อ่าน 58 นาที
ระบบกำหนดตำแหน่งทั่วโลก
ระบบ ระบุตำแหน่งทั่วโลก ( GPS ) เป็น ระบบ นำทางแบบไฮเปอร์โบลิก ที่ใช้ดาวเทียม ซึ่งเป็นกรรมสิทธิ์ของ กองทัพอวกาศสหรัฐฯ
ระบบกำหนดตำแหน่งทั่วโลก
| ประเทศต้นกำเนิด | สหรัฐอเมริกา |
|---|---|
| ผู้ปฏิบัติงาน | กองทัพอวกาศสหรัฐฯ ( ภารกิจเดลต้า 31 ) |
| พิมพ์ | ทหาร พลเรือน |
| สถานะ | การดำเนินงาน |
| ความคุ้มครอง | ทั่วโลก |
| ความแม่นยำ | 30–500 ซม. (0.98–16 ฟุต) |
| ขนาดกลุ่มดาว | |
| ดาวเทียมที่ระบุชื่อ | 24 |
| ดาวเทียมที่ใช้งานได้ในปัจจุบัน | 31 ปฏิบัติการ |
| การเปิดตัวครั้งแรก | 22 กุมภาพันธ์ พ.ศ. 2521 |
| การเปิดตัวครั้งล่าสุด | 21 เมษายน 2569 |
| การเปิดตัวทั้งหมด | 82 |
| ลักษณะเฉพาะของวงโคจร | |
| ระบอบการปกครอง | เครื่องบินMEO 6 ลำ |
| ความสูงของวงโคจร | 20,180 กิโลเมตร (12,540 ไมล์) |
| คาบการโคจร | 1/2วันดาราศาสตร์ หรือ 11ชั่วโมง 58นาที |
| ระยะเวลาการกลับเข้าเยี่ยมชม | 1 วันสุริยคติ |
| รายละเอียดอื่นๆ | |
| ค่าใช้จ่าย |
|
| เว็บไซต์ | จีเอสจี.โกฟ |




| ธรณีวิทยา |
|---|
 |
ระบบระบุตำแหน่งทั่วโลก ( GPS ) เป็น ระบบ นำทางแบบไฮเปอร์โบลิกที่ใช้ดาวเทียม ซึ่งเป็นกรรมสิทธิ์ของกองทัพอวกาศสหรัฐฯและดำเนินการโดยภารกิจเดลต้า 31 [ 2 ] [ 3 ] เป็นหนึ่งในระบบดาวเทียมนำทางทั่วโลก (GNSS) ที่ให้ ข้อมูล ตำแหน่งทางภูมิศาสตร์และเวลาแก่เครื่องรับ GPSทุกที่บนหรือใกล้โลกที่คุณภาพสัญญาณเอื้ออำนวย[ 4 ]ไม่จำเป็นต้องให้ผู้ใช้ส่งข้อมูลใดๆ และทำงานได้อย่างอิสระจากการรับสัญญาณโทรศัพท์หรืออินเทอร์เน็ต แม้ว่าเทคโนโลยีเหล่านี้จะสามารถเพิ่มประโยชน์ของข้อมูลตำแหน่ง GPS ได้ก็ตาม[ 5 ]ระบบนี้ให้ความสามารถในการระบุตำแหน่งที่สำคัญแก่ผู้ใช้ทางทหาร พลเรือน และเชิงพาณิชย์ทั่วโลก แม้ว่ารัฐบาลสหรัฐฯ จะเป็นผู้สร้าง ควบคุม และบำรุงรักษา GPS แต่ก็สามารถเข้าถึงได้โดยเสรีสำหรับทุกคนที่มีเครื่องรับ GPS [ 6 ]
ภาพรวม
โครงการ GPS เริ่มต้นโดยกระทรวงกลาโหมของสหรัฐอเมริกาในปี 1973 [ 7 ]ยานอวกาศต้นแบบถูกปล่อยขึ้นสู่อวกาศในปี 1978 และดาวเทียมทั้ง 24 ดวงเริ่มใช้งานได้ในปี 1993 [ 7 ]หลังจากที่เครื่องบิน Korean Air Lines เที่ยวบิน 007ถูกยิงตกเนื่องจากบินเข้าไปในน่านฟ้าของสหภาพโซเวียตโดยไม่ได้ตั้งใจ ประธานาธิบดีโรนัลด์ เรแกนได้ตัดสินใจว่าระบบ GPS จะเปิดให้พลเรือนใช้งานได้ตั้งแต่ปี 1988 [ 8 ]อย่างไรก็ตาม ในช่วงแรก การใช้งานของพลเรือนนี้ถูกจำกัดไว้ที่ความแม่นยำเฉลี่ย 100 เมตร (330 ฟุต) โดยใช้Selective Availability (SA) ซึ่งเป็นข้อผิดพลาดที่จงใจใส่เข้าไปในข้อมูล GPS เพื่อให้เครื่องรับสัญญาณทางทหารสามารถแก้ไขได้
เมื่อการใช้งาน GPS ของพลเรือนเพิ่มมากขึ้น แรงกดดันในการกำจัดข้อผิดพลาดนี้ก็เพิ่มมากขึ้นเช่นกัน ระบบ SA ถูกปิดใช้งานชั่วคราวในช่วงสงครามอ่าวเนื่องจากขาดแคลนหน่วย GPS ทางทหาร ทำให้ทหารสหรัฐฯ จำนวนมากใช้หน่วย GPS พลเรือนที่ส่งมาจากบ้าน ในช่วงทศวรรษ 1990 ระบบ GPS แบบดิฟเฟ อเรนเชียล จากหน่วยยามฝั่งสหรัฐฯสำนักงานบริหารการบินแห่งสหรัฐฯและหน่วยงานที่คล้ายคลึงกันในประเทศอื่นๆ เริ่มออกอากาศการแก้ไข GPS ในพื้นที่ ซึ่งช่วยลดผลกระทบของการเสื่อมสภาพของ SA และผลกระทบจากบรรยากาศ (ซึ่งเครื่องรับสัญญาณทางทหารก็แก้ไขเช่นกัน) กองทัพสหรัฐฯ ยังได้พัฒนาวิธีการรบกวนสัญญาณ GPS ในพื้นที่ ซึ่งหมายความว่าความสามารถในการลดประสิทธิภาพของระบบทั่วโลกนั้นไม่จำเป็นอีกต่อไป ด้วยเหตุนี้ ประธานาธิบดีบิล คลินตัน แห่งสหรัฐอเมริกา จึงลงนามในร่างกฎหมายสั่งให้ปิดใช้งาน Selective Availability ในวันที่ 1 พฤษภาคม 2000 [ 9 ]และในปี 2007 รัฐบาลสหรัฐฯ ประกาศว่าดาวเทียม GPS รุ่นต่อไปจะไม่รวมคุณสมบัตินี้[ 10 ]
ความก้าวหน้าทางเทคโนโลยีและความต้องการใหม่ๆ ของระบบที่มีอยู่ได้นำไปสู่ความพยายามในการปรับปรุง GPS ให้ทันสมัยและนำ ดาวเทียม GPS Block III รุ่นต่อไป และระบบควบคุมการปฏิบัติงานรุ่นต่อไป (OCX) [ 11 ]ซึ่งได้รับการอนุมัติจากรัฐสภาสหรัฐฯในปี 2543 เมื่อ Selective Availability ถูกยกเลิก GPS มีความแม่นยำประมาณ 5 เมตร (16 ฟุต) เครื่องรับ GPS ที่ใช้ย่านความถี่ L5 มีความแม่นยำสูงกว่ามากถึง 30 เซนติเมตร (12 นิ้ว) ในขณะที่เครื่องรับสำหรับแอปพลิเคชันระดับสูง เช่น วิศวกรรมและการสำรวจที่ดิน มีความแม่นยำภายใน2เซนติเมตร ( 3/4นิ้ว ) และสามารถให้ความแม่นยำต่ำกว่ามิลลิเมตรได้ด้วยการวัดระยะยาว[ 9 ] [ 12 ] [ 13 ]อุปกรณ์สำหรับผู้บริโภค เช่น สมาร์ทโฟน สามารถมีความแม่นยำถึง 4.9 เมตร (16 ฟุต) หรือดีกว่านั้นเมื่อใช้ร่วมกับบริการช่วยเหลือ เช่น การระบุตำแหน่ง ด้วยWi-Fi [ 14 ]
ณ เดือนมีนาคม พ.ศ. 2569 ดาวเทียม GPS จำนวน 21 ดวงได้ออกอากาศสัญญาณ L5 ซึ่งถือว่าเป็นสัญญาณก่อนการใช้งานจริง ก่อนที่จะมีการออกอากาศโดยดาวเทียมครบ 24 ดวงในปี พ.ศ. 2560 [ 15 ]
ประวัติศาสตร์
โครงการ GPS เปิดตัวในสหรัฐอเมริกาในปี 1973 เพื่อเอาชนะข้อจำกัดของระบบนำทางก่อนหน้านี้[ 16 ]โดยผสมผสานแนวคิดจากระบบก่อนหน้าหลายระบบ รวมถึงการศึกษาการออกแบบทางวิศวกรรมที่เป็นความลับจากช่วงทศวรรษ 1960 กระทรวงกลาโหมสหรัฐฯ พัฒนาระบบนี้ ซึ่งเดิมใช้ดาวเทียม 24 ดวง สำหรับใช้โดยกองทัพสหรัฐฯ และเริ่มใช้งานได้อย่างเต็มรูปแบบในปี 1993 การใช้งานโดยพลเรือนได้รับอนุญาตตั้งแต่ทศวรรษ 1980 Roger L. Eastonจากห้องปฏิบัติการวิจัยกองทัพเรือ , Ivan A. GettingจากThe Aerospace CorporationและBradford Parkinsonจากห้องปฏิบัติการฟิสิกส์ประยุกต์ได้รับเครดิตว่าเป็นผู้คิดค้น[ 17 ]งานของGladys Westจากสาขาวิทยาศาสตร์ขีปนาวุธที่ Dahlgren Naval Proving Groundในการสร้างแบบจำลองทางธรณีวิทยาทางคณิตศาสตร์ของโลก ได้รับการยกย่องว่ามีส่วนสำคัญในการพัฒนาเทคนิคการคำนวณสำหรับการตรวจจับตำแหน่งดาวเทียมด้วยความแม่นยำที่จำเป็นสำหรับ GPS [ 18 ] [ 19 ]
การออกแบบ GPS มีพื้นฐานบางส่วนมาจากระบบ นำทางด้วยคลื่นวิทยุภาคพื้นดินที่คล้ายคลึงกันเช่นLORANและระบบนำทาง Deccaซึ่งพัฒนาขึ้นในช่วงต้นทศวรรษ 1940 ในปี 1955 Friedwardt Winterbergได้เสนอการทดสอบทฤษฎีสัมพัทธภาพทั่วไป — การตรวจจับการชะลอตัวของเวลาในสนามแรงโน้มถ่วงที่รุนแรงโดยใช้นาฬิกาอะตอมที่แม่นยำซึ่งวางอยู่ในวงโคจรภายในดาวเทียมเทียม ทฤษฎีสัมพัทธภาพพิเศษและทั่วไปทำนายว่านาฬิกาบนดาวเทียม GPS เมื่อสังเกตจากนาฬิกาบนโลก จะเดินเร็วกว่านาฬิกาบนโลก 38 ไมโครวินาทีต่อวัน[ 20 ]การออกแบบ GPS แก้ไขความแตกต่างนี้[ 21 ] [ 22 ]
บรรพบุรุษ
เมื่อสหภาพโซเวียตปล่อยดาวเทียมเทียมดวงแรก ( สปุตนิก 1 ) ในปี พ.ศ. 2490 นักฟิสิกส์ชาวอเมริกันสองคนคือ วิลเลียม กุยเออร์ และ จอร์จ ไวเฟนบัค ที่ห้องปฏิบัติการฟิสิกส์ประยุกต์ (APL) ของมหาวิทยาลัยจอห์นส์ ฮอปกินส์ ได้เฝ้าติดตามการส่งสัญญาณวิทยุ [ 23 ]ภายในไม่กี่ชั่วโมง พวกเขาก็ตระหนักว่าเนื่องจากปรากฏการณ์ดอปเปลอร์พวกเขาสามารถระบุตำแหน่งของดาวเทียมตามวงโคจรได้ ผู้อำนวยการของ APL อนุญาตให้พวกเขาเข้าถึง คอมพิวเตอร์ UNIVAC Iเพื่อทำการคำนวณที่ซับซ้อนที่จำเป็น

ต้นปีถัดมา แฟรงค์ แมคคลัวร์ รองผู้อำนวยการของ APL ได้ขอให้กุยเออร์และไวเฟนบัคตรวจสอบปัญหาย้อนกลับ: การระบุตำแหน่งของผู้ใช้โดยพิจารณาจากตำแหน่งของดาวเทียม (ในขณะนั้น กองทัพเรือกำลังพัฒนา ขีปนาวุธ โพลาริส ที่ยิงจากเรือดำน้ำ ซึ่งจำเป็นต้องทราบตำแหน่งของเรือดำน้ำ) สิ่งนี้ทำให้พวกเขาและ APL พัฒนาระบบTRANSIT ขึ้นมา [ 24 ]ในปี พ.ศ. 2492 ARPA (เปลี่ยนชื่อเป็นDARPAในปี พ.ศ. 2515) ก็มีบทบาทใน TRANSIT เช่นกัน[ 25 ] [ 26 ] [ 27 ]
TRANSIT ได้รับการทดสอบสำเร็จครั้งแรกในปี พ.ศ. 2503 [ 28 ]โดยใช้กลุ่มดาวเทียม 5 ดวง และสามารถระบุตำแหน่งการนำทางได้ประมาณชั่วโมงละครั้ง ในปี พ.ศ. 2510 กองทัพเรือสหรัฐฯ ได้พัฒนา ดาวเทียม Timationซึ่งพิสูจน์ให้เห็นถึงความเป็นไปได้ในการติดตั้งนาฬิกาที่แม่นยำในอวกาศ ซึ่งเป็นเทคโนโลยีที่จำเป็นสำหรับ GPS [ 29 ]
ในช่วงทศวรรษ 1970 ระบบนำทาง OMEGAบนพื้นดินซึ่งใช้การเปรียบเทียบเฟสของการส่งสัญญาณจากสถานีคู่[ 30 ]กลายเป็นระบบนำทางวิทยุทั่วโลกระบบแรก ข้อจำกัดของระบบเหล่านี้ทำให้เกิดความต้องการโซลูชันการนำทางที่เป็นสากลมากขึ้นซึ่งมีความแม่นยำยิ่งขึ้น
แม้ว่าจะมีความต้องการการนำทางที่แม่นยำอย่างกว้างขวางในภาคทหารและพลเรือน แต่แทบไม่มีความต้องการใดที่ถูกมองว่าเป็นเหตุผลที่เพียงพอสำหรับเงินหลายพันล้านดอลลาร์ที่จะต้องใช้ในการวิจัย พัฒนา ติดตั้ง และใช้งานกลุ่มดาวเทียมนำทาง ในช่วงสงครามเย็นการแข่งขันด้านอาวุธ ภัยคุกคามทางนิวเคลียร์ต่อการดำรงอยู่ของสหรัฐอเมริกาเป็นความต้องการเดียวที่รัฐสภาสหรัฐอเมริกาเห็นว่าเป็นเหตุผลที่เพียงพอสำหรับค่าใช้จ่ายนี้ ผลกระทบในการป้องปรามนี้เป็นเหตุผลที่ทำให้ GPS ได้รับเงินทุน[ 31 ] [ 32 ] [ 33 ]และนี่ก็เป็นเหตุผลที่ทำให้ต้องเก็บเป็นความลับอย่างยิ่งในเวลานั้นอาวุธนิวเคลียร์สามส่วน ประกอบด้วย ขีปนาวุธนำวิถีจากเรือดำน้ำ (SLBM) ของกองทัพเรือสหรัฐพร้อมด้วยเครื่องบินทิ้งระเบิดเชิงกลยุทธ์และขีปนาวุธข้ามทวีป (ICBM) ของ กองทัพอากาศสหรัฐ (USAF) การกำหนดตำแหน่งการยิง SLBM ที่แม่นยำถือเป็นสิ่งสำคัญยิ่งต่อท่าทีการป้องปรามทางนิวเคลียร์ และเป็นตัว คูณ กำลัง
การนำทางที่แม่นยำจะช่วยให้ เรือดำน้ำขีปนาวุธของสหรัฐฯสามารถกำหนดตำแหน่งได้อย่างแม่นยำก่อนที่จะปล่อยขีปนาวุธ SLBM [ 34 ]กองทัพอากาศสหรัฐฯ ซึ่งมีอาวุธนิวเคลียร์ 2 ใน 3 ของกลุ่มอาวุธนิวเคลียร์สามส่วน ก็มีความต้องการระบบนำทางที่แม่นยำและเชื่อถือได้มากขึ้นเช่นกัน กองทัพเรือและกองทัพอากาศสหรัฐฯ กำลังพัฒนาเทคโนโลยีของตนเองไปพร้อมๆ กันเพื่อแก้ปัญหาที่โดยพื้นฐานแล้วเป็นปัญหาเดียวกัน เพื่อเพิ่มความอยู่รอดของขีปนาวุธ ICBM มีข้อเสนอให้ใช้แท่นยิงเคลื่อนที่ (เทียบได้กับSS-24และSS-25 ของโซเวียต ) ดังนั้นความจำเป็นในการกำหนดตำแหน่งการยิงจึงมีความคล้ายคลึงกับสถานการณ์ของขีปนาวุธ SLBM
ในปี พ.ศ. 2503 กองทัพอากาศได้เสนอระบบนำทางด้วยคลื่นวิทยุที่เรียกว่า MOSAIC (Mobile System for Accurate ICBM Control) ซึ่งโดยพื้นฐานแล้วเป็นระบบ LORAN แบบ 3 มิติ มีการศึกษาต่อยอดในโครงการ 57 ในปี พ.ศ. 2506 และ "แนวคิด GPS ถือกำเนิดขึ้นจากการศึกษานี้" ในปีเดียวกันนั้น แนวคิดดังกล่าวได้รับการพัฒนาต่อในโครงการ 621B ซึ่งมี "คุณลักษณะหลายอย่างที่คุณเห็นใน GPS ในปัจจุบัน" [ 35 ]และสัญญาว่าจะเพิ่มความแม่นยำให้กับเครื่องบินทิ้งระเบิดของกองทัพอากาศสหรัฐฯ รวมถึงขีปนาวุธข้ามทวีปด้วย

