อ่าน 14 นาที
ระบบพิกัดคาร์ทีเซียน
ในทาง เรขาคณิต ระบบ พิกัดคาร์ที เซียน (UK: /kɑːrˈtiːzjən / , US : / kɑːrˈtiːʒən / ) ใน ระนาบ คือ ระบบ พิกัด ที่ ระบุ แต่ละ จุด ได้ อย่าง เฉพาะ เจาะจง ด้วย คู่ ของ จำนวน จริง...
ระบบพิกัดคาร์ทีเซียน

ในทางเรขาคณิตระบบพิกัดคาร์ทีเซียน(UK: /kɑːrˈtiːzjən / , US : / kɑːrˈtiːʒən / )ในระนาบคือระบบพิกัดที่ระบุแต่ละจุดได้อย่างเฉพาะเจาะจงด้วยคู่ของจำนวนจริงที่เรียกว่าพิกัดซึ่งเป็น ระยะทาง ที่มีเครื่องหมายไปยังจุดนั้นจากเส้นตรงสองเส้นที่ตั้งฉากกันและวางตัวในแนวเดียวกันเรียกว่าเส้นพิกัด แกนพิกัดหรือเพียงแค่แกน (พหูพจน์ของaxis ) ของระบบ จุดที่แกนทั้งสองตัดกันเรียกว่าจุดกำเนิดและมี พิกัดเป็น (0, 0) ทิศทางของแกนแสดงถึงฐานตั้งฉาก การรวมกันของจุดกำเนิดและฐานตั้งฉากก่อให้เกิดกรอบพิกัดที่เรียกว่ากรอบคาร์ทีเซียน
ในทำนองเดียวกัน ตำแหน่งของจุดใดๆ ในปริภูมิสามมิติสามารถระบุได้ด้วยพิกัดคาร์ทีเซียน สาม พิกัด ซึ่งเป็นระยะทางที่มีเครื่องหมายจากจุดนั้นไปยังระนาบสามระนาบที่ตั้งฉากกัน โดยทั่วไปแล้ว พิกัดคาร์ทีเซียน nพิกัดจะระบุจุดในปริภูมิยูคลิดnมิติสำหรับมิติn ใดๆ พิกัดเหล่านี้เป็นระยะทางที่มีเครื่องหมายจากจุดนั้นไปยังระนาบ ไฮเปอร์ nระนาบ ที่ตั้ง ฉากกันและคงที่
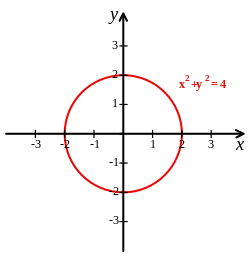
ระบบพิกัดคาร์ทีเซียนตั้งชื่อตามเรเน่ เดส์การ์ตผู้คิดค้นระบบนี้ในศตวรรษที่ 17 ซึ่งปฏิวัติวงการคณิตศาสตร์โดยทำให้สามารถแสดงปัญหาทางเรขาคณิตในรูปของพีชคณิตและแคลคูลัสได้ โดยใช้ระบบพิกัดคาร์ทีเซียน รูปทรงเรขาคณิต (เช่นเส้นโค้ง ) สามารถอธิบายได้ด้วยสมการที่เกี่ยวข้องกับพิกัดของจุดต่างๆ บนรูปทรงนั้น ตัวอย่างเช่นวงกลมรัศมี 2 ที่มีจุดศูนย์กลางอยู่ที่จุดกำเนิดของระนาบ อาจอธิบายได้ว่าเป็นเซตของจุดทั้งหมดที่มีพิกัดxและyที่สอดคล้องกับสมการ x² + y² = 4 พื้นที่ เส้นรอบวงและเส้นสัมผัสที่จุดใดๆสามารถคำนวณได้จากสมการนี้โดยใช้ปริพันธ์และอนุพันธ์ในลักษณะที่สามารถนำไปใช้กับเส้นโค้งใดๆ ก็ได้
พิกัดคาร์ทีเซียนเป็นพื้นฐานของเรขาคณิตวิเคราะห์และให้การตีความทางเรขาคณิตที่กระจ่างแจ้งสำหรับสาขาคณิตศาสตร์อื่นๆ อีกมากมาย เช่นพีชคณิตเชิงเส้นการวิเคราะห์เชิงซ้อน เรขาคณิตเชิง อนุพันธ์ แคลคูลัสหลายตัวแปรทฤษฎีกลุ่มและอื่นๆ ตัวอย่างที่คุ้นเคยคือแนวคิดของกราฟของฟังก์ชันพิกัดคาร์ทีเซียนยังเป็นเครื่องมือที่จำเป็นสำหรับสาขาวิชาประยุกต์ส่วนใหญ่ที่เกี่ยวข้องกับเรขาคณิต รวมถึงดาราศาสตร์ฟิสิกส์วิศวกรรมและอื่นๆ อีกมากมาย พวกมันเป็นระบบพิกัดที่ใช้กันมากที่สุดในกราฟิกคอมพิวเตอร์ การออกแบบทางเรขาคณิต โดยใช้คอมพิวเตอร์ช่วยและการประมวลผลข้อมูลอื่นๆที่ เกี่ยวข้องกับเรขาคณิต
ประวัติศาสตร์
| ส่วนหนึ่งของชุดบทความเกี่ยวกับ |
| เรเน่ เดส์การ์ตส์ |
|---|
 |
คำคุณศัพท์Cartesianหมายถึงนักคณิตศาสตร์และนักปรัชญา ชาวฝรั่งเศส เรเน่ เดส์การ์ตผู้เผยแพร่แนวคิดนี้ในปี ค.ศ. 1637 ขณะที่เขาพำนักอยู่ในเนเธอร์แลนด์ แนวคิดนี้ได้รับการค้นพบโดยอิสระโดยปิแอร์ เดอ แฟร์มาต์ซึ่งทำงานในสามมิติเช่นกัน แม้ว่าแฟร์มาต์จะไม่ได้เผยแพร่การค้นพบนี้ ก็ตาม [ 1 ]นักบวชหญิงชาวฝรั่งเศสนิโคล โอเรสเมใช้โครงสร้างที่คล้ายกับพิกัดคาร์ทีเซียนมานานก่อนยุคของเดส์การ์ตและแฟร์มาต์[ 2 ]
ทั้งเดส์การ์ตและแฟร์มาต์ใช้แกนเดียวในการพิจารณา และมีความยาวแปรผันที่วัดโดยอ้างอิงจากแกนนี้[ 3 ]แนวคิดการใช้แกนคู่ได้รับการนำเสนอในภายหลัง หลังจากที่หนังสือเรขาคณิต ของเดส์การ์ต ได้รับการแปลเป็นภาษาละตินในปี 1649 โดยฟรานส์ ฟาน สคูเทนและลูกศิษย์ของเขา ผู้วิจารณ์เหล่านี้ได้นำเสนอแนวคิดหลายประการในขณะที่พยายามชี้แจงความคิดที่อยู่ในงานของเดส์การ์ต[ 4 ]
การพัฒนาระบบพิกัดคาร์ทีเซียนมีบทบาทสำคัญในการพัฒนาแคลคูลัสโดยไอแซค นิวตันและก็อตฟรีด วิลเฮล์ม ไลบ์นิซ [ 5 ] คำอธิบายระนาบแบบสองพิกัดได้รับการขยายความในภายหลังเป็นแนวคิดของปริภูมิเวกเตอร์[ 6 ]
นับตั้งแต่สมัยของเดส์การ์ต ได้มีการพัฒนาระบบพิกัดอื่นๆ อีกมากมาย เช่นพิกัดเชิงขั้วสำหรับระนาบ และ พิกัด ทรงกลมและทรงกระบอกสำหรับพื้นที่สามมิติ
คำอธิบาย
มิติเดียว
เส้นตรงเชิงเส้นตรงที่มีระบบพิกัดคาร์ทีเซียนที่เลือกไว้ เรียกว่าเส้นจำนวนทุกจุดบนเส้นจำนวนจะมีพิกัดเป็นจำนวนจริง และทุกจำนวนจริงจะแทนจุดใดจุดหนึ่งบนเส้นจำนวนนั้น
ในการเลือกใช้ระบบพิกัดคาร์ทีเซียนสำหรับเส้นตรงนั้น มีอิสระสองระดับซึ่งสามารถระบุได้โดยการเลือกจุดสองจุดที่แตกต่างกันตามแนวเส้นตรง และกำหนดให้จุดเหล่านั้นมีค่าเป็นจำนวนจริง สองจำนวนที่แตกต่างกัน (โดยทั่วไปคือศูนย์และหนึ่ง) จากนั้นสามารถกำหนดตัวเลขให้กับจุดอื่นๆ ได้อย่างเฉพาะเจาะจงโดยการประมาณค่าเชิงเส้น หรืออีกนัยหนึ่ง สามารถกำหนดจุดหนึ่งให้มีค่าเป็นจำนวนจริงเฉพาะ เช่น จุด กำเนิดที่สอดคล้องกับศูนย์ และ สามารถเลือกความยาวตามแนวเส้น ตรงเป็นหน่วยได้ โดยทิศทางจะบ่งบอกถึงความสอดคล้องระหว่างทิศทางตามแนวเส้นตรงและจำนวนบวกหรือลบ[ a ]แต่ละจุดจะสอดคล้องกับระยะทางที่มีเครื่องหมายจากจุดกำเนิด (จำนวนที่มีค่าสัมบูรณ์เท่ากับระยะทางและ เครื่องหมาย +หรือ−ที่เลือกตามทิศทาง)
การแปลงทางเรขาคณิตของเส้นตรงสามารถแสดงได้ด้วยฟังก์ชันของตัวแปรจริงตัวอย่างเช่นการเลื่อนเส้นตรงสอดคล้องกับการบวก และการปรับขนาดเส้นตรงสอดคล้องกับการคูณ ระบบพิกัดคาร์ทีเซียนสองระบบใดๆ บนเส้นตรงสามารถเชื่อมโยงกันได้ด้วยฟังก์ชันเชิงเส้น (ฟังก์ชันในรูปแบบ)ซึ่งแปลงพิกัดของจุดเฉพาะในระบบหนึ่งไปยังพิกัดของจุดนั้นในอีกระบบหนึ่ง การเลือกใช้ระบบพิกัดสำหรับเส้นตรงสองเส้นที่แตกต่างกันจะสร้างแผนที่เชิงเส้นจากเส้นตรงหนึ่งไปยังอีกเส้นตรงหนึ่ง ซึ่งแปลงแต่ละจุดบนเส้นตรงหนึ่งไปยังจุดบนเส้นตรงอีกเส้นหนึ่งที่มีพิกัดเดียวกัน

