบการมองเห็นช่วยให้มันวัดระยะทางและทิศทางไปยังวัตถุโดยใช้ตัวรับภายนอก ดวงตาและหูเทียม และระบบการสนทนาช่วยให้มันสื่อสารกับคนในภาษาญี่ปุ่นด้วยปากเทียม ทำให้มันเป็นแอนดรอยด์ตัว แรก [ 84 ] [ 85 ]
เฟรดดี้และเฟรดดี้ 2เป็นหุ่นยนต์ที่สร้างขึ้นที่คณะสารสนเทศศาสตร์ มหาวิทยาลัยเอดินบะระโดยแพท แอมเบลอร์ , โรบิน ป็อปเปิลสโตน , ออสติน เทตและโดนัลด์ มิตชีและสามารถประกอบบล็อกไม้ได้ภายในเวลาหลายชั่วโมง[ 86 ]บริษัทKUKA ซึ่งตั้งอยู่ในเยอรมนี ได้สร้างหุ่นยนต์อุตสาหกรรมตัวแรกของโลกที่มีแกนขับเคลื่อนด้วยไฟฟ้าเชิงกลหกแกน ซึ่งรู้จักกันในชื่อ FAMULUS [ 87 ]
ในปี พ.ศ. 2517 ไมเคิล เจ. ฟรีแมนได้สร้างลีอาคิม ซึ่งเป็นหุ่นยนต์ครูที่ได้รับการตั้งโปรแกรมด้วยหลักสูตรการเรียนการสอน รวมถึงข้อมูลชีวประวัติบางส่วนของนักเรียน 40 คนที่ลีอาคิมได้รับการตั้งโปรแกรมให้สอน[ 88 ]ลีอาคิมมีความสามารถในการสังเคราะห์ เสียง พูดของมนุษย์[ 89 ]ลีอาคิมได้รับการทดสอบในห้องเรียนชั้นประถมศึกษาปีที่ 4 ใน เขต บรองซ์ของนครนิวยอร์ก [ 90 ]
ในปี พ.ศ. 2517 เดวิด ซิลเวอร์ ได้ออกแบบแขนกลซิลเวอร์อาร์ม ซึ่งสามารถเคลื่อนไหวได้อย่างละเอียดเลียนแบบมือมนุษย์ โดยมีการให้ข้อมูลป้อนกลับผ่านเซ็นเซอร์สัมผัสและแรงกด และวิเคราะห์โดยคอมพิวเตอร์[ 78 ] แขนกลหุ่นยนต์ประกอบแบบยืดหยุ่นที่เลือกได้ (SCARA ) ถูกสร้างขึ้นในปี พ.ศ. 2521 ในฐานะแขนกลหุ่นยนต์ 4 แกนที่มีประสิทธิภาพ เหมาะที่สุดสำหรับการหยิบชิ้นส่วนและวางในตำแหน่งอื่น SCARA ถูกนำมาใช้ในสายการประกอบในปี พ.ศ. 2524 [ 91 ]
รถเข็น Stanford ประสบความสำเร็จในการข้ามห้องที่เต็มไปด้วยเก้าอี้ในปี 1979 โดยอาศัยการมองเห็นแบบสเตอริโอ เป็นหลัก ในการนำทางและกำหนดระยะทาง[ 78 ]สถาบันหุ่นยนต์แห่งมหาวิทยาลัย Carnegie Mellonก่อตั้งขึ้นในปี 1979 โดยRaj Reddy [ 92 ]
ทศวรรษ 1980


Takeo Kanadeสร้าง "แขนขับเคลื่อนโดยตรง" ตัวแรกในปี 1981 ซึ่งเป็นครั้งแรกที่มอเตอร์ของแขนถูกบรรจุอยู่ภายในตัวหุ่นยนต์เอง ทำให้ไม่ต้องใช้ระบบส่งกำลังที่ยาว[ 94 ]
ในปี พ.ศ. 2527 ได้มีการเปิดเผย Wabot-2 ซึ่งสามารถเล่นออร์แกนได้ Wabot-2 มีนิ้ว 10 นิ้วและเท้า 2 ข้าง Wabot-2 สามารถอ่านโน้ตเพลงและบรรเลงประกอบให้กับบุคคลได้[ 95 ]
ในปี พ.ศ. 2529 ฮอนด้าได้เริ่มโครงการวิจัยและพัฒนาหุ่นยนต์ฮิวมานอยด์เพื่อสร้างหุ่นยนต์ที่สามารถโต้ตอบกับมนุษย์ได้อย่างประสบความสำเร็จ[ 96 ]หุ่น ยนต์ หกขาชื่อเจงกิสได้รับการเปิดเผยโดย MIT ในปี พ.ศ. 2532 เจงกิสมีชื่อเสียงในด้านการผลิตที่รวดเร็วและราคาถูกเนื่องจากวิธีการสร้าง เจงกิสใช้ไมโครโปรเซสเซอร์ 4 ตัว เซ็นเซอร์ 22 ตัว และมอเตอร์เซอร์โว 12 ตัว[ 97 ]ร็อดนีย์ บรูคส์และอนิตา เอ็ม. ฟลินน์ตีพิมพ์บทความเรื่อง "เร็ว ราคาถูก และควบคุมไม่ได้: การบุกรุกของหุ่นยนต์ในระบบสุริยะ" บทความนี้สนับสนุนการสร้างหุ่นยนต์ขนาดเล็กและราคาถูกกว่าในจำนวนที่มากขึ้นเพื่อเพิ่มเวลาในการผลิตและลดความยากลำบากในการส่งหุ่นยนต์ขึ้นสู่อวกาศ[ 98 ]
ทศวรรษ 1990
ในปี พ.ศ. 2537 อุปกรณ์ผ่าตัดด้วยหุ่นยนต์ช่วยผ่าตัดที่ประสบความสำเร็จมากที่สุดชิ้นหนึ่ง ได้รับการอนุมัติจาก FDA Cyberknife ถูกคิดค้นโดยJohn R. Adlerและระบบแรกถูกติดตั้งที่มหาวิทยาลัยสแตนฟอร์ดในปี พ.ศ. 2534 ระบบการผ่าตัดด้วยรังสี นี้ได้รวม การผ่าตัดโดยใช้ภาพนำทางเข้า กับการจัดตำแหน่งด้วยหุ่นยนต์ ปัจจุบัน Cyberknife ถูกนำไปใช้ในการรักษาผู้ป่วยที่มี เนื้องอกในสมองหรือกระดูกสันหลังกล้องเอ็กซ์เรย์จะติดตามการเคลื่อนที่และชดเชยการเคลื่อนไหวที่เกิดจากการหายใจ[ 99 ]
หุ่นยนต์เลียนแบบชีวภาพRoboTunaถูกสร้างขึ้นโดยนักศึกษาปริญญาเอก David Barrett ที่สถาบันเทคโนโลยีแมสซาชูเซตส์ในปี 1996 เพื่อศึกษาการว่ายน้ำของปลาในน้ำ RoboTuna ถูกออกแบบมาให้ว่ายน้ำและมีลักษณะคล้ายปลา ทูน่า ครีบน้ำเงิน[ 100 ]

หุ่นยนต์ฮิวมานอยด์ P2ของฮอนด้าเปิดตัวครั้งแรกในปี 1996 โดยชื่อย่อมาจาก "Prototype Model 2" (ต้นแบบรุ่นที่ 2) ซึ่งเป็นส่วนสำคัญของโครงการพัฒนาหุ่นยนต์ฮิวมานอยด์ของฮอนด้า หุ่นยนต์ P2 มีความสูงกว่า 6 ฟุต (1.8 เมตร) ซึ่งเล็กกว่ารุ่นก่อนหน้าและดูเหมือนจะเคลื่อนไหวได้เหมือนมนุษย์มากขึ้น[ 101 ]
ยานสำรวจ Sojournerซึ่งคาดว่าจะใช้งานได้เพียงเจ็ดวัน กลับหยุดทำงานหลังจากใช้งานไปได้ 83 วันในปี 1997 หุ่นยนต์ขนาดเล็กนี้ (หนักเพียง 23 ปอนด์ หรือ 10.5 กิโลกรัม) ทำหน้าที่กึ่งอัตโนมัติบนพื้นผิวของดาว อังคาร ซึ่งเป็นส่วนหนึ่งของ ภารกิจ Mars Pathfinderโดย Sojourner ติดตั้งโปรแกรมหลีกเลี่ยงสิ่งกีดขวาง ทำให้สามารถวางแผนและนำทางเพื่อศึกษาพื้นผิวของดาวเคราะห์ได้ ความสามารถในการนำทางของ Sojourner โดยใช้ข้อมูลเกี่ยวกับสภาพแวดล้อมและบริเวณโดยรอบเพียงเล็กน้อย ทำให้มันสามารถตอบสนองต่อเหตุการณ์และวัตถุที่ไม่คาดคิดได้[ 102 ]