การอัปเดตจากระบบ TRANSIT ของกองทัพเรือนั้นช้าเกินไปสำหรับความเร็วสูงของการปฏิบัติงานของกองทัพอากาศห้องปฏิบัติการวิจัยกองทัพเรือ (NRL) ยังคงพัฒนา ดาวเทียม Timation (การนำทางตามเวลา) ต่อไป โดยดาวเทียมดวงแรกถูกปล่อยขึ้นสู่อวกาศในปี 1967 ดวงที่สองในปี 1969 ดวงที่สามในปี 1974 ซึ่งบรรทุกนาฬิกาอะตอมเรือน แรก ขึ้นสู่วงโคจร และดวงที่สี่ในปี 1977 [ 36 ]
ระบบ นำทางที่สำคัญอีกระบบหนึ่งที่มาก่อน GPS มาจากหน่วยงานอื่นของกองทัพสหรัฐฯ ในปี พ.ศ. 2507 กองทัพบกสหรัฐฯ ได้ส่ง ดาวเทียม Sequential Collation of Range ( SECOR ) ดวงแรกขึ้นสู่วง โคจร ซึ่งใช้สำหรับการสำรวจทางธรณีวิทยา [ 37 ]ระบบ SECOR ประกอบด้วยเครื่องส่งสัญญาณภาคพื้นดิน 3 เครื่อง ณ ตำแหน่งที่ทราบ ซึ่งจะส่งสัญญาณไปยังทรานสปอนเดอร์ของดาวเทียมในวงโคจร สถานีภาคพื้นดินที่สี่ ณ ตำแหน่งที่ไม่แน่นอน สามารถใช้สัญญาณเหล่านั้นเพื่อกำหนดตำแหน่งของตนได้อย่างแม่นยำ ดาวเทียม SECOR ดวงสุดท้ายถูกปล่อยขึ้นสู่อวกาศในปี พ.ศ. 2512 [ 38 ]
การพัฒนา
ด้วยการพัฒนาควบคู่กันไปในช่วงทศวรรษ 1960 ระบบที่เหนือกว่าสามารถพัฒนาได้โดยการสังเคราะห์เทคโนโลยีที่ดีที่สุดจาก 621B, Transit, Timation และ SECOR ในโปรแกรมบริการหลายประเภท ข้อผิดพลาดของตำแหน่งวงโคจรของดาวเทียมที่เกิดจากการเปลี่ยนแปลงในสนามแรงโน้มถ่วงและการหักเหของเรดาร์เป็นต้น จำเป็นต้องได้รับการแก้ไข ทีมที่นำโดย Harold L. Jury จาก Pan Am Aerospace Division ในฟลอริดา ตั้งแต่ปี 1970 ถึง 1973 ได้ใช้การดูดซับข้อมูลแบบเรียลไทม์และการประมาณค่าแบบวนซ้ำเพื่อดำเนินการดังกล่าว ลดข้อผิดพลาดที่เป็นระบบและข้อผิดพลาดที่เหลืออยู่ให้อยู่ในระดับที่จัดการได้ เพื่อให้สามารถนำทางได้อย่างแม่นยำ[ 39 ]
ในช่วงสุดสัปดาห์วันแรงงานปี 1973 การประชุมของเจ้าหน้าที่ทหารประมาณสิบสองนายที่เพนตากอนได้หารือเกี่ยวกับการสร้างระบบดาวเทียมนำทางเพื่อการป้องกันประเทศ (DNSS)การประชุมครั้งนี้เป็นการสังเคราะห์ที่แท้จริงซึ่งต่อมากลายเป็น GPS ต่อมาในปีนั้น โครงการ DNSS ได้รับการตั้งชื่อว่าNavstar [ 40 ]ชื่อNavstarไม่ใช่คำย่อ แต่ถูกเลือกเพียงเพราะเป็นคำที่ฟังดูดี[ 41 ]เนื่องจากดาวเทียมแต่ละดวงมีความเกี่ยวข้องกับชื่อ Navstar (เช่นเดียวกับรุ่นก่อนหน้าอย่าง Transit และ Timation) จึงมีการใช้ชื่อที่ครอบคลุมมากขึ้นเพื่อระบุกลุ่มดาวเทียม Navstar คือNavstar-GPS [ 42 ] ดาวเทียม ต้นแบบ " Block I " จำนวนสิบดวงถูกปล่อยขึ้นสู่อวกาศระหว่างปี 1978 ถึง 1985 (อีกหนึ่งดวงถูกทำลายในการปล่อยที่ไม่สำเร็จ) [ 43 ]
ผลกระทบของชั้นบรรยากาศไอโอโนสเฟียร์ต่อการส่งสัญญาณวิทยุได้รับการตรวจสอบในห้องปฏิบัติการธรณีฟิสิกส์ของห้องปฏิบัติการวิจัยกองทัพอากาศเคมบริดจ์ซึ่งเปลี่ยนชื่อเป็นห้องปฏิบัติการวิจัยธรณีฟิสิกส์กองทัพอากาศ (AFGRL) ในปี 1974 AFGRL ได้พัฒนาแบบจำลอง Klobuchar สำหรับการคำนวณ การแก้ไข ชั้นบรรยากาศ ไอโอ โนสเฟียร์สำหรับตำแหน่ง GPS [ 44 ]ที่น่าสนใจคืองานที่ทำโดยนักวิทยาศาสตร์อวกาศชาวออสเตรเลียElizabeth Essex-Cohenที่ AFGRL ในปี 1974 เธอมีความกังวลเกี่ยวกับการโค้งงอของเส้นทางของคลื่นวิทยุ ( การหักเหของบรรยากาศ ) ที่ผ่านชั้นบรรยากาศไอโอโนสเฟียร์จากดาวเทียม Navstar [ 45 ]
หลังจากเหตุการณ์โศกนาฏกรรมในปี 1983 ที่ เครื่องบิน โบอิ้ง 747 ของ สายการบินโคเรียนแอร์ไลน์ เที่ยวบิน 007 ซึ่งบรรทุกผู้โดยสาร 269 คน ถูก เครื่องบินสกัดกั้นของโซเวียตยิงตกหลังจากบินเข้าไปในน่านฟ้าต้องห้ามเนื่องจากข้อผิดพลาดในการนำทาง[ 46 ]ในบริเวณใกล้เคียงกับ เกาะ ซาคาลินและเกาะโมเนรอนประธานาธิบดีโรนัลด์ เรแกน ได้ออกคำสั่งให้ GPS สามารถใช้งานได้ฟรีสำหรับพลเรือน เมื่อได้รับการพัฒนาอย่างเพียงพอแล้ว เพื่อเป็นสาธารณประโยชน์[ 47 ]ดาวเทียม Block II ดวงแรกถูกปล่อยขึ้นสู่อวกาศเมื่อวันที่ 14 กุมภาพันธ์ 1989 [ 48 ]และดาวเทียมดวงที่ 24 ถูกปล่อยขึ้นสู่อวกาศในปี 1994 ค่าใช้จ่ายของโครงการ GPS ในขณะนั้น ไม่รวมค่าใช้จ่ายของอุปกรณ์ผู้ใช้ แต่รวมค่าใช้จ่ายในการปล่อยดาวเทียมแล้ว มีการประมาณการไว้ที่ 5 พันล้านดอลลาร์สหรัฐ (เทียบเท่ากับ 11 พันล้านดอลลาร์สหรัฐในปี 2025) [ 49 ]
ในขั้นต้น สัญญาณคุณภาพสูงสุดถูกสงวนไว้สำหรับการใช้งานทางทหาร และสัญญาณที่ใช้ได้สำหรับพลเรือนถูกลดคุณภาพลงโดยเจตนา ซึ่งเป็นนโยบายที่เรียกว่าSelective Availabilityสิ่งนี้เปลี่ยนแปลงไปเมื่อวันที่ 1 พฤษภาคม พ.ศ. 2543 เมื่อประธานาธิบดีบิล คลินตันของสหรัฐฯ ลงนามในคำสั่งนโยบายเพื่อปิด Selective Availability เพื่อให้พลเรือนได้รับความแม่นยำในระดับเดียวกับที่กองทัพได้รับ คำสั่งนี้เสนอโดยรัฐมนตรีว่าการกระทรวงกลาโหมสหรัฐฯวิลเลียม เพอร์รีเนื่องจากมีการเติบโตอย่างแพร่หลายของ บริการ GPS แบบดิฟเฟอเรนเชียลโดยภาคเอกชนเพื่อปรับปรุงความแม่นยำสำหรับพลเรือน นอกจากนี้ กองทัพสหรัฐฯ กำลังพัฒนาเทคโนโลยีเพื่อขัดขวางการให้บริการ GPS แก่ศัตรูที่มีศักยภาพในระดับภูมิภาค[ 50 ] Selective Availability ถูกลบออกจากสถาปัตยกรรม GPS ตั้งแต่ GPS-III เป็นต้นไป
นับตั้งแต่เริ่มใช้งาน สหรัฐอเมริกาได้ดำเนินการปรับปรุงบริการ GPS หลายประการ รวมถึงสัญญาณใหม่สำหรับการใช้งานพลเรือน และความแม่นยำและความสมบูรณ์ที่เพิ่มขึ้นสำหรับผู้ใช้ทุกคน ในขณะเดียวกันก็ยังคงรักษาความเข้ากันได้กับอุปกรณ์ GPS ที่มีอยู่ การปรับปรุงระบบดาวเทียมให้ทันสมัยเป็นโครงการริเริ่มอย่างต่อเนื่องของกระทรวงกลาโหมสหรัฐฯ ผ่านการจัดซื้อดาวเทียม หลายชุด เพื่อตอบสนองความต้องการที่เพิ่มขึ้นของกองทัพ พลเรือน และตลาดเชิงพาณิชย์ ณ ต้นปี 2558 เครื่องรับ GPS บริการกำหนดตำแหน่งมาตรฐาน (SPS) คุณภาพสูงให้ความแม่นยำในแนวนอนดีกว่า 3.5 เมตร (11 ฟุต) [ 9 ]แม้ว่าหลายปัจจัย เช่น คุณภาพของเครื่องรับและเสาอากาศ และปัญหาบรรยากาศอาจส่งผลต่อความแม่นยำนี้
ระบบ GPS เป็นของรัฐบาลสหรัฐอเมริกาและดำเนินการโดยรัฐบาลสหรัฐอเมริกาในฐานะทรัพยากรแห่งชาติ กระทรวงกลาโหมเป็นผู้ดูแลระบบ GPS คณะกรรมการบริหาร GPS ระหว่างหน่วยงาน (IGEB)ดูแลเรื่องนโยบาย GPS ตั้งแต่ปี 1996 ถึง 2004 หลังจากนั้น คณะกรรมการบริหารการกำหนดตำแหน่ง การนำทาง และการกำหนดเวลาจากอวกาศแห่งชาติ (National Space-Based Positioning, Navigation and Timing Executive Committee) ได้รับการจัดตั้งขึ้นตามคำสั่งของประธานาธิบดีในปี 2004 เพื่อให้คำแนะนำและประสานงานหน่วยงานและกระทรวงของรัฐบาลกลางในเรื่องที่เกี่ยวข้องกับ GPS และระบบที่เกี่ยวข้อง[ 51 ]คณะกรรมการบริหารนี้มีรองปลัดกระทรวงกลาโหมและกระทรวงคมนาคมเป็นประธานร่วมกัน สมาชิกประกอบด้วยเจ้าหน้าที่ระดับเดียวกันจากกระทรวงการต่างประเทศ กระทรวงพาณิชย์ และกระทรวงความมั่นคงแห่งชาติ คณะเสนาธิการร่วม และ NASAส่วนประกอบของสำนักงานบริหารของประธานาธิบดีเข้าร่วมในฐานะผู้สังเกตการณ์ในคณะกรรมการบริหาร และประธาน FCC เข้าร่วมในฐานะผู้ประสานงาน
กระทรวงกลาโหมสหรัฐฯ มีหน้าที่ตามกฎหมายที่จะต้อง "รักษาระบบบริการระบุตำแหน่งมาตรฐาน (ตามที่กำหนดไว้ในแผนการนำทางด้วยคลื่นวิทยุของรัฐบาลกลางและข้อกำหนดสัญญาณบริการระบุตำแหน่งมาตรฐาน) ที่จะสามารถใช้งานได้อย่างต่อเนื่องทั่วโลก" และ "พัฒนามาตรการเพื่อป้องกันการใช้ GPS และส่วนเสริมของ GPS ในทางที่เป็นศัตรู โดยไม่รบกวนหรือลดทอนการใช้งานของพลเรือนมากเกินไป"
ลำดับเวลาและการปรับปรุงให้ทันสมัย

| ปิดกั้น | ช่วงเวลาเปิดตัว | การปล่อยดาวเทียม | กำลังดำเนินการ และมีสุขภาพดี | |||
|---|---|---|---|---|---|---|
| ความสำเร็จ | ความล้มเหลว | เปิดตัว | วางแผนไว้ | |||
| ฉัน | พ.ศ. 2521–2528 | 10 | 1 | 0 | 0 | 0 |
| 2. | พ.ศ. 2532–2533 | 9 | 0 | 0 | 0 | 0 |
| ไอไอเอ | พ.ศ. 2533–2540 | 19 | 0 | 0 | 0 | 0 |
| ไออาร์ไอ | พ.ศ. 2540–2547 | 12 | 1 | 0 | 0 | 4 |
| ไออาร์-เอ็ม | พ.ศ. 2548–2552 | 8 | 0 | 0 | 0 | 7 |
| ไอเอฟ | 2010–2016 | 12 | 0 | 0 | 0 | 11 |
| 3. | 2018–2026 | 9 | 0 | 1 | 0 | 9 |
| IIIF | 2027– | 0 | 0 | 0 | 22 | 0 |
| ทั้งหมด | 79 | 2 | 1 | 22 | 31 | |
| (อัปเดตล่าสุด: 25 เมษายน 2569) สำหรับรายชื่อที่ครบถ้วนยิ่งขึ้น โปรดดูที่ รายชื่อดาวเทียม GPS | ||||||
- ในปี พ.ศ. 2515 ศูนย์ทดสอบการนำทางเฉื่อยกลางของกองทัพอากาศสหรัฐฯ (ฐานทัพอากาศฮอลโลแมน) ได้ทำการทดสอบการบินเพื่อพัฒนาเครื่องรับ GPS ต้นแบบ 4 เครื่องในรูปแบบ Y เหนือพื้นที่ทดสอบขีปนาวุธไวท์แซนด์สโดยใช้ดาวเทียมจำลองภาคพื้นดิน[ 56 ]
- ในปี พ.ศ. 2521 ดาวเทียม GPS รุ่นทดลอง Block-I ดวงแรกถูกปล่อยขึ้นสู่อวกาศ[ 43 ]
- ในปี พ.ศ. 2526 หลังจากเครื่องบินสกัดกั้นของสหภาพโซเวียตยิงเครื่องบินโดยสารพลเรือนKAL 007ที่บินเข้าไปในน่านฟ้าต้องห้ามเนื่องจากข้อผิดพลาดในการนำทาง ทำให้ผู้โดยสารและลูกเรือเสียชีวิตทั้งหมด 269 คน ประธานาธิบดีโรนัลด์ เรแกนของสหรัฐฯ ประกาศว่า GPS จะเปิดให้ใช้งานสำหรับพลเรือนเมื่อการพัฒนาเสร็จสมบูรณ์[ 8 ] [ 57 ] [ 58 ]แม้ว่าจะทราบกันดีอยู่แล้วตั้งแต่ปี พ.ศ. 2522 ว่ารหัส CA (รหัส Coarse/Acquisition) จะพร้อมใช้งานสำหรับผู้ใช้พลเรือน[ 59 ] [ 60 ]
- ภายในปี 1985 ดาวเทียมทดลอง Block-I อีกสิบดวงได้ถูกปล่อยขึ้นสู่อวกาศเพื่อตรวจสอบแนวคิดดังกล่าว
- ตั้งแต่ปี 1988 เป็นต้นไป การควบคุมและสั่งการดาวเทียมเหล่านี้ได้ถูกย้ายจาก ฐานทัพ อากาศโอนิซูกะ รัฐแคลิฟอร์เนีย ไปยังกองบินควบคุมดาวเทียมที่ 2 (2SCS) ซึ่งตั้งอยู่ที่ฐานทัพอวกาศชรีเวอร์ในโคโลราโดสปริงส์ รัฐโคโลราโด[ 61 ] [ 62 ]
- เมื่อวันที่ 14 กุมภาพันธ์ พ.ศ. 2532 ดาวเทียม Block-II รุ่นใหม่ดวงแรกได้ถูกปล่อยขึ้นสู่อวกาศ
- สงครามอ่าวเปอร์เซียระหว่างปี 1990 ถึง 1991 เป็นความขัดแย้งครั้งแรกที่กองทัพใช้ GPS อย่างแพร่หลาย[ 63 ]
- ในปี พ.ศ. 2534 โครงการของ DARPA ในการสร้างเครื่องรับ GPS ขนาดเล็กประสบความสำเร็จ โดยแทนที่เครื่องรับ GPS สำหรับใช้ในกองทัพที่มีน้ำหนัก 16 กก. (35 ปอนด์) ด้วยเครื่องรับ GPS แบบพกพาดิจิทัลที่มีน้ำหนักเพียง 1.25 กก. (2.8 ปอนด์) [ 26 ]
- ในปี 1991 บริษัท TomTomผู้ผลิตระบบนำทางด้วยดาวเทียมจากประเทศเนเธอร์แลนด์ ได้ก่อตั้งขึ้น
- ในปี 1992 กองบินอวกาศที่ 2ซึ่งเดิมทีเป็นผู้ดูแลระบบนี้ ได้ถูกยุบเลิกและแทนที่ด้วยกองบินอวกาศที่ 50
- ภายในเดือนธันวาคม พ.ศ. 2536 GPS บรรลุความสามารถในการใช้งานขั้นต้น (IOC) โดยมีกลุ่มดาวเทียมครบ (24 ดวง) และให้บริการระบุตำแหน่งมาตรฐาน (SPS) [ 64 ]
- กองทัพอากาศประกาศความสามารถในการปฏิบัติการเต็มรูปแบบ (FOC) ในเดือนเมษายน พ.ศ. 2538 ซึ่งหมายถึงความพร้อมใช้งานเต็มรูปแบบของบริการกำหนดตำแหน่งที่แม่นยำและปลอดภัยของกองทัพ (PPS) [ 64 ]
- ในปี พ.ศ. 2539 ประธานาธิบดีบิล คลินตัน แห่งสหรัฐอเมริกา ได้ออกคำสั่งนโยบาย [ 65 ]โดยตระหนักถึงความสำคัญของ GPS ต่อผู้ใช้พลเรือนและผู้ใช้ทางทหาร และ ประกาศให้ GPS เป็น ระบบ ใช้งานแบบคู่ ขนาน พร้อมทั้งจัดตั้งคณะกรรมการบริหาร GPS ระหว่างหน่วยงานเพื่อบริหารจัดการให้เป็นทรัพย์สินของชาติ
- ในปี 1998 อัล กอร์รองประธานาธิบดีสหรัฐฯประกาศแผนการอัปเกรด GPS ด้วยสัญญาณพลเรือนใหม่สองสัญญาณ เพื่อเพิ่มความแม่นยำและความน่าเชื่อถือในการใช้งาน โดยเฉพาะอย่างยิ่งในด้านความปลอดภัยทางการบิน และในปี 2000 รัฐสภาสหรัฐฯได้อนุมัติโครงการนี้ โดยเรียกชื่อว่าGPS III
- เมื่อวันที่ 2 พฤษภาคม 2000 ระบบ "การรับสัญญาณแบบเลือกเฉพาะพื้นที่" (Selective Availability) ถูกยกเลิกตามคำสั่งบริหารปี 1996 ทำให้ผู้ใช้งานพลเรือนสามารถรับสัญญาณที่ไม่ลดทอนคุณภาพได้ทั่วโลก
- ในปี 2004 รัฐบาลสหรัฐอเมริกาได้ลงนามในข้อตกลงกับประชาคมยุโรปเพื่อจัดตั้งความร่วมมือที่เกี่ยวข้องกับระบบ GPS และระบบกาลิเลโอ ของ ยุโรป
- ในปี พ.ศ. 2547 ประธานาธิบดี จอร์จ ดับเบิลยู. บุชแห่งสหรัฐอเมริกาได้ปรับปรุงนโยบายระดับชาติและแทนที่คณะกรรมการบริหารด้วยคณะกรรมการบริหารระดับชาติสำหรับการกำหนดตำแหน่ง การนำทาง และการกำหนดเวลาจากอวกาศ[ 66 ]
- ในเดือนพฤศจิกายน พ.ศ. 2547 QualcommประกาศผลการทดสอบGPS ช่วยเหลือสำหรับโทรศัพท์มือถือที่ ประสบความสำเร็จ [ 67 ]
- ในปี พ.ศ. 2548 ดาวเทียม GPS รุ่นใหม่ดวงแรกถูกปล่อยขึ้นสู่อวกาศและเริ่มส่งสัญญาณพลเรือนที่สอง (L2C) เพื่อเพิ่มประสิทธิภาพการใช้งานของผู้ใช้[ 68 ]
- เมื่อวันที่ 14 กันยายน พ.ศ. 2550 ระบบควบคุม ภาคพื้นดิน ที่ใช้เมนเฟรมซึ่งล้าสมัยได้ ถูกโอนไปยังแผนวิวัฒนาการสถาปัตยกรรมใหม่[ 69 ]
- เมื่อวันที่ 19 พฤษภาคม พ.ศ. 2552 สำนักงานตรวจสอบบัญชีของรัฐบาลสหรัฐอเมริกาได้ออกรายงานเตือนว่าดาวเทียม GPS บางดวงอาจใช้งานไม่ได้ภายในปี พ.ศ. 2553 [ 70 ]
- เมื่อวันที่ 21 พฤษภาคม พ.ศ. 2552 กองบัญชาการอวกาศกองทัพอากาศได้คลายความกังวลเรื่องความล้มเหลวของ GPS โดยกล่าวว่า "มีความเสี่ยงเพียงเล็กน้อยที่เราจะไม่สามารถรักษามาตรฐานประสิทธิภาพของเราต่อไปได้" [ 71 ]
- เมื่อวันที่ 11 มกราคม พ.ศ. 2553 การอัปเดตระบบควบคุมภาคพื้นดินทำให้เกิดความไม่เข้ากันของซอฟต์แวร์กับเครื่องรับสัญญาณทางทหารจำนวน 8,000 ถึง 10,000 เครื่องที่ผลิตโดยแผนกหนึ่งของ Trimble Navigation Limited แห่ง Sunnyvale รัฐแคลิฟอร์เนีย[ 72 ]
- เมื่อวันที่ 25 กุมภาพันธ์ พ.ศ. 2553 [ 73 ]กองทัพอากาศสหรัฐฯ ได้มอบสัญญาให้กับบริษัท Raytheonเพื่อพัฒนาระบบควบคุมการปฏิบัติงาน GPS รุ่นต่อไป (OCX) เพื่อปรับปรุงความแม่นยำและความพร้อมใช้งานของสัญญาณนำทาง GPS และทำหน้าที่เป็นส่วนสำคัญของการปรับปรุง GPS ให้ทันสมัย
- วันที่ 24 กรกฎาคม พ.ศ. 2563 การดำเนินงานของกลุ่มดาวเทียม GPS ถูกโอนไปยังกองทัพอวกาศสหรัฐฯ ที่จัดตั้งขึ้นใหม่ ซึ่งเป็นส่วนหนึ่งของการจัดตั้ง[ 74 ]