สองมิติ
ระบบพิกัดคาร์ทีเซียนในสองมิติ (เรียกอีกอย่างว่าระบบพิกัดสี่เหลี่ยมหรือระบบพิกัดคาร์ทีเซียนตั้งฉาก[ 7 ] ) ถูกกำหนดโดยคู่ของ เส้น ตั้งฉาก (แกน) ที่เรียงลำดับกัน หน่วยความยาวเดียวสำหรับทั้งสองแกน และการวางแนวสำหรับแต่ละแกน จุดที่แกนทั้งสองตัดกันถือเป็นจุดกำเนิดสำหรับทั้งสองแกน ทำให้แต่ละแกนกลายเป็นเส้นจำนวนสำหรับจุดP ใดๆ เส้นตรงจะถูกลากผ่านPตั้งฉากกับแต่ละแกน และตำแหน่งที่เส้นตรงนั้นตัดกับแกนจะถูกตีความว่าเป็นตัวเลข ตัวเลขสองตัวนั้น ตามลำดับที่เลือกไว้ จะเป็นพิกัดคาร์ทีเซียนของPการสร้างแบบย้อนกลับทำให้สามารถกำหนดจุดP ได้ เมื่อกำหนดพิกัดของมัน
พิกัดแรกและพิกัดที่สองเรียกว่าแกน abscissaและแกน ordinateของPตามลำดับ และจุดที่แกนทั้งสองตัดกันเรียกว่าจุดกำเนิดของระบบพิกัด โดยปกติพิกัดจะเขียนเป็นตัวเลขสองตัวในวงเล็บ เรียงตามลำดับนั้น คั่นด้วยเครื่องหมายจุลภาค เช่น(3, −10.5)ดังนั้น จุดกำเนิดจึงมีพิกัด(0, 0)และจุดบนแกนครึ่งบวกที่อยู่ห่างจากจุดกำเนิด 1 หน่วย จะมีพิกัด(1, 0)และ(0, 1 )
ในคณิตศาสตร์ ฟิสิกส์ และวิศวกรรมศาสตร์ แกนแรกมักถูกกำหนดหรือแสดงเป็นแนวนอนและวางแนวไปทางขวา ส่วนแกนที่สองเป็นแนวตั้งและวางแนวขึ้นด้านบน (อย่างไรก็ตาม ใน บริบทของ กราฟิกคอมพิวเตอร์ บางอย่าง แกนตั้งอาจวางแนวลงด้านล่าง) จุดกำเนิดมักใช้สัญลักษณ์Oและพิกัดทั้งสองมักใช้ตัวอักษรXและYหรือxและy แทน แกนเหล่านี้จึงอาจเรียกว่า แกน Xและ แกน Yการเลือกใช้ตัวอักษรมาจากธรรมเนียมดั้งเดิม ซึ่งใช้ตัวอักษรส่วนหลังเพื่อระบุค่าที่ไม่ทราบค่า ส่วนตัวอักษรส่วนแรกใช้เพื่อระบุค่าที่ทราบค่า
ระนาบยุคลิดที่มีระบบพิกัดคาร์ทีเซียนที่เลือกไว้เรียกว่าระนาบคาร์ทีเซียนในระนาบคาร์ทีเซียน เราสามารถกำหนดตัวแทนมาตรฐานของรูปทรงเรขาคณิตบางรูปได้ เช่นวงกลมหนึ่งหน่วย(รัศมีเท่ากับความยาวหนึ่งหน่วย และจุดศูนย์กลางอยู่ที่จุดกำเนิด)สี่เหลี่ยมจัตุรัสหนึ่งหน่วย(เส้นทแยงมุมมีจุดปลายอยู่ที่(0, 0)และ(1, 1))ไฮเปอร์โบลาหนึ่งหน่วยและอื่นๆ
แกนทั้งสองแบ่งระนาบออกเป็นสี่มุมฉากเรียกว่าควาดรันต์ ควาดรันต์อาจมีชื่อหรือหมายเลขกำกับได้หลายวิธี แต่โดยทั่วไปแล้ว ควาดรันต์ที่พิกัดทั้งหมดเป็นบวกจะเรียกว่า ค วาด รันต์ที่หนึ่ง
ถ้าพิกัดของจุดคือ( x , y ) ระยะห่างจาก แกน Xและ แกน Yจะเป็น | y | และ | x | ตามลำดับ โดยที่ |·| หมายถึงค่าสัมบูรณ์ของจำนวน
สามมิติ