หุ่น ยนต์ฮิวมานอยด์ P3เปิดตัวโดยฮอนด้าในปี 1998 ซึ่งเป็นส่วนหนึ่งของโครงการหุ่นยนต์ฮิวมานอยด์ที่ดำเนินอยู่ของบริษัท[ 103 ]ในปี 1999 โซนี่ได้เปิดตัวAIBOซึ่งเป็นหุ่นยนต์สุนัขที่สามารถโต้ตอบกับมนุษย์ได้ โดยรุ่นแรกที่วางจำหน่ายในญี่ปุ่นขายหมดภายใน 20 นาที[ 104 ]ฮอนด้าได้เปิดเผยผลลัพธ์ที่ก้าวหน้าที่สุดของโครงการหุ่นยนต์ฮิวมานอยด์ในปี 2000 ซึ่งมีชื่อว่าASIMO ASIMO สามารถวิ่ง เดิน สื่อสารกับมนุษย์ จดจำใบหน้า สภาพแวดล้อม เสียง และท่าทาง และโต้ตอบกับสภาพแวดล้อมได้[ 105 ]โซนี่ยังได้เปิดเผยSony Dream Robots ซึ่ง เป็นหุ่นยนต์ฮิวมานอยด์ขนาดเล็กที่อยู่ระหว่างการพัฒนาเพื่อความบันเทิง[ 106 ]ในเดือนตุลาคมปี 2000 องค์การสหประชาชาติประเมินว่ามีหุ่นยนต์อุตสาหกรรม 742,500 ตัวทั่วโลก โดยมากกว่าครึ่งหนึ่งถูกใช้งานในประเทศญี่ปุ่น[ 31 ]
ทศวรรษ 2000

ในเดือนเมษายน พ.ศ. 2544 แขนกล Canadarm2ถูกส่งขึ้นสู่วงโคจรและติดตั้งเข้ากับสถานีอวกาศนานาชาติ Canadarm2 เป็นแขนกลรุ่นที่ใหญ่กว่าและมีประสิทธิภาพมากกว่าที่ใช้โดยกระสวยอวกาศและได้รับการยกย่องว่าเป็น "ฉลาดกว่า" [ 107 ]ในเดือนเมษายนเช่นกัน ยานบินไร้คนขับGlobal Hawkได้ทำการบินอัตโนมัติแบบไม่หยุดพักครั้งแรกเหนือมหาสมุทรแปซิฟิกจากฐานทัพอากาศ Edwardsในแคลิฟอร์เนียไปยังฐานทัพอากาศ RAAF Edinburghทางตอนใต้ของออสเตรเลีย การบินครั้งนี้ใช้เวลา 22 ชั่วโมง[ 108 ]
Roomba ซึ่ง เป็น เครื่องดูดฝุ่นหุ่นยนต์ ที่ได้รับความนิยมเปิดตัวครั้งแรกในปี พ.ศ. 2545 โดยบริษัทiRobot [ 109 ]
ในปี 2002 ในหนังสือDesigning Sociable Robots ของเธอ Cynthia Breazealเป็นหนึ่งในคนแรกๆ ที่สำรวจแนวคิดเรื่องหุ่นยนต์เลียนแบบมนุษย์ และตีพิมพ์งานวิจัยเกี่ยวกับวิธีการสอนหุ่นยนต์ฮิวมานอยด์ให้ทำงานใหม่ๆ ในอนาคต ซึ่งอาจทำได้ง่ายๆ เพียงแค่แสดงให้พวกมันเห็น[ 110 ]ตลอดช่วงต้นทศวรรษ 2000 Breazeal ได้ทำการทดลองเกี่ยวกับการแลกเปลี่ยนทางสังคมที่แสดงออกระหว่างมนุษย์และหุ่นยนต์ฮิวมานอยด์ ในขณะที่กำลังทำปริญญาเอกที่MITเธอได้ทำงานเกี่ยวกับหุ่นยนต์ฮิวมานอยด์ Kismet, Leonard, Aida, Autom และ Huggable [ 111 ]จากการทำเช่นนี้ Breazeal พบว่าปัญหาคือหุ่นยนต์มักจะโต้ตอบกับวัตถุเท่านั้น ไม่ใช่กับผู้คน และแนะนำว่าหุ่นยนต์สามารถนำมาใช้เพื่อปรับปรุงความสัมพันธ์ระหว่างมนุษย์ได้
ในปี 2548 มหาวิทยาลัยคอร์เนลล์ได้เปิดเผยระบบหุ่นยนต์แบบโมดูลบล็อกที่สามารถเชื่อมต่อและถอดออกได้ ซึ่งได้รับการอธิบายว่าเป็นหุ่นยนต์ตัวแรกที่สามารถจำลองตัวเองได้ เนื่องจากสามารถประกอบสำเนาของตัวเองได้หากวางไว้ใกล้กับบล็อกอื่นๆ ที่ประกอบขึ้นเป็นตัวมัน[ 112 ]ยานสำรวจดาวอังคารSpiritและOpportunity ซึ่งเปิดตัวในปี 2546 ในวันที่ 3 และ 24 มกราคม ได้ลงจอดบนพื้นผิวของดาวอังคาร หุ่นยนต์ทั้งสองตัวขับเคลื่อนไปได้ไกลกว่าที่คาดการณ์ไว้หลายเท่า และ Opportunity ยังคงทำงานอยู่จนถึงกลางปี 2561 ก่อนที่จะขาดการติดต่อสื่อสารเนื่องจากพายุฝุ่นขนาดใหญ่[ 113 ]
รถยนต์ขับเคลื่อนอัตโนมัติเริ่มปรากฏตัวขึ้นราวปี 2005 แต่ก็ยังมีช่องว่างให้ปรับปรุง อุปกรณ์ทั้ง 15 ชิ้นที่เข้าร่วมการแข่งขันDARPA Grand Challenge (2004) ไม่สามารถวิ่งผ่านเส้นทางได้สำเร็จ อันที่จริงแล้ว ไม่มีหุ่นยนต์ตัวใดสามารถนำทางได้สำเร็จเกิน 5% ของเส้นทางออฟโรดระยะทาง 150 ไมล์ (240 กม.) ทำให้รางวัล 1 ล้านดอลลาร์สหรัฐฯ หายไป[ 114 ]ในปี 2005 ฮอนด้าได้เปิดตัวหุ่นยนต์ ASIMO รุ่นใหม่ ซึ่งได้รับการปรับปรุงด้วยพฤติกรรมและความสามารถใหม่ๆ[ 115 ]ในปี 2006 มหาวิทยาลัยคอร์เนลได้เปิดตัวหุ่นยนต์ "Starfish" ซึ่งเป็นหุ่นยนต์สี่ขาที่สามารถจำลองตัวเองและเรียนรู้ที่จะเดินหลังจากได้รับความเสียหาย[ 116 ]ในปี 2007 TOMYได้เปิดตัวหุ่นยนต์เพื่อความบันเทิง i-sobot ซึ่งเป็นหุ่นยนต์สองขาที่มีลักษณะคล้ายมนุษย์ สามารถเดินได้เหมือนมนุษย์ และทำการเตะและต่อย รวมถึงแสดงท่าทางและแอ็คชั่นพิเศษต่างๆ ใน "โหมดแอ็คชั่นพิเศษ"

ทศวรรษ 2010
ทศวรรษ 2010 โดดเด่นด้วยการพัฒนาครั้งใหญ่ในด้านความพร้อมใช้งาน ประสิทธิภาพ และความอเนกประสงค์ของชิ้นส่วนหุ่นยนต์ที่มีจำหน่ายทั่วไป รวมถึงการแพร่หลายของหุ่นยนต์ในชีวิตประจำวัน ซึ่งก่อให้เกิดทั้งการคาดการณ์ในแง่ดีและความกังวลใหม่ๆ ในสังคม