ตราสัญลักษณ์ของกองบินปฏิบัติการอวกาศที่ 2 – หน่วยที่รับผิดชอบในการปฏิบัติงานของกลุ่มดาวเทียม - เมื่อวันที่ 13 ตุลาคม พ.ศ. 2566 กองทัพอวกาศได้เปิดใช้งานPNT Delta (ชั่วคราว)เพื่อจัดการสินทรัพย์สงครามการนำทาง ของสหรัฐฯ การดำเนินงาน 2SOPS และ GPS ได้รับการจัดเรียงใหม่ภายใต้ Deltaใหม่นี้[ 74 ]

รางวัล

เมื่อวันที่ 10 กุมภาพันธ์ 1993 สมาคมการบินแห่งชาติ (NAWA)ได้คัดเลือกทีม GPS ให้เป็นผู้ชนะรางวัลRobert J. Collier Trophy ประจำปี 1992 ซึ่งเป็นรางวัลด้านการบินที่ทรงเกียรติที่สุดของสหรัฐอเมริกา ทีมนี้ประกอบด้วยนักวิจัยจากห้องปฏิบัติการวิจัยกองทัพเรือ กองทัพอากาศสหรัฐฯ บริษัทAerospace Corporation บริษัท Rockwell International Corporation และ บริษัท IBM Federal Systems Company คำประกาศเกียรติคุณยกย่องพวกเขา "สำหรับการพัฒนาที่สำคัญที่สุดในการนำทางและการเฝ้าระวังอากาศยานและยานอวกาศอย่างปลอดภัยและมีประสิทธิภาพ นับตั้งแต่มีการนำระบบนำทางด้วยคลื่นวิทยุมาใช้เมื่อ 50 ปีที่แล้ว"
นักพัฒนา GPS สองคนได้รับรางวัล Charles Stark Draper จาก สถาบันวิศวกรรมแห่งชาติ ประจำปี 2003:
- อีวาน เกตติ้งอดีตประธานบริษัทThe Aerospace Corporationและวิศวกรจากสถาบันเทคโนโลยีแมสซาชูเซตส์ได้วางรากฐานของระบบ GPS โดยพัฒนาต่อยอดจาก ระบบวิทยุภาคพื้นดิน ในสมัยสงครามโลกครั้งที่สองที่เรียกว่า LORAN (Long-Range Radio Aid to Navigation)
- แบรดฟอร์ด พาร์กินสันศาสตราจารย์ด้านการบินและอวกาศแห่งมหาวิทยาลัยสแตนฟอร์ดเป็นผู้คิดค้นระบบดาวเทียมในปัจจุบันในช่วงต้นทศวรรษ 1960 และพัฒนาระบบนี้ร่วมกับกองทัพอากาศสหรัฐฯ พาร์กินสันรับราชการในกองทัพอากาศเป็นเวลา 21 ปี ตั้งแต่ปี 1957 ถึง 1978 และเกษียณอายุราชการด้วยยศพันเอก
Roger L. Eastonผู้พัฒนา GPS ได้รับเหรียญรางวัลเทคโนโลยีแห่งชาติเมื่อวันที่ 13 กุมภาพันธ์ พ.ศ. 2549 [ 75 ] Francis X. Kane (พันเอกกองทัพอากาศสหรัฐฯ เกษียณแล้ว) ได้รับการแต่งตั้งเข้าสู่หอเกียรติยศผู้บุกเบิกด้านอวกาศและขีปนาวุธของกองทัพอากาศสหรัฐฯ ที่ฐานทัพอากาศ Lackland เมืองซานอันโตนิโอ รัฐเท็กซัส เมื่อวันที่ 2 มีนาคม พ.ศ. 2553 สำหรับบทบาทของเขาในการพัฒนาเทคโนโลยีอวกาศและแนวคิดการออกแบบทางวิศวกรรมของ GPS ซึ่งดำเนินการเป็นส่วนหนึ่งของโครงการ 621B ในปี พ.ศ. 2541 เทคโนโลยี GPS ได้รับการยกย่องให้เข้าสู่หอเกียรติยศเทคโนโลยีอวกาศของมูลนิธิอวกาศ[ 76 ]
เมื่อวันที่ 4 ตุลาคม พ.ศ. 2554 สหพันธ์การบินและอวกาศนานาชาติ (IAF) ได้มอบรางวัลครบรอบ 60 ปีให้กับระบบกำหนดตำแหน่งทั่วโลก (GPS) โดยได้รับการเสนอชื่อจากสถาบันการบินและอวกาศแห่งอเมริกา (AIAA) ซึ่งเป็นสมาชิกของ IAF คณะกรรมการเกียรติยศและรางวัลของ IAF ตระหนักถึงความเป็นเอกลักษณ์ของโครงการ GPS และบทบาทที่เป็นแบบอย่างในการสร้างความร่วมมือระหว่างประเทศเพื่อประโยชน์ของมนุษยชาติ[ 77 ]เมื่อวันที่ 6 ธันวาคม พ.ศ. 2561 Gladys West ได้รับการแต่งตั้งเข้าสู่หอเกียรติยศผู้บุกเบิกอวกาศและขีปนาวุธของกองทัพอากาศ เพื่อเป็นการยกย่องผลงานของเธอเกี่ยวกับแบบจำลองทางธรณีวิทยาของโลกที่มีความแม่นยำสูง ซึ่งในที่สุดก็ถูกนำมาใช้เพื่อกำหนดวงโคจรของกลุ่มดาวเทียม GPS [ 78 ] [ 79 ]เมื่อวันที่ 12 กุมภาพันธ์ พ.ศ. 2562 สมาชิกผู้ก่อตั้งโครงการ 4 คน ได้รับรางวัล Queen Elizabeth Prize for Engineering โดยประธานคณะกรรมการผู้มอบรางวัลกล่าวว่า "วิศวกรรมเป็นรากฐานของอารยธรรม ... พวกเขาได้เขียนโครงสร้างพื้นฐานของโลกเราขึ้นใหม่ในรูปแบบที่สำคัญ" [ 80 ]
หลักการ
ดาวเทียม GPS มีนาฬิกาอะตอม ที่มีความเสถียรสูงมาก ซึ่งซิงโครไนซ์กันเองและกับนาฬิกาอะตอมอ้างอิงที่สถานีควบคุมภาคพื้นดิน การเบี่ยงเบนใดๆ ของนาฬิกาบนดาวเทียมจากเวลาอ้างอิงที่สถานีภาคพื้นดินจะได้รับการแก้ไขอย่างสม่ำเสมอ[ 81 ]เนื่องจากความเร็วของคลื่นวิทยุ ( ความเร็วแสง ) [ 82 ]คงที่และไม่ขึ้นอยู่กับความเร็วของดาวเทียม ความล่าช้าของเวลาระหว่างที่ดาวเทียมส่งสัญญาณและสถานีภาคพื้นดินรับสัญญาณจึงเป็นสัดส่วนกับระยะทางจากดาวเทียมไปยังสถานีภาคพื้นดิน ด้วยข้อมูลระยะทางที่รวบรวมจากสถานีภาคพื้นดินหลายแห่ง พิกัดตำแหน่งของดาวเทียมใดๆ ในเวลาใดๆ ก็สามารถคำนวณได้อย่างแม่นยำมาก
ดาวเทียม GPS แต่ละดวงจะบันทึกตำแหน่งและเวลาของตัวเองอย่างแม่นยำ[ 83 ]และส่งข้อมูลนั้นอย่างต่อเนื่อง โดยอาศัยข้อมูลที่ได้รับจากดาวเทียม GPS หลายดวง เครื่องรับ GPS ของผู้ใช้ปลายทางสามารถคำนวณ ตำแหน่งสี่มิติของตัวเองในอวกาศและเวลาได้ อย่างไรก็ตาม อย่างน้อยที่สุด ต้องมีดาวเทียมอย่างน้อยสี่ดวงอยู่ในระยะการมองเห็นของเครื่องรับเพื่อให้สามารถคำนวณปริมาณที่ไม่ทราบค่าได้สี่ค่า (พิกัดตำแหน่งสามค่าและความคลาดเคลื่อนของนาฬิกาของตัวเองจากเวลาของดาวเทียม) [ 84 ]
คำอธิบายโดยละเอียดเพิ่มเติม
ดาวเทียม GPS แต่ละดวงจะส่งสัญญาณ ( คลื่นพาหะพร้อมการปรับคลื่น ) อย่างต่อเนื่อง ซึ่งประกอบด้วย:
- รหัสสุ่มเทียม (ลำดับของเลขหนึ่งและศูนย์) ที่ผู้รับทราบ โดยการปรับเวลาให้ตรงกันระหว่างรหัสที่ผู้รับสร้างขึ้นกับรหัสที่ผู้รับวัดได้ จะสามารถหาเวลาที่สัญญาณมาถึง (TOA) ของจุดที่กำหนดในลำดับรหัส ซึ่งเรียกว่ายุค (epoch) ได้ในมาตราเวลาของนาฬิกาผู้รับ
- ข้อความที่ประกอบด้วยเวลาส่ง (TOT) ของยุคโค้ด (ในมาตราเวลา GPS) และตำแหน่งของดาวเทียม ณ เวลานั้น
ตามหลักการแล้ว ตัวรับสัญญาณจะวัด TOA (ตามนาฬิกาของตัวเอง) ของสัญญาณดาวเทียมสี่ดวง จาก TOA และ TOT ตัวรับสัญญาณจะสร้าง ค่า เวลาบิน (TOF) สี่ค่า ซึ่ง (เมื่อพิจารณาความเร็วแสง) จะเทียบเท่าโดยประมาณกับระยะทางระหว่างตัวรับสัญญาณกับดาวเทียม บวกกับความแตกต่างของเวลาระหว่างตัวรับสัญญาณกับดาวเทียม GPS คูณด้วยความเร็วแสง ซึ่งเรียกว่าระยะทางเสมือน จากนั้นตัวรับสัญญาณจะคำนวณตำแหน่งสามมิติและการเบี่ยงเบนของนาฬิกาจากค่า TOF ทั้งสี่ค่า[ 85 ]
ในทางปฏิบัติ ตำแหน่งของเครื่องรับ (ในพิกัดคาร์ทีเซียน สามมิติ โดยมีจุดกำเนิดอยู่ที่ศูนย์กลางของโลก) และค่าชดเชยของนาฬิกาเครื่องรับเทียบกับเวลา GPS จะถูกคำนวณพร้อมกัน โดยใช้สมการการนำทางในการประมวลผล TOF (Time of Flight)
ตำแหน่งโซลูชันศูนย์กลางโลกของตัวรับมักจะถูกแปลงเป็นละติจูดลองจิจูดและความสูงโดยสัมพันธ์กับแบบจำลองโลกทรงรี จากนั้นความสูงอาจถูกแปลงเพิ่มเติมเป็นความสูงโดยสัมพันธ์กับจีออยด์ซึ่งโดยพื้นฐานแล้วคือระดับน้ำทะเลเฉลี่ย พิกัดเหล่านี้อาจแสดงผล เช่น บนหน้าจอแสดงแผนที่เคลื่อนที่หรือบันทึกหรือใช้โดยระบบอื่น เช่น ระบบนำทางยานพาหนะ[ 85 ]
ณ ปี 2025 หลักการพื้นฐานเหล่านี้ได้รับการปรับปรุงให้ดียิ่งขึ้นด้วยการปรับปรุงระบบดาวเทียม GPS อย่างต่อเนื่อง โดยมีการนำดาวเทียม GPS III และ GPS IIIF มาใช้ ดาวเทียมรุ่นใหม่เหล่านี้มีนาฬิกาอะตอมที่ทันสมัยยิ่งขึ้นเพื่อความแม่นยำในการบอกเวลาที่ดียิ่งขึ้น และส่งสัญญาณที่ทรงพลัง ปลอดภัย และใช้งานร่วมกันได้มากขึ้น (เช่น L1C, L2C และ L5) [ 86 ]ซึ่งช่วยปรับปรุงความแม่นยำของการวัดเวลาบิน (TOF) และต้านทานการรบกวนของสัญญาณได้ดีขึ้น ทำให้การคำนวณตำแหน่งมีความน่าเชื่อถือมากขึ้นสำหรับผู้ใช้ทุกคน[ 87 ]
เรขาคณิตดาวเทียมของผู้ใช้
แม้ว่าโดยปกติแล้วจะไม่ถูกสร้างขึ้นอย่างชัดเจนในการประมวลผลของตัวรับ แต่ความแตกต่างของเวลาในการมาถึงตามแนวคิด (TDOA) จะกำหนดเรขาคณิตของการวัด TDOA แต่ละรายการสอดคล้องกับไฮเปอร์โบโล อิด ของการหมุน (ดูMultilateration ) เส้นที่เชื่อมต่อดาวเทียมสองดวงที่เกี่ยวข้อง (และส่วนขยายของมัน) ก่อให้เกิดแกนของไฮเปอร์โบโลอิด ตัวรับตั้งอยู่ที่จุดที่ไฮเปอร์โบโลอิดสามเส้นตัดกัน[ 88 ] [ 89 ]
บางครั้งมีการกล่าวอ้างอย่างไม่ถูกต้องว่าตำแหน่งของผู้ใช้นั้นอยู่ที่จุดตัดของทรงกลมสามลูก แม้ว่าจะมองเห็นภาพได้ง่ายกว่า แต่จะเป็นเช่นนั้นก็ต่อเมื่อตัวรับสัญญาณมีนาฬิกาที่ซิงโครไนซ์กับนาฬิกาของดาวเทียม (กล่าวคือ ตัวรับสัญญาณวัดระยะทางจริงไปยังดาวเทียม แทนที่จะวัดความแตกต่างของระยะทาง) การที่ผู้ใช้พกนาฬิกาที่ซิงโครไนซ์กับดาวเทียมนั้นมีข้อดีด้านประสิทธิภาพอย่างเห็นได้ชัด ประการแรกคือ ต้องการดาวเทียมเพียงสามดวงในการคำนวณตำแหน่ง หากเป็นส่วนสำคัญของแนวคิด GPS ที่ผู้ใช้ทุกคนจำเป็นต้องพกนาฬิกาที่ซิงโครไนซ์ จำนวนดาวเทียมที่สามารถติดตั้งได้ก็จะน้อยลง แต่ต้นทุนและความซับซ้อนของอุปกรณ์ของผู้ใช้ก็จะเพิ่มขึ้น
เครื่องรับทำงานอย่างต่อเนื่อง
คำอธิบายข้างต้นเป็นตัวอย่างสถานการณ์การเริ่มต้นทำงานของเครื่องรับสัญญาณ เครื่องรับสัญญาณส่วนใหญ่มีอัลกอริทึมติดตามซึ่งบางครั้งเรียกว่าตัวติดตาม (tracker ) ที่รวมชุดการวัดจากดาวเทียมที่รวบรวมได้ในเวลาต่างๆ กัน โดยใช้ประโยชน์จากข้อเท็จจริงที่ว่าตำแหน่งของเครื่องรับสัญญาณที่ต่อเนื่องกันมักจะอยู่ใกล้กัน หลังจากประมวลผลชุดการวัดแล้ว ตัวติดตามจะคาดการณ์ตำแหน่งของเครื่องรับสัญญาณที่สอดคล้องกับชุดการวัดจากดาวเทียมชุดถัดไป เมื่อรวบรวมการวัดใหม่แล้ว เครื่องรับสัญญาณจะใช้แผนการถ่วงน้ำหนักเพื่อรวมการวัดใหม่เข้ากับการคาดการณ์ของตัวติดตาม โดยทั่วไปแล้ว ตัวติดตามสามารถ (ก) ปรับปรุงความแม่นยำของตำแหน่งและเวลาของเครื่องรับสัญญาณ (ข) ปฏิเสธการวัดที่ไม่ดี และ (ค) ประมาณความเร็วและทิศทางของเครื่องรับสัญญาณ
ข้อเสียของตัวติดตามคือการเปลี่ยนแปลงความเร็วหรือทิศทางสามารถคำนวณได้โดยมีความล่าช้า และทิศทางที่ได้มาจะไม่ถูกต้องเมื่อระยะทางที่เดินทางระหว่างการวัดตำแหน่งสองครั้งลดลงต่ำกว่าหรือใกล้เคียงกับข้อผิดพลาดแบบสุ่มของการวัดตำแหน่ง หน่วย GPS สามารถใช้การวัดการเลื่อนดอปเปลอร์ของสัญญาณที่ได้รับเพื่อคำนวณความเร็วได้อย่างแม่นยำ[ 90 ]ระบบนำทางขั้นสูงกว่าจะใช้เซ็นเซอร์เพิ่มเติม เช่นเข็มทิศหรือระบบนำทางเฉื่อยเพื่อเสริม GPS
แอปพลิเคชันที่ไม่เกี่ยวกับการนำทาง
ระบบ GPS ต้องการดาวเทียมอย่างน้อยสี่ดวงขึ้นไปที่มองเห็นได้เพื่อการนำทางที่แม่นยำ[ 91 ]การแก้สมการการนำทางจะให้ตำแหน่งของเครื่องรับพร้อมกับความแตกต่างระหว่างเวลาที่นาฬิกาภายในเครื่องรับรักษาไว้กับเวลาจริงของวัน ซึ่งทำให้ไม่จำเป็นต้องใช้นาฬิกาบนเครื่องรับที่มีความแม่นยำกว่าและอาจใช้งานจริงไม่ได้ การใช้งาน GPS เช่นการถ่ายโอนเวลาการกำหนดเวลาสัญญาณไฟจราจร และการซิงโครไนซ์สถานีฐานโทรศัพท์มือถือ ใช้ประโยชน์จากการกำหนดเวลาที่แม่นยำและราคาถูกนี้ แอปพลิเคชัน GPS บางแอปพลิเคชันใช้เวลานี้สำหรับการแสดงผล หรือนอกเหนือจากการคำนวณตำแหน่งพื้นฐานแล้ว ก็ไม่ได้ใช้เวลานี้เลย
แม้ว่าโดยปกติแล้วจะต้องใช้ดาวเทียมสี่ดวงสำหรับการทำงาน แต่ในกรณีพิเศษอาจใช้น้อยกว่านั้น หากทราบตัวแปรหนึ่งแล้ว เครื่องรับสามารถกำหนดตำแหน่งได้โดยใช้ดาวเทียมเพียงสามดวง ตัวอย่างเช่น เรือในมหาสมุทรเปิดมักจะมีระดับความสูงที่ทราบแล้วใกล้เคียงกับ 0 เมตรและระดับความสูงของเครื่องบินอาจเป็นที่ทราบแล้ว[ a ]เครื่องรับ GPS บางเครื่องอาจใช้เบาะแสหรือข้อสันนิษฐานเพิ่มเติม เช่น การใช้ระดับความสูงที่ทราบครั้งล่าสุด การคำนวณตำแหน่งโดยประมาณ การนำทางแบบเฉื่อยหรือการรวมข้อมูลจากคอมพิวเตอร์ของยานพาหนะ เพื่อให้ได้ตำแหน่ง (ที่อาจลดทอนลง) เมื่อมองเห็นดาวเทียมน้อยกว่าสี่ดวง[ 92 ] [ 93 ] [ 94 ]
โครงสร้าง
ระบบ GPS ในปัจจุบันประกอบด้วยส่วนหลัก 3 ส่วน ได้แก่ ส่วนอวกาศ ส่วนควบคุม และส่วนผู้ใช้[ 60 ] [ 95 ]กองทัพอวกาศสหรัฐฯเป็นผู้พัฒนา บำรุงรักษา และดำเนินการส่วนอวกาศและส่วนควบคุม[ 96 ]ดาวเทียม GPS ส่งสัญญาณจากอวกาศ และเครื่องรับ GPS แต่ละเครื่องใช้สัญญาณเหล่านี้ในการคำนวณตำแหน่งสามมิติ (ละติจูด ลองจิจูด และระดับความสูง) และเวลาปัจจุบัน[ 97 ]
ส่วนของอวกาศ


