อ่าน 31 นาที
ระบบพลวัต
ใน คณิตศาสตร์ ฟิสิกส์ วิศวกรรม และ ทฤษฎีระบบ ระบบ พลวัต คือคำอธิบายว่าระบบเปลี่ยนแปลงไปอย่างไรเมื่อเวลา ผ่าน ไป
ระบบพลวัต

ในคณิตศาสตร์ฟิสิกส์วิศวกรรมและทฤษฎีระบบ ระบบพลวัตคือคำอธิบายว่าระบบเปลี่ยนแปลงไปอย่างไรเมื่อเวลา ผ่านไป
ตัวอย่างเช่นนักดาราศาสตร์สามารถบันทึกตำแหน่งการเคลื่อนที่ของดาวเคราะห์บนท้องฟ้าได้จากการทดลอง และถือได้ว่าเป็นคำอธิบายที่สมบูรณ์เพียงพอของระบบพลวัต ในกรณีของดาวเคราะห์นั้น ยังมีความรู้เพียงพอที่จะเข้ารหัสข้อมูลนี้เป็นชุดสมการเชิงอนุพันธ์ที่มีเงื่อนไขเริ่มต้นหรือเป็นแผนที่จากสถานะปัจจุบันไปยังสถานะในอนาคตในปริภูมิสถานะ ที่กำหนดไว้ล่วงหน้า ด้วย พารามิเตอร์ เวลา t หรือเป็นวงโคจรในปริภูมิเฟส [ 1 ] :หมายเหตุ บทที่ 2.1
การศึกษาระบบพลวัตเป็นจุดสนใจของทฤษฎีระบบพลวัต ซึ่งมีการ ประยุกต์ใช้ในหลากหลายสาขา เช่น คณิตศาสตร์ ฟิสิกส์[ 2 ] [ 3 ]ชีววิทยา [ 4 ]เคมีวิศวกรรม[ 5 ]เศรษฐศาสตร์[ 6 ]ประวัติศาสตร์และการแพทย์ระบบพลวัตเป็นส่วนสำคัญของทฤษฎีความโกลาหลพลวัตแผนที่โลจิสติกทฤษฎีการแยกสาขากระบวนการประกอบตนเองและ การ จัดระเบียบตนเองและแนวคิด ขอบแห่งความโกลาหล
ภาพรวม

แนวคิดของระบบพลวัตมีต้นกำเนิดมาจากกลศาสตร์ของนิวตันและโดยเฉพาะอย่างยิ่งในกลศาสตร์ดาราศาสตร์ที่นั่น เช่นเดียวกับในวิทยาศาสตร์ธรรมชาติและสาขาวิศวกรรมอื่นๆ มีความจำเป็นต้องทำนายวิวัฒนาการของระบบ แต่บางทีอาจมีคำถามอื่นๆ เช่น เสถียรภาพ พฤติกรรมเชิงคุณภาพหรือระยะยาว การพึ่งพาพารามิเตอร์ การมีอยู่ของพฤติกรรมเป็นคาบ สุ่ม หรืออลวน[ 1 ] : ส่วนที่ 1 ความสัมพันธ์จากสถานะหนึ่งไปยังอีกสถานะหนึ่งอาจเป็นแบบชัดเจน เช่น ฟังก์ชันในพารามิเตอร์ t ที่ทำนายตำแหน่งและความเร็วของอนุภาค หรือแบบไม่ชัดเจน เช่นสมการเชิงอนุพันธ์ สมการเชิงผลต่างหรือมาตราส่วนเวลา อื่นๆ บางครั้งอาจไม่สามารถกำหนดคำอธิบายดังกล่าวได้ อาจไม่มีสมการเชิงอนุพันธ์ที่ทำนายราคาหุ้นหรืออาจเป็นไปไม่ได้ที่จะสร้างขึ้นมา แต่ยังคงพูดถึงราคาหุ้นได้ โดยพิจารณาจากข้อมูลการทดลองที่เปลี่ยนแปลงไปตามเวลา[ 7 ]
คุณสมบัติที่สำคัญคือการมีอยู่และความเป็นเอกลักษณ์ของคำตอบความสามารถในการบูรณาการ (เช่น การมีอยู่ของปริมาณที่อนุรักษ์ไว้) ความเป็นไปได้ในการแก้ปัญหาระบบ และความสามารถในการคำนวณสถานะ ณ จุดเวลาใดๆ คุณสมบัติอื่นๆ ได้แก่ ระบบนั้นเป็นแบบไม่ต่อเนื่องต่อเนื่อง สามารถหา อนุพันธ์ได้เรียบกำหนดได้ เออร์ โกดิกสโตแคสติกหรืออลวน[ 8 ] [ 9 ]
หากสามารถแก้ระบบได้แล้ว เมื่อกำหนดจุดเริ่มต้นแล้ว ก็จะสามารถกำหนดตำแหน่งในอนาคตทั้งหมดของจุดนั้นได้ ซึ่งกลุ่มของจุดเหล่านั้นเรียกว่าวิถีโคจรหรือวง โคจร
ก่อนการมาถึงของคอมพิวเตอร์การค้นหาวงโคจรต้องใช้เทคนิคทางคณิตศาสตร์ที่ซับซ้อนและสามารถทำได้เฉพาะกับระบบไดนามิกบางประเภทเท่านั้น[ 10 ]วิธีการเชิงตัวเลขที่นำมาใช้กับเครื่องคำนวณอิเล็กทรอนิกส์ได้ทำให้การกำหนดวงโคจรของระบบไดนามิกง่ายขึ้น[ 11 ]

สำหรับระบบพลวัตแบบง่าย การทราบวิถีการเคลื่อนที่มักจะเพียงพอ แต่ระบบพลวัตส่วนใหญ่มีความซับซ้อนเกินกว่าจะเข้าใจได้โดยพิจารณาจากวิถีการเคลื่อนที่แต่ละจุด ความยากลำบากเกิดขึ้นเนื่องจาก:
- ระบบที่ศึกษาอาจทราบได้เพียงโดยประมาณเท่านั้น—พารามิเตอร์ของระบบอาจไม่เป็นที่ทราบอย่างแม่นยำ หรืออาจมีบางเทอมที่ขาดหายไปจากสมการ การประมาณค่าที่ใช้ทำให้เกิดข้อสงสัยเกี่ยวกับความถูกต้องหรือความเกี่ยวข้องของวิธีการแก้ปัญหาเชิงตัวเลข เพื่อแก้ไขปัญหาเหล่านี้ จึงมีการนำแนวคิดเรื่องเสถียรภาพหลายประการมาใช้ในการศึกษาระบบพลวัต เช่นเสถียรภาพของ Lyapunovหรือเสถียรภาพเชิงโครงสร้างเสถียรภาพของระบบพลวัตหมายความว่ามีแบบจำลองหรือเงื่อนไขเริ่มต้นบางประเภทที่วิถีโคจรจะเทียบเท่ากัน การดำเนินการเปรียบเทียบวงโคจรเพื่อสร้างความเท่าเทียม กัน จะเปลี่ยนแปลงไปตามแนวคิดเรื่องเสถียรภาพที่แตกต่างกัน[ 1 ] : ภาคผนวก 1.1
- ประเภทของวิถีการเคลื่อนที่อาจมีความสำคัญมากกว่าวิถีการเคลื่อนที่เฉพาะเจาะจงเพียงวิถีเดียว วิถีการเคลื่อนที่บางอย่างอาจเป็นแบบคาบ ในขณะที่บางอย่างอาจเคลื่อนที่ไปมาระหว่างสถานะต่างๆ ของระบบ การใช้งานมักต้องการการแจงนับคลาสเหล่านี้หรือการรักษาระบบให้อยู่ในคลาสเดียว การจำแนกวิถีการเคลื่อนที่ที่เป็นไปได้ทั้งหมดนำไปสู่การศึกษาเชิงคุณภาพของระบบพลวัต นั่นคือ คุณสมบัติที่ไม่เปลี่ยนแปลงภายใต้การเปลี่ยนแปลงพิกัดระบบพลวัตเชิงเส้นและระบบที่มีตัวเลขสองตัวที่อธิบายสถานะเป็นตัวอย่างของระบบพลวัตที่เข้าใจคลาสที่เป็นไปได้ของวงโคจร[ 12 ]
- พฤติกรรมของวิถีการเคลื่อนที่ตามฟังก์ชันของพารามิเตอร์อาจเป็นสิ่งที่จำเป็นสำหรับการใช้งาน เมื่อพารามิเตอร์เปลี่ยนแปลง ระบบไดนามิกอาจมีจุดแยกสาขาที่พฤติกรรมเชิงคุณภาพของระบบไดนามิกเปลี่ยนแปลงไป ตัวอย่างเช่น อาจเปลี่ยนจากการเคลื่อนที่แบบเป็นคาบอย่างเดียวไปเป็นพฤติกรรมที่ดูเหมือนไม่แน่นอน เช่นเดียวกับการ เปลี่ยนไปสู่ความปั่นป่วน ของของเหลว[ 13 ]
- วิถีการเคลื่อนที่ของระบบอาจดูผิดปกติราวกับสุ่ม ในกรณีเหล่านี้ อาจจำเป็นต้องคำนวณค่าเฉลี่ยโดยใช้วิถีการเคลื่อนที่ที่ยาวมากหนึ่งเส้นหรือวิถีการเคลื่อนที่ที่แตกต่างกันหลายเส้น ค่าเฉลี่ยได้รับการกำหนดไว้อย่างดีสำหรับระบบเออร์โกดิกและความเข้าใจที่ละเอียดมากขึ้นได้รับการพัฒนาสำหรับระบบไฮเปอร์โบลิกการทำความเข้าใจด้านความน่าจะเป็นของระบบพลวัตได้ช่วยสร้างรากฐานของกลศาสตร์สถิติและความโกลาหล[ 14 ]
ตัวอย่าง
ตัวอย่างง่ายๆ ได้แก่แบบจำลองทางคณิตศาสตร์ที่อธิบายการแกว่งของลูกตุ้มนาฬิกาการไหลของน้ำในท่อการเคลื่อนที่แบบสุ่มของอนุภาคในอากาศและจำนวนปลาในทะเลสาบในช่วงฤดูใบไม้ผลิแต่ละปี
 ปัญหาวัตถุสามชิ้น : วิถีการเคลื่อนที่โดยประมาณของวัตถุสามชิ้นที่เหมือนกัน ซึ่งตั้งอยู่ที่จุดยอดของสามเหลี่ยมด้านไม่เท่า และมีความเร็วเริ่มต้นเป็นศูนย์
ปัญหาวัตถุสามชิ้น : วิถีการเคลื่อนที่โดยประมาณของวัตถุสามชิ้นที่เหมือนกัน ซึ่งตั้งอยู่ที่จุดยอดของสามเหลี่ยมด้านไม่เท่า และมีความเร็วเริ่มต้นเป็นศูนย์ แผนที่แมวของอาร์โนลด์ : ภาพแสดงให้เห็นว่าแผนที่เชิงเส้นขยายสี่เหลี่ยมจัตุรัสหน่วยอย่างไร และชิ้นส่วนต่างๆ ถูกจัดเรียงใหม่เมื่อ ทำการดำเนิน การโมดูลัสเส้นที่มีลูกศรแสดงทิศทางการหดตัวและการขยายตัวของปริภูมิไอเกน
แผนที่แมวของอาร์โนลด์ : ภาพแสดงให้เห็นว่าแผนที่เชิงเส้นขยายสี่เหลี่ยมจัตุรัสหน่วยอย่างไร และชิ้นส่วนต่างๆ ถูกจัดเรียงใหม่เมื่อ ทำการดำเนิน การโมดูลัสเส้นที่มีลูกศรแสดงทิศทางการหดตัวและการขยายตัวของปริภูมิไอเกน แผนที่ของเบเกอร์ : ตัวอย่างของการวัดที่ไม่เปลี่ยนแปลงภายใต้การกระทำของแผนที่ของเบเกอร์ (ที่ไม่ได้หมุน): การวัดที่ไม่เปลี่ยนแปลงการใช้แผนที่ของเบเกอร์กับภาพนี้จะให้ผลลัพธ์เป็นภาพที่เหมือนเดิมทุกประการ
แผนที่ของเบเกอร์ : ตัวอย่างของการวัดที่ไม่เปลี่ยนแปลงภายใต้การกระทำของแผนที่ของเบเกอร์ (ที่ไม่ได้หมุน): การวัดที่ไม่เปลี่ยนแปลงการใช้แผนที่ของเบเกอร์กับภาพนี้จะให้ผลลัพธ์เป็นภาพที่เหมือนเดิมทุกประการ บิลเลียด : อนุภาคที่เคลื่อนที่อยู่ภายในสนามกีฬาบุนิโมวิช ซึ่งเป็นสนามบิลเลียดไร้ระเบียบที่มีชื่อเสียง
บิลเลียด : อนุภาคที่เคลื่อนที่อยู่ภายในสนามกีฬาบุนิโมวิช ซึ่งเป็นสนามบิลเลียดไร้ระเบียบที่มีชื่อเสียง บิลเลียดนอก : กำหนดโดยสัมพันธ์กับรูปห้าเหลี่ยม
บิลเลียดนอก : กำหนดโดยสัมพันธ์กับรูปห้าเหลี่ยม พลศาสตร์ของลูกบอลที่กระดอน : การเคลื่อนที่ไม่ได้เป็นรูปทรงพาราโบลา อย่างสมบูรณ์ เนื่องจากแรงต้านอากาศ
พลศาสตร์ของลูกบอลที่กระดอน : การเคลื่อนที่ไม่ได้เป็นรูปทรงพาราโบลา อย่างสมบูรณ์ เนื่องจากแรงต้านอากาศ
 การประยุกต์ใช้พหุนามกำลังสองเชิงซ้อนแบบเรียก ซ้ำ เป็นแผนที่ระนาบเชิงซ้อนทำให้เกิดระบบพลวัตขึ้น ในที่นี้มีระนาบพลวัตที่มีเซตจูเลียและวงโคจรวิกฤต
การประยุกต์ใช้พหุนามกำลังสองเชิงซ้อนแบบเรียก ซ้ำ เป็นแผนที่ระนาบเชิงซ้อนทำให้เกิดระบบพลวัตขึ้น ในที่นี้มีระนาบพลวัตที่มีเซตจูเลียและวงโคจรวิกฤต การเคลื่อนที่ของลูกตุ้มคู่แบบผสม (จากการคำนวณเชิงตัวเลขของสมการการเคลื่อนที่)
การเคลื่อนที่ของลูกตุ้มคู่แบบผสม (จากการคำนวณเชิงตัวเลขของสมการการเคลื่อนที่)![พล็อตการแปลงไดอะดิก xy โดยที่ x = x0 ∈ [0, 1] เป็นจำนวนตรรกยะ และ y = xn สำหรับทุก n](//upload.wikimedia.org/wikipedia/commons/thumb/d/dd/Dyadic_trans.gif/250px-Dyadic_trans.gif) พล็อต การแปลงไดอะดิกxyโดยที่x = x 0 ∈ [0, 1] เป็นจำนวนตรรกยะและy = x nสำหรับทุก n
พล็อต การแปลงไดอะดิกxyโดยที่x = x 0 ∈ [0, 1] เป็นจำนวนตรรกยะและy = x nสำหรับทุก n ตัวดึงดูดลอเรนซ์เกิดขึ้นในการศึกษาออสซิลเลเตอร์ลอเรนซ์ซึ่งเป็นระบบพลวัต
ตัวดึงดูดลอเรนซ์เกิดขึ้นในการศึกษาออสซิลเลเตอร์ลอเรนซ์ซึ่งเป็นระบบพลวัต ตัวอย่างของกระแสน้ำวนคาร์มัน (Kármán vortex street ) ซึ่งเป็นปรากฏการณ์ที่เกิดขึ้นใหม่จากพลศาสตร์ของไหล
ตัวอย่างของกระแสน้ำวนคาร์มัน (Kármán vortex street ) ซึ่งเป็นปรากฏการณ์ที่เกิดขึ้นใหม่จากพลศาสตร์ของไหล ระบบ คิกโรเตอร์ (Kicked Rotor)ซึ่งเป็นระบบอลวนที่มีชื่อเสียง
ระบบ คิกโรเตอร์ (Kicked Rotor)ซึ่งเป็นระบบอลวนที่มีชื่อเสียง