การพัฒนาหุ่นยนต์ฮิวมานอยด์ยังคงก้าวหน้าต่อไปโรโบโนต์ 2ถูกส่งไปยังสถานีอวกาศนานาชาติบนกระสวยอวกาศดิสคัฟเวอรีใน ภารกิจ STS-133ในปี 2011 ในฐานะหุ่นยนต์ฮิวมานอยด์ ตัวแรก ในอวกาศ แม้ว่าจุดประสงค์เริ่มต้นคือการสอนวิศวกรเกี่ยวกับพฤติกรรมของหุ่นยนต์ที่มีความคล่องแคล่วในอวกาศ แต่ก็มีความหวังว่าด้วยการอัปเกรดและความก้าวหน้า หุ่นยนต์ตัวนี้จะสามารถออกไปนอกสถานีเพื่อช่วยเหลือนักบินอวกาศในการซ่อมแซมหรือเพิ่มเติมสถานี หรือทำงานทางวิทยาศาสตร์ได้ในอนาคต[ 117 ]ในช่วงปลายทศวรรษ หุ่นยนต์ฮิวมานอยด์และหุ่นยนต์ที่มีลักษณะคล้ายสัตว์สามารถผ่านด่านอุปสรรคที่ยากลำบาก รักษาความสมดุล และแม้กระทั่งแสดงกายกรรมได้ [ 118 ] อย่างไรก็ตามการพัฒนาหุ่นยนต์ส่วนใหญ่ในช่วงทศวรรษ 2010 กลับเป็นการพัฒนาหุ่นยนต์ขนาดเล็กที่มีความเชี่ยวชาญเฉพาะด้านที่ไม่ใช่หุ่นยนต์ฮิวมานอยด์ ซึ่งมีราคาถูกลง มีความสามารถมากขึ้น และแพร่หลายมากขึ้น
กฎของมัวร์และการบูรณาการชิ้นส่วนอิเล็กทรอนิกส์ดิจิทัลเข้ากับระบบขนาดเล็กและทรงพลังบนชิปทำให้การคำนวณหนักที่จำเป็นสำหรับการทำงานของระบบหุ่นยนต์สามารถทำได้โดยอุปกรณ์ที่มีขนาดเล็กลงเรื่อยๆ ความก้าวหน้าเหล่านี้ในเทคโนโลยีชิปและเซ็นเซอร์ส่วนใหญ่เกิดขึ้นจากความเติบโตและการแพร่หลายของสมาร์ทโฟนซึ่งต้องการชิ้นส่วนใหม่เหล่านี้เพื่อตอบสนองความต้องการที่เพิ่มขึ้นในการใช้งานในชีวิตประจำวัน
การลดต้นทุนและน้ำหนักของส่วนประกอบเหล่านี้ส่งผลให้เกิดหุ่นยนต์เฉพาะทางชนิดใหม่ๆ มากมายควอดคอปเตอร์ ซึ่งเป็นสิ่งใหม่ในช่วงต้นทศวรรษ กลายเป็นแพลตฟอร์มที่แพร่หลายสำหรับระบบหุ่นยนต์ โดยมีคุณสมบัติการนำทางและการรักษาเสถียรภาพแบบอัตโนมัติ และบรรทุกเซ็นเซอร์ที่มีประสิทธิภาพมากขึ้นเรื่อยๆ รวมถึงกล้องความละเอียดสูงแบบรักษาเสถียรภาพ เรดาร์ และอุปกรณ์สำรวจ ในช่วงปลายทศวรรษ ต้นทุนของควอดคอปเตอร์หุ่นยนต์ที่มี กล้อง 4Kและการนำทางอัตโนมัติลดลงจนอยู่ในช่วงงบประมาณของนักเล่นงานอดิเรก[ 119 ]และบริษัทต่างๆ เช่นAmazonกำลังสำรวจการใช้ควอดคอปเตอร์เพื่อส่งสินค้าแบบอัตโนมัติ แม้ว่าการใช้งานระบบนี้จะไม่ได้เกิดขึ้นในวงกว้างในช่วงทศวรรษนั้น[ 120 ]
ทศวรรษนี้ยังได้เห็นการเติบโตอย่างรวดเร็วของศักยภาพด้านปัญญาประดิษฐ์ตลอดช่วงทศวรรษ 2010 ความสามารถของคอมพิวเตอร์บนหุ่นยนต์เพิ่มขึ้นจนถึงจุดที่หุ่นยนต์สามารถทำงานที่ซับซ้อนมากขึ้นได้โดยไม่ต้องมีการควบคุมจากมนุษย์ รวมถึงประมวลผลข้อมูลในรูปแบบที่ซับซ้อนกว่าเดิมได้ด้วยตนเอง การเติบโตของ เครือข่าย ข้อมูลเคลื่อนที่และพลังของกราฟิกการ์ด ที่เพิ่มขึ้น สำหรับการใช้งานปัญญาประดิษฐ์ยังช่วยให้หุ่นยนต์สามารถสื่อสารกับกลุ่มคลัสเตอร์ ที่อยู่ห่างไกล ได้แบบเรียลไทม์ ซึ่งเป็นการเพิ่มขีดความสามารถของหุ่นยนต์ที่เรียบง่ายที่สุดให้สามารถนำเทคนิคปัญญาประดิษฐ์ที่ล้ำสมัยมาใช้ได้อย่างมีประสิทธิภาพ
ทศวรรษ 2010 ยังได้เห็นการเติบโตของกระบวนทัศน์ซอฟต์แวร์ใหม่ ๆ ซึ่งทำให้หุ่นยนต์และระบบ AI สามารถใช้ประโยชน์จากพลังการประมวลผลที่เพิ่มขึ้นนี้ได้เครือข่ายประสาทเทียมได้รับการพัฒนาอย่างดียิ่งขึ้นในช่วงทศวรรษ 2010 โดยบริษัทต่าง ๆ เช่น Google ได้เสนอการเข้าถึงผลิตภัณฑ์อย่างTensorFlow อย่างเสรีและเปิดกว้าง ซึ่งทำให้ผู้ผลิตหุ่นยนต์สามารถบูรณาการเครือข่ายประสาทเทียมได้อย่างรวดเร็ว ทำให้หุ่นยนต์ขนาดเล็กและราคาถูกที่สุดสามารถทำงานต่าง ๆ ได้ เช่นการจดจำใบหน้าและการระบุวัตถุ[ 121 ]
การเติบโตของหุ่นยนต์ในช่วงทศวรรษ 2010 เกิดขึ้นพร้อมกับการเพิ่มขึ้นของพลังของ ขบวนการ ซอฟต์แวร์โอเพนซอร์สโดยหลายบริษัทเสนอการเข้าถึงซอฟต์แวร์ปัญญาประดิษฐ์ (AI) ของตนโดยไม่เสียค่าใช้จ่าย ฮาร์ดแวร์โอเพนซอร์ส เช่นคอมพิวเตอร์บอร์ดเดี่ยวขนาดกะทัดรัดตระกูลRaspberry Piและไมโครคอนโทรลเลอร์ตระกูลArduinoรวมถึงชิ้นส่วนอิเล็กทรอนิกส์ต่างๆ เช่นเซ็นเซอร์และมอเตอร์มีประสิทธิภาพเพิ่มขึ้นอย่างมากและราคาลดลงในช่วงทศวรรษ 2010 เมื่อรวมกับการลดลงของต้นทุนเทคนิคการผลิต เช่นการพิมพ์ 3 มิติ ชิ้นส่วนเหล่านี้ช่วยให้ผู้ที่ชื่นชอบงานอดิเรก นักวิจัย และผู้ผลิต สามารถสร้างหุ่นยนต์เฉพาะทางที่มีระดับปัญญาประดิษฐ์สูงได้อย่างรวดเร็วและราคาถูก รวมถึงแบ่งปันการออกแบบของตนกับผู้อื่นทั่วโลก
รถยนต์ขับเคลื่อนอัตโนมัติเปลี่ยนสถานะจากเชิงคาดการณ์ไปสู่การเกิดขึ้นจริงในช่วงทศวรรษนั้น ในช่วงปลายทศวรรษ รถยนต์ใหม่ส่วนใหญ่ถูกผลิตขึ้นโดยมีระบบย่อยหุ่นยนต์ที่สามารถเตือนผู้ขับขี่เกี่ยวกับอันตรายต่างๆ เช่น รถยนต์ที่อยู่ใกล้เคียง หรือการเบี่ยงเลนที่อาจเกิดขึ้น[ 122 ]ในปี 2014 รถยนต์ Tesla รุ่นใหม่ ได้รับการติดตั้งฮาร์ดแวร์คอมพิวเตอร์ที่จำเป็นเพื่อรองรับระบบซอฟต์แวร์ขับเคลื่อนอัตโนมัติอย่างเต็มรูปแบบในที่สุด โดยมีระบบซอฟต์แวร์อัตโนมัติที่เพิ่มขึ้นเรื่อยๆ มาเป็นการอัปเดตในช่วงหลายปีต่อมา[ 123 ]ในช่วงปลายทศวรรษ การขับขี่อัตโนมัติเป็นไปได้บนทางหลวงขนาดใหญ่ แต่ยังคงต้องมีการกำกับดูแลจากมนุษย์[ 124 ]