ส่วนอวกาศ (SS) ประกอบด้วยดาวเทียมหรือยานอวกาศ (SV) จำนวน 24 ถึง 32 ดวง ในวงโคจรระดับกลางของโลกและยังรวมถึงอะแดปเตอร์บรรทุกสัมภาระสำหรับจรวดที่จำเป็นในการปล่อยดาวเทียมขึ้นสู่วงโคจรด้วย[ 98 ] เดิมทีการออกแบบ GPS กำหนดให้มี SV จำนวน 24 ดวง โดยแต่ละดวง มีวงโคจรเป็นวงกลมประมาณ 3 วง[ 99 ]แต่ได้มีการปรับเปลี่ยนเป็นระนาบวงโคจร 6 ระนาบ โดยแต่ละระนาบมีดาวเทียม 4 ดวง[ 100 ]ระนาบวงโคจรทั้ง 6 ระนาบมีความเอียง (มุมเอียงเทียบกับ เส้นศูนย์สูตรของโลก) ประมาณ 55° และแยกจากกันด้วยไรต์แอสเซนชัน 60° ของจุดขึ้น (มุมตามเส้นศูนย์สูตรจากจุดอ้างอิงไปยังจุดตัดของวงโคจร) [ 101 ]ระยะเวลาการโคจรคือครึ่งหนึ่งของวันดาราศาสตร์ประมาณ 11 ชั่วโมง 58 นาที เพื่อให้ดาวเทียมโคจรผ่านตำแหน่งเดิม[ 102 ]หรือเกือบจะตำแหน่งเดิม[ 103 ]ทุกวัน วงโคจรถูกจัดเรียงเพื่อให้ดาวเทียมอย่างน้อยหกดวงอยู่ในแนวสายตาจากทุกที่บนพื้นผิวโลกเสมอ (ดูภาพเคลื่อนไหวทางด้านขวา) [ 104 ]ผลลัพธ์ของวัตถุประสงค์นี้คือดาวเทียมทั้งสี่ดวงไม่ได้เว้นระยะห่างเท่าๆ กัน (90°) ภายในแต่ละวงโคจร โดยทั่วไปแล้ว ความแตกต่างเชิงมุมระหว่างดาวเทียมในแต่ละวงโคจรคือ 30°, 105°, 120° และ 105° ซึ่งรวมกันได้ 360° [ 105 ]
โคจรที่ระดับความสูงประมาณ 20,200 กม. (12,600 ไมล์) รัศมีวงโคจรประมาณ 26,600 กม. (16,500 ไมล์) [ 106 ]ดาวเทียมแต่ละดวงโคจรครบสองรอบในแต่ละวันดาราศาสตร์โดยโคจรตามเส้นทาง เดิม ทุกวัน[ 107 ]ซึ่งเป็นประโยชน์อย่างมากในระหว่างการพัฒนา เพราะแม้จะมีดาวเทียมเพียงสี่ดวง การจัดเรียงที่ถูกต้องหมายความว่าดาวเทียมทั้งสี่ดวงสามารถมองเห็นได้จากจุดเดียวเป็นเวลาสองสามชั่วโมงในแต่ละวัน สำหรับปฏิบัติการทางทหาร การโคจรตามเส้นทางเดิมสามารถใช้เพื่อให้แน่ใจว่ามีการครอบคลุมที่ดีในเขตสู้รบ
ณ เดือนกุมภาพันธ์ พ.ศ. 2562 [ 108 ]มีดาวเทียม 31 ดวงในกลุ่มดาวเทียม GPS โดย 27 ดวงใช้งานในเวลาใดเวลาหนึ่ง ส่วนที่เหลือจัดสรรไว้เป็นดาวเทียมสำรอง ดาวเทียมดวงที่ 32 ถูกปล่อยขึ้นสู่อวกาศในปี พ.ศ. 2561 แต่ ณ เดือนกรกฎาคม พ.ศ. 2562 ยังอยู่ระหว่างการประเมิน ดาวเทียมที่ปลดประจำการแล้วจำนวนมากยังคงอยู่ในวงโคจรและพร้อมใช้งานเป็นอะไหล่ ดาวเทียมเพิ่มเติมเหล่านี้ช่วยเพิ่มความแม่นยำของการคำนวณของเครื่องรับ GPS โดยการให้การวัดที่ซ้ำซ้อน ด้วยจำนวนดาวเทียมที่เพิ่มขึ้น กลุ่มดาวเทียมจึงถูกเปลี่ยนเป็นการจัดเรียงแบบไม่สม่ำเสมอ การจัดเรียงแบบนี้แสดงให้เห็นว่าช่วยปรับปรุงความแม่นยำ แต่ยังช่วยปรับปรุงความน่าเชื่อถือและความพร้อมใช้งานของระบบ เมื่อเทียบกับระบบแบบสม่ำเสมอ เมื่อดาวเทียมหลายดวงล้มเหลว[ 109 ]ด้วยกลุ่มดาวเทียมที่ขยายออกไป โดยปกติแล้วจะสามารถมองเห็นดาวเทียมได้ 9 ดวงในเวลาใดก็ได้จากจุดใดก็ได้บนโลกที่มีขอบฟ้าที่ชัดเจน ทำให้มั่นใจได้ถึงความซ้ำซ้อนที่มากกว่าดาวเทียมขั้นต่ำ 4 ดวงที่จำเป็นสำหรับการระบุตำแหน่ง
ส่วนควบคุม

ส่วนควบคุม (CS) ประกอบด้วย:
- สถานีควบคุมหลัก (MCS)
- สถานีควบคุมหลักทางเลือก
- เสาอากาศภาคพื้นดินเฉพาะสี่ต้น และ
- สถานีตรวจสอบเฉพาะจำนวน 6 สถานี
MCS ยังสามารถเข้าถึง เสาอากาศภาคพื้นดินของ เครือข่ายควบคุมดาวเทียม (SCN) (เพื่อความสามารถในการสั่งการและควบคุมเพิ่มเติม) และสถานีตรวจสอบของ NGA ( National Geospatial-Intelligence Agency ) เส้นทางการบินของดาวเทียมจะถูกติดตามโดยสถานีตรวจสอบเฉพาะของกองทัพอวกาศสหรัฐฯ ในฮาวายเกาะควาจา เลน เกาะ แอสเซนชันดิเอโก การ์ เซี ยโคโลราโดสปริงส์ โคโลราโดและเคปคานาเวรัลฟลอริดา พร้อมกับสถานีตรวจสอบ NGA ที่ใช้ร่วมกันซึ่งดำเนินการในอังกฤษ อาร์เจนตินา เอกวาดอร์ บาห์เรน ออสเตรเลีย และวอชิงตัน ดี.ซี. [ 110 ]ข้อมูลการติดตามจะถูกส่งไปยัง MCS ที่ฐานทัพอวกาศชรีเวอร์ซึ่งอยู่ห่างจากโคโลราโดสปริงส์ไปทางตะวันออกเฉียงใต้ 25 กม. (16 ไมล์) ซึ่งดำเนินการโดยกองบินปฏิบัติการอวกาศที่ 2 (2 SOPS) ของกองทัพอวกาศสหรัฐฯ จากนั้น SOPS 2 เครื่องจะติดต่อดาวเทียม GPS แต่ละดวงเป็นประจำด้วยการอัปเดตการนำทางโดยใช้เสาอากาศภาคพื้นดินเฉพาะหรือร่วม (AFSCN) (เสาอากาศภาคพื้นดินเฉพาะของ GPS ตั้งอยู่ที่Kwajalein , เกาะ Ascension , Diego GarciaและCape Canaveral ) การอัปเดตเหล่านี้จะซิงโครไนซ์นาฬิกาอะตอมบนดาวเทียมให้มีความคลาดเคลื่อนเพียงไม่กี่นาโนวินาทีและปรับephemerisของแบบจำลองวงโคจรภายในของดาวเทียมแต่ละดวง การอัปเดตเหล่านี้สร้างขึ้นโดยตัวกรอง Kalmanที่ใช้ข้อมูลป้อนเข้าจากสถานีตรวจสอบภาคพื้นดิน ข้อมูล สภาพอากาศในอวกาศและข้อมูลป้อนเข้าอื่นๆ[ 111 ]
เมื่อมีการปรับวงโคจรของดาวเทียม ดาวเทียมจะถูกทำเครื่องหมายว่าไม่สมบูรณ์ทำให้เครื่องรับสัญญาณไม่สามารถใช้งานได้ หลังจากทำการปรับวงโคจรแล้ว วิศวกรจะติดตามวงโคจรใหม่จากภาคพื้นดิน อัปโหลดข้อมูลวงโคจรใหม่ และทำเครื่องหมายดาวเทียมว่าสมบูรณ์อีกครั้ง ปัจจุบันส่วนควบคุมการปฏิบัติงาน (OCS) ทำหน้าที่เป็นส่วนควบคุมหลัก โดยให้ความสามารถในการปฏิบัติงานที่สนับสนุนผู้ใช้ GPS และทำให้ GPS สามารถทำงานได้และเป็นไปตามข้อกำหนด
ระบบ OCS ได้เข้ามาแทนที่คอมพิวเตอร์เมนเฟรมรุ่นเก่าจากยุค 1970 ที่ฐานทัพอากาศชรีเวอร์ในเดือนกันยายน ปี 2007 หลังจากการติดตั้ง ระบบดังกล่าวช่วยให้สามารถอัปเกรดและวางรากฐานสำหรับสถาปัตยกรรมความปลอดภัยใหม่ที่สนับสนุนกองทัพสหรัฐฯ
OCS จะยังคงเป็นระบบควบคุมภาคพื้นดินหลักจนกว่าส่วนใหม่ ระบบควบคุมการปฏิบัติงาน GPS รุ่นต่อไป[ 11 ] (OCX) จะได้รับการพัฒนาและใช้งานได้อย่างสมบูรณ์ กระทรวงกลาโหมสหรัฐฯ อ้างว่าความสามารถใหม่ที่ OCX มอบให้จะเป็นรากฐานสำคัญในการเพิ่มขีดความสามารถในการปฏิบัติภารกิจของ GPS ทำให้กองทัพอวกาศสหรัฐฯ สามารถยกระดับบริการปฏิบัติการ GPS ให้แก่กองกำลังรบของสหรัฐฯ พันธมิตรพลเรือน และผู้ใช้ทั้งในประเทศและต่างประเทศ[ 112 ] [ 113 ]โครงการ GPS OCX ยังจะช่วยลดต้นทุน กำหนดการ และความเสี่ยงทางเทคนิค โดยได้รับการออกแบบมาเพื่อให้ประหยัดต้นทุนการบำรุงรักษาได้ 50% [ 114 ]ผ่านสถาปัตยกรรมซอฟต์แวร์ที่มีประสิทธิภาพและโลจิสติกส์ตามประสิทธิภาพ นอกจากนี้ คาดว่า GPS OCX จะมีต้นทุนน้อยกว่าการอัพเกรด OCS หลายล้านดอลลาร์ ในขณะที่ให้ความสามารถมากกว่าถึงสี่เท่า
โครงการ GPS OCX เป็นส่วนสำคัญอย่างยิ่งของการปรับปรุงระบบ GPS ให้ทันสมัย และช่วยเพิ่มความปลอดภัยของข้อมูลได้ดีกว่าโครงการ GPS OCS ในปัจจุบัน
- OCX จะมีความสามารถในการควบคุมและจัดการดาวเทียม GPS รุ่นเก่า รวมถึงดาวเทียม GPS III รุ่นใหม่ พร้อมทั้งรองรับสัญญาณทางทหารได้อย่างครบถ้วน
- สร้างขึ้นบนสถาปัตยกรรมที่ยืดหยุ่นซึ่งสามารถปรับตัวได้อย่างรวดเร็วตามความต้องการที่เปลี่ยนแปลงไปของผู้ใช้ GPS ช่วยให้เข้าถึงข้อมูล GPS และสถานะกลุ่มดาวเทียมได้ทันทีผ่านข้อมูลที่ปลอดภัย แม่นยำ และเชื่อถือได้
- ช่วยให้ทหารได้รับข้อมูลที่ปลอดภัย นำไปใช้ได้จริง และคาดการณ์ได้ดียิ่งขึ้น เพื่อเพิ่มความตระหนักรู้ในสถานการณ์
- รองรับสัญญาณรุ่นใหม่ที่ทันสมัย (L1C, L2C และ L5) และมีความสามารถในการส่ง M-code ซึ่งระบบเดิมไม่สามารถทำได้
- โปรแกรมนี้ช่วยเพิ่มประสิทธิภาพด้านความปลอดภัยของข้อมูลได้อย่างมากเมื่อเทียบกับโปรแกรมปัจจุบัน รวมถึงการตรวจจับและป้องกันการโจมตีทางไซเบอร์ พร้อมทั้งแยกส่วน ควบคุม และดำเนินการต่อไปได้ในระหว่างการโจมตีเหล่านั้น
- รองรับความสามารถในการสั่งการและควบคุมแบบเรียลไทม์ในปริมาณมากได้เป็นอย่างดี
เมื่อวันที่ 14 กันยายน พ.ศ. 2554 [ 115 ]กองทัพอากาศสหรัฐฯ ประกาศเสร็จสิ้นการตรวจสอบการออกแบบเบื้องต้นของ GPS OCX และยืนยันว่าโครงการ OCX พร้อมสำหรับขั้นตอนการพัฒนาต่อไป โครงการ GPS OCX พลาดเป้าหมายสำคัญหลายประการและเลื่อนการเปิดตัวไปเป็นปี 2564 ซึ่งเลยกำหนดเดิมไป 5 ปี ตามรายงานของสำนักงานบัญชีรัฐบาลในปี พ.ศ. 2562 กำหนดเส้นตายปี 2564 ดูไม่แน่นอน[ 116 ]
โครงการยังคงล่าช้าในปี 2023 และ (ณ เดือนมิถุนายน 2023) มีค่าใช้จ่ายเกินกว่างบประมาณที่ประเมินไว้เดิมถึง 73% [ 117 ] [ 118 ]ในช่วงปลายปี 2023 แฟรงค์ คัลเวลลี ผู้ช่วยเลขานุการกองทัพอากาศฝ่ายจัดซื้อและบูรณาการด้านอวกาศ กล่าวว่าโครงการคาดว่าจะเปิดใช้งานได้ในช่วงฤดูร้อนของปี 2024 [ 119 ]
กองทัพอวกาศสหรัฐฯ รับมอบระบบ OCX Blocks I และ II จากบริษัทผู้รับเหมา RTX เมื่อวันที่ 1 กรกฎาคม 2025 ซึ่งล่าช้ากว่ากำหนดการถึง 8 ปี และใช้งบประมาณเกินกว่าที่กำหนดไว้ประมาณ 4 พันล้านดอลลาร์ เนื่องจากกระบวนการพัฒนาที่ซับซ้อนและฟีเจอร์ที่เพิ่มขึ้นเรื่อยๆ หากการประเมินของสำนักงานตรวจสอบบัญชีภาครัฐ (Government Accountability Office) เป็นไปตามที่คาดการณ์ไว้ ระบบใหม่นี้จะเริ่มใช้งานได้ในเดือนธันวาคม 2025
ปัจจุบัน OCX Block 3F อยู่ระหว่างการพัฒนาเพื่อเปิดใช้งานการสั่งการและควบคุมดาวเทียม GPS IIIF ซึ่งมีกำหนดเริ่มปล่อยในปี 2027 [ 120 ]
กลุ่มผู้ใช้


กลุ่มผู้ใช้งาน (สหรัฐอเมริกา) ประกอบด้วยผู้ใช้งานทางทหารของสหรัฐฯ และพันธมิตรหลายแสนคนที่ใช้บริการระบุตำแหน่งแม่นยำ GPS ที่ปลอดภัย และผู้ใช้งานพลเรือน พาณิชย์ และวิทยาศาสตร์หลายสิบล้านคนที่ใช้บริการระบุตำแหน่งมาตรฐาน โดยทั่วไปแล้ว เครื่องรับสัญญาณ GPS ประกอบด้วยเสาอากาศที่ปรับให้เข้ากับความถี่ที่ส่งมาจากดาวเทียม ตัวประมวลผลรับสัญญาณ และนาฬิกาที่มีความเสถียรสูง (มักเป็นออสซิลเลเตอร์แบบคริสตัล ) นอกจากนี้ยังอาจมีจอแสดงผลสำหรับแสดงข้อมูลตำแหน่งและความเร็วแก่ผู้ใช้งานด้วย
เครื่องรับ GPS อาจมีอินพุตสำหรับการแก้ไขความแตกต่างโดยใช้ รูปแบบ RTCM SC-104 ซึ่งโดยทั่วไปจะอยู่ในรูปแบบ พอร์ต RS-232ที่ความเร็ว 4,800 บิต/วินาที ข้อมูลจะถูกส่งจริงในอัตราที่ต่ำกว่ามาก ซึ่งจำกัดความแม่นยำของสัญญาณที่ส่งโดยใช้ RTCM [ 121 ] [ 122 ]เครื่องรับที่มีเครื่องรับ DGPS ภายในสามารถทำงานได้ดีกว่าเครื่องที่ใช้ข้อมูล RTCM ภายนอก ณ ปี 2549 แม้แต่เครื่องราคาประหยัดก็มักจะมี เครื่องรับ Wide Area Augmentation System (WAAS) รวมอยู่ด้วย

เครื่องรับ GPS จำนวนมากสามารถส่งต่อข้อมูลตำแหน่งไปยังพีซีหรืออุปกรณ์อื่นโดยใช้ โปรโตคอล NMEA 0183แม้ว่าโปรโตคอลนี้จะได้รับการกำหนดอย่างเป็นทางการโดยสมาคมอิเล็กทรอนิกส์ทางทะเลแห่งชาติ (NMEA) [ 123 ]แต่ข้อมูลอ้างอิงถึงโปรโตคอลนี้ได้รับการรวบรวมจากบันทึกสาธารณะ ทำให้เครื่องมือโอเพนซอร์สเช่นgpsdสามารถอ่านโปรโตคอลได้โดยไม่ละเมิดกฎหมายทรัพย์สินทางปัญญา นอกจากนี้ยังมีโปรโตคอลที่เป็นกรรมสิทธิ์อื่นๆ เช่น โปรโตคอล SiRFและMTK เครื่องรับสามารถเชื่อมต่อกับอุปกรณ์อื่นๆ ได้โดยใช้วิธีการต่างๆ รวมถึงการ เชื่อม ต่อแบบอนุกรมUSBหรือBluetooth
แอปพลิเคชัน
แม้ว่าเดิมทีจะเป็นโครงการทางทหาร แต่ GPS ถือเป็นเทคโนโลยีแบบใช้งานได้สองทางหมายความว่ามีการใช้งานในภาคพลเรือนที่สำคัญเช่นกัน[ 124 ]
GPS ได้กลายเป็นเครื่องมือที่มีการใช้งานอย่างแพร่หลายและมีประโยชน์สำหรับการค้า การใช้งานทางวิทยาศาสตร์ การติดตาม และการเฝ้าระวัง เวลาที่แม่นยำของ GPS ช่วยอำนวยความสะดวกในกิจกรรมประจำวัน เช่น การทำธุรกรรมทางการเงิน การใช้งานโทรศัพท์มือถือ และแม้กระทั่งการควบคุมโครงข่ายไฟฟ้าโดยอนุญาตให้มีการสลับการทำงานที่ซิงโครไนซ์กันได้ดี[ 97 ]
พลเรือน