![พล็อตการแปลงไดอะดิก xy โดยที่ x = x0 ∈ [0, 1] เป็นจำนวนตรรกยะ และ y = xn สำหรับทุก n](https://upload.wikimedia.org/wikipedia/commons/thumb/d/dd/Dyadic_trans.gif/250px-Dyadic_trans.gif)





ตัวอย่างคลาสสิกอื่นๆ ได้แก่:
แผนที่ทางคณิตศาสตร์ใดๆก็สามารถนำมาใช้เป็นนิยามของระบบพลวัตได้ ตัวอย่างเช่น:
ประวัติศาสตร์

หลายคนถือว่าอองรี ปวงกาเร นักคณิตศาสตร์ชาวฝรั่งเศส เป็นผู้ก่อตั้งระบบพลวัต[ 15 ]ปวงกาเรตีพิมพ์เอกสารทางวิชาการคลาสสิกสองฉบับ ได้แก่ "วิธีการใหม่ของกลศาสตร์ท้องฟ้า" (พ.ศ. 2435–2442) และ "การบรรยายเกี่ยวกับกลศาสตร์ท้องฟ้า" (พ.ศ. 2448–2453) ในเอกสารเหล่านี้ เขาได้นำผลการวิจัยไปประยุกต์ใช้กับปัญหาการเคลื่อนที่ของวัตถุสามชิ้น และศึกษาพฤติกรรมของคำตอบโดยละเอียด (ความถี่ เสถียรภาพ เชิงเส้นกำกับ และอื่นๆ) เอกสารเหล่านี้รวมถึงทฤษฎีบทการเกิดซ้ำของปวงกาเรซึ่งระบุว่าระบบบางระบบจะกลับคืนสู่สถานะที่ใกล้เคียงกับสถานะเริ่มต้นหลังจากช่วงเวลาที่ยาวนานพอสมควรแต่จำกัด[ 1 ] : ภาคผนวก 1.1.1
อเล็กซานเดอร์ เลียปูนอฟได้พัฒนาวิธีการประมาณค่าที่สำคัญหลายวิธี วิธีการของเขาซึ่งเขาพัฒนาขึ้นในปี พ.ศ. 2342 ทำให้สามารถกำหนดเสถียรภาพของชุดสมการเชิงอนุพันธ์สามัญได้ เขาสร้างทฤษฎีสมัยใหม่เกี่ยวกับเสถียรภาพของระบบพลวัต[ 1 ] : ภาคผนวก 1.1
ในปี พ.ศ. 2456 George David Birkhoff ได้พิสูจน์ " ทฤษฎีบทเรขาคณิตสุดท้าย " ของ Poincaré ซึ่งเป็นกรณีพิเศษของปัญหาวัตถุสามชิ้นผลลัพธ์นี้ทำให้เขามีชื่อเสียงไปทั่วโลก ในปี พ.ศ. 2460 เขาได้ตีพิมพ์Dynamical Systems [ 16 ]
ผลงานที่ยั่งยืนที่สุดของ Birkhoff คือการค้นพบทฤษฎีบทเออร์โกดิก ในปี 1931 การผสมผสานความเข้าใจจากฟิสิกส์เกี่ยวกับสมมติฐานเออร์โกดิกกับทฤษฎีการวัด ทฤษฎีบทนี้ได้แก้ปัญหาพื้นฐานของ กลศาสตร์เชิงสถิติอย่างน้อยก็ในทางทฤษฎีทฤษฎีบทเออร์โกดิกยังมีผลกระทบต่อพลศาสตร์อีกด้วย[ 1 ] : ภาคผนวก 1.2

สตีเฟน สเมลก็ได้สร้างความก้าวหน้าอย่างมากเช่นกัน ผลงานชิ้นแรกของเขาคือ " เกือกม้าสเมล"ซึ่งเป็นจุดเริ่มต้นของการวิจัยที่สำคัญในด้านระบบพลวัต นอกจากนี้เขายังได้ร่างโครงงานวิจัยที่ดำเนินการโดยนักวิจัยคนอื่นๆ อีกมากมาย
Oleksandr Mykolaiovych Sharkovskyได้พัฒนาทฤษฎีบท Sharkovskyเกี่ยวกับคาบของระบบพลวัตแบบไม่ต่อเนื่องในปี 1964 หนึ่งในผลลัพธ์ของทฤษฎีบทนี้คือ หากระบบพลวัตแบบไม่ต่อเนื่องบนเส้นจำนวนจริงมีจุดคาบที่มีคาบ 3 แล้ว ระบบนั้นจะต้องมีจุดคาบที่มีคาบอื่น ๆ ทุกคาบด้วย[ 1 ] : ภาคผนวก 1.4

ในช่วงปลายศตวรรษที่ 20 มุมมองระบบพลวัตต่อสมการเชิงอนุพันธ์ย่อยเริ่มได้รับความนิยม วิศวกรเครื่องกลชาวปาเลสไตน์Ali H. Nayfehได้ประยุกต์ใช้พลวัตแบบไม่เชิงเส้นในระบบเครื่องกลและวิศวกรรม[ 17 ] งานบุกเบิกของเขาในด้านพลวัต แบบ ไม่เชิง เส้นประยุกต์มีอิทธิพลต่อการก่อสร้างและการบำรุงรักษาเครื่องจักรและโครงสร้างที่ พบเห็นได้ทั่วไปในชีวิตประจำ วันเช่นเรือเครนสะพานอาคารตึกระฟ้าเครื่องยนต์เจ็ทเครื่องยนต์จรวดเครื่องบินและยานอวกาศ [ 18 ]
การสรุปโดยทั่วไป
นิยามที่ครอบคลุมที่สุดนี้ได้รวมเอาแนวคิดหลายอย่างเข้าไว้ด้วยกันในคณิตศาสตร์เช่นสมการเชิงอนุพันธ์สามัญและทฤษฎีเออร์โกดิกฟิสิกส์เช่นปริภูมิเฟสสถานะควอนตัมและสถานะเทอร์โมไดนามิกวิศวกรรมศาสตร์เช่นทฤษฎีระบบทฤษฎีการควบคุมและแม้กระทั่งทฤษฎี สารสนเทศ
สัญชาตญาณทางคณิตศาสตร์
จาก มุมมอง ทางคณิตศาสตร์ในกรณีทั่วไปที่สุด พื้นที่สถานะ X จะถูกมองว่าเป็นเซต ทั่วไป ของพีชคณิตนามธรรมพื้นที่ X นี้มี โครงสร้าง เซมิกรุปอยู่บนนั้น (เช่น ที่ต้องการเพียงคุณสมบัติการเชื่อมโยง ) และมักจะมีตัวเลือกที่เป็นธรรมชาติสำหรับ องค์ประกอบ เอกลักษณ์ซึ่งโดยทั่วไปจะแนบกับจุดกำเนิดของกรอบอ้างอิงที่ เลือก เซมิกรุปนี้สามารถตีความได้อย่างเป็นธรรมชาติว่าเป็นพิกัดเวลา t [ 19 ]ในความเป็นจริง เวลามีการดำเนินการบวกและจุดกำเนิด ซึ่งก็คือเอกลักษณ์ เช่นเดียวกับกลุ่ม การกระทำของเซมิกรุปบน X คือเซตของแผนที่จาก X ไปยังตัวมันเองซึ่งเป็นพารามิเตอร์ในเวลา t และนี่คือวิวัฒนาการของเวลาอย่างเป็นธรรมชาติ[ 20 ]
การสรุปทั่วไปของปริภูมิสถานะ
เป็นไปได้ที่จะอนุญาตให้เลือก พื้นที่ สถานะ ที่แตกต่างกันได้ เช่น พื้นที่ฟังก์ชัน (เช่น ความดัน อุณหภูมิ และความเร็วของก๊าซในจรวดเป็นฟังก์ชันในพื้นที่ของคำตอบของสม การเชิงอนุพันธ์ย่อยพลศาสตร์ของไหลบางอย่าง และอาจเปลี่ยนแปลงไปตามเวลา) [ 21 ] [ 22 ]พื้นที่สถานะควอนตัม (เช่น สถานะของอะตอมสามารถอธิบายได้ด้วยชุดของฟังก์ชันในพื้นที่ฮิลเบิร์ตและชุดของความน่าจะ เป็น สำหรับสิ่งเหล่านี้) [ 22 ] [ 23 ]หรือแมนิโฟลด์ (เช่น สถานะของหลุมดำสามารถอธิบายได้ด้วยเทนเซอร์เมตริกบนแมนิโฟลด์รีมันน์และตำแหน่งของมันจะเป็นเวกเตอร์ในแมนิโฟลด์เดียวกัน) [ 24 ]ตัวเลือกอื่นๆ อาจเป็นพื้นที่เฟสพื้นที่การกำหนดค่า หรือแม้แต่พื้นที่แบบไม่ต่อเนื่อง (เช่น ชุดของจำนวนเฉพาะหรือฟิลด์จำกัด ) [ 25 ]
เวลาในฐานะแมนิโฟลด์หลายมิติ

เวลาสามารถสรุปได้ว่าเป็นชุดพารามิเตอร์ต่อเนื่องทั่วไป เช่น พารามิเตอร์ ควบคุมของหุ่นยนต์อาจเป็นแมนิโฟลด์ไม่จำเป็นต้องให้เวลามีทิศทางเรียบ หรือแม้กระทั่งมีความหมายใดๆ คล้ายกับสัญชาตญาณของเวลาอันที่จริงแล้วสามารถสรุปได้เป็นวัตถุพีชคณิตทั่วไปได้อีกด้วย[ 26 ]
ระบบประเภทหนึ่งที่นิยามขึ้นจากตัวแปรอิสระหลายตัว เรียกว่าระบบหลายมิติระบบเหล่านี้มีประโยชน์สำหรับการสร้างแบบจำลอง และตัวอย่างเช่น ในการประมวลผลภาพ
โดยทั่วไปเวลาถือเป็นพารามิเตอร์ภายนอก เช่นใน กลศาสตร์ คลาสสิกและกลศาสตร์ควอนตัมและโดยทั่วไปเรียกว่าการแสดงในโดเมนเวลา และมักจะควบคู่ไปกับ การกำหนดสูตร กลศาสตร์แฮมิลโทเนียนนี่ไม่ใช่กรณีเสมอไป ตัวอย่างเช่นทฤษฎีสัมพัทธภาพทั่วไป เป็นอิสระจาก กรอบอ้างอิง[ 27 ]และแรงโน้มถ่วงก็มีอิทธิพลต่อเวลาเช่นกัน และใน ควอนตัมอิเล็กโทรไดนามิกส์การใช้ การกำหนดสูตร กลศาสตร์ลากรางจ์เป็นเรื่องปกติมากกว่า[ 28 ]ซึ่งเวลาและอวกาศอยู่ในระดับเดียวกัน ในทั้งสองกรณี วรรณกรรมยังคงพูดถึงระบบไดนามิก
ระบบพลวัตแบบไม่ต่อเนื่อง
เวลาอาจเป็นพารามิเตอร์แบบไม่ต่อเนื่องได้เช่นกัน เมื่อเวลาถูกทำให้เป็นแบบทั่วไปในกรณีหลายมิติ เช่น เป็นชุดทั่วไปของพารามิเตอร์ควบคุมหรือพารามิเตอร์ภายนอก พื้นที่นี้สามารถตีความได้ว่าเป็นแลตทิซเช่น จุดแบบไม่ต่อเนื่องของแมนิโฟลด์หรือติ๊กของราคาหุ้น [ 29 ] ดังนั้นเหตุการณ์เวลาแบบไม่ต่อเนื่องจึงสามารถนับได้ด้วยจำนวนเต็ม เช่น การวัดตำแหน่งของดาวเคราะห์บนท้องฟ้า แต่สิ่งนี้อาจแตกต่างอย่างมากจากสัญชาตญาณของเวลาในฐานะนาฬิกาที่มีเหตุการณ์เวลาที่เว้นระยะห่างเท่ากัน งานอย่างหนึ่งโดยทั่วไปคือการดึงแบบจำลองทางคณิตศาสตร์บางอย่างจากข้อมูล[ 30 ]
ไม่สามารถระบุได้อย่างแน่นอน