การเติบโตของความสามารถของหุ่นยนต์ในช่วงทศวรรษที่ผ่านมาเกิดขึ้นควบคู่ไปกับการรวมศูนย์อำนาจทางเศรษฐกิจไว้ในมือของบริษัทเทคโนโลยีข้ามชาติขนาดใหญ่ซึ่งก่อให้เกิดความกังวลว่าความสามารถของหุ่นยนต์เหล่านี้อาจถูกบริษัทที่นำหุ่นยนต์เหล่านี้มาให้บริการแก่ผู้บริโภคนำไปใช้ในทาง ที่ผิด การ ที่Amazon เข้าซื้อ Roombaทำให้เกิดความกังวลจากผู้สนับสนุนความเป็นส่วนตัวของข้อมูลว่า ข้อมูลเกี่ยวกับภายในบ้านของผู้ใช้ที่รวบรวมโดยเซ็นเซอร์และกล้องของหุ่นยนต์อาจถูกจัดเก็บ แบ่งปัน และวิเคราะห์โดยไม่ได้รับความยินยอมจากผู้ใช้[ 125 ]ในทำนองเดียวกัน การแพร่หลายของโดรนขนาดเล็กระบบบ้านอัตโนมัติและความสามารถในการจดจำใบหน้าของหุ่นยนต์ ทำให้เกิดความกังวลอย่างมากเกี่ยวกับ การละเมิด สิทธิมนุษยชนรวมถึงข้อกล่าวหาเรื่องการปราบปรามชนกลุ่มน้อยในประเทศจีน[ 126 ]และความกังวลเกี่ยวกับการละเมิดสิทธิความเป็นส่วนตัวโดยหน่วยงานบังคับใช้กฎหมายในสหรัฐอเมริกา[ 127 ]เมื่อระบบหุ่นยนต์แสดงให้เห็นถึงความสามารถในการทำงานมากขึ้นเรื่อยๆ ซึ่งครั้งหนึ่งเคยจำกัดอยู่เฉพาะผู้ปฏิบัติงานที่เป็นมนุษย์นักจริยธรรม หลายคน จึงแสดงความกังวลว่าหุ่นยนต์ที่ทำงานในระบบที่ซับซ้อนอาจไม่มีหลักประกันทางศีลธรรมหรือจริยธรรมที่จำเป็นต่อการรับรองความปลอดภัยสาธารณะ[ 128 ]
ตลอดช่วงทศวรรษ 2010 มนุษย์ยังคงตรวจสอบธรรมชาติของความสัมพันธ์กับหุ่นยนต์ โดยมีแนวโน้มบ่งชี้ถึงความเชื่อทั่วไปว่าหุ่นยนต์เป็นหรือจะกลายเป็นสิ่งมีชีวิตที่มีสติสัมปชัญญะที่สมควรได้รับสิทธิ และอาจเป็นพันธมิตรหรือคู่แข่งของมนุษย์ ในวันที่ 25 ตุลาคม 2017 ในการประชุมสุดยอดการลงทุนแห่งอนาคตที่ริยาดหุ่นยนต์ชื่อโซเฟียซึ่งถูกเรียกด้วยสรรพนามเพศหญิง ได้รับ สัญชาติ ซาอุดีอาระเบียกลายเป็นหุ่นยนต์ตัวแรกที่มีสัญชาติ[ 129 ] [ 130 ]เรื่องนี้ก่อให้เกิดข้อถกเถียง เนื่องจากไม่ชัดเจนว่านี่หมายความว่าโซเฟียสามารถลงคะแนนเสียงหรือแต่งงานได้หรือไม่ หรือการปิดระบบโดยเจตนาจะถือเป็นการฆาตกรรมหรือไม่ นอกจากนี้ยังเป็นเรื่องที่ถกเถียงกันเมื่อพิจารณาว่าผู้หญิงชาวซาอุดีอาระเบียมีสิทธิน้อยมาก[ 131 ] [ 132 ]ผลงานศิลปะยอดนิยมในทศวรรษ 2010 เช่น การกลับมาของWestworld ทาง HBO ได้ส่งเสริมความเห็นอกเห็นใจต่อหุ่นยนต์ และสำรวจคำถามเกี่ยวกับความเป็นมนุษย์และจิตสำนึก[ 133 ]
เมื่อสิ้นสุดทศวรรษ หุ่นยนต์เชิงพาณิชย์และอุตสาหกรรมได้ถูกนำมาใช้อย่างแพร่หลาย โดยทำงานได้ถูกกว่าหรือมีความแม่นยำและน่าเชื่อถือมากกว่ามนุษย์ และถูกนำมาใช้อย่างกว้างขวางในการผลิต การประกอบและการบรรจุ การขนส่ง การสำรวจโลกและอวกาศ การผ่าตัด อาวุธ การวิจัยในห้องปฏิบัติการ และการผลิตสินค้าอุปโภคบริโภคและอุตสาหกรรมจำนวนมาก[ 134 ]การเติบโตของการใช้หุ่นยนต์ในอุตสาหกรรม ตลอดจนในภาคบริการและในงานสร้างสรรค์หรืองานที่มีทักษะสูงซึ่งเดิมจำกัดเฉพาะมนุษย์ นำไปสู่ความกังวลในช่วงปลายทศวรรษเกี่ยวกับการว่างงานทางเทคโนโลยี จำนวน มาก [ 135 ]
เมื่อถึงปลายทศวรรษนั้น วิทยาการหุ่นยนต์เริ่มมีความก้าวหน้าในระดับนาโนเทคโนโลยี ในปี 2019 วิศวกรที่มหาวิทยาลัยเพนซิลเวเนียสร้างนาโนบอทนับล้านตัวในเวลาเพียงไม่กี่สัปดาห์ โดยใช้เทคโนโลยีที่ยืมมาจากอุตสาหกรรมเซมิคอนดักเตอร์ที่พัฒนาแล้ว หุ่นยนต์ขนาดจิ๋วเหล่านี้ มีขนาดเล็กพอที่จะฉีดเข้าไปในร่างกายมนุษย์และควบคุมแบบไร้สายได้ ซึ่งในอนาคตอาจสามารถส่งยาและทำการผ่าตัดได้ ก่อให้เกิดการปฏิวัติวงการแพทย์และสุขภาพ[ 136 ]
ดูเพิ่มเติม
- ประวัติศาสตร์ของปัญญาประดิษฐ์
- ประวัติศาสตร์ของฮาร์ดแวร์คอมพิวเตอร์
- ประวัติศาสตร์ของการผลิตจำนวนมาก
- การควบคุมเชิงตัวเลข
หมายเหตุ
- ↑ "คูไร คริสไซ" . โครงการเที่ยย. สืบค้นเมื่อ5 กรกฎาคม 2022 .
- ^ Deborah Levine Gera (2003). แนวคิดกรีกโบราณเกี่ยวกับการพูด ภาษา และอารยธรรมสำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด ISBN 978-0-19-925616-7สืบค้นข้อมูลเมื่อ วัน ที่31 ธันวาคม 2550
- ^ Ronnie Littlejohn; Jeffrey Dippmann (2011). Riding the Wind with Liezi: New Perspectives on the Daoist Classic . SUNY Press. หน้า 195–196 . ISBN 978-1-4384-3455-1.
- ^ a b Ronnie Littlejohn; Jeffrey Dippmann (2011). Riding the Wind with Liezi: New Perspectives on the Daoist Classic . SUNY Press. หน้า 196. ISBN 978-1-4384-3455-1.
- ^ Ronnie Littlejohn; Jeffrey Dippmann (2011). Riding the Wind with Liezi: New Perspectives on the Daoist Classic . SUNY Press. หน้า 195. ISBN 978-1-4384-3455-1.