ระบบพิกัดคาร์ทีเซียนสำหรับปริภูมิสามมิติประกอบด้วยชุดเส้นตรงสามเส้นเรียงลำดับ ( แกน ) ที่ผ่านจุดร่วม (จุดกำเนิด ) และตั้งฉากกันเป็นคู่ๆ นอกจากนี้ยังมีการกำหนดทิศทางให้กับแต่ละแกน และมีหน่วยความยาวเดียวสำหรับทั้งสามแกน เช่นเดียวกับในกรณีสองมิติ แต่ละแกนจะกลายเป็นเส้นจำนวน สำหรับจุดP ใดๆ ในปริภูมิ เราจะพิจารณาระนาบที่ผ่านจุดPซึ่งตั้งฉากกับแต่ละแกนพิกัด และตีความจุดที่ระนาบนั้นตัดกับแกนว่าเป็นจำนวน พิกัดคาร์ทีเซียนของจุดPคือจำนวนทั้งสามนั้น ตามลำดับที่เลือก การสร้างในทางกลับกันจะกำหนดจุดPจากพิกัดทั้งสามของจุดนั้น
อีกทางเลือกหนึ่งคือ สามารถกำหนดพิกัดแต่ละจุดของจุดP เป็นระยะทางจากจุด Pไปยังระนาบที่กำหนดโดยแกนอีกสองแกน โดยเครื่องหมายจะถูกกำหนดโดยทิศทางของแกนที่เกี่ยวข้อง
แกนแต่ละคู่กำหนดระนาบพิกัด ระนาบเหล่านี้แบ่งพื้นที่ออกเป็นแปดส่วนส่วนเหล่านั้นได้แก่:

โดยปกติพิกัดจะเขียนเป็นตัวเลขสามตัว (หรือสูตรพีชคณิต) ล้อมรอบด้วยวงเล็บและคั่นด้วยเครื่องหมายจุลภาค เช่น(3, −2.5, 1)หรือ( t , u + v , π /2)ดังนั้น จุดกำเนิดจึงมีพิกัด(0, 0, 0)และจุดหน่วยบนแกนทั้งสามคือ(1, 0, 0) , (0, 1, 0)และ(0, 0, 1 )
ชื่อมาตรฐานสำหรับพิกัดในแกนทั้งสามคือabscissa , ordinateและapplicate [ 8 ]พิกัดมักจะแสดงด้วยตัวอักษรx , yและz แกน เหล่านี้อาจถูกเรียกว่า แกน x , แกน yและ แกน zตามลำดับ จากนั้นระนาบพิกัดอาจถูกเรียกว่า ระนาบ xy , ระนาบ yzและระนาบ xz
ในบริบทของคณิตศาสตร์ ฟิสิกส์ และวิศวกรรม แกนสองแกนแรกมักถูกกำหนดหรือแสดงเป็นแนวนอน โดยมีแกนที่สามชี้ขึ้น ในกรณีนั้น พิกัดที่สามอาจเรียกว่าความสูงหรือระดับความสูงการวางแนวนี้มักเลือกให้มุม 90 องศาจากแกนแรกไปยังแกนที่สองดูเหมือนทวนเข็มนาฬิกาเมื่อมองจากจุด(0, 0, 1)ซึ่งเป็นธรรมเนียมที่เรียกกันทั่วไปว่า กฎมือขวา

มิติที่สูงกว่า
เนื่องจากพิกัดคาร์ทีเซียนมีเอกลักษณ์และไม่กำกวม จุดต่างๆ บนระนาบคาร์ทีเซียนจึงสามารถระบุได้ด้วยคู่ของจำนวนจริงนั่นคือ ด้วยผลคูณคาร์ทีเซียน โดยที่คือเซตของจำนวนจริงทั้งหมด ในทำนองเดียวกัน จุดต่างๆ ในปริภูมิยุคลิดมิติn ใดๆ ก็สามารถระบุได้ด้วยคู่ (รายการ) ของ จำนวนจริง nจำนวน นั่นคือ ด้วยผลคูณคาร์ทีเซียน