แอปพลิเคชันพลเรือนจำนวนมากใช้ส่วนประกอบพื้นฐานอย่างน้อยหนึ่งอย่างของ GPS ได้แก่ ตำแหน่งสัมบูรณ์ การเคลื่อนที่สัมพัทธ์ และการถ่ายโอนเวลา
- วิทยุสมัครเล่น : จำเป็นต้องมีการซิงโครไนซ์นาฬิกาสำหรับโหมดดิจิทัลหลายโหมด เช่นFT8 , FT4 และ JS8 นอกจากนี้ยังใช้ร่วมกับAPRSสำหรับการรายงานตำแหน่ง และมักมีความสำคัญอย่างยิ่งในการสนับสนุนการสื่อสารในกรณีฉุกเฉินและภัยพิบัติ
- บรรยากาศ : การศึกษา ความล่าช้าของ โทรโปสเฟียร์ (การฟื้นตัวของปริมาณไอน้ำ) และ ความล่าช้า ของไอโอโนสเฟียร์ (การฟื้นตัวของจำนวนอิเล็กตรอนอิสระ) [ 125 ]การฟื้นตัวของการเคลื่อนที่ของพื้นผิวโลกเนื่องจากภาระความดันบรรยากาศ[ 126 ]
- ดาราศาสตร์ : ทั้ง ข้อมูลตำแหน่งและการซิงโครไนซ์นาฬิกา ถูกนำมาใช้ใน การวัดตำแหน่งทางดาราศาสตร์และกลศาสตร์ท้องฟ้าและการกำหนดวงโคจรที่แม่นยำ[ 127 ] GPS ยังถูกใช้ในดาราศาสตร์สมัครเล่นด้วยกล้องโทรทรรศน์ขนาดเล็กรวมถึงหอดูดาวมืออาชีพเพื่อค้นหาดาวเคราะห์นอกระบบสุริยะ
- ยานพาหนะอัตโนมัติ : การประยุกต์ใช้ตำแหน่งยานพาหนะที่แม่นยำ ควบคู่กับแผนที่ที่มีรายละเอียดสูงจะให้บริบทที่จำเป็นสำหรับรถยนต์และรถบรรทุกในการทำงานโดยไม่ต้องมีคนขับ[ 128 ]
- การทำแผนที่ : ทั้งนักทำแผนที่พลเรือนและนักทำแผนที่ทางทหารใช้ GPS อย่างแพร่หลาย
- โทรศัพท์มือถือ : การซิงโครไนซ์นาฬิกาช่วยให้สามารถถ่ายโอนเวลาได้ ซึ่งมีความสำคัญอย่างยิ่งต่อการซิงโครไนซ์รหัสการกระจายสัญญาณกับสถานีฐานอื่นๆ เพื่ออำนวยความสะดวกในการส่งต่อสัญญาณระหว่างเซลล์ และรองรับการตรวจจับตำแหน่งแบบไฮบริด GPS/เซลลูลาร์สำหรับการโทรฉุกเฉินผ่านมือถือและแอปพลิเคชันอื่นๆโทรศัพท์มือถือเครื่องแรกที่มี GPSในตัวเปิดตัวในช่วงปลายทศวรรษ 1990 คณะกรรมการการสื่อสารแห่ง สหรัฐอเมริกา (FCC) กำหนดให้มีคุณสมบัตินี้ในโทรศัพท์มือถือหรือในเสาสัญญาณ (เพื่อใช้ในการหาตำแหน่งโดยใช้สามเหลี่ยม) ในปี 2002 เพื่อให้หน่วยบริการฉุกเฉินสามารถระบุตำแหน่งผู้โทร 911 ได้ ต่อมานักพัฒนาซอฟต์แวร์บุคคลที่สามได้รับสิทธิ์เข้าถึง API ของ GPS จากNextelเมื่อเปิดตัว ตามด้วยSprintในปี 2006 และVerizonในเวลาต่อมาไม่นาน
- การซิงโครไนซ์นาฬิกา : ความแม่นยำของสัญญาณเวลา GPS (±10 ns) [ 129 ]เป็นรองเพียงนาฬิกาอะตอมที่ใช้เป็นพื้นฐาน และใช้ในแอปพลิเคชันต่างๆ เช่น ออสซิลเลเตอร์ที่มีระเบียบ วินัยของ GPS
- การบรรเทาภัยพิบัติ / บริการฉุกเฉิน : บริการฉุกเฉินหลายอย่างต้องพึ่งพา GPS ในการระบุตำแหน่งและเวลา
- เครื่องวัดความดันบรรยากาศและ เครื่องวัดความดัน บรรยากาศแบบหย่อนลงที่ติดตั้ง GPS : วัดและคำนวณความดันบรรยากาศ ความเร็วลม และทิศทางลมได้สูงถึง 27 กิโลเมตร (89,000 ฟุต) จากพื้นผิวโลก
- การบังแสงวิทยุสำหรับการประยุกต์ใช้ด้านสภาพอากาศและวิทยาศาสตร์บรรยากาศ[ 130 ]
- ระบบติดตามยานพาหนะ : ใช้เพื่อระบุตำแหน่งและบันทึกรายงานการติดต่อกับ ยานพาหนะในกอง fleetsตั้งแต่หนึ่งคันขึ้นไปแบบเรียลไทม์
- ธรณีวิทยา : การกำหนดพารามิเตอร์การวางแนวของโลกรวมถึงการเคลื่อนที่ของขั้วโลกรายวันและย่อยรายวัน[ 131 ]และความแปรปรวนของความยาวของวัน[ 132 ]การเคลื่อนที่ของศูนย์กลางมวลของโลก – ศูนย์กลางโลก[ 133 ]และพารามิเตอร์สนามแรงโน้มถ่วงระดับต่ำ[ 134 ]
- การกำหนดขอบเขตทางภูมิศาสตร์ : ระบบติดตามยานพาหนะระบบติดตามบุคคลและ ระบบ ติดตามสัตว์เลี้ยงใช้ GPS เพื่อระบุตำแหน่งอุปกรณ์ที่ติดอยู่กับหรือพกพาโดยบุคคล ยานพาหนะ หรือสัตว์เลี้ยง แอปพลิเคชันสามารถติดตามอย่างต่อเนื่องและส่งการแจ้งเตือนหากเป้าหมายออกจากพื้นที่ที่กำหนด (หรือ "พื้นที่ที่มีรั้วกั้น") [ 135 ]
- การติดแท็กตำแหน่งทางภูมิศาสตร์ (Geotagging ): คือการใส่พิกัดตำแหน่งลงในวัตถุดิจิทัล เช่น ภาพถ่าย (ใน ข้อมูล Exif ) และเอกสารอื่นๆ เพื่อวัตถุประสงค์ต่างๆ เช่น การสร้างแผนที่ซ้อนทับด้วยอุปกรณ์อย่างNikon GP- 1
- ระบบติดตามเครื่องบินด้วย GPS
- GPS สำหรับการทำเหมือง: การใช้ RTK GPS ได้ปรับปรุงการดำเนินงานด้านการทำเหมืองหลายอย่างอย่างมีนัยสำคัญ เช่น การเจาะ การขุด การติดตามยานพาหนะ และการสำรวจ RTK GPS ให้ความแม่นยำในการกำหนดตำแหน่งในระดับเซนติเมตร[ 136 ] [ 137 ]
- การขุดค้นข้อมูล GPS: เป็นไปได้ที่จะรวบรวมข้อมูล GPS จากผู้ใช้หลายคนเพื่อทำความเข้าใจรูปแบบการเคลื่อนไหว เส้นทางทั่วไป และสถานที่ที่น่าสนใจ[ 138 ]ปัจจุบันมีการใช้ข้อมูล GPS ในด้านการขนส่งและวิศวกรรมภัยพิบัติเพื่อพยากรณ์การเคลื่อนที่ในสถานการณ์ปกติและสถานการณ์อพยพ (เช่น พายุเฮอริเคน ไฟป่า แผ่นดินไหว) [ 139 ] [ 140 ] [ 141 ] [ 142 ]
- ทัวร์ GPS : ตำแหน่งที่ตั้งจะเป็นตัวกำหนดเนื้อหาที่จะแสดง ตัวอย่างเช่น ข้อมูลเกี่ยวกับสถานที่น่าสนใจที่กำลังจะมาถึง
- สุขภาพจิต : การติดตามการทำงานของสุขภาพจิตและการเข้าสังคม[ 143 ]
- การนำทาง : นักนำทางให้ความสำคัญกับการวัดความเร็วและทิศทางที่แม่นยำแบบดิจิทัล รวมถึงตำแหน่งที่แม่นยำแบบเรียลไทม์ พร้อมการสนับสนุนการแก้ไขวงโคจรและนาฬิกา[ 144 ]
- การกำหนด วงโคจร ของดาวเทียมวงโคจรต่ำ ที่มีตัวรับสัญญาณ GPS ติดตั้งอยู่บนเครื่อง เช่นGOCE [ 145 ] GRACE , Jason-1 , Jason-2 , TerraSAR-X , TanDEM-X , CHAMP , Sentinel-3 , [ 146 ] และดาวเทียมคิวบ์แซทบาง ดวงเช่นCubETH
- การวัดเฟเซอร์ : GPS ช่วยให้สามารถบันทึกเวลาของการวัดระบบไฟฟ้าได้อย่างแม่นยำสูง ทำให้สามารถคำนวณเฟเซอร์ได้
- กิจกรรมนันทนาการ : ตัวอย่างเช่นการค้นหาพิกัดทางภูมิศาสตร์ (Geocaching) , การหาตำแหน่งพิกัดทางภูมิศาสตร์ (Geodashing) , การวาดภาพด้วย GPS , การทำเครื่องหมายเส้นทางและเกมมือถือที่ใช้ตำแหน่งที่ตั้ง อื่นๆ เช่นPokémon Go
- กรอบอ้างอิง : การสร้างและการเพิ่มความหนาแน่นของกรอบอ้างอิงภาคพื้นดิน[ 147 ]ในกรอบของระบบสังเกตการณ์ทางธรณีวิทยาโลก การวางตำแหน่งร่วมกันในอวกาศระหว่างการวัดระยะด้วยเลเซอร์จากดาวเทียม[ 148 ]และการสังเกตการณ์ด้วยคลื่นไมโครเวฟ[ 149 ]เพื่อหาพารามิเตอร์ทางธรณีวิทยาโลก[ 150 ] [ 151 ]
- วิทยาการหุ่นยนต์ : หุ่นยนต์อัตโนมัติที่นำทางด้วยตนเองโดยใช้เซ็นเซอร์ GPS [ 152 ]ซึ่งคำนวณละติจูด ลองจิจูด เวลา ความเร็ว และทิศทาง
- กีฬา: ใช้ในฟุตบอลและรักบี้เพื่อควบคุมและวิเคราะห์ภาระการฝึกซ้อม[ 153 ]
- การสำรวจที่ดิน : ผู้สำรวจใช้พิกัดสัมบูรณ์ในการสร้างแผนที่และกำหนดขอบเขตที่ดิน
- ธรณีวิทยาโครงสร้าง : GPS ช่วยให้สามารถวัดการเคลื่อนที่ของรอยเลื่อนโดยตรงของแผ่นดินไหวระหว่างแผ่นดินไหว GPS สามารถใช้ในการวัดการเคลื่อนที่และการเปลี่ยนแปลงรูปร่างของเปลือกโลก[ 154 ]เพื่อประมาณการการสะสมความเครียดจากแผ่นดินไหวสำหรับการสร้างแผนที่อันตรายจากแผ่นดินไหว
- เทเลเมติกส์ : เทคโนโลยี GPS ที่ผสานรวมเข้ากับคอมพิวเตอร์และเทคโนโลยีการสื่อสารเคลื่อนที่ในระบบนำทางรถยนต์
ข้อจำกัดในการใช้งานของพลเรือน
รัฐบาลสหรัฐฯ ควบคุมการส่งออกเครื่องรับสัญญาณพลเรือนบางประเภท เครื่องรับสัญญาณ GPS ทุกชนิดที่สามารถทำงานได้ที่ระดับความสูงเกิน18 กม. ( 60,000 ฟุต ) และความเร็วเกิน 515 ม./วินาที (1,854 กม./ชม.; 1,152 ไมล์/ชม.) หรือที่ออกแบบหรือดัดแปลงเพื่อใช้กับขีปนาวุธและอากาศยานไร้คนขับ จะถูกจัดประเภทเป็นกระสุน (อาวุธ) ซึ่งหมายความว่าต้องมีใบอนุญาตส่งออกจากกระทรวงการต่างประเทศ[ 155 ]กฎนี้ใช้บังคับแม้กระทั่งกับหน่วยพลเรือนล้วนๆ ที่รับเฉพาะความถี่ L1 และรหัส C/A (Coarse/Acquisition) เท่านั้น
การปิดใช้งานการทำงานที่เกินขีดจำกัดเหล่านี้จะทำให้เครื่องรับสัญญาณได้รับการยกเว้นจากการจัดประเภทเป็นกระสุน การตีความของผู้ผลิตแตกต่างกันไป กฎดังกล่าวอ้างถึงการทำงานที่ระดับความสูงและความเร็วเป้าหมาย แต่เครื่องรับสัญญาณบางรุ่นจะหยุดทำงานแม้ว่าจะอยู่นิ่งก็ตาม สิ่งนี้ทำให้เกิดปัญหาในการปล่อยบอลลูนวิทยุสมัครเล่นบางกลุ่มที่ขึ้นไปสูงถึง 30 กิโลเมตร (100,000 ฟุต) เป็นประจำ ข้อจำกัดเหล่านี้ใช้เฉพาะกับหน่วยหรือส่วนประกอบที่ส่งออกนอกสหรัฐอเมริกาเท่านั้น มีการค้าขายส่วนประกอบต่างๆ เพิ่มมากขึ้น รวมถึงหน่วย GPS จากประเทศอื่นๆ ซึ่งจำหน่ายโดยระบุว่าปลอด จาก ข้อกำหนด ITAR อย่างชัดเจน
ทหาร