- ^ Ronnie Littlejohn; Jeffrey Dippmann (2011). Riding the Wind with Liezi: New Perspectives on the Daoist Classic . SUNY Press. หน้า 194–195 . ISBN 978-1-4384-3455-1.
- ^ Ronnie Littlejohn; Jeffrey Dippmann (2011). Riding the Wind with Liezi: New Perspectives on the Daoist Classic . SUNY Press. หน้า 197. ISBN 978-1-4384-3455-1.
- ^ สตรอง, เจ.เอส. (2007). พระธาตุของพระพุทธเจ้า . สำนักพิมพ์มหาวิทยาลัยพรินซ์ตัน . หน้า 133–134 . ISBN 978-0-691-11764-5.
- ^ Adrienne Mayor (2018). Gods and Robots: Myths, Machines, and Ancient Dreams of Technology . Princeton University Press. หน้า 205–206 . ISBN 978-0-691-18544-6.
- ^ a b William Godwin (1876). "ชีวประวัติของเนโครแมนเซอร์" .
- ↑ Haug, " Walewein as a postclassical การทดลอง", หน้า 23–4;โรมัน ฟาน วาเลไวน์ , เอ็ด. GA van Es, De Jeeste van Walewein และ Schaakbord van Penninc และ Pieter Vostaert (ซโวลเลอ, 1957): 877 ff และ 3526 ff
- ↑ดูเพิ่มเติมที่ พี. ซัลลิแวน, "ออโตมาตายุคกลาง: 'ห้องสวยงาม' ใน Roman de Troieของเบอโนต์ "โรมานซ์ศึกษา 6 (1985): 1–20
- ^เคอร์รี, อดัม (1999). "ประวัติศาสตร์ของหุ่นยนต์" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 18 กรกฎาคม 2549 . สืบค้นเมื่อ10 กันยายน 2550 .
- ^เควิน ลาแกรนเดอร์ (2013). แอนดรอยด์และเครือข่ายอัจฉริยะในวรรณกรรมและวัฒนธรรมยุคต้นสมัยใหม่: ทาสเทียม . สำนักพิมพ์รูทเลดจ์. หน้า 24. ISBN 978-0-415-63121-1.
- ^เควิน ลาแกรนเดอร์ (2013). แอนดรอยด์และเครือข่ายอัจฉริยะในวรรณกรรมและวัฒนธรรมยุคต้นสมัยใหม่: ทาสเทียม . สำนักพิมพ์รูทเลดจ์. หน้า 29. ISBN 978-0-415-63121-1.
- ^ Safran, Linda (1998). สวรรค์บนโลก: ศิลปะและศาสนจักรในไบแซนเทียม . พิตต์สเบิร์ก: สำนักพิมพ์เพนน์สเตท. หน้า 30. ISBN 0-271-01670-1.บันทึกคำอธิบายของ Liutprand
- ^ "นาฬิกาของซู่ซง: 1088" สืบค้นเมื่อ26 สิงหาคม 2550
- ^ a b c Hemal, Ashok K.; Menon, Mani (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 7. ISBN 978-3-319-20645-5.
- ^ a b Hemal, Ashok K.; Menon, Mani (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 8. ISBN 978-3-319-20645-5.
- ^เควิน ลาแกรนเดอร์ (2013). แอนดรอยด์และเครือข่ายอัจฉริยะในวรรณกรรมและวัฒนธรรมยุคต้นสมัยใหม่: ทาสเทียม . สำนักพิมพ์รูทเลดจ์. หน้า 30. ISBN 978-0-415-63121-1.
- ^อัล-จาซารี (ศิลปินอิสลาม) ,สารานุกรมบริแทนนิกา
- ^ Donald Hill (1996),ประวัติศาสตร์วิศวกรรมในยุคคลาสสิกและยุคกลาง , Routledge , หน้า 224
- ^ การค้นพบโบราณ ตอนที่ 12: เครื่องจักรแห่งตะวันออก , ประวัติศาสตร์ , 24 กรกฎาคม 2551 , เก็บถาวรจากต้นฉบับเมื่อ 12 ธันวาคม 2564 , เรียกดูเมื่อ6 กันยายน 2551
- ^ Rosheim, Mark E. (1994), Robot Evolution: The Development of Anthrobotics , John Wiley & Sons, หน้า 9, ISBN 978-0-471-02622-8
- ^ "articles58" . 29 มิถุนายน 2550. เก็บถาวรจากต้นฉบับเมื่อ 29 มิถุนายน 2550. เรียกดูเมื่อ18 มิถุนายน 2562 .
- ^ Rosheim, Mark E. (1994), Robot Evolution: The Development of Anthrobotics , John Wiley & Sons, หน้า 9, ISBN 978-0-471-02622-8
- ^เควิน ลาแกรนเดอร์ (2013). แอนดรอยด์และเครือข่ายอัจฉริยะในวรรณกรรมและวัฒนธรรมยุคต้นสมัยใหม่: ทาสเทียม . สำนักพิมพ์รูทเลดจ์. หน้า 31. ISBN 978-0-415-63121-1.
- ^ a bเควิน ลาแกรนเดอร์ (2013). แอนดรอยด์และเครือข่ายอัจฉริยะในวรรณกรรมและวัฒนธรรมยุคต้นสมัยใหม่: ทาสเทียม . รูทเลดจ์. หน้า 33. ISBN 978-0-415-63121-1.
- ^ Truitt, Elly R. "สวนแห่งความสุขบนโลก: Mahaut แห่ง Artois และหุ่นยนต์อัตโนมัติที่ Hesdin" . Iowa Research Online, มหาวิทยาลัยไอโอวา. เก็บถาวรจากต้นฉบับเมื่อวันที่ 3 มิถุนายน 2013 . สืบค้นเมื่อ22 มิถุนายน 2018 .
- อรรถ เป็นขมอแรน, ไมเคิล อี. (ธันวาคม 2549) "หุ่นยนต์ดาวินชี" วารสาร Endourology . 20 (12): 986– 90. ดอย : 10.1089/end.2006.20.986 . PMID 17206888 .
- ^ a b "เซอร์ ริชาร์ด อาร์คไรท์ (1732–1792)" . BBC . สืบค้นเมื่อ18 มีนาคม 2008 .
- ^ a b c Ashok K. Hemal; Mani Menon (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 6. ISBN 978-3-319-20645-5.
- ^ Ashok K. Hemal; Mani Menon (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 5. ISBN 978-3-319-20645-5.
- ^อาร์มานด์ แมทเทลาร์ต (1996). การประดิษฐ์การสื่อสาร . สำนักพิมพ์มหาวิทยาลัยมินนิโซตา. หน้า 23. ISBN 978-0-8166-2697-7.
- ^ TN Hornyak (2006). รักเครื่องจักร: ศิลปะและวิทยาศาสตร์ของหุ่นยนต์ญี่ปุ่น . Kodansha International.
- ^พจนานุกรมภาษาอังกฤษอ็อกซ์ฟอร์ด: robot n2
- ^ Lisa Nocks (2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 55. ISBN 978-0-313-33168-8.
- ^ Gizycki, Jerzy. ประวัติศาสตร์หมากรุก. ลอนดอน: Abbey Library, 1972. พิมพ์.
- ^อเล็กซ์ กู๊ดดี้ (2011). เทคโนโลยี วรรณกรรม และวัฒนธรรม: หัวข้อในวรรณกรรมและวัฒนธรรมศตวรรษที่ 20 และ 21.โพลิตี้. หน้า 136. ISBN 978-0-7456-3954-3.
- ^สาร์การ์ 2006, หน้า 97
- ^ AP Yuste.หอเกียรติยศวิศวกรรมไฟฟ้า. การพัฒนาเบื้องต้นของการควบคุมระยะไกลแบบไร้สาย: Telekino ของ Torres-Quevedo ( pdf) เล่มที่ 96 ฉบับที่ 1 มกราคม 2551 วารสารของ IEEE
- ^ HR Everett, ระบบไร้คนขับในสงครามโลกครั้งที่ 1 และ 2, สำนักพิมพ์ MIT - 2015, หน้า 91-95
- ↑ "1902 – เทเลคิเน (เทเลคิโน) – เลโอนาร์โด ตอร์เรส เกเบโด (สเปน)" . 17 ธันวาคม 2553.
- ^วิลเลียมส์, แอนดรูว์ (16 มีนาคม 2017). ประวัติศาสตร์ของเกมดิจิทัล: พัฒนาการด้านศิลปะ การออกแบบ และปฏิสัมพันธ์ . สำนักพิมพ์ CRC. ISBN 978-1-317-50381-1.