กฎวิวัฒนาการของระบบพลวัตคือฟังก์ชันที่อธิบายว่าสถานะในอนาคตใดเกิดขึ้นจากสถานะปัจจุบัน บ่อยครั้งที่ฟังก์ชันนั้นเป็นแบบกำหนดได้กล่าวคือ สำหรับช่วงเวลาที่กำหนด จะมีสถานะในอนาคตเพียงสถานะเดียวเท่านั้นที่เกิดขึ้นจากสถานะปัจจุบัน[ 31 ] [ 32 ]อย่างไรก็ตาม บางระบบไม่ใช่แบบกำหนดได้อาจอนุญาตให้มีสถานะในอนาคตได้หลายสถานะ (กล่าวคือ แผนที่ถูกทำให้เป็นแบบทั่วไปในฟังก์ชันหลายค่าและไม่ได้กำหนดไว้อย่างเฉพาะเจาะจงทุกที่) และระบบอาจเกิดการแยกสาขาได้
สุ่ม
บางระบบยังเป็นแบบสุ่มไม่ว่าจะเป็นในพารามิเตอร์อินพุต เช่นออสซิลเลเตอร์ที่มีแรงสุ่มหรือในเงื่อนไขเริ่มต้น หรือในตัวแปรที่คาดการณ์ไว้ เช่น ในสมการเชิงอนุพันธ์แบบสุ่มเนื่องจากเหตุการณ์สุ่มยังส่งผลต่อวิวัฒนาการของตัวแปรสถานะ และรวมถึงกระบวนการกระโดด แบบสุ่ม ซึ่งไม่ต่อเนื่อง ตัวอย่างต้นแบบของระบบพลวัตแบบสุ่มคือราคาหุ้น[ 33 ]
ระบบอลวนและระบบควอนตัม

สุดท้ายนี้ยังมีระบบอลวน (กล่าวคือ โดยทั่วไปเป็นระบบที่กำหนดได้ แต่ไม่สามารถคาดเดาได้) เช่น:
- พลวัตที่ซับซ้อน
- พลศาสตร์ไฮเปอร์โบลิก
- ความโกลาหลแบบทวีคูณ[ 34 ] [ 35 ] [ 36 ] [ 37 ]
- ความโกลาหลที่ไม่แน่นอน[ 38 ] [ 39 ]
และ ระบบควอนตัม (เช่น กำหนดได้จนกว่าจะมีการวัด) หรือ ระบบควอนตัมโกลาหล[ 1 ]
คำจำกัดความอย่างเป็นทางการ
สมมติว่า X เป็นเซตที่ไม่ว่างเปล่า โดยมีสมาชิกเรียกว่าสถานะ และสมมติว่ามีการแปลงทั่วไปดังนี้:

สามารถตีความ X เป็นปริภูมิสถานะและ T เป็นวิวัฒนาการระหว่างสถานะได้[ 40 ]การเพิ่มโครงสร้างที่แตกต่างกันบน T และบน X ช่วยให้สามารถจำลองคุณสมบัติที่แตกต่างกันของระบบไดนามิกได้
เป็นไปได้ที่จะสร้างแบบจำลองวิวัฒนาการของเวลา: โดยอาจเป็นเซมิกรุปที่มีพารามิเตอร์หนึ่งตัว เรียกว่าเวลาซึ่งจะอยู่ในเซมิกรุปเช่นกัน เช่นในกรณีเวลาไม่ต่อเนื่อง และในกรณีเวลาต่อเนื่อง




โครงสร้างเซมิกรุปนำเสนอการเชื่อมโยง ซึ่งหมายถึงกฎการประกอบระหว่างวิวัฒนาการเวลาที่แตกต่างกัน: [ 41 ] ซึ่งในที่สุดก็เป็นโฮโมมอร์ฟิซึมเช่น กัน


เป็นไปได้ที่จะกำหนดจุดกำเนิดของเวลาโดยการเพิ่มเอกลักษณ์ให้กับเซมิกรุป และในที่สุดก็เป็นไปได้ที่จะสร้างแบบจำลองวิวัฒนาการของเวลาที่ย้อนกลับได้: T สามารถเป็นกลุ่มเช่นหรือและเนื่องจากเป็นกลุ่มจึงมีคำจำกัดความของการแปลงผกผัน: [ 42 ]





โดยทั่วไปแล้ว ระบบพลวัตจะมีนิยามอยู่หลายประเภท: ประเภทแรกได้รับแรงบันดาลใจจากสมการเชิงอนุพันธ์สามัญและมีลักษณะทางเรขาคณิต โดยมี โครงสร้าง ความสามารถในการหาอนุพันธ์ เพิ่มเติม ประเภทที่สองได้รับแรงบันดาลใจจากทฤษฎีเออร์โกดิกและมี ลักษณะ ทางทฤษฎีการวัดโดยมี โครงสร้าง ทางโทโพโลยี เพิ่มเติม และประเภทสุดท้ายได้รับแรงบันดาลใจจากทฤษฎีหมวดหมู่และมีลักษณะที่ เป็นนามธรรม มากกว่า
นิยามทางเรขาคณิต

ในนิยามทางเรขาคณิต ระบบไดนามิกคือทูเปิลคือโดเมนสำหรับเวลา – มีตัวเลือกมากมาย โดยปกติจะเป็นจำนวนจริงหรือจำนวนเต็ม ซึ่งอาจจำกัดให้เป็นค่าที่ไม่เป็นลบคือแมนิโฟลด์และโดยทั่วไป แต่ไม่เสมอไปfคือกฎวิวัฒนาการt → f t (โดยที่) ซึ่งf tเป็นดิฟเฟโอโมฟิซึมของแมนิโฟลด์ไปยังตัวมันเอง[ 43 ]




โดยทั่วไปแล้วจะมีโครงสร้างเสริมบางอย่างอยู่บนท่อร่วมไอดี:
- เพื่อให้เป็นปริภูมิบานาค ในระดับท้องถิ่น จึงทำให้สามารถใช้เทคนิคมาตรฐานของการวิเคราะห์เชิงฟังก์ชันได้
- โครงสร้าง เชิงซิมเพล็กติกซึ่งเป็นกรณีทั่วไปของปริภูมิเฟส
- ปริภูมิยูคลิด เช่น ปริภูมิการกำหนดค่า อันเนื่องมาจากข้อจำกัดแบบโฮโลโนมิก
- โครงสร้างแบบไม่ต่อเนื่องเช่นกราฟ
- ชุดของการแปลงแบบดิฟเฟอเรนเชียลเช่นการแปลงพิกัด
- เมตริกเทนเซอร์เช่นเดียวกับในแมนิโฟลด์รีมันน์
ระบบพลวัตจริง
ระบบไดนามิกจริงระบบไดนามิกแบบเรียลไทม์ระบบไดนามิกแบบต่อเนื่องหรือการไหลคือทูเปิล ( T , M , Φ) โดยที่Tเป็นช่วงเปิดในจำนวนจริงR , Mเป็นแมนิโฟลด์ที่โดยทั่วไปแต่ไม่จำเป็นต้องเป็นโฮโมมอร์ฟิก เฉพาะที่ กับปริภูมิบานาคและ Φ เป็นฟังก์ชันต่อเนื่อง[ 44 ]
การที่โฮโมมอร์ฟิกในระดับท้องถิ่นกับปริภูมิบานาคทำให้สามารถใช้ทฤษฎีบทของการมีอยู่และความเป็นเอกลักษณ์ของคำตอบสำหรับสมการเชิงอนุพันธ์[ 45 ]และตัวดำเนินการเชิงเส้น[ 46 ]ได้ และสิ่งนี้ทำให้คล้ายคลึงกับคำจำกัดความแบบคลาสสิกที่อิงตามระบบสมการเชิงอนุพันธ์
ความสามารถในการหาอนุพันธ์
ถ้า Φ สามารถหาอนุพันธ์ได้อย่างต่อเนื่องระบบจะเรียกว่าระบบไดนามิกที่หาอนุพันธ์ได้ ดังนั้น ฟังก์ชันfจึงเป็นการแมปแบบ "เรียบ" ของโดเมนเวลาไปยังพื้นที่ของการแปลงแบบดิฟเฟอเรนเชียลของแมนิโฟลด์ไปยังตัวมันเอง กล่าวอีกนัยหนึ่งf ( t ) คือการแปลงแบบดิฟเฟอเรนเชียลสำหรับทุกเวลาtในโดเมน แมนิโฟลด์M โดยทั่วไปแล้วจะเป็นการแปลงแบบดิ ฟเฟอเรนเชียลเฉพาะที่กับพื้นที่ Banach [ 47 ]
มิติ
ถ้าแมนิโฟลด์Mมีลักษณะเป็นดิฟเฟโอเมอร์ฟิกเฉพาะที่กับR nระบบไดนามิกจะมีมิติจำกัดถ้าไม่เช่นนั้น ระบบไดนามิกจะมีมิติอนันต์[ 48 ]

การไหล
เมื่อ กำหนดให้ Tเป็นจำนวนจริง ระบบพลวัตจะเรียกว่าระบบทั่วโลกหรือโฟลว์และถ้าจำกัดT ให้เป็นจำนวนจริงที่ไม่เป็นลบ ระบบพลวัตนั้นจะเรียกว่า เซมิโฟลว์
นิยามแบบดั้งเดิม
นิยามทางเรขาคณิตสมัยใหม่ตั้งอยู่บนสมมติฐานของแผนที่ที่ให้คำอธิบายที่ชัดเจนของระบบพลวัต ซึ่งได้รับแรงบันดาลใจจากทฤษฎีเออร์โก ดิก สมการเชิงอนุพันธ์ย่อยและเทคนิคทางคณิตศาสตร์ที่เหนือกว่าสมการเชิงอนุพันธ์ อย่างไรก็ตาม คำอธิบายที่ชัดเจนมักไม่สามารถทำได้ นิยามทางเรขาคณิตแบบคลาสสิกจึงเป็นแบบแฝง มีรากฐานมาจากกลศาสตร์คลาสสิก และอิงตามชุดสมการเชิงอนุพันธ์สามัญ มาตรฐาน และชุดตัวแปรอิสระที่ มีจำนวนจำกัด



นิยามนี้บ่งชี้ถึงการมีอยู่และความเป็นเอกลักษณ์ของคำตอบของสมการดังกล่าว
ระบบพลวัตแบบลากรางจ์

นอกจากนี้ยังสามารถกำหนดนิยามทางเรขาคณิตโดยใช้หลักการแปรผันได้ อีกด้วย :





ระบบพลวัตแฮมิลโทเนียน
นอกเหนือจาก Lagrangian แล้ว ยังสามารถใช้ สูตร Hamiltonianซึ่งรวมถึง โครงสร้าง SymplecticหรือPoisson manifoldบนพื้นที่เฟสได้อีก ด้วย [ 52 ]
ระบบที่ไม่สามารถบูรณาการได้
เพื่อให้ครบถ้วนสมบูรณ์ ยังมีระบบที่ไม่ใช่ระบบที่สามารถหาปริพันธ์ได้ โดยทั่วไป เช่นระบบที่สูญเสียพลังงาน ระบบที่ไม่เป็นไปตาม ข้อจำกัดทางกลศาสตร์ และระบบที่มี โครงสร้าง แมนิโฟลด์สัมผัสตัวอย่างเช่น ระบบที่มีเงื่อนไขขอบเขตแบบไม่มีการลื่นไถล (กล่าวคือ มีข้อจำกัดบางอย่างเกี่ยวกับความเร็วที่ขอบเขต)
ระบบพลวัตเชิงพีชคณิต
ระบบประเภทสำคัญจากมุมมองทางคณิตศาสตร์คือเมื่อแผนที่เป็นพีชคณิตหรือโดยทั่วไปเมื่อแผนที่ถูกกำหนดโดยปริยายด้วยชุดสมการพีชคณิตและแมนิโฟลด์ถูกกำหนดในอุดมคติบนฟิลด์ทั่วไป[ 53 ]

ระบบพลวัตแบบไม่ต่อเนื่อง
ระบบไดนามิกแบบเวลาไม่ต่อเนื่องคือทูเปิล ( T , M , Φ) โดยที่Mเป็นแมนิโฟลด์ที่มีลักษณะดิฟเฟโอเมอร์ฟิกเฉพาะที่กับปริภูมิบานาคและ Φ เป็นฟังก์ชันTสามารถเลือกให้เป็นจำนวนเต็มหรือจำนวนเต็มที่ไม่เป็นลบได้ แมนิโฟลด์เองอาจเป็นกราฟหรือทำให้เป็นแบบไม่ต่อเนื่อง เช่น ด้วย โทโพโล ยีแบบไม่ต่อเนื่อง[ 54 ]
วัดนิยามเชิงทฤษฎี

ระบบพลวัตอาจถูกนิยามอย่างเป็นทางการเป็นสามสิ่ง ( T , , Φ) โดยที่ Φ เป็นการแปลงที่รักษาการวัดของปริภูมิการวัดและ Φ ยังเป็นการกระทำของเซมิกรุป T ในกรณีทั่วไปอีกด้วย ในที่นี้ปริภูมิการวัดถูกนิยามโดยสามสิ่ง ( X , Σ, μ ) โดยที่Xเป็นเซต Σ เป็นซิกมาแอลจีบรา บนXและ μ เป็นการวัด แบบจำกัด บนปริภูมิที่วัดได้ ( X , Σ) บ่อยครั้งที่เป็นปริภูมิความน่าจะเป็น กล่าวคือปริภูมิการวัด ที่การวัดทั้งหมดของปริภูมิทั้งหมดเป็น 1 กล่าวอีกนัยหนึ่งคือ มีการวัด ความ น่าจะเป็นแบบจำกัดและปกติ[ 55 ] [ 56 ]

กล่าวได้ว่าฟังก์ชัน Φ: X → X สามารถวัดได้ด้วย Σก็ต่อเมื่อ สำหรับทุก σ ใน Σ จะมีฟังก์ชัน Φ จะรักษาการวัดได้ก็ต่อเมื่อ สำหรับทุกσใน Σ จะมีเมื่อรวมคุณสมบัติข้างต้นเข้าด้วยกัน ฟังก์ชัน Φ จะเรียกว่าเป็นการแปลงที่รักษาการวัดของXถ้ามันเป็นฟังก์ชันจากXไปยังตัวมันเอง สามารถวัดได้ด้วย Σ และรักษาการวัดได้


สามสิ่ง ( T , , Φ) โดยมี ( X , Σ, μ ) สำหรับ Φ ดังกล่าว จะถูกกำหนดให้เป็นระบบไดนามิกที่รักษาการวัด [ 57 ] [ 58 ]