การสรุปโดยทั่วไป
แนวคิดของพิกัดคาร์ทีเซียนสามารถขยายให้ครอบคลุมถึงแกนที่ไม่ตั้งฉากกัน และ/หรือหน่วยที่แตกต่างกันตามแต่ละแกน ในกรณีนั้น พิกัดแต่ละค่าได้มาจากการฉายจุดลงบนแกนหนึ่งตามทิศทางที่ขนานกับแกนอื่น (หรือโดยทั่วไปแล้ว ขนานกับระนาบที่กำหนดโดยแกนอื่นๆ ทั้งหมด) ในระบบพิกัดเฉียง เช่นนี้ การคำนวณระยะทางและมุมจะต้องได้รับการปรับเปลี่ยนจากระบบพิกัดคาร์ทีเซียนมาตรฐาน และสูตรมาตรฐานหลายสูตร (เช่น สูตรพีทาโกเรียนสำหรับระยะทาง) จะใช้ไม่ได้ (ดูระนาบเชิงเส้น )
สัญลักษณ์และธรรมเนียมปฏิบัติ
พิกัดคาร์ทีเซียนของจุดมักเขียนไว้ในวงเล็บและคั่นด้วยเครื่องหมายจุลภาค เช่น(10, 5)หรือ(3, 5, 7)จุดกำเนิดมักใช้ตัวอักษรO ตัวใหญ่กำกับ ในเรขาคณิตวิเคราะห์ พิกัดที่ไม่ทราบค่าหรือพิกัดทั่วไปมักใช้ตัวอักษร ( x , y ) ในระนาบ และ ( x , y , z ) ในปริภูมิสามมิติ ธรรมเนียมนี้มาจากธรรมเนียมในพีชคณิต ซึ่งใช้ตัวอักษรที่อยู่ใกล้ท้ายตัวอักษรสำหรับค่าที่ไม่ทราบค่า (เช่น พิกัดของจุดในปัญหาทางเรขาคณิตหลายๆ ข้อ) และตัวอักษรที่อยู่ใกล้ต้นตัวอักษรสำหรับปริมาณที่กำหนด
ชื่อเรียกทั่วไปเหล่านี้มักถูกนำไปใช้ในสาขาอื่นๆ เช่น ฟิสิกส์และวิศวกรรมศาสตร์ แม้ว่าอาจจะใช้ตัวอักษรอื่นๆ ก็ได้ ตัวอย่างเช่น ในกราฟที่แสดง การเปลี่ยนแปลงของ ความดันตามเวลาพิกัดของกราฟอาจใช้สัญลักษณ์pและtแต่ละแกนโดยทั่วไปจะตั้งชื่อตามพิกัดที่วัดตามแนวแกนนั้น ดังนั้นจึงเรียกว่าแกน x แกน y แกน t เป็นต้น
อีกหนึ่งธรรมเนียมปฏิบัติทั่วไปในการตั้งชื่อพิกัดคือการใช้ดัชนี เช่น ( x₁ , x₂ , ..., xₙ )สำหรับพิกัดทั้งnตัวใน ปริภูมิ n มิติ โดยเฉพาะอย่างยิ่งเมื่อnมากกว่า 3 หรือไม่ได้ระบุไว้ บางผู้เขียนอาจนิยมใช้การกำหนดหมายเลขแบบ ( x₀ , x₁ , ..., xₙ⁻¹ ) สัญกรณ์เหล่านี้มีข้อดีอย่างยิ่งในการเขียนโปรแกรมคอมพิวเตอร์กล่าว คือ การจัดเก็บพิกัด ของจุดเป็นอาร์เรย์แทนที่จะเป็นเรคอร์ดดัชนีสามารถใช้เพื่ออ้างอิงพิกัดได้
ในการแสดงภาพทางคณิตศาสตร์ของระบบพิกัดคาร์ทีเซียนสองมิติ พิกัดแรก (โดยทั่วไปเรียกว่าแกน abscissa ) จะวัดตาม แกนแนว นอนโดยวางแนวจากซ้ายไปขวา ส่วนพิกัดที่สอง (แกนordinate ) จะวัดตาม แกนแนว ตั้งโดยปกติจะวางแนวจากล่างขึ้นบน เด็กเล็กที่เรียนรู้ระบบพิกัดคาร์ทีเซียนมักจะเรียนรู้ลำดับการอ่านค่าก่อนที่จะทำความเข้าใจ แนวคิดแกน x , yและzโดยเริ่มจากวิธีการจำแบบสองมิติ (ตัวอย่างเช่น 'เดินไปตามทางเดินแล้วขึ้นบันได' ซึ่งคล้ายกับการเดินตรงไปตาม แกน xแล้วขึ้นไปตาม แกน y ในแนวตั้ง )
อย่างไรก็ตาม กราฟิกคอมพิวเตอร์และการประมวลผลภาพมักใช้ระบบพิกัดที่มี แกน yชี้ลงด้านล่างบนหน้าจอคอมพิวเตอร์ ธรรมเนียมนี้พัฒนาขึ้นในช่วงทศวรรษ 1960 (หรือก่อนหน้านั้น) จากวิธีการจัดเก็บภาพในบัฟเฟอร์แสดงผล ในยุค แรก เริ่ม
สำหรับระบบสามมิติ ธรรมเนียมปฏิบัติคือการแสดง ระนาบ xyในแนวนอน โดย เพิ่มแกน zเพื่อแสดงความสูง (บวกขึ้นด้านบน) นอกจากนี้ ยังมีธรรมเนียมปฏิบัติในการวางแนว แกน xไปทางผู้ดู โดยเอียงไปทางขวาหรือซ้าย หากแผนภาพ ( การฉายภาพสามมิติหรือภาพวาดทัศนียภาพสองมิติ ) แสดง แกน xและyในแนวนอนและแนวตั้งตามลำดับ แกน zควรแสดงให้ชี้ "ออกนอกหน้ากระดาษ" ไปทางผู้ดูหรือกล้อง ในแผนภาพสองมิติของระบบพิกัดสามมิติ แกนzจะปรากฏเป็นเส้นหรือรังสีที่ชี้ลงและไปทางซ้ายหรือลงและไปทางขวา ขึ้นอยู่กับมุมมอง ของผู้ดูหรือกล้องที่คาดการณ์ไว้ ในแผนภาพหรือการแสดงผลใดๆ การวางแนวของแกนทั้งสามโดยรวมนั้นเป็นไปโดยพลการ อย่างไรก็ตาม การวางแนวของแกนสัมพันธ์กันควรเป็นไปตามกฎมือขวา เสมอ เว้นแต่จะระบุไว้เป็นอย่างอื่นโดยเฉพาะ กฎทางฟิสิกส์และคณิตศาสตร์ทั้งหมดถือว่ามีความเป็นมือขวาซึ่งช่วยให้เกิดความสอดคล้องกัน
สำหรับแผนภาพ 3 มิติ ชื่อ "abscissa" และ "ordinate" แทบจะไม่ถูกใช้สำหรับxและyตามลำดับ เมื่อมีการ เรียกใช้ พิกัด zบางครั้งเรียกว่าapplicateคำว่าabscissa , ordinateและapplicateบางครั้งใช้เพื่ออ้างถึงแกนพิกัดแทนที่จะเป็นค่าพิกัด[ 7 ]
ควอดแรนต์และอ็อกแทนต์