- ^ Brian Randell, จากเครื่องวิเคราะห์เชิงกลไกสู่คอมพิวเตอร์ดิจิทัลอิเล็กทรอนิกส์: ผลงานของ Ludgate, Torres และ Bushวารสารประวัติศาสตร์การคำนวณเล่มที่ 4 ฉบับที่ 4 ตุลาคม 1982
- ^ Hooper & Whyld 1992 หน้า 22. The Oxford Companion to Chess (ฉบับที่ 2). อังกฤษ: สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด. ISBN 0-19-866164-9.
- ↑แอล. ตอร์เรส เกเบโด. Ensayos sobre Automática - คำจำกัดความของ Su ส่วนขยาย teórica de sus aplicaciones, Revista de la Academia de Ciencias Exacta, Revista 12, pp.391-418, 1914.
- ↑ตอร์เรส เกเบโด. ล. (1915) "Essais sur l'Automatique - Sa définition. Etendue théorique de ses applications" , Revue Génerale des Sciences Pures et Appliquées , vol. 2, หน้า 601–611.
- ^บี. แรนเดลล์.บทความว่าด้วยระบบอัตโนมัติ,ที่มาของคอมพิวเตอร์ดิจิทัล, หน้า 89-107, 1982.
- ^ McCorduck, Pamela (2004), Machines Who Think (ฉบับที่ 2), Natick, MA: AK Peters, Ltd., หน้า 59–60 , ISBN 978-1-56881-205-2, OCLC 52197627.
- ^ Ashok K. Hemal; Mani Menon (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 4. ISBN 978-3-319-20645-5.
- ^ "RUR (หุ่นยนต์อเนกประสงค์ของรอสซัม)" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 26 สิงหาคม 2550 . เรียกดูเมื่อวันที่ 26 สิงหาคม 2550 .
- ^อสิมอฟ, ไอแซค; เฟรนเคล, คาเรน (1985). หุ่นยนต์: เครื่องจักรในภาพลักษณ์ของมนุษย์ . นิวยอร์ก: ฮาร์โมนี บุ๊คส์. หน้า 13.
- ^ "ประวัติศาสตร์อันซับซ้อนของระบบอัตโนมัติ" . newatlas.com . 10 พฤศจิกายน 2008 . สืบค้นเมื่อ28 มกราคม 2019 .
- ^ "MegaGiantRobotics" . สืบค้นเมื่อ26 สิงหาคม 2550 .
- ^ "AH Reffell & Eric Robot (1928)" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 11 พฤศจิกายน 2013 . เรียกดูเมื่อวันที่ 11 พฤศจิกายน 2013 .
- ^ Lisa Nocks (2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 59–60 . ISBN 978-0-313-33168-8.
- ^ "ความฝันของหุ่นยนต์: เรื่องราวแปลกประหลาดของการแสวงหาของชายคนหนึ่งเพื่อสร้างเพื่อนหุ่นยนต์ในวัยเด็กของเขาขึ้นมาใหม่"เดอะคลีฟแลนด์ ฟรี ไทมส์เก็บถาวรจากต้นฉบับเมื่อวันที่ 21 พฤศจิกายน 2008 เรียกดูเมื่อวันที่ 25 กันยายน 2008
- ^ Scott Schaut (2006). หุ่นยนต์ของเวสติงเฮาส์: 1924-ปัจจุบัน . พิพิธภัณฑ์อนุสรณ์แมนส์ฟิลด์. ISBN 0-9785844-1-4.
- ^ "หุ่นยนต์ตัวแรกของญี่ปุ่น" . Yomiuri.co.jp . สืบค้นเมื่อ8 กุมภาพันธ์ 2014 .
- ^อาร์มิน คริชนัน (2016). หุ่นยนต์สังหาร: ความถูกต้องตามกฎหมายและจริยธรรมของอาวุธไร้คนขับ . สำนักพิมพ์ Routledge. หน้า 15. ISBN 978-1-317-10912-9.
- ^ Lisa Nocks ( 2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 63. ISBN 978-0-313-33168-8.
- ^ "หุ่นยนต์, น." พจนานุกรมภาษาอังกฤษฉบับออกซ์ฟอร์ด สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ดสืบค้นเมื่อ30 เมษายน 2026
- ^ไอแซค อสิมอฟ (พฤษภาคม 1941). "คนโกหก!" . นิยายวิทยาศาสตร์สุดอัศจรรย์ . เล่ม 27, ฉบับที่ 3. หน้า 43–55 . สืบค้นเมื่อ30 เมษายน 2026 .
- ^ไอแซค อสิมอฟ (มีนาคม 1942). "Runaround" . Astounding Science-Fiction . เล่ม 29, ฉบับที่ 1. หน้า 94–103 . สืบค้นเมื่อ30 เมษายน 2026 .
- ^ Lisa Nocks ( 2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 60. ISBN 978-0-313-33168-8.
- ^ Lisa Nocks ( 2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 61. ISBN 978-0-313-33168-8.
- ^ Walter, W. Grey (1953). สมองที่มีชีวิต . สหราชอาณาจักร: Gerald Duckworth & Co. LTD.
- ^โอเวน ฮอลแลนด์. "คลังข้อมูลออนไลน์ของเกรย์ วอลเตอร์" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 9 ตุลาคม 2551 . เรียกดูเมื่อวันที่ 25 กันยายน 2551 .
- ^ "จอร์จ เดโวล ได้รับการขึ้นทะเบียนในหอเกียรติยศนักประดิษฐ์แห่งชาติ "
- ^ Waurzyniak, Patrick (กรกฎาคม 2549). "ปรมาจารย์แห่งการผลิต: Joseph F. Engelberger" . สมาคมวิศวกรการผลิต . 137 (1). เก็บถาวรจากต้นฉบับเมื่อวันที่ 9 พฤศจิกายน 2554 . สืบค้นเมื่อ25 กันยายน 2551 .
- ^ Ashok K. Hemal; Mani Menon (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 8–9 . ISBN 978-3-319-20645-5.
- ^ Lisa Nocks (2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 64. ISBN 978-0-313-33168-8.
- ^ Lisa Nocks (2006). The Robot: The Life Story of a Technology . Greenwood Publishing Group. หน้า 65. ISBN 978-0-313-33168-8.
- ^ "หอเกียรติยศหุ่นยนต์ – ยูนิเมท"มหาวิทยาลัยคาร์เนกีเมลลอน เก็บถาวรจากต้นฉบับเมื่อวันที่ 26 กันยายน 2011 เรียกดูเมื่อวันที่ 28 สิงหาคม 2008
- ^ Mickle, Paul. "1961: มองอนาคตของระบบอัตโนมัติ" , The Trentonian . เข้าถึงเมื่อ 11 สิงหาคม 2011.
- ^ "ผู้ได้รับการแต่งตั้งเข้าสู่หอเกียรติยศนักประดิษฐ์แห่งชาติ ปี 2011" Invent Now. เก็บถาวรจากต้นฉบับเมื่อวันที่ 4 พฤศจิกายน 2014 เรียกดูเมื่อวันที่ 18 มีนาคม 2011
- ^ a b c d e f "พิพิธภัณฑ์ประวัติศาสตร์คอมพิวเตอร์ – ลำดับเหตุการณ์ทางประวัติศาสตร์ของคอมพิวเตอร์" สืบค้นเมื่อ 30 สิงหาคม 2550
- ^ Ashok K. Hemal; Mani Menon (2018). หุ่นยนต์ในการผ่าตัดระบบทางเดินปัสสาวะและอวัยวะสืบพันธุ์ . Springer. หน้า 9. ISBN 978-3-319-20645-5.
- ^อาร์มิน คริชนัน (2016). หุ่นยนต์สังหาร: ความถูกต้องตามกฎหมายและจริยธรรมของอาวุธไร้คนขับ . สำนักพิมพ์ Routledge. หน้า 19. ISBN 978-1-317-10912-9.
- ^ a b Armin Krishnan (2016). Killer Robots: Legality and Ethicality of Autonomous Weapons . Routledge. หน้า 20. ISBN 978-1-317-10912-9.