อนุสัญญา
มีหลักเกณฑ์สองข้อสำหรับการกำหนดความหมายของแผนที่:
- ฟิสิกส์และข้อตกลงเวลาต่อเนื่อง: แผนที่ Φ แสดงถึงวิวัฒนาการเวลาของระบบไดนามิก สามารถตีความได้สำหรับวิวัฒนาการเวลาแบบไม่ต่อเนื่องเป็น Φ= ที่กำหนดพารามิเตอร์โดยหรือสำหรับวิวัฒนาการเวลาต่อเนื่องเป็น Φ= โดยที่ในกรณีทั่วไป แผนที่แต่ละอันจะแตกต่างกัน สมมติเวลาเริ่มต้นและเวกเตอร์สถานะแผนที่สามารถมองได้ว่าเป็นแผนที่การแปลเวลา[ 59 ] ในกรณีไม่ต่อเนื่อง หมายความว่าแผนที่ทั้งหมดสามารถมองได้ว่าเป็นการประกอบกันของแผนที่แต่ละอัน[ 60 ]ข้อตกลงนี้ยังเกี่ยวข้องกับการศึกษาจุดลิมิตและลำดับโคชีด้วย
- คณิตศาสตร์และข้อตกลงแบบไม่ต่อเนื่อง: แผนที่ทั้งหมดถูกกำหนดให้เป็นการเปลี่ยนแปลงสถานะจากช่วงเวลาหนึ่งไปยังช่วงเวลาถัดไป กล่าวคือจากหรือในกรณีต่อเนื่องจากแผนที่เหล่านี้เป็นแผนที่เดียวกันสำหรับทุกช่วงเวลาซึ่งสามารถตีความได้ว่าเป็นการวนซ้ำบนแผนที่ข้อตกลงนี้ยังเกี่ยวข้องกับการศึกษาจุดตรึงและการเรียกซ้ำด้วย






![{\displaystyle {\vec {\mathbb {x} }}(t+t_{0})={\hat {\Phi }}(t)[{\vec {\mathbb {x} }}(t_{0})]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ff87467f5df80e8c741120b9c8c9632f45cdb6a9)







ในภาษาของทฤษฎีการแทน : วิวัฒนาการของเวลาในปริภูมิสถานะ X คือการแทนแบบเหนี่ยวนำของการแปลเวลาในเซมิกรุป T และแผนที่ Φ คือการกระทำของกลุ่มที่เหนี่ยวนำการแทนบน X [ 61 ]กล่าวคือมีโฮโมมอร์ฟิซึมระหว่างกลุ่มเวลา T และปริภูมิสถานะ X โดยที่ในภาษาของกลศาสตร์ควอนตัมตัว สร้างอนันต์เล็กของการแปลเวลาคืออนุพันธ์ในเวลาและยังเป็นตัวดำเนินการวิวัฒนาการของเวลาอีกด้วย[ 62 ]


ตัวอย่าง
ความสัมพันธ์กับนิยามทางเรขาคณิต
นิยามเชิงทฤษฎีของการวัดนั้นถือว่ามีการแปลงที่รักษาการวัดไว้ ในศัพท์ทางฟิสิกส์ การวัดคือฟังก์ชันความหนาแน่นของความน่าจะเป็นเหนือปริภูมิเฟสสัญชาตญาณมาจากระบบแฮมิลโทเนียนซึ่ง รักษา ปริมาตรไว้ ข้อเท็จจริงที่ว่าพลังงานเป็นปริพันธ์ของการเคลื่อนที่ทำให้เกิดการอนุรักษ์ปริมาตรในปริภูมิเฟส หรือการไหล ที่ไม่สามารถอัดได้ [ 64 ]ปริพันธ์ของการเคลื่อนที่เพิ่มเติมทำให้เกิดการแบ่งย่อยเพิ่มเติมในปริภูมิเฟส สัญชาตญาณอีกอย่างหนึ่งมาจากการเรียงสับเปลี่ยนซึ่ง "ไม่สามารถอัดได้" เราสามารถตีความเซตของการเรียงสับเปลี่ยน ที่เป็นไปได้ทั้งหมด ของเซต[ 65 ]ว่าเป็นกลุ่มออโตมอร์ฟิ ซึม ที่ เกิดจากการอนุรักษ์จำนวนองค์ประกอบของเซต[ 66 ] [ 67 ]
มาตรการคงที่ที่แตกต่างกันหลายอย่างสามารถเชื่อมโยงกับกฎวิวัฒนาการหนึ่งข้อได้ ในลักษณะเดียวกับที่ความหนาแน่นของความน่าจะเป็นหลายค่าสามารถเหนี่ยวนำให้เกิดสถานะมหภาค เดียวกัน ได้ หากระบบพลวัตถูกกำหนดโดยระบบสมการเชิงอนุพันธ์ มาตรการที่เหมาะสมจะต้องถูกกำหนด ความสมมาตรไม่ได้ชัดเจน และอาจไม่สามารถกำหนดมาตรการความน่าจะเป็นได้ในบางกรณีที่ผิดปกติ สิ่งนี้ทำให้การพัฒนาทฤษฎีเออร์โกดิกโดยเริ่มจากสมการเชิงอนุพันธ์เป็นเรื่องยาก ดังนั้นจึงสะดวกที่จะมีคำจำกัดความที่ได้รับแรงบันดาลใจจากระบบพลวัตภายในทฤษฎีเออร์โกดิกที่หลีกเลี่ยงการเลือกมาตรการ[ 68 ]และถือว่าได้มีการเลือกแล้ว
โดยไม่เป็นทางการและโดยอาศัยการอนุมานจากมุมมองของทฤษฎีบทเออร์โกดิกค่าเฉลี่ยของเวลาจะเท่ากับค่าเฉลี่ยของพื้นที่ / ค่าเฉลี่ยของกลุ่มตัวอย่างในที่สุด[ 69 ]ค่าเฉลี่ยของเวลาจะเป็นค่าคงที่ของการเคลื่อนที่ซึ่งสอดคล้องกับสมมาตรเนื่องจากทฤษฎีบทโนเธอร์และในที่สุดสมมาตรจะสอดคล้องกับค่าเฉลี่ยของพื้นที่[ 70 ] [ 71 ] [ 72 ]
การสร้างแบบง่ายๆ (บางครั้งเรียกว่าทฤษฎีบท Krylov–Bogolyubov ) แสดงให้เห็นว่าสำหรับระบบจำนวนมาก สามารถสร้างการวัดเพื่อให้กฎวิวัฒนาการของระบบไดนามิกเป็นการแปลงที่รักษาการวัดได้เสมอ ในการ สร้าง การวัดที่กำหนดของปริภูมิสถานะจะถูกรวมเข้าด้วยกันสำหรับจุดในอนาคตทั้งหมดของวิถี ทำให้มั่นใจถึงความไม่แปรเปลี่ยน[ 73 ]
บางระบบมีมาตรวัดตามธรรมชาติ เช่นมาตรวัด Liouvilleในระบบแฮมิลโทเนียนซึ่งถูกเลือกเหนือมาตรวัดคงที่อื่นๆ เช่น มาตรวัดที่รองรับบนวงโคจรคาบของระบบแฮมิลโทเนียน สำหรับระบบที่วุ่นวายและมีการสูญเสียพลังงานการเลือกมาตรวัดคงที่นั้นมีความท้าทายทางเทคนิคมากกว่า มาตรวัดนั้นจำเป็นต้องรองรับบนตัวดึงดูดแต่ตัวดึงดูดมีมาตรวัด Lebesgue เป็นศูนย์ และมาตรวัดคงที่ต้องเป็นเอกลักษณ์[ 74 ]เมื่อเทียบกับมาตรวัด Lebesgueสำหรับระบบที่มีการสูญเสียพลังงาน โดยทั่วไปแล้ว พื้นที่เฟสขนาดเล็กจะหดตัวลงภายใต้การวิวัฒนาการของเวลา[ 75 ]สำหรับระบบที่วุ่นวายพื้นที่เฟสขนาดเล็กมักจะเติบโตและขยายออกไปอย่างน้อยจนถึงพื้นที่เฟสที่มีขอบเขตจำกัด
โดยทั่วไป แล้วการกระจายตัวแบบฮิวริสติกมีผลตรงกันข้ามกับความโกลาหลมันมีแนวโน้มที่จะลดทอนและจำกัดการเคลื่อนที่โดยทั่วไป แต่ยังลดทอนความปั่นป่วนและความโกลาหลด้วย การขยายไปยังบริเวณที่จำกัดของปริภูมิเฟสหมายถึงการไวต่อเงื่อนไขเริ่มต้นระบอบเออร์โกดิกมีแนวโน้มที่จะเติบโตและครอบคลุมบริเวณที่จำกัดของปริภูมิเฟส ทั้งหมด กล่าวคือมี วงโคจรคาบที่หนาแน่น และระบอบโกลาหลยังมีการส่งผ่านทางโทโพโลยี ด้วย [ 76 ]
สำหรับระบบพลวัตแบบไฮเปอร์โบลิกมาตรวัดไซนาย-รูเอล-โบเวนดูเหมือนจะเป็นตัวเลือกที่เหมาะสมที่สุด มาตรวัดเหล่านี้สร้างขึ้นบนโครงสร้างทางเรขาคณิตของแมนิโฟลด์เสถียรและไม่เสถียรของระบบพลวัต มีพฤติกรรมทางกายภาพภายใต้การรบกวนเล็กน้อย และสามารถอธิบายสถิติที่สังเกตได้มากมายของระบบไฮเปอร์โบลิก
ระบบพลวัตเชิงทอพอโลยี
ระบบไดนามิกเชิงโทโพโลยีคือระบบไดนามิก ( T , X , Φ) บน ปริภูมิโทโพโลยี X ที่มีขนาดกะทัดรัดเฉพาะที่และ/หรือ เฮาส์ดอร์ฟ [ 77 ] [ 78 ] [ 79 ] Tเป็นไอโซมอร์ฟิซึมเชิงโทโพโลยีและ ดังนั้นจึงเป็นโฮมีโอมอร์ฟิซึม[ 80 ]
พลศาสตร์เชิงทอพอโลยีมักทำจาก มุมมอง แบบองค์ รวม กล่าว คือ พิจารณาเงื่อนไขเริ่มต้นและผลลัพธ์ที่เป็นไปได้ทั้งหมด (เช่นจุดสมดุลวง โคจร คาบจุดดึงดูดหรือความโกลาหล ) สถิติและการจัดกลุ่มของวิถีโคจร พฤติกรรมระยะยาวของระบบ และโฮโมมอร์ฟิซึม (เช่น การเปลี่ยนแปลงรูปทรงอย่างต่อเนื่อง) ของวิถีโคจร โดยทั่วไปวิถีโคจรสามารถหาอนุพันธ์ได้และระบบก็เป็นการไหลด้วย
เทคนิคเหล่านี้มักมี ลักษณะ ทางทอพอโลยีและเสริมกับพลศาสตร์เชิงเออร์โกดิก สมมาตรและปริพันธ์ของการเคลื่อนที่ผ่านทฤษฎีบทของโนเธอร์ตัวอย่างเช่น หนึ่งในเป้าหมายของพลศาสตร์เชิงทอพอโลยีคือการจำแนกชั้นสมมูลเชิงทอพอโล ยี การจัดกลุ่มประเภทของการเคลื่อนที่โดยสัมพันธ์กับชั้นสมมูลของโฮมีโอเมอร์ฟิ ซึม หนึ่งในเป้าหมายของทฤษฎีเออร์โกดิกคือการแยกส่วนเชิงเออร์โกดิก หนึ่งในเป้าหมายของสมมาตร คือการจำแนก ชั้นสมมูลกลุ่มทั้งหมดของกลุ่มออโตมอร์ฟิซึมและ ระบบที่สามารถ หาปริพันธ์ได้คือระบบที่ สามารถหา ปริพันธ์ของการเคลื่อนที่ทั้งหมดได้และทราบค่าแล้ว
การอัดแน่น
การศึกษาการขยายต่อเนื่อง Φ* ของ Φ ไปสู่ การกระชับจุดเดียวX*ของXมักมีประโยชน์แม้หลังจากสูญเสียโครงสร้างเชิงอนุพันธ์ของระบบดั้งเดิมไปแล้ว ก็ยังมีข้อโต้แย้งเรื่องความกระชับเพื่อวิเคราะห์ระบบใหม่ ( R , X* , Φ*) ซึ่งคล้ายคลึงกับเรขาคณิตเชิงโปรเจคทีฟที่จุดลิมิตทั้งหมดไปยังอนันต์เป็นจุดเดียวกัน อีกเทคนิคหนึ่งที่ทั่วไปกว่าคือการใช้การกระชับ Stone–Čech [ 81 ] [ 82 ] [ 83 ] ซึ่งคล้ายคลึงกับเรขาคณิตเชิงเส้นตรงที่จุดลิมิตทั้งหมดที่อนันต์ถือว่าแตกต่างกัน
ความเกี่ยวข้อง
ในระบบพลวัตแบบกะทัดรัดเซตลิมิตของวงโคจรใดๆ จะต้องไม่ว่างเปล่ากะทัดรัดและ เชื่อมต่อ กัน อย่างง่าย
ยกตัวอย่างเช่น ในระบบพลวัตเชิงทอพอโลยี วงโคจรจำกัดของตัวดึงดูดจะอยู่ภายในแมนิโฟลด์เอง นี่เป็นข้อความที่ไม่ธรรมดาด้วยเหตุผลหลายประการ: วงโคจรจำกัดอาจไม่สามารถเข้าถึงได้เลย; วงโคจรจำกัดอาจมีค่าการวัดเลเบสเป็นศูนย์; การกำหนดความน่าจะเป็นให้กับวงโคจรจำกัดนั้นไม่ใช่เรื่องง่าย; ตัวดึงดูดอาจมีวงโคจรจำกัดหลายวง และความแตกต่างระหว่างการบีอัด แบบต่างๆ อาจมีความสำคัญ
นิยามด้วยทฤษฎีหมวดหมู่
หมวดหมู่เทียบกับกลุ่มย่อย
หมวดหมู่ X ของวัตถุทางคณิตศาสตร์มีเซมิกรุป G ของโฮโมมอร์ฟิซึมที่กระทำบนมัน (ปริภูมิเชิงทอพอโลยีมีแผนที่ต่อเนื่อง เซตมีแผนที่ตามอำเภอใจ กลุ่ม วงแหวน ฟิลด์ หรือพีชคณิตมีโฮโมมอร์ฟิซึม ปริภูมิการวัดมีแผนที่ที่วัดได้) เราสามารถมองแต่ละหมวดหมู่เหล่านี้เป็นระบบพลวัตได้ เราอาจรวมหมวดหมู่ของระบบพลวัตที่มีโฮโมมอร์ฟิซึมที่เหมาะสมเข้าไปด้วยก็ได้ แต่มุมมองนี้เองก็ไม่ได้มีประโยชน์มากนัก[ 84 ]
นิยามด้วยโมโนอิด
ในบริบทของทฤษฎีหมวดหมู่ หมวดหมู่จะถูกกำหนดร่วมกับแผนที่เอกลักษณ์เสมอ ดังนั้นคำจำกัดความเหล่านี้จึงอิงตามโมโนอิดแทนที่จะเป็นเซมิกรุป[ 85 ] [ 86 ]
ระบบไดนามิก[ 87 ] [ 88 ] [ 89 ] คือทูเปิล ( T , X , Φ) โดยที่Tเป็นโมโนอิดเขียนแบบบวก X เป็น เซตที่ไม่ว่างและ Φ เป็นฟังก์ชัน : โดยที่: (โดยที่ คือ แผนที่การฉายภาพลำดับที่ 2 ) และสำหรับx ใดๆ ในX : สำหรับและโดยที่เราได้กำหนดเซตสำหรับx ใด ๆ ในX