แกนของระบบคาร์ทีเซียนสองมิติแบ่งระนาบออกเป็นสี่บริเวณอนันต์ เรียกว่าควอดแรนต์ [ 7 ] แต่ละควอดแรนต์ถูกล้อมรอบด้วยแกนครึ่งสองแกน โดยทั่วไปจะกำหนดหมายเลขตั้งแต่ที่ 1 ถึงที่ 4 และใช้เลขโรมัน แทน : I (พิกัดทั้งสองมีเครื่องหมายบวก), II (แกน abscissa เป็นลบ − และแกน ordinate เป็นบวก +), III (ทั้งแกน abscissa และแกน ordinate เป็นลบ −) และ IV (แกน abscissa เป็นบวก แกน ordinate เป็นลบ −) เมื่อวาดแกนตามธรรมเนียมทางคณิตศาสตร์ การกำหนดหมายเลขจะทวนเข็มนาฬิกาโดยเริ่มจากควอดแรนต์บนขวา ("ทิศตะวันออกเฉียงเหนือ")
ในทำนองเดียวกัน ระบบคาร์ทีเซียนสามมิติจะกำหนดการแบ่งพื้นที่ออกเป็นแปดภูมิภาคหรืออ็อกแทนต์[ 7 ]ตามเครื่องหมายของพิกัดของจุด ข้อกำหนดที่ใช้ในการตั้งชื่ออ็อกแทนต์เฉพาะคือการระบุเครื่องหมาย เช่น(+ + +)หรือ(− + −)การขยายแนวคิดของควอดแรนต์และอ็อกแทนต์ไปยังจำนวนมิติใดๆ เรียกว่าออร์แธนต์และระบบการตั้งชื่อที่คล้ายกันก็ใช้ได้เช่นกัน
สูตรคาร์ทีเซียนสำหรับระนาบ
ระยะห่างระหว่างจุดสองจุด
ระยะทางแบบยุคลิดระหว่างจุดสองจุดบนระนาบที่มีพิกัดคาร์ทีเซียน คือ



นี่คือทฤษฎีบทพีทาโกรัส ในรูปแบบพิกัดคาร์ทีเซียน ในปริภูมิสามมิติ ระยะห่างระหว่างจุด x และy คือ



ซึ่งสามารถหาได้จากการประยุกต์ใช้ทฤษฎีบทพีทาโกรัสสองครั้งติดต่อกัน[ 9 ]
การแปลงแบบยุคลิด
การแปลงแบบยุคลิดหรือการเคลื่อนที่แบบยุคลิดคือการแมปจุดบนระนาบยุคลิด ไปยังจุดเหล่านั้นเอง ( แบบหนึ่งต่อหนึ่ง ) ซึ่งรักษาระยะห่างระหว่างจุดไว้ มีการแมปสี่ประเภท (เรียกอีกอย่างว่าไอโซเมตรี) ได้แก่การเลื่อนการหมุน การสะท้อนและการสะท้อนแบบเลื่อน[ 10 ]
การแปล
การเลื่อนจุดชุดหนึ่งบนระนาบ โดยคงระยะทางและทิศทางระหว่างจุดเหล่านั้นไว้ จะเทียบเท่ากับการเพิ่มค่าคงที่คู่หนึ่ง( a , b )ให้กับพิกัดคาร์ทีเซียนของทุกจุดในชุดนั้น กล่าวคือ ถ้าพิกัดเดิมของจุดหนึ่งคือ( x , y )หลังจากเลื่อนแล้ว พิกัดเหล่านั้นจะเป็น (x , y)

การหมุน
การหมุนรูปทรงทวนเข็มนาฬิกาไปรอบจุดกำเนิดด้วยมุมใดมุมหนึ่งเทียบเท่ากับการแทนที่ทุกจุดที่มีพิกัด ( x , y ) ด้วยจุดที่มีพิกัด ( x' , y' ) โดยที่


ดังนั้น:

การสะท้อนความคิด
ถ้า( x , y )คือพิกัดคาร์ทีเซียนของจุดหนึ่งแล้ว( −x , y )คือพิกัดของการสะท้อน ของจุดนั้น ข้ามแกนพิกัดที่สอง (แกน y) เสมือนว่าเส้นนั้นเป็นกระจก ในทำนองเดียวกัน( x , −y )คือพิกัดของการสะท้อนของจุดนั้นข้ามแกนพิกัดแรก (แกน x) โดยทั่วไปแล้ว การสะท้อนข้ามเส้นที่ผ่านจุดกำเนิดและทำมุมกับแกน x จะเทียบเท่ากับการแทนที่ทุกจุดที่มีพิกัด( x , y )ด้วยจุดที่มีพิกัด( x ′, y ′)โดยที่

ดังนั้น:

การสะท้อนแบบเลื่อน
การสะท้อนแบบเลื่อน (Glide reflection) คือการรวมกันของการสะท้อนข้ามเส้นตรง ตามด้วยการเลื่อนในทิศทางของเส้นตรงนั้น จะเห็นได้ว่าลำดับของการดำเนินการเหล่านี้ไม่สำคัญ (การเลื่อนอาจมาก่อน ตามด้วยการสะท้อน)
รูปแบบเมทริกซ์ทั่วไปของการแปลง
การแปลงเชิงเส้นทั้งหมดของระนาบสามารถอธิบายได้ในลักษณะเดียวกันโดยใช้เมทริกซ์ สำหรับจุดประสงค์นี้ พิกัดของจุดมักจะแสดงเป็นเมทริกซ์คอลัมน์ผลลัพธ์ของการใช้การแปลงเชิงเส้นกับจุดจะได้รับจากสูตร โดยที่ เป็น เมทริกซ์ 2×2 และเป็นเมทริกซ์คอลัมน์[ 11 ]นั่นคือ







ในบรรดาการแปลงเชิงเส้นแบบแอฟฟินการแปลงแบบยุคลิดมีลักษณะเฉพาะคือเมทริกซ์เป็นเมทริกซ์ตั้งฉากกล่าวคือ คอลัมน์ของเมทริกซ์เป็นเวกเตอร์ตั้งฉากที่มีนอร์มแบบยุคลิดเท่ากับหนึ่ง หรือกล่าวอย่างชัดเจน คือ และ



นี่เทียบเท่ากับการกล่าวว่าAคูณกับทรานสโพส ของมัน คือเมทริกซ์เอกลักษณ์หากเงื่อนไขเหล่านี้ไม่เป็นจริง สูตรนี้จะอธิบายถึงการแปลงเชิงเส้นแบบทั่วไป มากกว่า
การแปลงจะเป็นการเลื่อนตำแหน่งก็ต่อเมื่อAเป็นเมทริกซ์เอกลักษณ์การแปลงจะเป็นการหมุนรอบจุดใดจุดหนึ่งก็ต่อเมื่อAเป็นเมทริกซ์การหมุนซึ่งหมายความว่ามันเป็นเมทริกซ์ตั้งฉากและ