ณ ปี 2009 การใช้งาน GPS ในกองทัพประกอบด้วย:
- การนำทาง: ทหารใช้ GPS เพื่อค้นหาเป้าหมาย แม้ในที่มืดหรือในพื้นที่ที่ไม่คุ้นเคย และเพื่อประสานงานการเคลื่อนย้ายกำลังพลและเสบียง ในกองทัพสหรัฐฯ ผู้บัญชาการใช้ผู้ช่วยดิจิทัลของผู้บัญชาการและทหารระดับล่างใช้ผู้ช่วยดิจิทัลของทหาร[ 156 ]
- การประสานงานนาฬิกาของวิทยุแบบเปลี่ยนความถี่: ระบบวิทยุทางทหารที่ใช้ โหมด เปลี่ยนความถี่เช่นSINCGARSและHAVEQUICKจำเป็นต้องให้วิทยุทุกเครื่องในเครือข่ายมีเวลาป้อนเข้าสู่นาฬิกาภายในตรงกัน (+/-4 วินาทีในกรณีของ SINCGARS) เพื่อให้สามารถใช้งานความถี่ที่ถูกต้องในเวลาที่กำหนดได้ เครื่องรับสัญญาณ GPS ทางทหาร เช่นPrecision Lightweight GPS Receiver (PLGR) และDefense Advanced GPS Receiver (DAGR) ถูกใช้โดยผู้ควบคุมวิทยุในเครือข่ายวิทยุเพื่อป้อนเวลาที่ถูกต้องไปยังนาฬิกาภายในของวิทยุเหล่านั้น วิทยุทางทหารรุ่นใหม่ๆ มีเครื่องรับสัญญาณ GPS ภายในที่ซิงโครไนซ์นาฬิกาภายในโดยอัตโนมัติ
- การติดตามเป้าหมาย: ระบบอาวุธทางทหารต่างๆ ใช้ GPS ในการติดตามเป้าหมายภาคพื้นดินและทางอากาศที่อาจเกิดขึ้นก่อนที่จะระบุว่าเป็นศัตรู[ 157 ] [ 158 ]ระบบอาวุธเหล่านี้ส่งพิกัดเป้าหมายไปยังกระสุนนำวิถีที่มีความแม่นยำสูงเพื่อให้สามารถโจมตีเป้าหมายได้อย่างแม่นยำ เครื่องบินทหาร โดยเฉพาะอย่างยิ่งใน บทบาท การโจมตีภาคพื้นดินใช้ GPS ในการค้นหาเป้าหมาย
- การนำทางขีปนาวุธและกระสุน: GPS ช่วยให้สามารถกำหนดเป้าหมายอาวุธทางทหารต่างๆ ได้อย่างแม่นยำ รวมถึงขีปนาวุธข้ามทวีป ขีปนาวุธร่อนกระสุนนำวิถีแม่นยำและกระสุนปืนใหญ่ตัวรับสัญญาณ GPS แบบฝังตัวที่สามารถทนต่อความเร่งได้ถึง 12,000 g [ 159 ]หรือประมาณ 118 กม./วินาที² (260,000 ไมล์/วินาที) ได้รับการพัฒนาขึ้นเพื่อใช้ใน กระสุนปืนใหญ่ขนาด 155 มิลลิเมตร (6.1 นิ้ว) [ 160 ]
- การค้นหาและกู้ภัย
- การลาดตระเวน: การเคลื่อนที่ของหน่วยลาดตระเวนสามารถควบคุมได้อย่างใกล้ชิดยิ่งขึ้น
- ดาวเทียม GPS บรรทุกชุดตรวจจับการระเบิดนิวเคลียร์ซึ่งประกอบด้วยเซ็นเซอร์แสงที่เรียกว่าbhangmeterเซ็นเซอร์รังสีเอ็กซ์ เครื่องวัดปริมาณรังสี และเซ็นเซอร์คลื่นแม่เหล็กไฟฟ้า (EMP) (W-sensor) ซึ่งเป็นส่วนสำคัญของระบบตรวจจับการระเบิดนิวเคลียร์ของสหรัฐอเมริกา[ 161 ] [ 162 ] พลเอกวิ ลเลียม เชลตัน ได้กล่าวว่าดาวเทียมในอนาคตอาจตัดคุณสมบัตินี้ออกเพื่อประหยัดค่าใช้จ่าย[ 163 ]
การนำทางแบบ GPS ถูกนำมาใช้ในสงครามครั้งแรกในสงครามอ่าวเปอร์เซียปี 1991ก่อนที่ GPS จะได้รับการพัฒนาอย่างสมบูรณ์ในปี 1995 เพื่อช่วยกองกำลังพันธมิตรในการนำทางและปฏิบัติการในสงคราม สงครามยังแสดงให้เห็นถึงความเปราะบางของ GPS ต่อการถูกรบกวนเมื่อกองกำลังอิรักติดตั้งอุปกรณ์รบกวนสัญญาณวิทยุในเป้าหมายที่คาดว่าจะเกิดการรบกวน ทำให้การรับสัญญาณ GPS ที่อ่อนแอถูกขัดขวาง[ 164 ]
ความเปราะบางของ GPS ต่อการรบกวนเป็นภัยคุกคามที่เพิ่มขึ้นเรื่อยๆ เนื่องจากการพัฒนาอุปกรณ์รบกวนและประสบการณ์ที่มากขึ้น[ 165 ] [ 166 ]มีรายงานว่าสัญญาณ GPS ถูกรบกวนหลายครั้งในช่วงหลายปีที่ผ่านมาเพื่อวัตถุประสงค์ทางทหาร รัสเซียดูเหมือนจะมีวัตถุประสงค์หลายประการสำหรับแนวทางนี้ เช่น การข่มขู่ประเทศเพื่อนบ้านในขณะที่บั่นทอนความเชื่อมั่นในการพึ่งพาระบบของอเมริกา การส่งเสริมทางเลือก GLONASS การขัดขวางการฝึกซ้อมทางทหารของชาตะวันตก และการปกป้องทรัพย์สินจากโดรน[ 167 ]จีนใช้การรบกวนเพื่อยับยั้งเครื่องบินสอดแนมของสหรัฐฯ ใกล้หมู่เกาะสแปรตลีที่ เป็นข้อพิพาท [ 168 ]เกาหลีเหนือได้ดำเนินการรบกวนครั้งใหญ่หลายครั้งใกล้ชายแดนกับเกาหลีใต้และนอกชายฝั่ง ทำให้เที่ยวบิน การขนส่ง และการประมงหยุดชะงัก[ 169 ]กองทัพอิหร่านรบกวน GPS ของเครื่องบินโดยสารพลเรือนเที่ยวบินPS752เมื่อยิงเครื่องบินลำนั้นตก[ 170 ] [ 171 ]
ในสงครามรัสเซีย-ยูเครนกระสุนนำวิถีด้วย GPS ที่ประเทศสมาชิกนาโต้จัดหาให้กับยูเครนประสบกับอัตราความล้มเหลวอย่างมีนัยสำคัญอันเป็นผลมาจากสงครามอิเล็กทรอนิกส์ของรัสเซีย อัตราประสิทธิภาพของกระสุนปืนใหญ่เอ็กซ์คาลิเบอร์ในการยิงโดนเป้าหมายลดลงจาก 70% เหลือ 6% เมื่อรัสเซียปรับเปลี่ยนกิจกรรมสงครามอิเล็กทรอนิกส์[ 172 ]
การจับเวลา
วินาทีอธิกสุรทิน
ในขณะที่นาฬิกาส่วนใหญ่ใช้เวลาอ้างอิงจากเวลาสากลเชิงพิกัด (UTC) นาฬิกาอะตอมบนดาวเทียมจะตั้งเวลาตามเวลา GPSความแตกต่างคือเวลา GPS ไม่ได้รับการแก้ไขให้ตรงกับการหมุนของโลก ดังนั้นจึงไม่มีวินาทีอธิกสุรทิน ใหม่ หรือการแก้ไขอื่นๆ ที่เพิ่มเข้าไปใน UTC เป็นระยะ เวลา GPS ถูกตั้งค่าให้ตรงกับ UTC ในปี 1980 แต่หลังจากนั้นก็เบี่ยงเบนไป การขาดการแก้ไขหมายความว่าเวลา GPS ยังคงมีค่าเบี่ยงเบนคงที่จากเวลาอะตอมสากล (TAI) (TAI – GPS = 19 วินาที) มีการแก้ไขเป็นระยะกับนาฬิกาบนดาวเทียมเพื่อให้ซิงโครไนซ์กับนาฬิกาภาคพื้นดิน[ 93 ] : ส่วนที่ 1.2.2
ข้อความนำทาง GPS ประกอบด้วยความแตกต่างระหว่างเวลา GPS และ UTC ณ เดือนมกราคม 2017 เวลา GPS จะเร็วกว่า UTC 18 วินาที เนื่องจากมีการเพิ่มวินาทีอธิกมาสให้กับ UTC ในวันที่ 31 ธันวาคม 2016 [ 173 ]เครื่องรับจะลบค่าชดเชยนี้ออกจากเวลา GPS เพื่อคำนวณค่า UTC และค่าเขตเวลาเฉพาะ หน่วย GPS ใหม่ๆ อาจไม่แสดงเวลา UTC ที่ถูกต้องจนกว่าจะได้รับข้อความชดเชย UTC ฟิลด์ชดเชย GPS-UTC สามารถรองรับวินาทีอธิกมาสได้ 255 วินาที (แปดบิต)
ความแม่นยำ
เวลา GPS มีความแม่นยำตามทฤษฎีประมาณ 14 นาโนวินาที เนื่องจากการเบี่ยงเบนของนาฬิกาเมื่อเทียบกับเวลาอะตอมสากลที่นาฬิกาอะตอมในเครื่องส่งสัญญาณ GPS ประสบ[ 174 ]เครื่องรับส่วนใหญ่สูญเสียความแม่นยำในการตีความสัญญาณและมีความแม่นยำเพียงประมาณ 100 นาโนวินาที[ 175 ] [ 176 ]
การแก้ไขเชิงสัมพัทธภาพ
ระบบ GPS ใช้การแก้ไขหลักสองประการกับสัญญาณเวลาเพื่อชดเชยผลกระทบเชิงสัมพัทธภาพ ได้แก่ การแก้ไขความเร็วสัมพัทธ์ระหว่างดาวเทียมและตัวรับสัญญาณโดยใช้ทฤษฎีสัมพัทธภาพพิเศษ และการแก้ไขความแตกต่างของศักย์โน้มถ่วงระหว่างดาวเทียมและตัวรับสัญญาณโดยใช้ทฤษฎีสัมพัทธภาพทั่วไป[ 21 ]นอกจากนี้ยังสามารถคำนวณความเร่งของดาวเทียมเป็นการแก้ไขแยกต่างหากได้ ขึ้นอยู่กับวัตถุประสงค์ แต่โดยปกติแล้วผลกระทบนี้จะได้รับการจัดการแล้วในการแก้ไขสองประการแรก[ 177 ] [ 178 ]
รูปแบบ
แตกต่างจาก ปฏิทินเกรกอเรียนที่ใช้รูปแบบปี เดือน และวัน วันที่ในระบบGPS จะแสดงเป็นหมายเลขสัปดาห์และหมายเลขวินาทีในสัปดาห์นั้น หมายเลขสัปดาห์จะถูกส่งเป็นฟิลด์สิบบิตในข้อความนำทาง C/A และ P(Y) ดังนั้นจึงกลายเป็นศูนย์อีกครั้งทุกๆ 1,024 สัปดาห์ (19.6 ปี) สัปดาห์ที่ศูนย์ของ GPS เริ่มต้นที่ 00:00:00 UTC (00:00:19 TAI) ในวันที่ 6 มกราคม 1980 และหมายเลขสัปดาห์กลายเป็นศูนย์อีกครั้งเป็นครั้งแรกที่ 23:59:47 UTC ในวันที่ 21 สิงหาคม 1999 (00:00:19 TAI ในวันที่ 22 สิงหาคม 1999) เหตุการณ์นี้เกิดขึ้นครั้งที่สองเวลา 23:59:42 UTC ในวันที่ 6 เมษายน 2562 ในการกำหนดวันที่ตามปฏิทินเกรกอเรียนปัจจุบัน ตัวรับสัญญาณ GPS จะต้องได้รับข้อมูลวันที่โดยประมาณ (ภายใน 3,584 วัน) เพื่อแปลงสัญญาณวันที่จาก GPS ได้อย่างถูกต้อง เพื่อแก้ไขปัญหานี้ในอนาคต ข้อความนำทางพลเรือนด้วย GPS (CNAV) รุ่นใหม่จะใช้ฟิลด์ 13 บิต ซึ่งจะซ้ำกันทุกๆ 8,192 สัปดาห์ (157 ปี) ดังนั้นจึงใช้งานได้จนถึงปี 2137 (157 ปีหลังจากสัปดาห์ที่ศูนย์ของ GPS)
การสื่อสาร
สัญญาณนำทางที่ส่งโดยดาวเทียม GPS เข้ารหัสข้อมูลหลากหลาย รวมถึงตำแหน่งของดาวเทียม สถานะของนาฬิกาภายใน และความสมบูรณ์ของเครือข่าย สัญญาณเหล่านี้ถูกส่งบนความถี่พาหะสองความถี่ที่แยกจากกัน ซึ่งเป็นความถี่เดียวกันสำหรับดาวเทียมทั้งหมดในเครือข่าย มีการใช้การเข้ารหัสสองแบบที่แตกต่างกัน ได้แก่ การเข้ารหัสสาธารณะที่ช่วยให้การนำทางมีความละเอียดต่ำ และการเข้ารหัสแบบเข้ารหัสที่ใช้โดยกองทัพสหรัฐฯ[ 179 ]
รูปแบบข้อความ
รูปแบบข้อความ GPS ซับเฟรม คำอธิบาย 1 ความสัมพันธ์ระหว่าง นาฬิกาดาวเทียมกับเวลาจาก GPS 2–3 ปฏิทินดาราศาสตร์(วงโคจรดาวเทียมที่แม่นยำ) 4–5 ส่วนประกอบของปฏิทิน(สรุปข้อมูลจากเครือข่ายดาวเทียมการแก้ไขข้อผิดพลาด)
ดาวเทียม GPS แต่ละดวงจะออกอากาศข้อความนำทาง อย่างต่อเนื่อง บนความถี่ L1 (C/A และ P/Y) และ L2 (P/Y) ด้วยอัตรา 50 บิตต่อวินาที (ดูอัตราบิต ) ข้อความที่สมบูรณ์แต่ละข้อความใช้เวลา 750 วินาที ( 12)+1/2นาที ) เพื่อให้เสร็จสมบูรณ์ โครงสร้างข้อความมีรูปแบบพื้นฐานเป็นเฟรมยาว 1500 บิต ประกอบด้วยซับเฟรม 5 เฟรม โดยแต่ละซับเฟรมยาว 300 บิต (6 วินาที) ซับเฟรมที่ 4 และ 5 จะถูกสับเปลี่ยน 25ครั้ง ดังนั้นข้อความข้อมูลที่สมบูรณ์จึงต้องส่งเฟรมเต็ม 25 เฟรม แต่ละซับเฟรมประกอบด้วยคำ 10 คำ แต่ละคำยาว 30 บิต ดังนั้น ด้วย 300 บิตในซับเฟรม คูณ 5 ซับเฟรมในเฟรม คูณ 25 เฟรมในข้อความ แต่ละข้อความจึงยาว 37,500 บิต ที่อัตราการส่ง 50 บิต/วินาที จะใช้เวลา 750 วินาทีในการส่งข้อความปฏิทิน (GPS) ทั้งหมด แต่ละเฟรม 30 วินาทีจะเริ่มต้นตรงนาทีหรือครึ่งนาทีตามที่ระบุโดยนาฬิกาอะตอมบนดาวเทียมแต่ละดวง [ 180 ]
ซับเฟรมแรกของแต่ละเฟรมจะเข้ารหัสหมายเลขสัปดาห์และเวลาภายในสัปดาห์[ 181 ]รวมถึงข้อมูลเกี่ยวกับสถานะของดาวเทียม ซับเฟรมที่สองและสามประกอบด้วยข้อมูลวงโคจรที่แม่นยำสำหรับดาวเทียม ซับเฟรมที่สี่และห้าประกอบด้วยปฏิทิน ซึ่งประกอบด้วยข้อมูลวงโคจรและสถานะ โดยคร่าว ๆ สำหรับดาวเทียมมากถึง 32 ดวงในกลุ่มดาวเทียม รวมถึงข้อมูลที่เกี่ยวข้องกับการแก้ไขข้อผิดพลาด ดังนั้น เพื่อให้ได้ตำแหน่งดาวเทียมที่แม่นยำจากข้อความที่ส่งมานี้ ผู้รับจะต้องถอดรหัสข้อความจากดาวเทียมแต่ละดวงที่รวมอยู่ในโซลูชันเป็นเวลา 18 ถึง 30 วินาที ในการรวบรวมปฏิทินที่ส่งมาทั้งหมด ผู้รับจะต้องถอดรหัสข้อความเป็นเวลา 732 ถึง 750 วินาที หรือ12+1/2นาที [ 182 ]
ดาวเทียมทั้งหมดออกอากาศที่ความถี่เดียวกัน โดยเข้ารหัสสัญญาณโดยใช้การเข้าถึงแบบแบ่งรหัส เฉพาะ (CDMA) เพื่อให้เครื่องรับสามารถแยกแยะดาวเทียมแต่ละดวงออกจากกันได้ ระบบใช้การเข้ารหัส CDMA สองประเภทที่แตกต่างกัน ได้แก่ รหัสหยาบ/การได้มา (C/A) ซึ่งบุคคลทั่วไปสามารถเข้าถึงได้ และรหัสที่แม่นยำ (P(Y)) ซึ่งถูกเข้ารหัสไว้เพื่อให้เฉพาะกองทัพสหรัฐฯ และประเทศสมาชิก NATO อื่นๆ ที่ได้รับสิทธิ์ในการเข้าถึงรหัสการเข้ารหัสเท่านั้นที่สามารถเข้าถึงได้[ 183 ]
ตารางตำแหน่งดาวเทียมจะได้รับการอัปเดตทุก 2 ชั่วโมง และมีความเสถียรเพียงพอเป็นเวลา 4 ชั่วโมง โดยมีข้อกำหนดสำหรับการอัปเดตทุก 6 ชั่วโมงหรือนานกว่านั้นในสภาวะที่ไม่ปกติ ปฏิทินดาราศาสตร์จะได้รับการอัปเดตโดยทั่วไปทุก 24 ชั่วโมง นอกจากนี้ ข้อมูลสำหรับอีกไม่กี่สัปดาห์ถัดไปจะถูกอัปโหลดในกรณีที่มีการอัปเดตการส่งสัญญาณที่ทำให้การอัปโหลดข้อมูลล่าช้า[ 184 ] [ 185 ]
ความถี่ของดาวเทียม
ภาพรวมความถี่ GPS [ 186 ] : 607 วงดนตรี ความถี่ คำอธิบาย แอล1 1575.42 เมกะเฮิร์ตซ์ รหัสการได้มาซึ่งข้อมูลแบบหยาบ (C/A) และรหัสความแม่นยำที่เข้ารหัส (P(Y)) รวมถึงรหัสพลเรือน L1 ( L1C ) และรหัสทางทหาร (M) บนดาวเทียม Block III และรุ่นใหม่กว่า แอล2 1227.60 เมกะเฮิร์ตซ์ รหัส P(Y) รวมถึงรหัสL2Cและรหัสทางทหารบนดาวเทียม Block IIR-M และดาวเทียมรุ่นใหม่กว่า แอล3 1381.05 เมกะเฮิร์ตซ์ ใช้สำหรับการตรวจจับการระเบิดนิวเคลียร์ (NUDET) แอล4 1379.913 เมกะเฮิร์ตซ์ กำลังศึกษาเพื่อแก้ไขความคลาดเคลื่อนของชั้นบรรยากาศไอโอโนสเฟียร์เพิ่มเติม แอล5 1176.45 เมกะเฮิร์ตซ์ ใช้เป็นสัญญาณเพื่อความปลอดภัยในชีวิต (SoL) สำหรับพลเรือนบนดาวเทียม Block IIF และดาวเทียมรุ่นใหม่กว่า
ดาวเทียมทั้งหมดส่งสัญญาณที่ความถี่เดียวกันสองความถี่ คือ 1.57542 GHz (สัญญาณ L1) และ 1.2276 GHz (สัญญาณ L2) เครือข่ายดาวเทียมใช้เทคนิคสเปรดสเปกตรัม CDMA [ 186 ] : 607 โดยที่ข้อมูลข้อความอัตราบิตต่ำจะถูกเข้ารหัสด้วยลำดับสุ่มเทียม (PRN) อัตราสูงที่แตกต่างกันสำหรับดาวเทียมแต่ละดวง ผู้รับต้องทราบรหัส PRN สำหรับดาวเทียมแต่ละดวงเพื่อสร้างข้อมูลข้อความจริงขึ้นมาใหม่ รหัส C/A สำหรับการใช้งานพลเรือนจะส่งข้อมูลที่ 1.023 ล้านชิปต่อวินาที ในขณะที่รหัส P สำหรับการใช้งานทางทหารของสหรัฐฯ จะส่งข้อมูลที่ 10.23 ล้านชิปต่อวินาที ค่าอ้างอิงภายในจริงของดาวเทียมคือ 10.22999999543 MHz เพื่อชดเชยผลกระทบเชิงสัมพัทธภาพ[ 187 ] [ 188 ]ที่ทำให้ผู้สังเกตการณ์บนโลกรับรู้การอ้างอิงเวลาที่แตกต่างกันเมื่อเทียบกับเครื่องส่งสัญญาณในวงโคจร คลื่นพาหะ L1 ถูกมอดูเลตด้วยรหัส C/A และ P ในขณะที่คลื่นพาหะ L2 ถูกมอดูเลตด้วยรหัส P เท่านั้น[ 105 ]รหัส P สามารถเข้ารหัสเป็นรหัส P(Y) ที่เรียกว่า ซึ่งมีให้เฉพาะอุปกรณ์ทางทหารที่มีกุญแจถอดรหัสที่เหมาะสมเท่านั้น ทั้งรหัส C/A และ P(Y) ให้ข้อมูลเวลาที่แม่นยำแก่ผู้ใช้
สัญญาณ L3 ที่ความถี่ 1.38105 GHz ใช้ในการส่งข้อมูลจากดาวเทียมไปยังสถานีภาคพื้นดิน ข้อมูลนี้ถูกใช้โดยระบบตรวจจับการระเบิดนิวเคลียร์ (NUDET) ของสหรัฐอเมริกา (USNDS) เพื่อตรวจจับ ระบุตำแหน่ง และรายงานการระเบิดนิวเคลียร์ (NUDET) ในชั้นบรรยากาศของโลกและในอวกาศใกล้โลก[ 189 ]การใช้งานอย่างหนึ่งคือการบังคับใช้สนธิสัญญาห้ามทดสอบนิวเคลียร์
กำลังศึกษาแถบ L4 ที่ 1.379913 GHz เพื่อการแก้ไขไอโอโนสเฟียร์เพิ่มเติม[ 186 ] : 607
แถบความถี่ L5 ที่ 1.17645 GHz ถูกเพิ่มเข้ามาในกระบวนการปรับปรุง GPS ให้ทันสมัย ความถี่นี้อยู่ในช่วงที่ได้รับการคุ้มครองในระดับสากลสำหรับการนำทางการบิน ซึ่งรับประกันว่าจะมีการรบกวนน้อยหรือไม่มีเลยในทุกกรณี ดาวเทียม Block IIF ดวงแรกที่ให้สัญญาณนี้ถูกปล่อยขึ้นสู่อวกาศในเดือนพฤษภาคม 2010 [ 190 ]เมื่อวันที่ 5 กุมภาพันธ์ 2016 ดาวเทียม Block IIF ดวงที่ 12 และดวงสุดท้ายถูกปล่อยขึ้นสู่อวกาศ[ 191 ] L5 ประกอบด้วยส่วนประกอบคลื่นพาหะสองส่วนที่อยู่ในเฟสควอดราเจอร์ซึ่งกันและกัน ส่วนประกอบคลื่นพาหะแต่ละส่วนถูกมอดูเลตด้วยคีย์เปลี่ยนเฟสสองเฟส (BPSK) โดยใช้ชุดบิตแยกต่างหาก “L5 ซึ่งเป็นสัญญาณ GPS พลเรือนตัวที่สาม จะรองรับแอปพลิเคชันเพื่อความปลอดภัยในชีวิตสำหรับการบิน และให้ความพร้อมใช้งานและความแม่นยำที่ดียิ่งขึ้นในที่สุด” [ 192 ]
ในปี 2011 FCC อนุมัติการยกเว้นแบบมีเงื่อนไขให้แก่ LightSquared เพื่อดำเนินการบริการบรอดแบนด์ภาคพื้นดินใกล้กับย่านความถี่ L1 แม้ว่า LightSquared จะยื่นขอใบอนุญาตเพื่อดำเนินการในย่านความถี่ 1525 ถึง 1559 ตั้งแต่ปี 2003 และเปิดให้สาธารณชนแสดงความคิดเห็นแล้วก็ตาม FCC ขอให้ LightSquared จัดตั้งกลุ่มศึกษาขึ้นร่วมกับชุมชน GPS เพื่อทดสอบเครื่องรับสัญญาณ GPS และระบุปัญหาที่อาจเกิดขึ้นเนื่องจากกำลังส่งสัญญาณที่มากขึ้นจากเครือข่ายภาคพื้นดินของ LightSquared ชุมชน GPS ไม่ได้คัดค้านการยื่นขอของ LightSquared (เดิมคือ MSV และ SkyTerra) จนกระทั่งเดือนพฤศจิกายน 2010 เมื่อ LightSquared ยื่นขอแก้ไขการอนุญาตส่วนประกอบภาคพื้นดินเสริม (ATC) ของตน เอกสารฉบับนี้ (SAT-MOD-20101118-00239) เป็นการขออนุญาตใช้กำลังส่งที่มากกว่าเดิมหลายเท่าในย่านความถี่เดียวกันสำหรับสถานีฐานภาคพื้นดิน โดยพื้นฐานแล้วเป็นการนำสิ่งที่ควรจะเป็น "ย่านที่เงียบสงบ" สำหรับสัญญาณจากอวกาศมาใช้ใหม่ให้เทียบเท่ากับเครือข่ายโทรศัพท์มือถือ การทดสอบในช่วงครึ่งแรกของปี 2011 แสดงให้เห็นว่าผลกระทบจากสเปกตรัม 10 MHz ตอนล่างนั้นน้อยมากสำหรับอุปกรณ์ GPS (น้อยกว่า 1% ของอุปกรณ์ GPS ทั้งหมดได้รับผลกระทบ) สเปกตรัม 10 MHz ตอนบนที่ LightSquared ตั้งใจจะใช้อาจมีผลกระทบต่ออุปกรณ์ GPS บ้าง มีความกังวลว่าสิ่งนี้อาจทำให้สัญญาณ GPS เสื่อมคุณภาพอย่างร้ายแรงสำหรับการใช้งานของผู้บริโภคจำนวนมาก[ 193 ] [ 194 ] นิตยสาร Aviation Weekรายงานว่าการทดสอบล่าสุด (มิถุนายน 2011) ยืนยันว่าระบบของ LightSquared "รบกวนสัญญาณ" GPS อย่างมีนัยสำคัญ[ 195 ]
การดีมอดูเลชั่นและการถอดรหัส
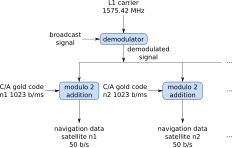
เนื่องจากสัญญาณดาวเทียมทั้งหมดถูกมอดูเลตบนความถี่พาหะ L1 เดียวกัน สัญญาณจึงต้องถูกแยกออกจากกันหลังจากการดีมอดูเลต ซึ่งทำได้โดยการกำหนดลำดับ ไบนารีที่ไม่ซ้ำกันให้กับดาวเทียมแต่ละดวง เรียกว่ารหัสโกลด์สัญญาณจะถูกถอดรหัสหลังจากการดีมอดูเลตโดยใช้การบวกของรหัสโกลด์ที่สอดคล้องกับดาวเทียมที่ตัวรับสัญญาณตรวจสอบ[ 196 ] [ 197 ]
หากข้อมูลปฏิทินดาวเทียมถูกบันทึกไว้ก่อนหน้านี้แล้ว เครื่องรับจะเลือกดาวเทียมที่จะรับฟังโดยใช้หมายเลข PRN ซึ่งเป็นหมายเลขเฉพาะในช่วง 1 ถึง 32 หากไม่มีข้อมูลปฏิทินดาวเทียมอยู่ในหน่วยความจำ เครื่องรับจะเข้าสู่โหมดค้นหาจนกว่าจะสามารถจับสัญญาณดาวเทียมได้ การที่จะจับสัญญาณได้นั้น จำเป็นต้องมีเส้นทางการมองเห็นที่ไม่มีสิ่งกีดขวางจากเครื่องรับไปยังดาวเทียม จากนั้นเครื่องรับจะสามารถดึงข้อมูลปฏิทินดาวเทียมและกำหนดดาวเทียมที่ควรรับฟังได้ เมื่อตรวจจับสัญญาณของดาวเทียมแต่ละดวงได้ เครื่องรับจะระบุดาวเทียมนั้นด้วยรูปแบบรหัส C/A ที่แตกต่างกัน อาจมีความล่าช้าได้ถึง 30 วินาทีก่อนที่จะได้ค่าประมาณตำแหน่งครั้งแรก เนื่องจากจำเป็นต้องอ่านข้อมูลวงโคจรของดาวเทียม
การประมวลผลข้อความนำทางทำให้สามารถระบุเวลาที่ส่งและตำแหน่งของดาวเทียมในขณะนั้นได้ สำหรับข้อมูลเพิ่มเติม โปรดดูที่การถอดรหัสและการแยกสัญญาณขั้นสูง
สมการการนำทาง
คำชี้แจงปัญหา
ตัวรับสัญญาณใช้ข้อความที่ได้รับจากดาวเทียมเพื่อกำหนดตำแหน่งของดาวเทียมและเวลาที่ส่งมา ส่วนประกอบ x, yและzของตำแหน่งดาวเทียมและเวลาที่ส่งมา ( s ) ถูกกำหนดเป็น [ x i , y i , z i , s i ] โดยที่ตัวห้อยiหมายถึงดาวเทียมและมีค่าเป็น 1, 2, ..., nโดยที่n ≥ 4 เมื่อเวลาที่รับข้อความที่ระบุโดยนาฬิกาของตัวรับสัญญาณบนยานคือเวลาที่ได้รับจริงคือโดยที่bคือค่าความคลาดเคลื่อนของนาฬิกาตัวรับสัญญาณจากนาฬิกา GPS ที่แม่นยำกว่ามากซึ่งใช้โดยดาวเทียม ค่าความคลาดเคลื่อนของนาฬิกาตัวรับสัญญาณจะเท่ากันสำหรับสัญญาณดาวเทียมที่ได้รับทั้งหมด (โดยสมมติว่านาฬิกาของดาวเทียมทั้งหมดซิงโครไนซ์กันอย่างสมบูรณ์) เวลาในการเดินทางของข้อความคือโดยที่s iคือเวลาของดาวเทียม สมมติว่าข้อความเดินทางด้วยความเร็วแสง c ระยะทางที่เดินทางคือ