โดยเฉพาะ อย่าง ยิ่ง ในกรณีที่เรามีสำหรับทุกxในXที่และดังนั้น Φ จึงกำหนดการกระทำโมโนอิดของTบนX


ฟังก์ชัน Φ( t , x ) เรียกว่าฟังก์ชันวิวัฒนาการของระบบพลวัต: มันเชื่อมโยงจุด x ทุกจุดในเซต X กับภาพที่ไม่ซ้ำกัน โดยขึ้นอยู่กับตัวแปร t ซึ่งเรียกว่าพารามิเตอร์วิวัฒนาการ X เรียกว่าปริภูมิเฟสหรือปริภูมิสถานะในขณะที่ตัวแปรxแทนสถานะเริ่มต้นของระบบ
เรามักเขียนว่า: ถ้าเรากำหนดให้ตัวแปรตัวใดตัวหนึ่งเป็นค่าคงที่ ฟังก์ชันนั้น เรียกว่าการไหลผ่านxและกราฟ ของมัน เรียกว่าวิถีผ่านxเซตนั้น เรียกว่าวงโคจรผ่านxวงโคจรผ่านxคือภาพของการไหลผ่าน x




เซตย่อยSของปริภูมิสถานะXเรียกว่า Φ- invariantถ้าสำหรับทุกxในSและทุกtในT ดังนั้น โดยเฉพาะอย่างยิ่ง ถ้าSเป็น Φ- invariantสำหรับทุกxในSนั่นคือ การไหลผ่านxจะต้องถูกกำหนดไว้สำหรับทุกเวลาสำหรับทุกองค์ประกอบของ S

การสร้างระบบพลวัต
แนวคิดเรื่องวิวัฒนาการตามเวลาเป็นหัวใจสำคัญของทฤษฎีระบบพลวัต ดังที่ได้กล่าวไปแล้วในส่วนก่อนหน้า เหตุผลพื้นฐานสำหรับข้อเท็จจริงนี้คือ แรงจูงใจเริ่มต้นของทฤษฎีนี้มาจากการศึกษาพฤติกรรมตามเวลาของระบบกลไกแบบคลาสสิกแต่ระบบสมการเชิงอนุพันธ์สามัญจะต้องได้รับการแก้ไขก่อนจึงจะกลายเป็นระบบพลวัตได้ ตัวอย่างเช่น พิจารณาปัญหาค่าเริ่มต้นดังต่อไปนี้: โดยที่


- แสดงถึงความเร็วของจุดวัสดุx
- Mคือแมนิโฟลด์ที่มีมิติจำกัด
- v : T × M → TMคือสนามเวกเตอร์ในR nหรือC nและแสดงถึงการเปลี่ยนแปลงของความเร็วที่เกิดจากแรง ที่ทราบค่า ซึ่งกระทำต่อจุดวัสดุที่กำหนดในปริภูมิเฟสMการเปลี่ยนแปลงนี้ไม่ใช่เวกเตอร์ในปริภูมิเฟส Mแต่เป็นเวกเตอร์ในปริภูมิสัมผัสTMแทน

ไม่จำเป็นต้องใช้ค่าอนุพันธ์อันดับสูงกว่าในสมการ หรือพารามิเตอร์tในv ( t , x ) เพราะสามารถกำจัดสิ่งเหล่านี้ได้โดยการพิจารณาระบบที่มีมิติสูงกว่า
ขึ้นอยู่กับคุณสมบัติของสนามเวกเตอร์นี้ ระบบเชิงกลจะถูกเรียกว่าอะไร
- เป็นอิสระเมื่อv ( t , x ) = v ( x )
- เป็นเนื้อเดียวกันเมื่อv ( t , 0 ) = 0 สำหรับทุกt
สามารถหาคำตอบได้โดยใช้เทคนิค ODE มาตรฐาน และแสดงด้วยฟังก์ชันวิวัฒนาการที่ได้กล่าวถึงไปแล้วข้างต้น

ระบบพลวัตจึงเป็น ( T , M , Φ)
การจัดการเชิงรูปแบบบางอย่างของระบบสมการเชิงอนุพันธ์ที่แสดงไว้ข้างต้นจะทำให้ได้รูปแบบสมการทั่วไปมากขึ้นที่ระบบพลวัตต้องเป็นไปตามเงื่อนไข โดยที่เป็นฟังก์ชันจากเซตของฟังก์ชันวิวัฒนาการไปยังฟิลด์ของจำนวนเชิงซ้อน


สมการนี้มีประโยชน์เมื่อใช้ในการสร้างแบบจำลองระบบเชิงกลที่มีข้อจำกัดที่ซับซ้อน
แนวคิดหลายอย่างในระบบพลวัตสามารถขยายไปสู่แมนิโฟลด์มิติอนันต์ได้ ซึ่งก็คือแมนิโฟลด์ที่เป็นปริภูมิบานาคเฉพาะที่ใน กรณีนั้นสมการเชิงอนุพันธ์จะเป็นสมการเชิงอนุพันธ์ย่อย
ระบบพลวัตแบบไม่ต่อเนื่อง

ระบบพลวัตแบบไม่ต่อเนื่อง คือระบบที่เวลาหรือพื้นที่ หรือทั้งสองอย่างเป็นแบบไม่ต่อเนื่อง โดยทั่วไปแล้ว ทั้งพื้นที่และเวลาจะมี เซตของจุด ที่มีจำนวนจำกัดหรือนับได้และแผนที่และตัวดำเนินการที่มีขอบเขต ซึ่งสามารถจัดการได้บนคอมพิวเตอร์ โดยอาศัยข้อสมมติทั่วไปบางประการเกี่ยวกับ ขอบเขต
นิยามทางคณิตศาสตร์
ในบริบททั่วไปของคณิตศาสตร์เป็นไปได้ที่จะกำหนดระบบไดนามิกเป็นแผนที่แบบไม่ต่อเนื่องทั่วไป[ 90 ]ดังเช่นในคำจำกัดความอย่างเป็นทางการลำดับทั่วไปเป็นระบบไดนามิกแบบไม่ต่อเนื่องอยู่แล้ว[ 91 ] : ตัวอย่างที่ 1 การเรียกซ้ำและการวนซ้ำของแผนที่ก็เป็นอีกกรณีหนึ่งเช่นกัน[ 91 ] : ตัวอย่างที่ 2 และ 3 ต้นแบบของสิ่งนี้คือแผนที่โลจิสติก [ 91 ] :ตัวอย่างที่ 4
นิยามเชิงประจักษ์
จากมุมมองเชิงประจักษ์ ระบบไดนามิกทั้งหมดที่ได้มาจากข้อมูลเชิงเวลาเป็นแบบไม่ต่อเนื่อง ตัวอย่างเช่น เกาส์พิสูจน์แล้วว่าด้วยการวัดตำแหน่งและเวลา 3 ครั้งของเซเรสบนท้องฟ้า ก็สามารถกำหนดวงโคจรได้อย่างสมบูรณ์ ดังนั้นจึงสามารถคำนวณตำแหน่งและความเร็วที่เป็นไปได้ของดาวเคราะห์น้อยในอดีตหรืออนาคตได้ และด้วยเหตุนี้จึงสามารถกำหนดลักษณะของระบบไดนามิกได้อย่างสมบูรณ์[ 92 ]งานทั่วไปของการใช้ข้อมูลเชิงทดลองคือการสร้างแบบจำลองทางคณิตศาสตร์[ 93 ]
ตัวอย่าง
![กระต่ายฟิโบนาชชี: แบบจำลองประชากรที่มีทรัพยากรไม่จำกัดที่สร้างตัวเลขฟิโบนาชชี[94]](//upload.wikimedia.org/wikipedia/commons/thumb/a/af/Fibonacci_Rabbits.svg/330px-Fibonacci_Rabbits.svg.png)
 แผนที่โลจิสติกส์ คือแผนที่ทั่วไปที่นำมาใช้กับตัวเองซ้ำๆ ทำให้เกิดระบบพลวัต
แผนที่โลจิสติกส์ คือแผนที่ทั่วไปที่นำมาใช้กับตัวเองซ้ำๆ ทำให้เกิดระบบพลวัต![ตัวอย่างแยกย่อยของแบบจำลองผู้ล่าและเหยื่อ[95]](//upload.wikimedia.org/wikipedia/commons/thumb/7/71/Predator-prey_toy_model.gif/250px-Predator-prey_toy_model.gif) ตัวอย่างแยกย่อยของแบบจำลองผู้ล่าและเหยื่อ[ 95 ]
ตัวอย่างแยกย่อยของแบบจำลองผู้ล่าและเหยื่อ[ 95 ]![PageRank เป็นตัวอย่างของระบบไดนามิกแบบไม่ต่อเนื่องที่ทำนายความน่าจะเป็นในอนาคตที่ผู้ใช้จะเข้าชมหน้าเว็บ [96]](//upload.wikimedia.org/wikipedia/commons/thumb/5/55/Page_rank_animation.gif/500px-Page_rank_animation.gif)
![กระต่ายฟิโบนาชชี: แบบจำลองประชากรที่มีทรัพยากรไม่จำกัดที่สร้างตัวเลขฟิโบนาชชี[94]](https://upload.wikimedia.org/wikipedia/commons/thumb/a/af/Fibonacci_Rabbits.svg/330px-Fibonacci_Rabbits.svg.png)

![ตัวอย่างแยกย่อยของแบบจำลองผู้ล่าและเหยื่อ[95]](https://upload.wikimedia.org/wikipedia/commons/thumb/7/71/Predator-prey_toy_model.gif/250px-Predator-prey_toy_model.gif)
คณิตศาสตร์ประยุกต์และฟิสิกส์

ในบริบทของคณิตศาสตร์ประยุกต์เช่นฟิสิกส์ชีววิทยาหรือวิศวกรรมจุดเริ่มต้นมักจะเป็นสมการผลต่างจำกัด[ 97 ]เช่นสมการที่ง่ายที่สุดเท่าที่จะเป็นไปได้ดังนี้ :

โดยทั่วไปแล้ว สามารถสรุปเป็นแผนที่แบบไม่ต่อเนื่องทั่วไปจากแมนิโฟลด์n มิติ ไปยังตัวมันเองได้:

ในบริบทของการไหลแบบแฮมิลโทเนียน [ 98 ] การเคลื่อนที่นั้นสามารถถือได้ว่าเป็นการแปลงแบบแคนอนิก (กล่าวคือ ในที่สุดแล้วเป็นแผนที่ ) และด้วยเหตุนี้ ชุดที่ไม่ต่อเนื่องของสิ่งเหล่านี้ในช่วงเวลาที่ไม่ต่อเนื่องจึงเป็นรูปร่างของลักษณะเฉพาะของระบบไดนามิกที่ไม่ต่อเนื่องทั้งหมดอีกครั้ง

นอกจาก นี้ยังมีกรณีของวงโคจรหนาแน่น[ 99 ]ซึ่งโดยพื้นฐานแล้วพื้นที่เฟสของสถานะไม่กระชับและตัวดำเนินการที่ไม่จำกัดเช่นในกลศาสตร์ควอนตัม ซึ่ง แผนที่วิวัฒนาการไม่กระชับ
ตัวอย่างหนึ่งคือการพยากรณ์อากาศของโลก ซึ่งจุดข้อมูลอยู่ห่างกันในเชิงพื้นที่ ระบบสามารถวางบนโครงข่ายและสามารถใช้สูตรในการคำนวณและทำนายตัวแปรบางอย่างได้ เช่น ในกรณีของการแปลงสมการนาเวียร์-สโตกส์ให้เป็นแบบไม่ต่อเนื่อง
น้ำตก