การสะท้อนหรือการสะท้อนแบบเลื่อนจะเกิดขึ้นเมื่อ

โดยสมมติว่าไม่ได้ใช้การแปล (นั่นคือ) การแปลงสามารถประกอบขึ้นได้โดยการคูณเมทริกซ์การแปลงที่เกี่ยวข้องเข้าด้วยกัน ในกรณีทั่วไป การใช้เมทริกซ์เสริมของการแปลงนั้นมีประโยชน์ กล่าวคือ การเขียนสูตรการแปลงใหม่ โดยที่ ด้วยเทคนิคนี้ การประกอบการแปลงเชิงเส้นตรงจะได้มาจากการคูณเมทริกซ์เสริม



การแปลงเชิงเส้น
การแปลงเชิงเส้นแบบแอฟฟินของระนาบยูคลิดคือการแปลงที่แมปเส้นตรงไปยังเส้นตรง แต่ระยะทางและมุมอาจเปลี่ยนแปลงได้ ดังที่กล่าวไว้ในหัวข้อก่อนหน้านี้ การแปลงเหล่านี้สามารถแสดงได้ด้วยเมทริกซ์เสริม:

การแปลงแบบยุคลิดเป็นการแปลงเชิงเส้นตรงที่ทำให้เมทริกซ์ 2×2 ของการแปลงนั้นเป็น เมทริกซ์ตั้งฉาก

เมทริกซ์เสริมที่แสดงถึงการประกอบกันของการแปลงเชิงเส้นสองแบบ ได้มาจากการคูณเมทริกซ์เสริมของการแปลงทั้งสองแบบเข้าด้วยกัน
การแปลงเชิงเส้นบางประเภทที่ไม่ใช่การแปลงแบบยุคลิดได้รับชื่อเฉพาะ
การปรับขนาด
ตัวอย่างของการแปลงเชิงเส้นที่ไม่ใช่แบบยุคลิดคือการปรับขนาด การทำให้รูปมีขนาดใหญ่ขึ้นหรือเล็ลงเทียบเท่ากับการคูณพิกัดคาร์ทีเซียนของทุกจุดด้วยจำนวนบวกเดียวกันmถ้า( x , y )คือพิกัดของจุดบนรูปเดิม จุดที่สอดคล้องกันบนรูปที่ปรับขนาดแล้วจะมีพิกัดเป็น

ถ้าmมากกว่า 1 รูปทรงจะใหญ่ขึ้น ถ้าmอยู่ระหว่าง 0 ถึง 1 รูปทรงจะเล็ลง
การเฉือน
การแปลงแบบเฉือนจะผลักส่วนบนของรูปสี่เหลี่ยมจัตุรัสไปด้านข้างเพื่อสร้างรูปสี่เหลี่ยมด้านขนานการเฉือนในแนวนอนนิยามได้ดังนี้:

การตัดเฉือนยังสามารถใช้ในแนวตั้งได้อีกด้วย:

การวางแนวและการถนัดมือ
ในสองมิติ

การกำหนดหรือเลือก แกน xจะกำหนด แกน y ได้ จนถึงทิศทาง กล่าวคือ แกน yจะต้องเป็นเส้นตั้งฉากกับ แกน xผ่านจุดที่ทำเครื่องหมาย 0 บน แกน xแต่สามารถเลือกได้ว่าจะกำหนดให้ครึ่งเส้นใดของเส้นตั้งฉากเป็นบวกและครึ่งเส้นใดเป็นลบ การเลือกทั้งสองแบบนี้จะกำหนดทิศทางที่แตกต่างกัน (หรือเรียกว่าความเป็นมือซ้ายหรือมือขวา ) ของระนาบพิกัดคาร์ทีเซียน
โดยทั่วไปแล้ว วิธีการวางแนวระนาบแบบหนึ่ง ซึ่งให้แกนxบวกชี้ไปทางขวา และ แกน yบวกชี้ขึ้น (โดย แกน xเป็นแกน "แรก" และ แกน yเป็นแกน "ที่สอง") ถือเป็นการ วางแนว แบบบวกหรือแบบมาตรฐานหรือเรียกอีกอย่างว่าการวางแนวแบบ มือขวา
วิธีช่วยจำที่นิยมใช้ในการกำหนดทิศทางบวกคือกฎมือขวาโดยวางมือขวาที่ปิดสนิทเล็กน้อยลงบนระนาบ โดยให้นิ้วหัวแม่มือชี้ขึ้น นิ้วอื่นๆ จะชี้จาก แกน xไปยัง แกน yในระบบพิกัดที่มีทิศทางบวก
อีกวิธีหนึ่งในการกำหนดทิศทางของระนาบคือการปฏิบัติตามกฎมือซ้ายโดยวางมือซ้ายลงบนระนาบโดยให้นิ้วโป้งชี้ขึ้น
เมื่อชี้หัวแม่มือออกจากจุดกำเนิดไปตามแกนในทิศทางบวก ความโค้งของนิ้วมือจะบ่งชี้ถึงการหมุนในทิศทางบวกตามแกนนั้น
ไม่ว่าเราจะใช้กฎใดในการกำหนดทิศทางของระนาบ การหมุนระบบพิกัดจะรักษาทิศทางเดิมไว้ การสลับแกนใดแกนหนึ่งจะทำให้ทิศทางกลับด้าน แต่การสลับทั้งสองแกนจะทำให้ทิศทางไม่เปลี่ยนแปลง
ในสามมิติ