สำหรับดาวเทียม n ดวง สมการที่ต้องปฏิบัติตามมีดังนี้:

โดยที่diคือระยะทางเชิงเรขาคณิตหรือช่วงระหว่างตัวรับและดาวเทียมi (ค่าที่ไม่มีตัวห้อยคือ ส่วนประกอบ x, yและz ของ ตำแหน่งตัวรับ):

เมื่อกำหนดนิยามของ ระยะ ทางเทียม (pseudoranges)เราจะเห็นว่ามันเป็นค่าที่บิดเบือนจากระยะทางจริง (true range)


เนื่องจากสมการมีตัวแปรที่ไม่ทราบค่าสี่ตัว [ x, y, z, b ]—ส่วนประกอบสามส่วนของตำแหน่งตัวรับ GPS และค่าเบี่ยงเบนของนาฬิกา—จึงจำเป็นต้องใช้สัญญาณจากดาวเทียมอย่างน้อยสี่ดวงเพื่อพยายามแก้สมการเหล่านี้ สามารถแก้ได้โดยใช้วิธีพีชคณิตหรือวิธีเชิงตัวเลข การมีอยู่และความเป็นเอกลักษณ์ของคำตอบ GPS ได้รับการกล่าวถึงโดย Abell และ Chaffee [ 88 ]เมื่อnมากกว่าสี่ ระบบนี้จะมีตัวแปรเกินจำนวนที่กำหนดและต้องใช้ วิธีการปรับให้ เหมาะสม
ปริมาณข้อผิดพลาดในผลลัพธ์จะแตกต่างกันไปตามตำแหน่งของดาวเทียมที่รับสัญญาณบนท้องฟ้า เนื่องจากการกำหนดค่าบางอย่าง (เมื่อดาวเทียมที่รับสัญญาณอยู่ใกล้กันบนท้องฟ้า) จะทำให้เกิดข้อผิดพลาดมากขึ้น โดยปกติแล้วตัวรับสัญญาณจะคำนวณค่าประมาณข้อผิดพลาดของตำแหน่งที่คำนวณได้แบบต่อเนื่อง โดยการคูณความละเอียดพื้นฐานของตัวรับสัญญาณด้วยปริมาณที่เรียกว่า ปัจจัย การเจือจางทางเรขาคณิตของตำแหน่ง (GDOP) ซึ่งคำนวณจากทิศทางบนท้องฟ้าสัมพัทธ์ของดาวเทียมที่ใช้[ 200 ]ตำแหน่งของตัวรับสัญญาณจะแสดงในระบบพิกัดเฉพาะ เช่น ละติจูดและลองจิจูดโดยใช้ข้อมูลทางธรณีวิทยาWGS 84 หรือระบบเฉพาะประเทศ[ 201 ]
การตีความทางเรขาคณิต
สมการ GPS สามารถแก้ได้ด้วยวิธีการเชิงตัวเลขและเชิงวิเคราะห์ การตีความทางเรขาคณิตสามารถช่วยเพิ่มความเข้าใจในวิธีการแก้ปัญหาเหล่านี้ได้
ทรงกลม

ช่วงที่วัดได้ ซึ่งเรียกว่าช่วงเทียม (pseudoranges) จะมีข้อผิดพลาดของนาฬิกา ในการจำลองแบบง่ายๆ ที่ช่วงต่างๆ ถูกซิงโครไนซ์ ช่วงจริงเหล่านี้แสดงถึงรัศมีของทรงกลม โดยแต่ละทรงกลมมีจุดศูนย์กลางอยู่ที่ดาวเทียมส่งสัญญาณดวงใดดวงหนึ่ง ตำแหน่งของตัวรับสัญญาณจะอยู่ที่จุดตัดของพื้นผิวของทรงกลมเหล่านี้ ดูการหาตำแหน่งโดยใช้สามเหลี่ยม (โดยทั่วไปเรียกว่าการหาตำแหน่งโดยใช้หลายจุดโดยใช้ช่วงจริง) จำเป็นต้องมีสัญญาณจากดาวเทียมอย่างน้อยสามดวง และทรงกลมทั้งสามของดาวเทียมเหล่านั้นมักจะตัดกันที่สองจุด[ 202 ]จุดหนึ่งคือตำแหน่งของตัวรับสัญญาณ และอีกจุดหนึ่งจะเคลื่อนที่อย่างรวดเร็วในการวัดครั้งต่อๆ ไป และโดยปกติจะไม่อยู่บนพื้นผิวโลก
ในทางปฏิบัติ นอกจากความคลาดเคลื่อนของนาฬิกาแล้ว ยังมีแหล่งที่มาของความคลาดเคลื่อนอีกมากมาย เช่น ข้อผิดพลาดแบบสุ่ม รวมถึงความเป็นไปได้ที่จะสูญเสียความแม่นยำจากการลบตัวเลขที่อยู่ใกล้กัน หากจุดศูนย์กลางของทรงกลมอยู่ใกล้กันมาก นั่นหมายความว่า ตำแหน่งที่คำนวณจากดาวเทียมเพียงสามดวงนั้นไม่น่าจะแม่นยำเพียงพอ ข้อมูลจากดาวเทียมจำนวนมากขึ้นจะช่วยได้ เนื่องจากแนวโน้มที่ข้อผิดพลาดแบบสุ่มจะหักล้างกันเอง และยังช่วยให้มีช่วงห่างระหว่างจุดศูนย์กลางของทรงกลมมากขึ้น แต่ในขณะเดียวกัน ทรงกลมจำนวนมากขึ้นโดยทั่วไปจะไม่ตัดกันที่จุดเดียว ดังนั้นจึงมีการคำนวณจุดตัดที่ใกล้เคียงกัน โดยทั่วไปจะใช้วิธีการกำลังสองน้อยที่สุด ยิ่งมีสัญญาณมากเท่าไร การประมาณค่าก็จะยิ่งดีขึ้นเท่านั้น
ไฮเปอร์โบโลอิด

หากนำค่า pseudorange ระหว่างตัวรับและดาวเทียมiและค่า pseudorange ระหว่างตัวรับและดาวเทียมjมาลบกันp i − p jค่าความคลาดเคลื่อนของนาฬิกาตัวรับร่วม ( b ) จะหักล้างกัน ทำให้ได้ผลต่างของระยะทางd i − d jตำแหน่งของจุดที่มีความแตกต่างของระยะทางคงที่ไปยังสองจุด (ในที่นี้คือดาวเทียมสองดวง) คือไฮเปอร์โบลาบนระนาบและไฮเปอร์โบโลอิดของการหมุน (โดยเฉพาะอย่างยิ่งไฮเปอร์โบโลอิดสองแผ่น ) ในพื้นที่ 3 มิติ (ดูMultilateration ) ดังนั้น จากการวัด pseudorange สี่ครั้ง ตัวรับสามารถวางไว้ที่จุดตัดของพื้นผิวของไฮเปอร์โบโลอิดสามอัน โดยแต่ละอันมีจุดโฟกัสอยู่ที่ดาวเทียมคู่หนึ่ง เมื่อมีดาวเทียมเพิ่มเติม จุดตัดหลายจุดจะไม่จำเป็นต้องมีเอกลักษณ์เฉพาะ และจะค้นหาวิธีแก้ปัญหาที่เหมาะสมที่สุดแทน[ 88 ] [ 89 ] [ 203 ] [ 204 ] [ 205 ] [ 206 ]
ทรงกลมจารึก

ตำแหน่งตัวรับสามารถตีความได้ว่าเป็นจุดศูนย์กลางของทรงกลมที่จารึกไว้ (insphere) ที่มีรัศมีbcซึ่งกำหนดโดยค่าเบี่ยงเบนของนาฬิกาตัวรับb (ปรับขนาดตามความเร็วแสงc ) ตำแหน่งของ insphere จะอยู่ติดกับทรงกลมอื่นๆทรงกลมที่ล้อมรอบจะอยู่ตรงกลางที่ดาวเทียม GPS ซึ่งมีรัศมีเท่ากับค่า pseudorange ที่วัดได้p iการกำหนดค่านี้แตกต่างจากที่อธิบายไว้ข้างต้น ซึ่งรัศมีของทรงกลมคือค่า unbiased หรือ geometric ranges d i [ 205 ] : 36–37 [ 207 ]
ไฮเปอร์โคน
นาฬิกาในตัวรับสัญญาณมักจะไม่ได้คุณภาพเดียวกับนาฬิกาในดาวเทียมและจะไม่ซิงโครไนซ์กับนาฬิกาในดาวเทียมอย่างแม่นยำ ส่งผลให้ระยะทางเทียมที่ได้มีความแตกต่างมากเมื่อเทียบกับระยะทางจริงไปยังดาวเทียม ดังนั้นในทางปฏิบัติ ความแตกต่างของเวลาระหว่างนาฬิกาของตัวรับสัญญาณกับเวลาของดาวเทียมจึงถูกกำหนดให้เป็นค่าเบี่ยงเบนของนาฬิกาที่ไม่ทราบค่าbจากนั้นสมการจะถูกแก้พร้อมกันเพื่อหาตำแหน่งของตัวรับสัญญาณและค่าเบี่ยงเบนของนาฬิกา พื้นที่คำตอบ [ x, y, z, b ] สามารถมองได้ว่าเป็น ปริภูมิเวลาสี่มิติและจำเป็นต้องใช้สัญญาณจากดาวเทียมอย่างน้อยสี่ดวง ในกรณีนั้น สมการแต่ละสมการจะอธิบายไฮเปอร์โคน (หรือกรวยทรงกลม) [ 208 ]โดยมีจุดยอดอยู่ที่ดาวเทียม และฐานเป็นทรงกลมรอบดาวเทียม ตัวรับสัญญาณจะอยู่ที่จุดตัดของไฮเปอร์โคนดังกล่าวสี่อันขึ้นไป
วิธีการแก้ปัญหา
กำลังสองน้อยที่สุด
เมื่อมีดาวเทียมมากกว่าสี่ดวง การคำนวณสามารถใช้ดาวเทียมที่ดีที่สุดสี่ดวง หรือมากกว่าสี่ดวงพร้อมกัน (จนถึงดาวเทียมที่มองเห็นได้ทั้งหมด) ขึ้นอยู่กับจำนวนช่องรับสัญญาณ ความสามารถในการประมวลผล และค่าความคลาดเคลื่อนเชิงเรขาคณิต (GDOP)
การใช้มากกว่าสี่เกี่ยวข้องกับระบบสมการที่มีตัวแปรเกินจำนวนซึ่งไม่มีคำตอบเดียว ระบบดังกล่าวสามารถแก้ไขได้ด้วย วิธี กำลังสองน้อยที่สุดหรือกำลังสองน้อยที่สุดแบบถ่วงน้ำหนัก[ 198 ]