ระบบไดนามิกแบบไม่ต่อเนื่องมักเรียกว่าแคสเคด เมื่อแนวคิดของการส่งต่อข้อมูลจากขั้นตอนหนึ่งไปยังอีกขั้นตอนหนึ่งมีความสำคัญ ตัวอย่างทั่วไปคือ avalanches [ 100 ] [ 101 ]และแคสเคดแบบเพิ่มคาบเป็นสองเท่า[ 102 ] เมื่อTถูกกำหนดให้เป็นจำนวนเต็ม ระบบนั้นเรียกว่าแคสเคดหรือแผนที่หากTถูกจำกัดให้เป็นจำนวนเต็มที่ไม่เป็นลบ ระบบนั้นเรียกว่าเซมิแคสเคด[ 103 ]
ออโตมาตาเซลลูลาร์
ออโตมาตาเซลลูลาร์คือทูเปิล ( T , M , Φ) โดยที่T คือ แลตทิซเช่นจำนวนเต็มหรือตารางจำนวนเต็มมิติสูงกว่าMคือเซตของฟังก์ชันจากแลตทิซจำนวนเต็ม (อีกครั้ง มีหนึ่งมิติหรือมากกว่า) ไปยังเซตจำกัด และ Φ คือฟังก์ชันวิวัฒนาการ (ที่กำหนดในระดับท้องถิ่น) ดังนั้นออโตมาตาเซลลูลาร์ จึง เป็นระบบพลวัต แลตทิซในMแทนแลตทิซ "พื้นที่" ในขณะที่แลตทิซในTแทนแลตทิซ "เวลา"
ตัวอย่างอื่นๆ ที่น่าสนใจ
- พลวัตเชิงสัญลักษณ์
- ออโตมาตาสถานะจำกัด
- เครื่องจักรทัวริง
- พลศาสตร์เชิงเลขคณิต
- ระบบพลวัตกราฟ
- ด้วยลักษณะที่เป็นแบบไม่ต่อเนื่องทฤษฎีกราฟ และ คณิตศาสตร์แบบไม่ต่อเนื่องทุกรูปแบบโดยทั่วไปสามารถมองได้ในมุมมองของระบบพลวัตแบบไม่ต่อเนื่อง
- หลักการเดียวกันนี้ใช้ได้กับคณิตศาสตร์จำกัดทุก รูปแบบ เรขาคณิตจำกัดกลุ่มจำกัดหรือ โครงสร้างทางคณิตศาสตร์ ที่นับได้เช่นกลุ่มค็อกเซเตอร์
บางสาขาเหล่านี้เป็นสาขาย่อยที่แยกต่างหาก เช่นทฤษฎีจำนวนหรือทฤษฎีเครือข่าย
ระบบพลวัตเชิงเส้น
ระบบพลวัตเชิงเส้นเป็นหัวใจสำคัญของหลักสูตรวิศวกรรมระบบและทฤษฎีระบบ ทุกหลักสูตร ในอดีต ระบบเชิงเส้นสะท้อนให้เห็นถึง ทฤษฎีระบบส่วนใหญ่จนถึงทศวรรษ 1970 (กล่าวคือ ก่อนที่คอมพิวเตอร์จะแพร่หลาย) ระบบเหล่านี้มีคุณสมบัติพื้นฐานของระบบพลวัตใดๆ เช่นการลดทอนการอิ่มตัว และการสั่นและอย่างน้อยในระดับท้องถิ่นก็สามารถใช้ประมาณระบบที่ไม่เป็นเชิงเส้นได้ด้วย
ระบบพลวัตเชิงเส้นสามารถแก้ไขได้โดยใช้ฟังก์ชันง่ายๆ เช่น ฟังก์ชันเลขชี้กำลังและฟังก์ชันตรีโกณมิติอย่างง่าย (เช่น เลขชี้กำลังเชิงซ้อน) และสามารถจำแนกพฤติกรรมของวงโคจรทั้งหมดได้
ในระบบเชิงเส้น ปริภูมิเฟสคือ ปริภูมิยูคลิด Nมิติ ดังนั้นจุดใดๆ ในปริภูมิเฟสสามารถแทนด้วยเวกเตอร์ที่มี ตัวเลข Nตัว ระบบพลวัตเชิงเส้น N มิติจึงไม่อลวน เช่นกัน
การวิเคราะห์ระบบเชิงเส้นก็ง่ายขึ้นและเป็นไปได้เช่นกัน เพราะระบบเหล่านี้เป็นไปตามหลักการซ้อนทับ (superposition principle ) กล่าว คือ ถ้าu ( t ) และw ( t ) สอดคล้องกับสมการเชิงอนุพันธ์เชิงเส้นที่อธิบายระบบแล้ว การรวมเชิงเส้นก็จะสอดคล้องกับสมการเชิงอนุพันธ์เชิงเส้นนั้นด้วยเช่นกันด้วยหลักการซ้อนทับนี้เราสามารถสร้างคำตอบใหม่จากคำตอบที่ทราบแล้วได้ ดังนั้นจึงจำเป็นต้องจำแนกประเภทของคำตอบพื้นฐานเพื่อที่จะทราบคำตอบทั้งหมด

การไหล
สำหรับการไหลเวกเตอร์ฟิลด์ v( x ) คือ ฟังก์ชัน เชิงเส้นของตำแหน่งในปริภูมิเฟส กล่าวคือ โดยที่Aเป็นเมทริกซ์bเป็นเวกเตอร์ของตัวเลข และxเป็นเวกเตอร์ตำแหน่ง คำตอบของระบบสมการนี้สามารถหาได้โดยใช้หลักการซ้อนทับ (ความเป็นเชิงเส้น) กรณีb ≠ 0 โดยที่A = 0 จะได้เป็นเส้นตรงในทิศทางของ b :


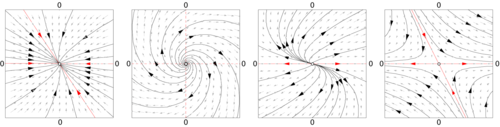
เมื่อbเป็นศูนย์และA ≠ 0 จุดกำเนิดจะเป็นจุดสมดุล (หรือจุดเอกฐาน) ของการไหล นั่นคือ ถ้าx 0 = 0 วงโคจรจะยังคงอยู่ที่นั่น สำหรับเงื่อนไขเริ่มต้นอื่นๆ สมการการเคลื่อนที่กำหนดโดยเลขชี้กำลังของเมทริกซ์ : สำหรับจุดเริ่มต้นx 0 ,

เมื่อb = 0 ค่าไอเกนของ เมทริกซ์ Aจะกำหนดโครงสร้างของปริภูมิเฟส จากค่าไอเกนและเวกเตอร์ไอเกนของ เมทริกซ์ Aเราสามารถระบุได้ว่าจุดเริ่มต้นจะลู่เข้าหรือลู่ออกไปยังจุดสมดุลที่จุดกำเนิดหรือไม่
ระยะห่างระหว่างเงื่อนไขเริ่มต้นสองเงื่อนไขที่แตกต่างกันในกรณีที่A ≠ 0 จะเปลี่ยนแปลงแบบเลขชี้กำลังในกรณีส่วนใหญ่ โดยอาจลู่เข้าสู่จุดหนึ่งอย่างรวดเร็วแบบเลขชี้กำลัง หรือลู่แยกออกจากกันอย่างรวดเร็วแบบเลขชี้กำลัง ระบบเชิงเส้นแสดงให้เห็นถึงการพึ่งพาเงื่อนไขเริ่มต้นอย่างไวในกรณีที่ลู่แยกออกจากกัน สำหรับระบบที่ไม่เป็นเชิงเส้น นี่เป็นหนึ่งในเงื่อนไข (ที่จำเป็นแต่ไม่เพียงพอ) สำหรับพฤติกรรม อลวน
แผนที่
ระบบพลวัตเชิงเส้น แบบไม่ต่อ เนื่อง ในเวลาจะมีรูปแบบเป็นสมการ ผลต่างเมทริกซ์ โดยที่Aเป็นเมทริกซ์ และbเป็นเวกเตอร์ เช่นเดียวกับในกรณีต่อเนื่อง การเปลี่ยนพิกัดx → x + (1 − A ) –1 bจะกำจัดพจน์bออกจากสมการ ในระบบพิกัด ใหม่ จุดกำเนิดเป็นจุดคงที่ของแผนที่ และคำตอบจะเป็นของระบบเชิงเส้นA n x 0คำตอบของแผนที่ไม่ได้เป็นเส้นโค้งอีกต่อไป แต่เป็นจุดที่กระโดดในปริภูมิเฟส วงโคจรถูกจัดเรียงเป็นเส้นโค้งหรือไฟเบอร์ ซึ่งเป็นกลุ่มของจุดที่แมปเข้าหาตัวเองภายใต้การกระทำของแผนที่

เช่นเดียวกับในกรณีต่อเนื่อง ค่าลักษณะเฉพาะและเวกเตอร์ลักษณะเฉพาะของAจะกำหนดโครงสร้างของปริภูมิเฟส ตัวอย่างเช่น ถ้าu 1เป็นเวกเตอร์ลักษณะเฉพาะของAที่มีค่าลักษณะเฉพาะจริงน้อยกว่าหนึ่ง เส้นตรงที่ลากผ่านจุดต่างๆ ตามα u 1โดยที่α ∈ Rจะเป็นเส้นโค้งไม่เปลี่ยนแปลงของแผนที่ จุดต่างๆ บนเส้นตรงนี้จะวิ่งไปยังจุดคงที่
นอกจากนี้ยังมีระบบพลวัตแบบไม่ต่อเนื่อง อื่นๆ อีกมากมาย เช่นแผนที่อลวน (Chaotic maps )
พลวัตในระดับท้องถิ่น
คุณสมบัติเชิงคุณภาพของระบบพลวัตจะไม่เปลี่ยนแปลงภายใต้การเปลี่ยนพิกัดอย่างราบรื่น (ซึ่งบางครั้งถือเป็นนิยามของคำว่าเชิงคุณภาพ) กล่าวคือจุดเอกฐานของสนามเวกเตอร์ (จุดที่ v ( x ) = 0) จะยังคงเป็นจุดเอกฐานภายใต้การแปลงอย่างราบรื่น วงโคจรคาบเป็นวงวนในปริภูมิเฟส และการเปลี่ยนแปลงอย่างราบรื่นของปริภูมิเฟสไม่สามารถเปลี่ยนแปลงความเป็นวงวนของมันได้ โครงสร้างของปริภูมิเฟสของระบบพลวัตสามารถเข้าใจได้ดีในบริเวณใกล้เคียงกับจุดเอกฐานและวงโคจรคาบ ในการศึกษาเชิงคุณภาพของระบบพลวัต แนวทางคือการแสดงให้เห็นว่ามีการเปลี่ยนพิกัด (โดยปกติไม่ได้ระบุ แต่สามารถคำนวณได้) ที่ทำให้ระบบพลวัตนั้นง่ายที่สุดเท่าที่จะเป็นไปได้
การแก้ไข
การไหลในบริเวณเล็กๆ ส่วนใหญ่ของปริภูมิเฟสสามารถทำให้ง่ายมากได้ ถ้าyเป็นจุดที่สนามเวกเตอร์v ( y ) ≠ 0 แล้วจะมีการเปลี่ยนพิกัดสำหรับบริเวณรอบๆyที่สนามเวกเตอร์กลายเป็นชุดของเวกเตอร์ขนานที่มีขนาดเท่ากัน นี่คือสิ่งที่เรียกว่าทฤษฎีบทการปรับแก้ (rectification theorem)
ทฤษฎีบทการปรับแก้กล่าวว่า เมื่ออยู่ห่างจากจุดเอกฐาน พลวัตของจุดในพื้นที่เล็กๆ จะเป็นเส้นตรง บางครั้งพื้นที่นั้นสามารถขยายได้โดยการต่อพื้นที่หลายๆ ส่วนเข้าด้วยกัน และเมื่อสิ่งนี้เกิดขึ้นในพื้นที่เฟสทั้งหมดMระบบพลวัตก็จะสามารถหาปริพันธ์ได้ในกรณีส่วนใหญ่ พื้นที่นั้นไม่สามารถขยายไปยังพื้นที่เฟสทั้งหมดได้ อาจมีจุดเอกฐานในสนามเวกเตอร์ (ที่v ( x ) = 0) หรือพื้นที่อาจเล็กลงเรื่อยๆ เมื่อเข้าใกล้จุดใดจุดหนึ่ง เหตุผลที่ซับซ้อนกว่านั้นคือข้อจำกัดโดยรวม ซึ่งวิถีเริ่มต้นในพื้นที่หนึ่ง และหลังจากไปเยี่ยมชมพื้นที่อื่นๆ หลายๆ ส่วน ก็จะกลับมายังพื้นที่เดิม หากครั้งต่อไปที่วงโคจรวนรอบพื้นที่เฟสในลักษณะที่แตกต่างกัน ก็เป็นไปไม่ได้ที่จะปรับแก้สนามเวกเตอร์ในพื้นที่ทั้งหมด
วงโคจรคาบใกล้เคียง
โดยทั่วไปแล้ว ในบริเวณใกล้เคียงกับวงโคจรคาบ การใช้ทฤษฎีบทการปรับแก้ จะไม่สามารถทำได้ ปวงกาเรได้พัฒนาแนวทางที่แปลงการวิเคราะห์ใกล้กับวงโคจรคาบไปเป็นการวิเคราะห์แผนที่ เลือกจุดx₀ในวงโคจร γ และพิจารณาจุดในปริภูมิเฟสในบริเวณใกล้เคียงนั้นที่ตั้งฉากกับv ( x₀ )จุดเหล่านี้คือส่วนตัดปวงกาเรS ( γ , x₀ )ของวงโคจร การไหลในตอนนี้กำหนดแผนที่แผนที่ปวงกาเรF : S → Sสำหรับจุดที่เริ่มต้นในSและกลับไปยัง Sไม่ใช่ทุกจุดจะใช้เวลาในการกลับมาเท่ากัน แต่เวลาจะใกล้เคียงกับเวลา ที่ x₀ ใช้
จุดตัดของวงโคจรคาบกับส่วนตัดปวงกาเรเป็นจุดคงที่ของแผนที่ปวงกาเรFโดยการเลื่อน สามารถสมมติได้ว่าจุดนั้นอยู่ที่x = 0 อนุกรมเทย์เลอร์ของแผนที่คือF ( x ) = J · x + O( x² )ดังนั้นการเปลี่ยนพิกัดhจึงคาดว่าจะทำให้F ง่ายขึ้น เหลือเพียงส่วนเชิงเส้น เท่านั้น

นี่คือสมการที่เรียกว่าสมการการผันแปร การค้นหาเงื่อนไขที่ทำให้สมการนี้เป็นจริงได้นั้นเป็นหนึ่งในภารกิจหลักของการวิจัยในระบบพลวัต ปวงกาเรเป็นคนแรกที่เข้าถึงสมการนี้โดยสมมติว่าฟังก์ชันทั้งหมดเป็นฟังก์ชันวิเคราะห์ และในกระบวนการนั้นเขาได้ค้นพบเงื่อนไขที่ไม่เกิดการสั่นพ้อง ถ้าλ 1 , ..., λ νเป็นค่าลักษณะเฉพาะของJค่าลักษณะเฉพาะเหล่านั้นจะเกิดการสั่นพ้องก็ต่อเมื่อค่าลักษณะเฉพาะค่าหนึ่งเป็นผลรวมเชิงเส้นจำนวนเต็มของค่าลักษณะเฉพาะอื่น ๆ สองค่าขึ้นไป เนื่องจากพจน์ในรูปแบบλ i – Σ (ผลคูณของค่าลักษณะเฉพาะอื่น ๆ) ปรากฏในตัวส่วนของพจน์สำหรับฟังก์ชันhเงื่อนไขที่ไม่เกิดการสั่นพ้องจึงเรียกอีกอย่างว่าปัญหาตัวหารขนาดเล็ก
ผลลัพธ์การผันคำ
ผลลัพธ์เกี่ยวกับการมีอยู่ของคำตอบสำหรับสมการการผันแปรขึ้นอยู่กับค่าลักษณะเฉพาะของJและระดับความเรียบที่ต้องการจากhเนื่องจากJไม่จำเป็นต้องมีสมมาตรพิเศษใดๆ ค่าลักษณะเฉพาะของมันจึงมักจะเป็นจำนวนเชิงซ้อน เมื่อค่าลักษณะเฉพาะของJไม่อยู่ในวงกลมหน่วย พลวัตใกล้จุดคงที่x₀ ของ F เรียกว่าแบบไฮเปอร์โบลิกและเมื่อค่าลักษณะเฉพาะอยู่ในวงกลมหน่วยและเป็นจำนวนเชิงซ้อน พลวัตนั้นเรียกว่าแบบวงรี
ในกรณีไฮเปอร์โบลิกทฤษฎีบทฮาร์ทแมน-โกรบแมนให้เงื่อนไขสำหรับการมีอยู่ของฟังก์ชันต่อเนื่องที่แมปบริเวณใกล้เคียงจุดตรึงของแผนที่ไปยังแผนที่เชิงเส้นJ · xกรณีไฮเปอร์โบลิกยังมีความเสถียรเชิงโครงสร้างการเปลี่ยนแปลงเล็กน้อยในสนามเวกเตอร์จะทำให้เกิดการเปลี่ยนแปลงเล็กน้อยในแผนที่ปวงกาเร และการเปลี่ยนแปลงเล็กน้อยเหล่านี้จะสะท้อนให้เห็นในการเปลี่ยนแปลงเล็กน้อยในตำแหน่งของค่าลักษณะเฉพาะของJในระนาบเชิงซ้อน ซึ่งหมายความว่าแผนที่ยังคงเป็นไฮเปอร์โบลิก
ทฤษฎีบทKolmogorov–Arnold–Moser (KAM)อธิบายถึงพฤติกรรมใกล้จุดวงรี
ทฤษฎีการแยกสาขา