เมื่อระบุแกนxและy แล้ว แกนเหล่านี้จะกำหนด แนวเส้นที่ แกน zควรอยู่ แต่แนวเส้นนี้มีสองทิศทางที่เป็นไปได้ ระบบพิกัดสองระบบที่เป็นไปได้ที่เกิดขึ้นเรียกว่า 'มือขวา' และ 'มือซ้าย' [ 12 ]ทิศทางมาตรฐานที่ ระนาบ xyเป็นแนวนอนและ แกน zชี้ขึ้น (และแกนxและ แกน yสร้างระบบพิกัดสองมิติที่มีทิศทางเป็นบวกใน ระนาบ xyหากสังเกตจากด้านบนของ ระนาบ xy ) เรียกว่า มือขวาหรือบวก
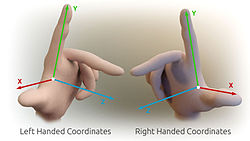
ชื่อนี้มีที่มาจากกฎมือขวาถ้าหากนิ้วชี้ของมือขวาชี้ไปข้างหน้า นิ้วกลางงอเข้าด้านในเป็นมุมฉาก และนิ้วโป้งวางเป็นมุมฉากกับทั้งสองนิ้ว นิ้วทั้งสามนี้จะแสดงทิศทางสัมพัทธ์ของ แกน x , yและzในระบบมือขวา นิ้วโป้งแสดงแกน xนิ้วชี้แสดงแกนyและนิ้วกลาง แสดงแกน zในทางกลับกัน ถ้าทำแบบเดียวกันกับมือซ้าย ก็จะได้ระบบมือซ้าย
ภาพที่ 7 แสดงระบบพิกัดมือซ้ายและมือขวา เนื่องจากวัตถุสามมิติถูกแสดงบนหน้าจอสองมิติ จึงทำให้เกิดการบิดเบือนและความกำกวม แกนที่ชี้ลง (และไปทางขวา) หมายถึงชี้ไป ยัง ผู้สังเกต ในขณะที่แกน "ตรงกลาง" หมายถึงชี้ออกไปจากผู้สังเกต วงกลมสีแดงขนานกับ ระนาบ xy ในแนวนอน และแสดงถึงการหมุนจาก แกน xไปยัง แกน y (ในทั้งสองกรณี) ดังนั้นลูกศรสีแดงจึงผ่าน หน้าแกนz
ภาพที่ 8 เป็นอีกหนึ่งความพยายามในการแสดงระบบพิกัดมือขวา อีกครั้งหนึ่ง มีความกำกวมเกิดขึ้นจากการฉายระบบพิกัดสามมิติลงบนระนาบ ผู้สังเกตหลายคนเห็นภาพที่ 8 ว่า "พลิกเข้าพลิกออก" ระหว่าง ลูกบาศก์ นูนและ "มุม" เว้าซึ่งสอดคล้องกับทิศทางที่เป็นไปได้สองทิศทางของพื้นที่ การมองภาพเป็นนูนทำให้ได้ระบบพิกัดมือซ้าย ดังนั้น วิธีที่ "ถูกต้อง" ในการมองภาพที่ 8 คือการจินตนาการว่า แกน xชี้ไปยังผู้สังเกต และจึงมองเห็นเป็นมุมเว้า
การแสดงเวกเตอร์ในฐานมาตรฐาน
จุดในอวกาศในระบบพิกัดคาร์ทีเซียนอาจแสดงด้วยเวกเตอร์ ตำแหน่ง ซึ่งสามารถคิดได้ว่าเป็นลูกศรที่ชี้จากจุดกำเนิดของระบบพิกัดไปยังจุดนั้น[ 13 ]หากพิกัดแสดงถึงตำแหน่งเชิงพื้นที่ (การกระจัด) เป็นเรื่องปกติที่จะแสดงเวกเตอร์จากจุดกำเนิดไปยังจุดที่สนใจเป็นในสองมิติ เวกเตอร์จากจุดกำเนิดไปยังจุดที่มีพิกัดคาร์ทีเซียน (x, y) สามารถเขียนได้ดังนี้:


โดยที่และเป็นเวกเตอร์หน่วยในทิศทางของ แกน xและ แกน yตามลำดับ ซึ่งโดยทั่วไปเรียกว่าฐานมาตรฐาน (ในบางพื้นที่การใช้งานอาจเรียกว่าเวกเตอร์เวกเตอร์ ) ในทำนองเดียวกัน ในสามมิติ เวกเตอร์จากจุดกำเนิดไปยังจุดที่มีพิกัดคาร์ทีเซียนสามารถเขียนได้ดังนี้: [ 14 ]