- ^ วิทยาการหุ่นยนต์และเมคาทรอนิกส์: รายงานการประชุมสัมมนาวิชาการนานาชาติ IFToMM ครั้งที่ 4 ว่าด้วยวิทยาการหุ่นยนต์และเมคาทรอนิกส์หน้า 66
- ^ "ประวัติของหุ่นยนต์ฮิวมานอยด์ -WABOT- "
- ^ หุ่นยนต์: จากนิยายวิทยาศาสตร์สู่การปฏิวัติทางเทคโนโลยีหน้า 130
- ^ คู่มือการสร้างแบบจำลองมนุษย์ดิจิทัล: งานวิจัยด้านสรีรศาสตร์ประยุกต์และวิศวกรรมปัจจัยมนุษย์บทที่ 3 หน้า 1-2
- ^ "หุ่นยนต์เฟรดดี้แห่งเอดินบะระ" สืบค้นเมื่อ 31 สิงหาคม 2550
- ^ "หุ่นยนต์อุตสาหกรรมตัวแรกที่มีแกนขับเคลื่อนด้วยระบบไฟฟ้าและกลไก 6 แกน FAMULUS ของ KUKA" สืบค้นเมื่อ 17 พฤษภาคม 2551
- ^ "1960 - รูดี้ หุ่นยนต์ - ไมเคิล ฟรีแมน (ชาวอเมริกัน)" . cyberneticzoo.com . 13 กันยายน 2010 . สืบค้นเมื่อ23 พฤษภาคม 2019 .
- ^ นักอนาคตศาสตร์ . สมาคมอนาคตโลก. 1978. หน้า 152, 357, 359.
- ^คอลลิแกน, ดักลาส (30 กรกฎาคม 1979). หุ่นยนต์กำลังมา . นิตยสารนิวยอร์ก.
- ^ "หอเกียรติยศหุ่นยนต์: AIBO" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 6 กันยายน 2550 . เรียกดูเมื่อวันที่ 31 สิงหาคม 2550 .
- ^ "สถาบันหุ่นยนต์: เกี่ยวกับสถาบันหุ่นยนต์" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 9 พฤษภาคม 2551 . เรียกดูเมื่อวันที่ 1 กันยายน 2550 .
- ^ "Cobot - หุ่นยนต์ร่วมปฏิบัติงาน" . peshkin.mech.northwestern.edu .
- ^ "คอลเลกชันทาเคโอะ คานาเดะ: วิสัยทัศน์ด้านหุ่น ยนต์: แขนหุ่นยนต์ขับเคลื่อนโดยตรง" สืบค้นเมื่อ31 สิงหาคม 2550
- ^ "2history" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 12 ตุลาคม 2550 . เรียกดูเมื่อวันที่ 31 สิงหาคม 2550 .
- ^ "P3" . ฮอนด้าทั่วโลก. เก็บถาวรจากต้นฉบับเมื่อวันที่ 12 ตุลาคม 2550. เรียกดูเมื่อวันที่ 1 กันยายน 2550 .
- ^ Angle, Colin (1989). Genghis หุ่นยนต์เดินอัตโนมัติหกขา (วิทยานิพนธ์). สถาบันเทคโนโลยีแมสซาชูเซตส์. hdl : 1721.1/14531 .
- ^ "เร็ว ราคาถูก และควบคุมไม่ได้: การรุกรานระบบสุริยะของหุ่นยนต์" (PDF) สืบค้นเมื่อ 1 กันยายน 2550
- ^ Habib, Maki K. (2014). คู่มือการวิจัยเกี่ยวกับความก้าวหน้าในด้านหุ่นยนต์และเมคาทรอนิกส์ IGI Global. หน้า 253. ISBN 978-1-4666-7388-5.
- ^ "มีบางอย่างไม่ชอบมาพากลเกี่ยวกับหุ่นยนต์ตัวนี้" สืบค้นเมื่อ 1 กันยายน 2550
- ^ "ASIMO" . ฮอนด้า เวิลด์ไวด์. สืบค้นเมื่อ20 กรกฎาคม 2553 .
- ^ "หอเกียรติยศหุ่นยนต์: ยานสำรวจดาวอังคารโซเจอร์เนอร์"เก็บถาวรจากต้นฉบับเมื่อวันที่ 7 ตุลาคม 2550 เรียกดูเมื่อวันที่ 1 กันยายน 2550
- ^ "หุ่นยนต์ฮิวมานอยด์ของฮอนด้า" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 11 กันยายน 2550 . เรียกดูเมื่อวันที่ 10 กันยายน 2550 .
- ^ "AIBOaddict! เกี่ยวกับเรา" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 12 ตุลาคม 2550 . เรียกดูเมื่อวันที่ 10 กันยายน 2550 .
- ^ "ASIMO" . Honda Worldwide – Technology. เก็บถาวรจากต้นฉบับเมื่อวันที่ 30 กันยายน 2550 . เรียกดูเมื่อวันที่ 10 กันยายน 2550 .
- ^วิลเลียมส์, มาร์ติน (21 พฤศจิกายน 2000). "เทคโนโลยี – โซนี่เปิดตัวหุ่นยนต์ฮิวมานอยด์ต้นแบบ – 22 พฤศจิกายน 2000" . CNN. เก็บถาวรจากต้นฉบับเมื่อ 12 ตุลาคม 2007 . สืบค้นเมื่อ12 กันยายน 2007 .
- ^ "นาซา – แขนหุ่นยนต์แคนาดา 2 และระบบบริการเคลื่อนที่"เก็บถาวรจากต้นฉบับเมื่อวันที่ 23 มีนาคม 2552 เรียกดูเมื่อวันที่ 12 กันยายน 2550
- ^ "โดร นGlobal Hawk บินข้ามมหาสมุทรแปซิฟิกโดยไม่มีคนขับ" สืบค้นเมื่อ12 กันยายน 2550
- ^ "แม่บ้านสั่งทำ" . ไทม์ . 14 กันยายน 2002. เก็บถาวรจากต้นฉบับเมื่อ 13 สิงหาคม 2007 . สืบค้นเมื่อ15 กันยายน 2007 .
- ^เบรเซล, ซินเธีย. "หุ่นยนต์ที่เลียนแบบมนุษย์" . MIT Media Lab . สืบค้นเมื่อ8 ตุลาคม 2024 .
- ^ Breazeal, Cynthia; Brooks, Rodney (28 เมษายน 2548), "อารมณ์ของหุ่นยนต์"ใน Fellous, Jean-Marc; Arbib, Michael A. (บรรณาธิการ), ใครต้องการอารมณ์?สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด หน้า 271–310 , doi : 10.1093/acprof:oso/9780195166194.003.0010 , ISBN 978-0-19-516619-4สืบค้นข้อมูลเมื่อวันที่ 8 ตุลาคม 2567
- ^ "บล็อกที่จำลองตัวเองได้จากมหาวิทยาลัยคอร์เนลล์" YouTube 2 กุมภาพันธ์ 2009 เก็บถาวรจากต้นฉบับเมื่อ 12 ธันวาคม 2021 เรียกดูเมื่อ 24 มิถุนายน 2020
- ^ "รายงานสถานะภารกิจยานสำรวจดาวอังคาร Opportunity" สืบค้นเมื่อ 31 สิงหาคม 2561
- ^ "หุ่นยนต์ล้มเหลวในการทำภารกิจ Grand Challenge ให้สำเร็จ – 14 มีนาคม 2547" . CNN. 6 พฤษภาคม 2547. สืบค้นเมื่อ12 กันยายน 2550 .
- ↑ "ฮอนด้าเปิดตัวอาซิโมใหม่" . ฮอนด้าทั่วโลก 13 ธันวาคม 2548 . สืบค้นเมื่อ15 กันยายน 2550 .
{{cite web}}: CS1 maint: บริการเก็บถาวรที่เลิกใช้แล้ว ( ลิงก์ ) - ^ "Cornell CCSL: Robotics Self Modeling" . สืบค้นเมื่อ15 กันยายน 2550 .
- ↑ "โรโบนอท | นาซา" . NASA.gov. 9 ธันวาคม 2556. เก็บถาวรจากต้นฉบับเมื่อ 6 พฤศจิกายน 2553 . สืบค้นเมื่อ8 กุมภาพันธ์ 2014 .
- ^สไนเดอร์, ไมค์. "วิดีโอหุ่นยนต์ล่าสุดของ Boston Dynamics แสดงให้เห็นว่าหุ่นยนต์ฮิวมานอยด์สูง 5 ฟุตของพวกเขามีลีลาเหมือนซิโมน ไบล์ส" . USA TODAY . สืบค้นเมื่อ4 ตุลาคม 2022 .