เมื่อแผนที่วิวัฒนาการ Φt (หรือสนามเวกเตอร์ที่ได้มาจากแผนที่นั้น) ขึ้นอยู่กับพารามิเตอร์ μ โครงสร้างของปริภูมิเฟสก็จะขึ้นอยู่กับพารามิเตอร์นี้ด้วย การเปลี่ยนแปลงเล็กน้อยอาจไม่ก่อให้เกิดการเปลี่ยนแปลงเชิงคุณภาพในปริภูมิเฟส จนกว่าจะถึงค่า μ0พิเศษค่าหนึ่งณจุดนี้ ปริภูมิเฟสจะเปลี่ยนแปลงเชิงคุณภาพ และระบบพลวัตจะกล่าวได้ว่าได้ผ่านการแยกสาขา (bifurcation) แล้ว
ทฤษฎีการแยกสาขาพิจารณาโครงสร้างในปริภูมิเฟส (โดยทั่วไปคือจุดคงที่ วงโคจรคาบ หรือทอรัส ไม่แปรเปลี่ยน ) และศึกษาพฤติกรรมของโครงสร้างนั้นในฐานะฟังก์ชันของพารามิเตอร์ μณ จุดแยกสาขา โครงสร้างอาจเปลี่ยนแปลงเสถียรภาพ แยกออกเป็นโครงสร้างใหม่ หรือรวมเข้ากับโครงสร้างอื่น การใช้การประมาณค่าอนุกรมเทย์เลอร์ของแผนที่และความเข้าใจในความแตกต่างที่อาจถูกกำจัดได้โดยการเปลี่ยนพิกัด ทำให้สามารถจัดหมวดหมู่การแยกสาขาของระบบพลวัตได้

การแตก แขนงของจุดตรึงไฮเปอร์โบลิกx₀ ของระบบตระกูลFμสามารถระบุได้ด้วยค่าไอเกนของอนุพันธ์อันดับแรกของระบบDFμ ( x₀ )ที่คำนวณ ณ จุดแตกแขนง สำหรับแผนที่ การแตกแขนงจะเกิดขึ้นเมื่อมีค่าไอเกนของDFμ อยู่บนวงกลมหน่วย สำหรับการไหล การแตกแขนงจะเกิดขึ้นเมื่อมีค่าไอเกนอยู่บนแกนจินตนาการ สำหรับข้อมูลเพิ่มเติม โปรดดูบทความหลักเกี่ยวกับทฤษฎีการแตกแขนง
การแตกแขนงบางประเภทอาจนำไปสู่โครงสร้างที่ซับซ้อนมากในปริภูมิเฟส ตัวอย่างเช่นสถานการณ์ของ Ruelle–Takensอธิบายว่าวงโคจรคาบสามารถแตกแขนงออกเป็นทอรัส และทอรัสแตกแขนงออกเป็นตัวดึงดูดประหลาดได้ อย่างไร ในอีกตัวอย่างหนึ่งการเพิ่มคาบเป็นสองเท่าของ Feigenbaumอธิบายว่าวงโคจรคาบที่เสถียรผ่านชุดของการแตกแขนงแบบเพิ่มคาบเป็นสองเท่าได้อย่างไร
ระบบเออร์โกดิก
ในระบบพลวัตหลายระบบ สามารถเลือกพิกัดของระบบได้โดยที่ปริมาตร (จริงๆ แล้วเป็นปริมาตรมิติ ν) ในปริภูมิเฟสไม่เปลี่ยนแปลง สิ่งนี้เกิดขึ้นกับระบบเชิงกลที่ได้มาจากกฎของนิวตัน ตราบใดที่พิกัดคือตำแหน่งและโมเมนตัม และปริมาตรวัดในหน่วยของ (ตำแหน่ง) × (โมเมนตัม) การไหลจะนำจุดของเซตย่อยAไปยังจุด Φ t ( A ) และความไม่เปลี่ยนแปลงของปริภูมิเฟสหมายความว่า ในรูปแบบแฮมิลโทเนียนเมื่อกำหนดพิกัดแล้ว ก็สามารถหาโมเมนตัมที่เหมาะสม (แบบทั่วไป) ได้ โดยที่ปริมาตรที่เกี่ยวข้องจะถูกรักษาไว้โดยการไหล ปริมาตรนี้กล่าวได้ว่าคำนวณโดย การวัด ของ Liouville

ในระบบแฮมิลโทเนียน ไม่ใช่ทุกการจัดเรียงตำแหน่งและโมเมนตัมที่เป็นไปได้จะสามารถเข้าถึงได้จากเงื่อนไขเริ่มต้น เนื่องจากหลักการอนุรักษ์พลังงาน จึงสามารถเข้าถึงได้เฉพาะสถานะที่มีพลังงานเท่ากับเงื่อนไขเริ่มต้นเท่านั้น สถานะที่มีพลังงานเท่ากันจะก่อตัวเป็นเปลือกพลังงาน Ω ซึ่งเป็นส่วนย่อยของปริภูมิเฟส ปริมาตรของเปลือกพลังงาน ซึ่งคำนวณโดยใช้มาตรวัดลีอูวิลล์ จะคงที่ภายใต้การวิวัฒนาการ
สำหรับระบบที่ปริมาตรถูกรักษาไว้โดยการไหล ปวงกาเรได้ค้นพบทฤษฎีบทการเกิดซ้ำ : สมมติว่าปริภูมิเฟสมีปริมาตรลีอูวิลล์ที่จำกัด และให้Fเป็นแผนที่รักษาปริมาตรของปริภูมิเฟส และAเป็นเซตย่อยของปริภูมิเฟส จากนั้นเกือบทุกจุดในAจะกลับมายังA เป็นอนันต์ครั้ง ทฤษฎีบทการเกิดซ้ำของปวง กาเรถูกนำมาใช้โดยเซอร์เมโลเพื่อคัดค้านการคำนวณของโบลต์ซมันน์เกี่ยวกับการเพิ่มขึ้นของเอนโทรปีในระบบพลวัตของอะตอมที่ชนกัน
หนึ่งในคำถามที่งานของโบลต์ซมันน์หยิบยกขึ้นมาคือ ความเป็นไปได้ที่ค่าเฉลี่ยตามเวลาและค่าเฉลี่ยตามพื้นที่จะเท่ากัน ซึ่งเขาเรียกว่าสมมติฐานเออร์โกดิกสมมติฐานนี้ระบุว่า ระยะเวลาที่วิถีโคจรทั่วไปใช้ในบริเวณAคือ vol( A )/vol(Ω)
สมมติฐานเออร์โกดิก (ergodic hypothesis) ปรากฏว่าไม่ใช่คุณสมบัติที่จำเป็นสำหรับการพัฒนาของกลศาสตร์เชิงสถิติและได้มีการนำคุณสมบัติคล้ายเออร์โกดิกอื่นๆ มาใช้เพื่อจับภาพลักษณะที่เกี่ยวข้องของระบบทางกายภาพคูปแมน (Koopman)เข้าถึงการศึกษาของระบบเออร์โกดิกโดยใช้การวิเคราะห์เชิงฟังก์ชันตัวแปรสังเกตได้aคือฟังก์ชันที่เชื่อมโยงตัวเลข (เช่น ความดันทันที หรือความสูงเฉลี่ย) กับแต่ละจุดในปริภูมิเฟส ค่าของตัวแปรสังเกตได้สามารถคำนวณได้ในเวลาอื่นโดยใช้ฟังก์ชันวิวัฒนาการ φt ซึ่งนำไปสู่ตัวดำเนินการUt หรือตัวดำเนินการถ่ายโอน

โดยการศึกษาคุณสมบัติเชิงสเปกตรัมของตัวดำเนินการเชิงเส้นUทำให้สามารถจำแนกคุณสมบัติเชิงเออร์โกดิกของ Φt ได้ใน การใช้แนวทางของ Koopman ที่พิจารณาการ กระทำ ของการไหลบนฟังก์ชันที่สังเกตได้ ปัญหาไม่เชิงเส้นมิติจำกัดที่เกี่ยวข้องกับ Φt จะถูกแปลงเป็นปัญหาเชิงเส้นมิติอนันต์ที่เกี่ยวข้องกับ U
การวัดแบบ Liouville ที่จำกัดอยู่บนพื้นผิวพลังงาน Ω เป็นพื้นฐานสำหรับการคำนวณค่าเฉลี่ยในกลศาสตร์สถิติสมดุลค่าเฉลี่ยตามเวลาตามวิถีการเคลื่อนที่เทียบเท่ากับค่าเฉลี่ยในอวกาศที่คำนวณด้วย ปัจจัย Boltzmann exp(−β H )แนวคิดนี้ได้รับการขยายความโดย Sinai, Bowen และ Ruelle (SRB) ไปสู่ระบบพลวัตที่ใหญ่ขึ้นซึ่งรวมถึงระบบที่มีการสูญเสียพลังงานการวัดแบบ SRBแทนที่ปัจจัย Boltzmann และถูกกำหนดขึ้นบนตัวดึงดูดของระบบอลวน
ระบบพลวัตแบบไม่เชิงเส้นและความโกลาหล
ระบบอลวน
ระบบพลวัตแบบไม่เชิงเส้นอย่างง่าย รวมถึง ระบบ เชิงเส้นแบบแบ่งช่วงสามารถแสดงพฤติกรรมที่คาดเดาไม่ได้อย่างมาก ซึ่งอาจดูเหมือนสุ่ม แม้ว่าโดยพื้นฐานแล้วจะเป็นแบบกำหนดได้ก็ตาม พฤติกรรมที่คาดเดาไม่ได้นี้เรียกว่าความโกลาหลระบบไฮเปอร์โบลิกเป็นระบบพลวัตที่กำหนดไว้อย่างแม่นยำ ซึ่งแสดงคุณสมบัติที่กำหนดให้กับระบบโกลาหล ในระบบไฮเปอร์โบลิกพื้นที่สัมผัสที่ตั้งฉากกับวงโคจรสามารถแยกออกเป็นสองส่วน คือ ส่วนหนึ่งประกอบด้วยจุดที่ลู่เข้าสู่วงโคจร ( แมนิโฟลด์เสถียร ) และอีกส่วนหนึ่งประกอบด้วยจุดที่แยกออกจากวงโคจร ( แมนิโฟลด์ไม่เสถียร )
สาขาคณิตศาสตร์ นี้ ศึกษาพฤติกรรมเชิงคุณภาพในระยะยาวของระบบพลวัต โดยมุ่งเน้นที่คำถามต่างๆ เช่น "ระบบจะเข้าสู่สภาวะสมดุลในระยะยาวหรือไม่ และถ้าเป็นเช่นนั้นตัวดึงดูด ที่เป็นไปได้คืออะไร " หรือ "พฤติกรรมในระยะยาวของระบบขึ้นอยู่กับเงื่อนไขเริ่มต้นหรือไม่"
พฤติกรรมที่ไร้ระเบียบของระบบที่ซับซ้อนไม่ใช่ประเด็นสำคัญ เป็น ที่ทราบกันมานานแล้วว่า อุตุนิยมวิทยาเกี่ยวข้องกับพฤติกรรมที่ซับซ้อน—หรือแม้แต่ไร้ระเบียบ— ทฤษฎีความโกลาหลนั้นน่าประหลาดใจมาก เพราะความโกลาหลสามารถพบได้ในระบบที่แทบจะไม่มีอะไรซับซ้อนเลยสถานการณ์ Pomeau–Mannevilleของแผนที่โลจิสติกส์และปัญหา Fermi–Pasta–Ulam–Tsingouเกิดขึ้นจากพหุนามดีกรีสองเท่านั้นแผนที่เกือกม้าเป็นแบบเชิงเส้นแบบแบ่งส่วน
วิธีแก้ปัญหาที่มีระยะเวลาจำกัด
สำหรับ ODE อัตโนมัติที่ไม่เป็นเชิงเส้นนั้น เป็นไปได้ภายใต้เงื่อนไขบางประการที่จะพัฒนาโซลูชันที่มีระยะเวลาจำกัด[ 104 ]ซึ่งหมายความว่าในโซลูชันเหล่านี้ ระบบจะถึงค่าศูนย์ ณ เวลาใดเวลาหนึ่ง ซึ่งเรียกว่าเวลาสิ้นสุด และจากนั้นจะคงอยู่ที่ค่านั้นตลอดไป สิ่งนี้สามารถเกิดขึ้นได้ก็ต่อเมื่อวิถีของระบบไม่ได้ถูกกำหนดอย่างเฉพาะเจาะจงไปข้างหน้าและย้อนกลับในเวลาโดยพลวัต ดังนั้นโซลูชันที่มีระยะเวลาจำกัดจึงบ่งบอกถึงรูปแบบของ "ความไม่แน่นอนย้อนกลับในเวลา" ที่เกี่ยวข้องอย่างใกล้ชิดกับความไม่แน่นอนไปข้างหน้าในเวลาของความโกลาหล พฤติกรรมนี้ไม่สามารถเกิดขึ้นได้สำหรับ สมการเชิงอนุพันธ์ ต่อเนื่องแบบลิปชิตซ์ตามการพิสูจน์ทฤษฎีบท Picard-Lindelofโซลูชันเหล่านี้เป็นฟังก์ชันที่ไม่ใช่ลิปชิตซ์ ณ เวลาสิ้นสุด และไม่สามารถเป็นฟังก์ชันเชิงวิเคราะห์บนเส้นจำนวนจริงทั้งหมดได้
ตัวอย่างเช่น สมการ: ยอมรับคำตอบที่มีระยะเวลาจำกัด: นั่นคือเป็นศูนย์สำหรับและไม่ต่อเนื่องแบบลิปชิตซ์ ณ เวลาสิ้นสุด