ที่ไหนและ



ไม่มี วิธีการตีความ ตามธรรมชาติในการคูณเวกเตอร์เพื่อให้ได้เวกเตอร์อีกตัวที่ใช้ได้ในทุกมิติ อย่างไรก็ตาม มีวิธีใช้จำนวนเชิงซ้อนเพื่อให้ได้การคูณดังกล่าว ในระนาบพิกัดคาร์ทีเซียนสองมิติ ให้ระบุจุดที่มีพิกัด( x , y )ด้วยจำนวนเชิงซ้อนz = x + iyโดยที่iคือหน่วยจินตนาการและระบุด้วยจุดที่มีพิกัด(0, 1)ดังนั้นจึงไม่ใช่เวกเตอร์หน่วยในทิศทางของ แกน xเนื่องจากจำนวนเชิงซ้อนสามารถคูณกันได้ผลลัพธ์เป็นจำนวนเชิงซ้อนอีกตัว การระบุนี้จึงเป็นวิธีการ "คูณ" เวกเตอร์ ในปริภูมิคาร์ทีเซียนสามมิติ สามารถทำการระบุที่คล้ายกันได้โดยใช้เซตย่อยของควอเทอร์เนียน
ดูเพิ่มเติม
- หุ่นยนต์พิกัดคาร์ทีเซียน
- แนวนอนและแนวตั้ง
- แผนภาพโจนส์ซึ่งแสดงตัวแปรสี่ตัวแทนที่จะเป็นสองตัว
- พิกัดเชิงตั้งฉากเป็นระบบพิกัดโค้งชนิดหนึ่ง
- ระบบพิกัดเชิงขั้ว
- ตารางปกติ
- ระบบพิกัดทรงกลม
หมายเหตุ
การอ้างอิง
- ^ Bix, Robert A.; D'Souza, Harry J. "เรขาคณิตเชิงวิเคราะห์" . สารานุกรมบริแทนนิกา. สืบค้นเมื่อ6 สิงหาคม 2017 .
- ^เคนท์และวูยาโควิช 2017ดูที่นี่
- ^ Katz, Victor J. (2009). ประวัติศาสตร์ของคณิตศาสตร์: บทนำ (ฉบับที่ 3). บอสตัน: Addison-Wesley. หน้า 484. ISBN 978-0-321-38700-4. OCLC 71006826 .
- ^เบอร์ตัน 2011 , หน้า 374.
- ^เบอร์ลินสกี้ 2011
- ^แอกซ์เลอร์ 2015 , หน้า 1
- ^ a b c d Ivanov, AB (2001) [1994], "ระบบพิกัดเชิงตั้งฉากแบบคาร์ทีเซียน" , สารานุกรมคณิตศาสตร์ , EMS Press
- ^ "พิกัดคาร์ทีเซียน" . planetmath.org . สืบค้นเมื่อ25 สิงหาคม 2024 .
- ^ฮิวส์-ฮัลเลตต์, แมคคัลลัม และ เกลสัน 2013
- ^สมาร์ท 1998บทที่ 2
- ↑แบรนแนน, เอสเพลน & เกรย์ 1998 , หน้า 1. 49.
- ^ Anton, Bivens & Davis 2021 , หน้า 657
- ↑ Brannan, Esplen & Grey 1998 , ภาคผนวก 2, หน้า 377–382
- ^กริฟฟิธส์ 1999
เอกสารอ้างอิงทั่วไปและเอกสารอ้างอิงที่อ้างถึง
- Axler, Sheldon (2015). พีชคณิตเชิงเส้นที่ถูกต้อง . ตำราคณิตศาสตร์ระดับปริญญาตรี. Springer. doi : 10.1007/978-3-319-11080-6 . ISBN 978-3-319-11079-0เก็บถาวรจากต้นฉบับเมื่อวันที่ 27 พฤษภาคม 2022 เรียกดูเมื่อวันที่ 17 เมษายน 2022
- เบอร์ลินสกี, เดวิด (2011). การสำรวจแคลคูลัส . สำนักพิมพ์นอปฟ์ ดับเบิลเดย์. ISBN 9780307789730.
- Brannan, David A.; Esplen, Matthew F.; Gray, Jeremy J. (1998). เรขาคณิต . เคมบริดจ์: สำนักพิมพ์มหาวิทยาลัยเคมบริดจ์. ISBN 978-0-521-59787-6.
- เบอร์ตัน, เดวิด เอ็ม. (2011). ประวัติศาสตร์คณิตศาสตร์/บทนำ (ฉบับที่ 7). นิวยอร์ก: แมคกรอว์-ฮิลล์. ISBN 978-0-07-338315-6.
- Griffiths, David J. (1999). บทนำสู่พลศาสตร์ไฟฟ้า . Prentice Hall. ISBN 978-0-13-805326-0.
- Hughes-Hallett, Deborah; McCallum, William G.; Gleason, Andrew M. (2013). แคลคูลัส: ตัวแปรเดียวและหลายตัวแปร (ฉบับที่ 6). John Wiley & Sons . ISBN 978-0470-88861-2.
- เคนท์, อเล็กซานเดอร์ เจ.; วูยาโควิช, ปีเตอร์ (4 ตุลาคม 2017). คู่มือการทำแผนที่และภูมิศาสตร์ของรูทเลดจ์ . รูทเลดจ์. ISBN 9781317568216.
- Smart, James R. (1998), เรขาคณิตสมัยใหม่ (ฉบับที่ 5), Pacific Grove: Brooks/Cole, ISBN 978-0-534-35188-5
- Anton, Howard; Bivens, Irl C.; Davis, Stephen (2021). แคลคูลัส: หลายตัวแปร . John Wiley & Sons . หน้า 657. ISBN 978-1-119-77798-4.
อ่านเพิ่มเติม
- เดส์การ์ต, เรเน่ (2001). วาทกรรมว่าด้วยวิธีการ ทัศนศาสตร์ เรขาคณิต และอุตุนิยมวิทยาแปลโดย พอล เจ. ออสแคมป์ (ฉบับปรับปรุง). อินเดียนาโพลิส, อินเดียนา: สำนักพิมพ์แฮ็กเก็ตต์. ISBN 978-0-87220-567-3. OCLC 488633510 .
- Korn GA, Korn TM (1961). คู่มือคณิตศาสตร์สำหรับนักวิทยาศาสตร์และวิศวกร (ฉบับพิมพ์ครั้งที่ 1). นิวยอร์ก: McGraw-Hill. หน้า 55–79 . LCCN 59-14456 . OCLC 19959906 .
- Margenau H , Murphy GM (1956). คณิตศาสตร์ของฟิสิกส์และเคมี . นิวยอร์ก: D. van Nostrand. LCCN 55-10911 .
- Moon P, Spencer DE (1988). "พิกัดสี่เหลี่ยมผืนผ้า (x, y, z)". คู่มือทฤษฎีสนาม รวมถึงระบบพิกัด สมการเชิงอนุพันธ์ และคำตอบ (ฉบับแก้ไขครั้งที่ 2 และ 3). นิวยอร์ก: Springer-Verlag. หน้า 9–11 (ตาราง 1.01). ISBN 978-0-387-18430-2.
- Morse PM , Feshbach H (1969). วิธีการทางฟิสิกส์เชิงทฤษฎี เล่ม 1 (ฉบับพิมพ์ครั้งที่ 1). นิวยอร์ก: McGraw-Hill. ISBN 978-0-07-043316-8. ลคซีเอ็น 52-11515 .
- ซาวเออร์ อาร์, Szabó I (1967) แมทเธมาติส ฮิลฟ์สมิตเทล เด อินเฌอเนียร์ นิวยอร์ก: สปริงเกอร์ แวร์แล็ก. ลคซีเอ็น 67-25285 .
ลิงก์ภายนอก
- ระบบพิกัดคาร์ทีเซียน
- ไวส์สไตน์, เอริค ดับเบิลยู. "พิกัดคาร์ทีเซียน" . แมธเวิลด์ .
- โปรแกรมแปลงพิกัด – แปลงระหว่างพิกัดเชิงขั้ว พิกัดคาร์ทีเซียน และพิกัดทรงกลม
- พิกัดของจุด – เครื่องมือแบบโต้ตอบเพื่อสำรวจพิกัดของจุด
- คลาส JavaScript โอเพนซอร์สสำหรับการจัดการระบบพิกัดคาร์ทีเซียน 2 มิติ/3 มิติ
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ระบบพิกัดคาร์ทีเซียน
ในทาง เรขาคณิต ระบบ พิกัดคาร์ที เซียน (UK: /kɑːrˈtiːzjən / , US : / kɑːrˈtiːʒən / ) ใน ระนาบ คือ ระบบ พิกัด ที่ ระบุ แต่ละ จุด ได้ อย่าง เฉพาะ เจาะจง ด้วย คู่ ของ จำนวน จริง...
ประวัติศาสตร์
คำคุณศัพท์ Cartesian หมายถึง นักคณิตศาสตร์ และ นักปรัชญา ชาวฝรั่งเศส เรเน่ เดส์การ์ต ผู้เผยแพร่แนวคิดนี้ในปี ค.ศ.
มิติเดียว
เส้นตรงเชิงเส้นตรง ที่มีระบบพิกัดคาร์ทีเซียนที่เลือกไว้ เรียกว่า เส้นจำนวน ทุกจุดบนเส้นจำนวนจะมีพิกัดเป็นจำนวนจริง และทุกจำนวนจริงจะแทนจุดใดจุดหนึ่งบนเส้นจำนวนนั้น
สองมิติ
ระบบพิกัดคาร์ทีเซียนในสองมิติ (เรียกอีกอย่างว่า ระบบพิกัดสี่เหลี่ยม หรือ ระบบพิกัดคาร์ทีเซียนตั้งฉาก [ 7 ] ) ถูกกำหนดโดย คู่ ของ เส้น ตั้งฉาก (แกน) ที่เรียงลำดับกัน หน่วยความยาว เดียวสำหรับทั้งสองแกน และการวางแนวสำหรับแต่ละแกน...