วนซ้ำ
ทั้งสมการสำหรับดาวเทียมสี่ดวง หรือสมการกำลังสองน้อยที่สุดสำหรับดาวเทียมมากกว่าสี่ดวง ล้วนเป็นสมการไม่เชิงเส้นและจำเป็นต้องใช้วิธีการแก้ปัญหาแบบพิเศษ วิธีการที่นิยมใช้คือการวนซ้ำบนรูปแบบเชิงเส้นของสมการ เช่นอัลกอริทึมเกาส์-นิวตัน
ระบบ GPS ได้รับการพัฒนาขึ้นครั้งแรกโดยสมมติว่าใช้ระเบียบวิธีหาค่าต่ำสุดกำลังสองเชิงตัวเลข ซึ่งก็คือ ก่อนที่จะมีการค้นพบวิธีแก้ปัญหาในรูปแบบปิด
รูปแบบปิด
S. Bancroft ได้พัฒนาวิธีแก้ปัญหาแบบปิดสำหรับชุดสมการข้างต้น[ 199 ] [ 209 ]คุณสมบัติของมันเป็นที่รู้จักกันดี[ 88 ] [ 89 ] [ 210 ] โดยเฉพาะอย่างยิ่ง ผู้สนับสนุนอ้างว่ามันเหนือกว่าในสถานการณ์ GDOPต่ำเมื่อเทียบกับวิธีการกำลังสองน้อยที่สุดแบบวนซ้ำ[ 209 ]
วิธีของ Bancroft เป็นวิธีพีชคณิต ไม่ใช่วิธีเชิงตัวเลข และสามารถใช้ได้กับดาวเทียมสี่ดวงขึ้นไป เมื่อใช้ดาวเทียมสี่ดวง ขั้นตอนสำคัญคือการผกผันเมทริกซ์ 4x4 และการแก้สมการกำลังสองตัวแปรเดียว วิธีของ Bancroft ให้คำตอบหนึ่งหรือสองคำตอบสำหรับปริมาณที่ไม่ทราบค่า เมื่อมีสองคำตอบ (โดยปกติจะเป็นเช่นนั้น) จะมีเพียงคำตอบเดียวเท่านั้นที่เป็นคำตอบที่สมเหตุสมผลใกล้โลก[ 199 ]
เมื่อเครื่องรับใช้ดาวเทียมมากกว่าสี่ดวงในการหาคำตอบ Bancroft จะใช้อินเวอร์สทั่วไป (เช่น อินเวอร์สเทียม) เพื่อหาคำตอบ มีการกล่าวอ้างว่าวิธีการวนซ้ำ เช่น วิธีการของอัลกอริทึม Gauss–Newton สำหรับการแก้ ปัญหาการ หาค่าต่ำสุดกำลังสองแบบไม่เชิงเส้นที่ มีตัวแปร เกิน มักจะให้คำตอบที่แม่นยำกว่า[ 211 ]
Leick et al. (2015) ระบุว่า "วิธีแก้ปัญหาของ Bancroft (1985) เป็นวิธีแก้ปัญหาแบบปิดรูปแบบแรกๆ หรืออาจจะเป็นวิธีแรกเลยด้วยซ้ำ" [ 212 ] มีการเผยแพร่วิธีแก้ปัญหาแบบปิดรูปแบบอื่นๆ ในภายหลัง[ 213 ] [ 214 ]แม้ว่าการนำไปใช้ในทางปฏิบัติจะยังไม่ชัดเจนก็ตาม
แหล่งที่มาและการวิเคราะห์ข้อผิดพลาด
การวิเคราะห์ข้อผิดพลาดของ GPS จะตรวจสอบแหล่งที่มาของข้อผิดพลาดในผลลัพธ์ของ GPS และขนาดของข้อผิดพลาดที่คาดการณ์ไว้ GPS จะแก้ไขข้อผิดพลาดของนาฬิกาตัวรับและผลกระทบอื่นๆ แต่ข้อผิดพลาดที่เหลืออยู่บางส่วนยังคงไม่ได้รับการแก้ไข แหล่งที่มาของข้อผิดพลาด ได้แก่ การวัดเวลาการมาถึงของสัญญาณ การคำนวณเชิงตัวเลข ผลกระทบจากบรรยากาศ (ความล่าช้าของไอโอโนสเฟียร์/โทรโพสเฟียร์) ข้อมูลปฏิทินดาราศาสตร์และนาฬิกา สัญญาณมัลติพาธ และการรบกวนจากธรรมชาติและที่มนุษย์สร้างขึ้น ขนาดของข้อผิดพลาดที่เหลืออยู่จากแหล่งที่มาเหล่านี้ขึ้นอยู่กับการลดทอนความแม่นยำทางเรขาคณิต ข้อผิดพลาดที่มนุษย์สร้างขึ้นอาจเกิดจากอุปกรณ์รบกวนและเป็นภัยคุกคามต่อเรือและเครื่องบิน[ 215 ]หรือจากการลดทอนสัญญาณโดยเจตนาผ่านการเลือกความพร้อมใช้งาน ซึ่งจำกัดความแม่นยำไว้ที่ ≈ 6–12 เมตร (20–40 ฟุต) แต่ได้ปิดใช้งานตั้งแต่วันที่ 1 พฤษภาคม 2543 [ 216 ] [ 217 ]
การเพิ่มความแม่นยำและการสำรวจ
การปรับปรุงระบบ GNSSหมายถึงเทคนิคที่ใช้เพื่อปรับปรุงความแม่นยำของข้อมูลตำแหน่งที่ได้จากระบบระบุตำแหน่งทั่วโลก (GPS) หรือระบบดาวเทียมนำทางทั่วโลก อื่นๆ โดยทั่วไป ซึ่งเป็นเครือข่ายดาวเทียมที่ใช้สำหรับการนำทาง วิธีการปรับปรุงความแม่นยำนั้นอาศัยการบูรณาการข้อมูลภายนอกเข้าสู่กระบวนการคำนวณ มีระบบดังกล่าวอยู่มากมาย และโดยทั่วไปจะตั้งชื่อหรืออธิบายตามวิธีการที่เซ็นเซอร์ GPS รับข้อมูล ระบบบางระบบส่งข้อมูลเพิ่มเติมเกี่ยวกับแหล่งที่มาของข้อผิดพลาด (เช่น การคลาดเคลื่อนของนาฬิกา ข้อมูลวงโคจร หรือความล่าช้าของชั้นบรรยากาศไอ โอโนสเฟียร์ ) ระบบอื่นๆ ให้การวัดโดยตรงว่าสัญญาณคลาดเคลื่อนไปมากน้อยเพียงใดในอดีต ในขณะที่กลุ่มที่สามให้ข้อมูลการนำทางหรือข้อมูลยานพาหนะเพิ่มเติมเพื่อบูรณาการเข้าสู่กระบวนการคำนวณ
ประเด็นด้านกฎระเบียบเกี่ยวกับคลื่นความถี่สำหรับเครื่องรับสัญญาณ GPS
ในสหรัฐอเมริกา เครื่องรับ GPS อยู่ภายใต้การกำกับดูแลของคณะกรรมการการสื่อสารแห่งสหรัฐอเมริกา (FCC) ตามที่ระบุไว้ในคู่มือของอุปกรณ์ที่เปิดใช้งาน GPS ที่จำหน่ายในสหรัฐอเมริกา ในฐานะอุปกรณ์ Part 15 อุปกรณ์ดังกล่าว "ต้องยอมรับการรบกวนใด ๆ ที่ได้รับ รวมถึงการรบกวนที่อาจทำให้เกิดการทำงานที่ไม่พึงประสงค์" [ 218 ] โดยเฉพาะอย่างยิ่งในส่วนของอุปกรณ์ GPS นั้น FCC ระบุว่าผู้ผลิตเครื่องรับ GPS "ต้องใช้เครื่องรับที่สามารถแยกแยะการรับสัญญาณที่อยู่นอกช่วงความถี่ที่จัดสรรไว้อย่างเหมาะสม" [ 219 ]ในช่วง 30 ปีที่ผ่านมา เครื่องรับ GPS ได้ทำงานใกล้กับย่านความถี่บริการดาวเทียมเคลื่อนที่ และได้แยกแยะการรับสัญญาณบริการดาวเทียมเคลื่อนที่ เช่น Inmarsat โดยไม่มีปัญหาใด ๆ
คลื่นความถี่ที่จัดสรรสำหรับการใช้งาน GPS L1 โดย FCC คือ 1559 ถึง 1610 MHz ในขณะที่คลื่นความถี่ที่จัดสรรสำหรับการใช้งานดาวเทียมสู่ภาคพื้นดินซึ่งเป็นกรรมสิทธิ์ของ LightSquared คือย่านความถี่บริการดาวเทียมเคลื่อนที่[ 220 ]ตั้งแต่ปี 1996 FCC ได้อนุญาตให้บริษัทLightSquared ในรัฐเวอร์จิเนีย ใช้คลื่นความถี่ที่อยู่ใกล้เคียงกับย่านความถี่ GPS ที่ 1525 ถึง 1559 MHz เมื่อวันที่ 1 มีนาคม 2001 FCC ได้รับคำขอจากMotient Services ซึ่งเป็นบริษัทก่อนหน้าของ LightSquared เพื่อใช้ความถี่ที่จัดสรรไว้สำหรับบริการดาวเทียม-ภาคพื้นดินแบบบูรณาการ[ 221 ]ในปี 2002 สภาอุตสาหกรรม GPS ของสหรัฐอเมริกาได้บรรลุข้อตกลงการปล่อยคลื่นนอกย่านความถี่ (OOBE) กับ LightSquared เพื่อป้องกันการส่งสัญญาณจากสถานีภาคพื้นดินของ LightSquared ไม่ให้ส่งสัญญาณเข้าไปในย่านความถี่ GPS ที่อยู่ใกล้เคียงที่ 1559 ถึง 1610 MHz [ 222 ]ในปี 2547 FCC ได้นำข้อตกลง OOBE มาใช้ในการอนุญาตให้ LightSquared ติดตั้งเครือข่ายภาคพื้นดินที่เป็นส่วนเสริมของระบบดาวเทียม ซึ่งรู้จักกันในชื่อ Ancillary Tower Components (ATCs) โดยระบุว่า "เราจะอนุญาต MSS ATC ภายใต้เงื่อนไขที่รับรองว่าส่วนประกอบภาคพื้นดินที่เพิ่มเข้ามายังคงเป็นส่วนเสริมของบริการ MSS หลัก เราไม่ได้ตั้งใจ และเราจะไม่อนุญาตให้ส่วนประกอบภาคพื้นดินกลายเป็นบริการแบบแยกต่างหาก" [ 223 ]การอนุญาตนี้ได้รับการตรวจสอบและอนุมัติโดยคณะกรรมการที่ปรึกษาด้านวิทยุระหว่างหน่วยงานของสหรัฐอเมริกา ซึ่งประกอบด้วยกระทรวงเกษตรของสหรัฐอเมริกากองทัพอวกาศของสหรัฐอเมริกา กองทัพบกของสหรัฐอเมริกาหน่วยยามฝั่งของสหรัฐอเมริกาสำนักงานบริหารการบินแห่งสหรัฐอเมริกาองค์การบริหารการบินและอวกาศแห่งชาติ (NASA) กระทรวงมหาดไทยของสหรัฐอเมริกาและกระทรวงคมนาคมของสหรัฐอเมริกา[ 224 ]
ในเดือนมกราคม 2011 FCC ได้อนุญาตแบบมีเงื่อนไขให้ลูกค้าขายส่งของ LightSquared เช่นBest Buy , SharpและC Spireซื้อบริการแบบบูรณาการระหว่างดาวเทียมและภาคพื้นดินจาก LightSquared เท่านั้น และขายต่อบริการแบบบูรณาการนั้นบนอุปกรณ์ที่ติดตั้งมาเพื่อใช้สัญญาณภาคพื้นดินโดยใช้ความถี่ที่ LightSquared จัดสรรไว้ที่ 1525 ถึง 1559 MHz เท่านั้น[ 225 ]ในเดือนธันวาคม 2010 ผู้ผลิตเครื่องรับ GPS ได้แสดงความกังวลต่อ FCC ว่าสัญญาณของ LightSquared จะรบกวนอุปกรณ์รับ GPS [ 193 ]แม้ว่าการพิจารณานโยบายของ FCC ที่นำไปสู่คำสั่งในเดือนมกราคม 2011 จะไม่ได้เกี่ยวข้องกับการเปลี่ยนแปลงใดๆ ที่เสนอเกี่ยวกับจำนวนสถานีภาคพื้นดินสูงสุดของ LightSquared หรือกำลังสูงสุดที่สถานีเหล่านี้สามารถทำงานได้ คำสั่งในเดือนมกราคม 2011 ทำให้การอนุญาตขั้นสุดท้ายขึ้นอยู่กับการศึกษาปัญหาการรบกวน GPS ที่ดำเนินการโดยกลุ่มทำงานที่นำโดย LightSquared ร่วมกับการมีส่วนร่วมของอุตสาหกรรม GPS และหน่วยงานของรัฐบาลกลาง เมื่อวันที่ 14 กุมภาพันธ์ 2555 FCC ได้เริ่มดำเนินการเพื่อเพิกถอนคำสั่งยกเว้นเงื่อนไขของ LightSquared โดยอ้างอิงจากข้อสรุปของ NTIA ที่ว่าในขณะนั้นยังไม่มีวิธีปฏิบัติใดที่จะบรรเทาผลกระทบจากการรบกวนสัญญาณ GPS ที่อาจเกิดขึ้นได้
ผู้ผลิตเครื่องรับ GPS ออกแบบเครื่องรับ GPS ให้ใช้สเปกตรัมที่อยู่นอกเหนือย่านความถี่ที่จัดสรรไว้สำหรับ GPS ในบางกรณี เครื่องรับ GPS ได้รับการออกแบบให้ใช้สเปกตรัมได้มากถึง 400 MHz ในทิศทางใดทิศทางหนึ่งของความถี่ L1 ที่ 1575.42 MHz เนื่องจากบริการดาวเทียมเคลื่อนที่ในภูมิภาคเหล่านั้นกำลังออกอากาศจากอวกาศสู่พื้นดิน และมีระดับกำลังส่งที่สอดคล้องกับบริการดาวเทียมเคลื่อนที่[ 226 ]ตามข้อกำหนดภายใต้กฎ Part 15 ของ FCC เครื่องรับ GPS ไม่ได้รับการรับประกันการป้องกันจากสัญญาณนอกสเปกตรัมที่จัดสรรไว้สำหรับ GPS [ 219 ]นี่คือเหตุผลที่ GPS ทำงานอยู่ข้างๆ ย่านความถี่บริการดาวเทียมเคลื่อนที่ และเป็นเหตุผลที่ย่านความถี่บริการดาวเทียมเคลื่อนที่ทำงานอยู่ข้างๆ GPS ความสัมพันธ์แบบพึ่งพาอาศัยกันของการจัดสรรสเปกตรัมทำให้มั่นใจได้ว่าผู้ใช้ทั้งสองย่านความถี่สามารถทำงานร่วมกันได้อย่างอิสระ
FCC ได้ออกกฎในเดือนกุมภาพันธ์ พ.ศ. 2546 ที่อนุญาตให้ผู้รับใบอนุญาตบริการดาวเทียมเคลื่อนที่ (MSS) เช่น LightSquared สามารถสร้างเสาสัญญาณภาคพื้นดินเสริมจำนวนเล็กน้อยในสเปกตรัมที่ได้รับอนุญาตเพื่อ "ส่งเสริมการใช้สเปกตรัมไร้สายภาคพื้นดินอย่างมีประสิทธิภาพมากขึ้น" [ 227 ]ในกฎปี พ.ศ. 2546 นั้น FCC ระบุว่า: "ในเบื้องต้น คาดว่าบริการวิทยุเคลื่อนที่เชิงพาณิชย์ภาคพื้นดิน (CMRS) และ MSS ATC จะมีราคา ความครอบคลุม การยอมรับผลิตภัณฑ์ และการจัดจำหน่ายที่แตกต่างกัน ดังนั้น บริการทั้งสองจึงดูเหมือนจะเป็นสิ่งทดแทนกันได้ไม่สมบูรณ์แบบ และจะดำเนินการในกลุ่มตลาดที่แตกต่างกันเป็นส่วนใหญ่ ... MSS ATC ไม่น่าจะแข่งขันโดยตรงกับ CMRS ภาคพื้นดินสำหรับฐานลูกค้าเดียวกัน..." ในปี 2547 FCC ได้ชี้แจงว่าเสาส่งสัญญาณภาคพื้นดินจะเป็นส่วนประกอบเสริม โดยระบุว่า: "เราจะอนุญาต MSS ATC ภายใต้เงื่อนไขที่รับรองว่าส่วนประกอบภาคพื้นดินที่เพิ่มเข้ามาจะยังคงเป็นส่วนประกอบเสริมของบริการ MSS หลัก เราไม่ได้ตั้งใจ และเราจะไม่อนุญาตให้ส่วนประกอบภาคพื้นดินกลายเป็นบริการแบบแยกต่างหาก" [ 223 ]ในเดือนกรกฎาคม 2553 FCC ระบุว่าคาดหวังว่า LightSquared จะใช้อำนาจของตนเพื่อเสนอบริการดาวเทียม-ภาคพื้นดินแบบบูรณาการเพื่อ "ให้บริการบรอดแบนด์มือถือที่คล้ายกับที่ผู้ให้บริการมือถือภาคพื้นดินให้บริการ และเพิ่มการแข่งขันในภาคบรอดแบนด์มือถือ" [ 228 ]ผู้ผลิตเครื่องรับ GPS ได้โต้แย้งว่าคลื่นความถี่ที่ได้รับอนุญาตของ LightSquared ที่ 1525 ถึง 1559 MHz ไม่เคยถูกมองว่าจะใช้สำหรับบรอดแบนด์ไร้สายความเร็วสูง โดยอ้างอิงจากคำตัดสินของ FCC ATC ในปี 2003 และ 2004 ที่ระบุอย่างชัดเจนว่าส่วนประกอบเสาเสริม (ATC) จะเป็นส่วนประกอบเสริมของส่วนประกอบดาวเทียมหลัก[ 229 ]เพื่อสร้างการสนับสนุนจากสาธารณชนต่อความพยายามที่จะคงการอนุญาตของ FCC ในปี 2004 สำหรับส่วนประกอบภาคพื้นดินเสริมของ LightSquared เทียบกับบริการ LTE บนภาคพื้นดินแบบง่ายๆ ในย่านความถี่บริการดาวเทียมเคลื่อนที่ ผู้ผลิตเครื่องรับ GPS Trimble Navigation Ltd. ได้ก่อตั้ง "กลุ่มพันธมิตรเพื่อปกป้อง GPS ของเรา" [ 230 ]
FCC และ LightSquared ต่างให้คำมั่นสัญญาต่อสาธารณะว่าจะแก้ไขปัญหาการรบกวนของ GPS ก่อนที่จะอนุญาตให้เครือข่ายดำเนินการ[ 231 ] [ 232 ]ตามที่ Chris Dancy จากสมาคมเจ้าของและนักบินเครื่องบินกล่าวไว้ นักบินสายการบินที่มีระบบประเภทที่อาจได้รับผลกระทบ "อาจบินออกนอกเส้นทางและไม่รู้ตัวด้วยซ้ำ" [ 233 ]ปัญหานี้อาจส่งผลกระทบต่อการอัปเกรดระบบควบคุมการจราจรทางอากาศ ของสำนักงานบริหารการบินแห่งสหรัฐอเมริกา คำแนะนำ ของกระทรวงกลาโหมสหรัฐฯและบริการฉุกเฉิน ในท้องถิ่น รวมถึง911ด้วย[ 233 ]
เมื่อวันที่ 14 กุมภาพันธ์ 2555 FCC ได้ดำเนินการห้ามเครือข่ายบรอดแบนด์ระดับชาติที่ LightSquared วางแผนไว้ หลังจากได้รับแจ้งจากสำนักงานโทรคมนาคมและสารสนเทศแห่งชาติ (NTIA) ซึ่งเป็นหน่วยงานของรัฐบาลกลางที่ประสานงานการใช้คลื่นความถี่สำหรับกองทัพและหน่วยงานรัฐบาลกลางอื่นๆ ว่า "ในขณะนี้ไม่มีวิธีปฏิบัติใดๆ ที่จะบรรเทาการรบกวนที่อาจเกิดขึ้นได้" [ 234 ] [ 235 ] LightSquared กำลังท้าทายการดำเนินการของ FCC
ระบบที่คล้ายกัน

หลังจากที่สหรัฐอเมริกาได้นำระบบ GPS มาใช้งาน ประเทศอื่นๆ ก็ได้พัฒนาระบบนำทางด้วยดาวเทียมของตนเองเช่นกัน ระบบเหล่านี้ได้แก่:
- ระบบนำทางด้วยดาวเทียมทั่วโลกของรัสเซีย ( GLONASS ) ได้รับการพัฒนาในเวลาเดียวกับ GPS แต่ประสบปัญหาการครอบคลุมทั่วโลกไม่สมบูรณ์จนกระทั่งช่วงกลางทศวรรษ 2000 [ 236 ]การรับสัญญาณ GLONASS นอกเหนือจาก GPS สามารถรวมเข้าด้วยกันในเครื่องรับ ทำให้มีดาวเทียมเพิ่มเติมที่พร้อมใช้งานเพื่อให้สามารถระบุตำแหน่งได้เร็วขึ้นและมีความแม่นยำมากขึ้นภายใน 2 เมตร (6.6 ฟุต) [ 237 ] [ 238 ]ในเดือนตุลาคม 2011 กลุ่มดาวเทียมโคจรครบ 24 ดวงทำให้สามารถครอบคลุมทั่วโลกได้อย่างสมบูรณ์ การออกแบบดาวเทียม GLONASS ได้รับการปรับปรุงหลายครั้ง โดยเวอร์ชันล่าสุดGLONASS-K2เปิดตัวในปี 2023 [ 239 ]
- ระบบนำทางดาวเทียมเป่ยโต่วของจีนเริ่มให้บริการทั่วโลกในปี 2018 และดำเนินการติดตั้งใช้งานอย่างเต็มรูปแบบในปี 2020 ประกอบด้วยดาวเทียมในวงโคจรที่แตกต่างกัน 3 วง ได้แก่ ดาวเทียม 24 ดวงในวงโคจรวงกลมขนาดกลาง (ครอบคลุมทั่วโลก) ดาวเทียม 3 ดวงในวงโคจรซิงโครนัสทางภูมิศาสตร์แบบเอียง (ครอบคลุมภูมิภาคเอเชียแปซิฟิก) และดาวเทียม 3 ดวงในวงโคจรค้างฟ้า (ครอบคลุมประเทศจีน) [ 240 ]
- ระบบดาวเทียมนำทางกาลิเลโอซึ่งเป็นระบบระดับโลกที่กำลังพัฒนาโดยสหภาพยุโรปและประเทศพันธมิตรอื่นๆ เริ่มดำเนินการในปี 2016 [ 241 ]และได้ติดตั้งใช้งานอย่างเต็มรูปแบบภายในปี 2020 ในเดือนพฤศจิกายน 2018 FCCได้อนุมัติการใช้กาลิเลโอในสหรัฐอเมริกา[ 242 ]ณ เดือนกันยายน 2024 มีดาวเทียมที่ปล่อยขึ้น สู่อวกาศ 25 ดวง ที่ปฏิบัติงานในกลุ่มดาวเทียม[ 243 ] [ 244 ] [ 245 ]คาดว่าดาวเทียมรุ่นต่อไปจะเริ่มใช้งานได้หลังจากปี 2026 เพื่อทดแทนดาวเทียมรุ่นแรก ซึ่งสามารถใช้เป็นระบบสำรองได้
- ระบบดาวเทียม Quasi-Zenith (QZSS) ของญี่ปุ่นเป็นระบบเสริมความแม่นยำของ GPS ที่ใช้ดาวเทียมเพื่อเพิ่มความแม่นยำของ GPS ในภูมิภาคเอเชีย-โอเชียเนีย โดยมีกำหนดการให้การนำทางด้วยดาวเทียมเป็นอิสระจาก GPS ในปี 2023 [ 246 ]
- ระบบนำทางด้วยดาวเทียมภูมิภาคของอินเดีย (ชื่อทางการคือ 'NavIC' ซึ่งย่อมาจาก Navigation with Indian Constellation) เป็นระบบที่อินเดียใช้งาน
ระบบสำรองข้อมูล
ในกรณีที่สภาพอากาศในอวกาศ ไม่เอื้ออำนวย หรือมีการติดตั้งอาวุธต่อต้านดาวเทียมเพื่อโจมตี GPS สหรัฐอเมริกาไม่มีระบบสำรองภาคพื้นดิน ค่าใช้จ่ายที่อาจเกิดขึ้นจากเหตุการณ์ดังกล่าวต่อเศรษฐกิจของสหรัฐฯ คาดว่าจะสูงถึง 1 พันล้านดอลลาร์ต่อวัน ระบบ LORAN-Cถูกปิดใช้งานในอเมริกาเหนือในปี 2010 และในยุโรปในปี 2015 eLoranถูกเสนอให้เป็นระบบสำรองภาคพื้นดินของอเมริกา แต่จนถึงปี 2024 ก็ยังไม่ได้รับการอนุมัติหรือเงินทุน[ 247 ]
จีนยังคงใช้งานเครื่องส่งสัญญาณ LORAN-C ต่อไป[ 248 ]และรัสเซียมีระบบที่คล้ายกันเรียกว่าCHAYKA ("นกนางนวล")
ดูเพิ่มเติม
- รายชื่อดาวเทียม GPS
- บล็อกดาวเทียม GPS
- สัญญาณ GPS
- ซอฟต์แวร์นำทางด้วยดาวเทียม
- GPS/INS
- การปลอมแปลงพิกัด GPS
- ระบบระบุตำแหน่งภายในอาคาร
- ระบบเสริมประสิทธิภาพพื้นที่เฉพาะที่
- ระบบระบุตำแหน่งท้องถิ่น
- สิ่งประดิษฐ์ทางทหาร
- การติดตามโทรศัพท์มือถือ
- ความขัดแย้งในการนำทาง
- ประกาศแจ้งเตือนสำหรับผู้ใช้งาน Navstar
- เอส-GPS
- ดาวเทียมบอลลูนวงโคจรค้างฟ้า
หมายเหตุ
- ^ในความเป็นจริงแล้ว เรือไม่น่าจะอยู่ที่ระดับ 0 เมตรอย่างแม่นยำ เนื่องจากกระแสน้ำและปัจจัยอื่นๆ ที่ทำให้ระดับน้ำทะเลเฉลี่ยและระดับน้ำทะเลจริงแตกต่างกัน ในมหาสมุทรเปิด ระดับน้ำขึ้นและน้ำลงมักจะแตกต่างกันเพียงประมาณ 0.6 เมตร แต่ใกล้ชายฝั่งแล้วอาจแตกต่างกันมากกว่า15 เมตร
- ^ คาบการโคจร และความเร็วจะคำนวณโดยใช้ความสัมพันธ์ 4π²R³ = T²GM และ V²R = GMโดยที่ R คือรัศมีวง โคจร ในหน่วยเมตร ; Tคือคาบการโคจรในหน่วยวินาที; V คือความเร็ววงโคจรในหน่วยเมตร/วินาที; Gคือค่าคงที่ความโน้มถ่วงโดยประมาณ6.673 × 10 −11 Nm 2 /kg 2 ; Mคือมวลของโลก ประมาณ 5.98 × 10 24 kg (1.318 × 10 25 lb)
- ^ประมาณ 8.6 เท่า เมื่อดวงจันทร์อยู่ใกล้โลกที่สุด (นั่นคือ363,104 กม./42,164 กม.)ถึง 9.6 เท่าเมื่อดวงจันทร์อยู่ไกลที่สุด ( นั่นคือ405,696 กม./42,164 กม.)
Further reading
- Bowditch, Nathaniel (2002). "Chapter 11 Satellite Navigation". . United States Government.
- Dunn, Katherine (2026). Little Blue Dot: How GPS Shaped the Modern World. New York: Bloomsbury Publishing. ISBN 9781639734313. OCLC 1533910630.
- [Massachusetts Institute of Technology] (2012). "12.540 Principles of the Global Positioning System, Spring 2012". MIT OpenCourseWare. Massachusetts Institute of Technology.
- Mendizabal, Jaizki; Berenguer, Roc; Melendez, Juan (2009). GPS and Galileo. McGraw Hill. ISBN 978-0-07-159869-9.
- Milner, Greg (2016). Pinpoint: How GPS Is Changing Technology, Culture, and Our Minds. W. W. Norton. ISBN 978-0-393-08912-7.
- Parkinson; Spilker (1996). The Global Positioning System. American Institute of Aeronautics and Astronautics. ISBN 978-1-56347-106-3.
- [United States Coast Guard] (September 1996). "NAVSTAR GPS User Equipment Introduction"(PDF). United States Coast Guard. Archived from the original(PDF) on October 21, 2013. Retrieved August 22, 2008.
External links
- FAA GPS FAQ
- GPS.gov – General public education website created by the U.S. Government
- "Pentagon pulls the plug on one of the military’s most troubled space programs". The GPS Next-Generation Operational Control System (OCX) was canceled on April 17, 2026. Ars Technica, Apr 20, 2026
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ระบบกำหนดตำแหน่งทั่วโลก
ระบบ ระบุตำแหน่งทั่วโลก ( GPS ) เป็น ระบบ นำทางแบบไฮเปอร์โบลิก ที่ใช้ดาวเทียม ซึ่งเป็นกรรมสิทธิ์ของ กองทัพอวกาศสหรัฐฯ
ภาพรวม
โครงการ GPS เริ่มต้นโดย กระทรวงกลาโหมของสหรัฐอเมริกา ในปี 1973 [ 7 ] ยานอวกาศต้นแบบถูกปล่อยขึ้นสู่อวกาศในปี 1978 และดาวเทียมทั้ง 24 ดวงเริ่มใช้งานได้ในปี 1993 [ 7 ] หลังจากที่ เครื่องบิน Korean Air Lines เที่ยวบิน 007...
ประวัติศาสตร์
โครงการ GPS เปิดตัวในสหรัฐอเมริกาในปี 1973 เพื่อเอาชนะข้อจำกัดของระบบนำทางก่อนหน้านี้ [ 16 ] โดยผสมผสานแนวคิดจากระบบก่อนหน้าหลายระบบ รวมถึงการศึกษาการออกแบบทางวิศวกรรมที่เป็นความลับจากช่วงทศวรรษ 1960 กระทรวงกลาโหมสหรัฐฯ
บรรพบุรุษ
เมื่อ สหภาพโซเวียต ปล่อยดาวเทียมเทียมดวงแรก ( สปุตนิก 1 ) ในปี พ.ศ.