- " หลายเดือนหลังจากการเปิดตัว DJI Mavic 3 เป็นโดรนที่ดีขึ้นมาก" Engadget 30มิถุนายน 2022 สืบค้นเมื่อ4 ตุลาคม 2022
- ^ "Amazon Prime Air เตรียมพร้อมสำหรับการจัดส่งด้วยโดรน" . เกี่ยวกับ Amazon สหรัฐอเมริกา . 13 มิถุนายน 2022 . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ "TensorFlow" . TensorFlow . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ "ระบบเตือนการออกนอกเลนและระบบช่วยรักษาเลน" . Consumer Reports . 9 พฤษภาคม 2022 . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ "คลังข้อมูลระบบขับเคลื่อนอัตโนมัติของ Tesla" . Electrek . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ "เจ้าของรถเทสลาหลาย ราย รายงาน ว่ารถที่ใช้ระบบขับเคลื่อนอัตโนมัติหยุดกลางทางหลวงโดยไม่มีสาเหตุ" เดอะการ์เดียนสำนักข่าวเอพี 3 มิถุนายน 2022 สืบค้นเมื่อ4 ตุลาคม 2022
- ^จอห์นสัน, คาริ. "ข้อตกลง iRobot จะทำให้ Amazon Maps เข้าถึงบ้านเรือนนับล้านหลัง" . Wired . ISSN 1059-1028 . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ "ทดสอบซอฟต์แวร์ตรวจจับอารมณ์ด้วย AI กับชาวอุยกูร์"บีบีซี นิวส์ 25 พฤษภาคม 2021 สืบค้นเมื่อ4 ตุลาคม 2022
- ^ Guariglia, Jason Kelley และ Matthew (15 กรกฎาคม 2022). "Ring เปิดเผยว่าพวกเขาส่งวิดีโอให้ตำรวจโดยไม่ได้รับความยินยอมจากผู้ใช้หรือไม่มีหมายศาล" . Electronic Frontier Foundation . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^ Maxmen, Amy (24 ตุลาคม 2018). "ภาวะกลืนไม่เข้าคายไม่ออกของรถยนต์ขับเคลื่อนอัตโนมัติเผยให้เห็นว่าทางเลือกทางศีลธรรมไม่ได้เป็นสากล" Nature . 562 ( 7728): 469– 470. Bibcode : 2018Natur.562..469M . doi : 10.1038/d41586-018-07135-0 . PMID 30356197 . S2CID 53023323 .
- ^ "ซาอุดีอาระเบียให้สัญชาติแก่หุ่นยนต์ที่ไม่ใช่ชาวมุสลิมและพูดภาษาอังกฤษได้"นิวส์วีค 26 ตุลาคม 2017
- ^ " ซาอุดีอาระเบียมอบสัญชาติให้หุ่นยนต์ชื่อโซเฟีย" TechCrunch 26ตุลาคม 2017 สืบค้นเมื่อ27 ตุลาคม 2016
- ^ "ซาอุดีอาระเบียก้าวไปสู่อนาคตอันน่าหวาดหวั่นด้วยการมอบสัญชาติให้หุ่นยนต์" AV Club 26 ตุลาคม 2017 สืบค้นเมื่อ28 ตุลาคม 2017
- ^ "ซาอุดีอาระเบียถูกวิพากษ์วิจารณ์ที่ให้สัญชาติแก่หุ่นยนต์เพศหญิง ในขณะที่จำกัดสิทธิสตรี" . ABC News . สืบค้นเมื่อ28 ตุลาคม 2017 .
- ^ "บทวิจารณ์ Westworld – การผสมผสานที่ลงตัวระหว่างคาวบอยหุ่นยนต์และโลกดิสโทเปียขององค์กรจาก HBO"เดอะการ์เดียน 5 ตุลาคม 2016 สืบค้นเมื่อ4 ตุลาคม 2022
- ^ "เกี่ยวกับเรา" . เก็บถาวรจากต้นฉบับเมื่อวันที่ 9 มกราคม 2557
- ^ Douglas, Jacob (7 พฤศจิกายน 2019). "คนงานชาวอเมริกันเหล่านี้กลัวที่สุดว่า AI จะแย่งงานของพวกเขา" . CNBC . สืบค้นเมื่อ4 ตุลาคม 2022 .
- ^คาร์เน, นิค (8 มีนาคม 2019). "นักวิจัยสร้างหุ่นยนต์ขนาดจิ๋วหนึ่งล้านตัว" . นิตยสารคอสมอส . เก็บถาวรจากต้นฉบับเมื่อ 8 มีนาคม 2019 . สืบค้นเมื่อ8 มีนาคม 2019 .
อ่านเพิ่มเติม
- Balafrej, Lamia (2022). "ทาสอัตโนมัติ ภาพที่คลุมเครือ และเครื่องจักรไร้ประสิทธิภาพในสารบบศิลปะเชิงกลของอัล-จาซารี ค.ศ. 1206" . 21: การสอบสวนเกี่ยวกับศิลปะ ประวัติศาสตร์ และทัศนศิลป์ . 3 (4): 737– 774. doi : 10.11588/xxi.2022.4.91685 . ISSN 2701-1569 .
- บอมการ์ตเนอร์, เอ็มมานูเอล. "Le temps des อัตโนมัติ" ในLe Nombre du temps en hommage à Paul Zumthor ปารีส: แชมป์ 1988 หน้า 15–21
- Brett, G. "หุ่นยนต์ใน 'บัลลังก์ของโซโลมอน' สมัยไบแซนไทน์" Speculum 29 (1954): 477–87
- Glaser, Horst Albert และ Rossbach, Sabine: มนุษย์เทียม, Frankfurt/M., Bern, New York 2011 "มนุษย์เทียม ประวัติศาสตร์อันน่าเศร้า", อีบุ๊ก "มนุษย์เทียม ประวัติศาสตร์ที่แท้จริงของหุ่นยนต์ แอนดรอยด์ รีพลิแคนท์ ไซบอร์ก โคลน และอื่นๆ"
- ซัลลิแวน, พี. "ออโตเมตายุคกลาง: 'ห้องสวยงาม' ในRoman de Troieของเบอโนต์ " โรแมนติกศึกษา 6 (1985) หน้า 1–20.
- ประวัติของหุ่นยนต์ใน 10 นาทีเก็บถาวรเมื่อวันที่ 20 ตุลาคม 2022 ที่Wayback Machine
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ประวัติศาสตร์ของหุ่นยนต์
ประวัติศาสตร์ ของหุ่นยนต์ มีจุดเริ่มต้นใน โลกยุคโบราณ ในช่วง การปฏิวัติอุตสาหกรรม มนุษย์ได้พัฒนา ความสามารถ ด้านวิศวกรรมโครงสร้าง เพื่อควบคุม ไฟฟ้า...
ตำนานยุคแรก
แนวคิดเกี่ยวกับคนรับใช้และสหายเทียมมีมาอย่างน้อยตั้งแต่ตำนานโบราณของ แคดมัส ซึ่งกล่าวกันว่าได้หว่านฟันมังกรที่กลายเป็นทหาร และ พิกมาเลียน ซึ่งรูปปั้น กาลาเทีย มีชีวิตขึ้นมา ตำนานโบราณหลายเรื่องรวมถึงมนุษย์เทียม เช่น สาวใช้จักรกลที่พูดได้ ( ภาษากรีกโบราณ :...
ออโตมาตา
ในศตวรรษที่ 4 ก่อนคริสต์ศักราช นักคณิตศาสตร์ Archytas แห่ง Tarentum ได้ตั้งสมมติฐานเกี่ยวกับนกกลไกที่เขาเรียกว่า "นกพิราบ" ซึ่งขับเคลื่อนด้วย ไอน้ำ [ 13 ] อริสโตเติล ได้ อ้างอิงถึงการอ้างอิงก่อนหน้านี้ในมหากาพย์อีเลียดของ โฮเมอร์ และ คาดการณ์ไว้ใน...
ประวัติศาสตร์สมัยใหม่
หน้าปกด้านในของหนังสือเรื่อง The Wonderful Wizard of Oz ฉบับพิมพ์ ปี 1900 กอนซาโล บุตรชายของตอร์เรส เกเวโด กำลังแสดง El Ajedrecista ให้กับ นอร์เบิร์ต วีนเนอร์ ในการประชุมไซเบอร์เนติกส์ปารีสปี 1951 [ 38 ] หุ่นยนต์มาเรียจาก ภาพยนตร์เมโทรโพลิส