ระบบพลวัตเชิงพีชคณิต
ระบบพลวัตเชิงพีชคณิตสามารถพิจารณาได้ว่าเป็นกรณีพิเศษเชิงพีชคณิตของนิยามทางเรขาคณิตแบบคลาสสิก โดยอาศัยแผนที่วิวัฒนาการเวลาเชิงพีชคณิตเป็นการกระทำของกลุ่ม หรือโดย ปริยายเป็นระบบสมการเชิงพีชคณิตแทนที่จะเป็นสมการ เชิงอนุพันธ์สามัญ จากมุมมองทางทฤษฎีการวัดแมนิโฟลด์เป็นปริภูมิการวัด วาไรตี้กลุ่มพีชคณิตและกลุ่มโทโพโลยีดังนั้นจึงเน้นที่สมมาตรและ พฤติกรรม ของทฤษฎีเออร์โกดิกระบบเหล่านี้มักได้รับการศึกษาด้วยวิธีการจากพีชคณิตนามธรรมเรขาคณิตเชิงพีชคณิตและทฤษฎีกาโลอิส
ในบริบทของทฤษฎีสนามควอนตัมเชิงพีชคณิตพื้นที่การวัดสามารถเป็นพีชคณิต C* ได้ กล่าวคือสิ่งที่สังเกตได้ไม่ได้เป็นเพียงพีชคณิตของฟังก์ชัน[ 105 ]แต่เป็นพีชคณิตตัวดำเนินการและสิ่งนี้ได้รับการปฏิบัติร่วมกับกลุ่มเกจทั่วโลก (เช่น กลุ่มข้อจำกัดที่ทำให้สิ่งที่สังเกตได้ไม่เปลี่ยนแปลง) [ 106 ]
ในบริบทของการเรียนรู้ของเครื่อง เครือ ข่ายประสาทเทียมเอง (เช่นเครือข่ายประสาทเทียมแบบเรียกซ้ำโมเดลการแพร่กระจาย ) สามารถถือได้ว่าเป็นชุดของสมการพีชคณิต (บ่อยครั้งที่สมการเหล่านี้เป็นการประมาณค่าแบบจำกัด เช่นการไล่ระดับลง ) มีแนวคิดของขั้นตอนเวลาพลวัตวิวัฒนาการทั่วทั้งเครือข่าย และในที่สุดก็มีชุดข้อจำกัดพีชคณิตแยกต่างหาก เช่น การบังคับใช้พฤติกรรมที่ไม่พึงประสงค์[ 107 ] [ 108 ]
ในบริบทของเรขาคณิตและทฤษฎีจำนวนโดยทั่วไปจะศึกษาการวนซ้ำของแผนที่เชิงตรรกะเหนือฟิลด์จำนวน เฉพาะ พื้นที่นี้เรียกว่าพลวัตเชิงพีชคณิต[ 109 ]ซึ่งศึกษาเรื่องต่างๆ เช่น จุดเชิงตรรกะของเส้นโค้งพีชคณิต และมีความเชื่อมโยงอย่างลึกซึ้งกับพลวัตเชิงเลขคณิต
ตัวอย่างหนึ่งคือแผนที่ Ponceletซึ่งจุดจะเคลื่อนที่ทีละขั้นระหว่างภาคตัดกรวย สองอันที่กำหนด และสมการเป็นพีชคณิต (เช่น เส้นสัมผัสและจุดตัด) อีกตัวอย่างหนึ่งคือบิลเลียดที่มีขอบเป็นเส้นโค้งพีชคณิตเช่น บิลเลียดวงรี ในกรณีนี้พลวัตจะถูกกำหนดโดยการสะท้อน[ 110 ]
โปรดทราบว่าเส้นโค้งพีชคณิตสามารถหาอนุพันธ์ได้เกือบทุกที่ (ยกเว้นจุดจำนวนจำกัด) ดังนั้นจึงสามารถศึกษาเส้นโค้งเหล่านี้ได้ด้วยวิธีการวิเคราะห์ ในสองตัวอย่างนี้ พลวัตแบบต่อเนื่องเป็นแบบเชิงเส้นเป็นช่วงๆ เหตุการณ์สำคัญมักจะเป็นแบบไม่ต่อเนื่อง แม้ว่าอาจจะเป็นเซตอนันต์หรือแม้แต่เซตที่วัดได้ (เช่น วิถีการเคลื่อนที่แบบเออร์โกดิกในเกมบิลเลียด) เหตุการณ์สำคัญคือเมื่อสมการพีชคณิตใช้ได้ (เช่น การสะท้อนบนขอบ) ดังนั้นระบบเหล่านี้จึงสามารถศึกษาได้ในฐานะระบบพลวัตแบบไม่ต่อเนื่องเช่นกัน
พลวัตที่มีประสิทธิภาพ
พลศาสตร์เชิงประสิทธิผล (Effective dynamics) คือการลดทอนสมการการเคลื่อนที่ที่อธิบายระบบในระดับหนึ่งหรือพฤติกรรมเฉพาะ โดยทั่วไปจะตัดตัวแปรอิสระ บางส่วนออก ไป แทนที่จะแก้สมการสถานะจุลภาคกล่าวคือ ปฏิสัมพันธ์ที่แน่นอนสำหรับอะตอม โมเลกุล หรือโหนดเครือข่ายประสาททั้งหมด พลศาสตร์เชิงประสิทธิผลจะจำลองแรง พลังงาน หรือชุดพารามิเตอร์และสมการ "เชิงประสิทธิผล" ที่อธิบายผลกระทบโดยรวม
โดยทั่วไปแล้ว พลวัตที่มีประสิทธิภาพเกิดขึ้นจากการทำให้ปรากฏการณ์ที่ไม่เป็นเชิงเส้นที่ซับซ้อนง่ายขึ้นหรือมีความเฉพาะเจาะจงมากขึ้น วิธีหลักในการบรรลุเป้าหมายนี้คือ การ ใช้ค่าเฉลี่ยของกลุ่มตัวอย่างและสิ่งนี้เชื่อมโยงอย่างลึกซึ้งกับทฤษฎีเออร์โกดิกและกลุ่มการปรับมาตรฐานแง่มุมสำคัญของพลวัตที่มีประสิทธิภาพคือแนวคิดของการเกิดขึ้นเช่น การเกิดขึ้นของ พฤติกรรมเชิงเส้นจากสมการที่ไม่เป็นเชิงเส้น เช่นในโซลิตอนหรือ การเกิดขึ้น เชิงเส้นจากค่าเฉลี่ยของกลุ่มตัวอย่างการเกิดขึ้นของลำดับและระดับความเป็นอิสระในการเปลี่ยนเฟสเช่นในทฤษฎีแลนเดาการเกิดขึ้นของ รูปแบบ จำนวนเฉพาะในพลวัตการ ซึมผ่าน
ตัวอย่างของแนวทางเหล่านี้ ได้แก่ ทฤษฎีสนามที่มีประสิทธิภาพ, สมการ Navier-Stokes เฉลี่ยของ Reynolds (RANS), ระบบควอนตัมที่ไม่เป็นระเบียบ, [ 111 ]อุณหพลศาสตร์ และการเปลี่ยนเฟส
ทฤษฎีหมวดหมู่สำหรับระบบพลวัต
ในช่วงระหว่างปี 2000 ถึง 2020 ทฤษฎีหมวดหมู่ได้ถูกนำไปประยุกต์ใช้กับทฤษฎีระบบ (เช่น ระบบเปิดและระบบย่อย) [ 112 ]และระบบพลวัต[ 113 ] [ 114 ] [ 115 ]แรงจูงใจคือการศึกษาคุณสมบัติทั่วไปในระบบพลวัต ระบบพลวัตเชิงโทโพโลยี (เช่น ที่มีปริภูมิสถานะกระชับ) และระบบพลวัตที่รักษาการวัด (เช่น ระบบแฮมิลโทเนียน) [ 116 ] นอกจากนี้ยังสามารถเปรียบเทียบระหว่างทฤษฎีการแสดงแทนกลุ่ม (เช่นการแสดงแทนแบบลดทอนไม่ได้ ) และการแยกส่วนแบบเออร์โกดิก[ 117 ]กล่าวคือ การวัดแบบไม่เปลี่ยนแปลงทุกตัว (เช่น การวัด แบบอนุรักษ์ ) เป็นส่วนผสมของการวัดแบบเออร์โกดิก ในลักษณะที่คล้ายคลึงกับทฤษฎีบทขีดจำกัดกลางในที่สุดสิ่งนี้สามารถเปรียบเทียบได้กับทฤษฎีบทพื้นฐานของเลขคณิตและการแยกส่วนจำนวนเฉพาะ[ 118 ]
ดูเพิ่มเติม
- การสร้างแบบจำลองพฤติกรรม
- การสร้างแบบจำลองทางปัญญา
- พลวัตที่ซับซ้อน
- แนวทางการพัฒนาภาษาที่สองแบบไดนามิก
- พลศาสตร์ (กลศาสตร์)
- การพาสซีฟแบบป้อนกลับ
- การประกอบฟังก์ชันวิเคราะห์แบบอนันต์
- รายชื่อหัวข้อระบบพลวัต
- การสั่น
- ผู้คนในระบบและการควบคุม
- ทฤษฎีบทของชาร์คอฟสกี
- ทฤษฎีบทพื้นฐานของระบบพลวัตของคอนลีย์
- พลวัตของระบบ
- ทฤษฎีระบบ
- หลักการของขนาดสูงสุด
อ่านเพิ่มเติม
- Arnold, Vladimir I. (2006). "แนวคิดพื้นฐาน". สมการเชิงอนุพันธ์สามัญ . เบอร์ลิน: Springer Verlag. ISBN 3-540-34563-9.
- Chueshov, ID บทนำสู่ทฤษฎีของระบบการสูญเสียพลังงานมิติอนันต์ฉบับออนไลน์ของฉบับพิมพ์ครั้งแรกบนเว็บไซต์ EMIS [1 ]
- ระบบพลวัตมิติอนันต์ในกลศาสตร์และฟิสิกส์วิทยาศาสตร์คณิตศาสตร์ประยุกต์ เล่มที่ 68 ปี 1997 doi : 10.1007 /978-1-4612-0645-3 ISBN 978-1-4612-6853-6.
ผลงานที่ครอบคลุมในวงกว้าง:
- ราล์ฟ อับราฮัมและเจอร์โรลด์ อี. มาร์สเดน (1978). พื้นฐานของกลศาสตร์ . เบนจามิน-คัมมิงส์. ISBN 978-0-8053-0102-1. (มีจำหน่ายในรูปแบบพิมพ์ซ้ำ: ISBN) 0-201-40840-6)
- สารานุกรมวิทยาศาสตร์คณิตศาสตร์ ( ISSN 0938-0396 ) มีชุดย่อยเกี่ยวกับระบบพลวัตพร้อมบทวิจารณ์งานวิจัยปัจจุบัน
- Christian Bonatti; Lorenzo J. Díaz; Marcelo Viana (2005). พลวัตที่เหนือกว่าความเป็นไฮเปอร์โบลิกสม่ำเสมอ: มุมมองทางเรขาคณิตและเชิงความน่าจะเป็นระดับโลก . Springer. ISBN 978-3-540-22066-4.
- Stephen Smale (1967). "ระบบไดนามิกที่หาอนุพันธ์ได้" . Bulletin of the American Mathematical Society . 73 (6): 747– 817. Bibcode : 1967BAMaS..73..747S . doi : 10.1090/S0002-9904-1967-11798-1 .
บทนำที่มีมุมมองที่เป็นเอกลักษณ์:
- VI Arnold (1982). วิธีการทางคณิตศาสตร์ของกลศาสตร์คลาสสิก . Springer-Verlag. ISBN 978-0-387-96890-2.
- Jacob PalisและWelington de Melo (1982). ทฤษฎีทางเรขาคณิตของระบบพลวัต: บทนำ . Springer-Verlag. ISBN 978-0-387-90668-3.
- David Ruelle (1989). องค์ประกอบของพลวัตเชิงอนุพันธ์และทฤษฎีการแยกสาขา . สำนักพิมพ์ Academic Press. ISBN 978-0-12-601710-6.
- ทิม เบดฟอร์ด, ไมเคิล คีน และแคโรไลน์ ซีรีส์ ( บรรณาธิการ) (1991). ทฤษฎีเออร์โกดิก พลวัตเชิงสัญลักษณ์ และปริภูมิไฮเปอร์โบลิก . สำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด. ISBN 978-0-19-853390-0.
{{cite book}}: CS1 maint: multiple names: authors list (link) - ราล์ฟ เอช. อับราฮัมและคริสโตเฟอร์ ดี. ชอว์ (1992). พลศาสตร์ – เรขาคณิตแห่งพฤติกรรม (ฉบับที่ 2). แอดดิสัน-เวสลีย์. ISBN 978-0-201-56716-8.
ตำราเรียน
- Kathleen T. Alligood, Tim D. Sauer และJames A. Yorke (2000). ความโกลาหล: บทนำสู่ระบบพลวัต . สำนักพิมพ์ Springer Verlag. ISBN 978-0-387-94677-1.
- โอเดด กาเลอร์ (2011)ระบบพลวัตแบบไม่ต่อเนื่องสปริงเกอร์ISBN 978-3-642-07185-0.
- Morris W. Hirsch , Stephen SmaleและRobert L. Devaney (2003). สมการเชิงอนุพันธ์ ระบบพลวัต และบทนำสู่ความโกลาหลสำนักพิมพ์ Academic Press. ISBN 978-0-12-349703-1.
- อนาโตล คาทอก; บอริส ฮัสเซลแบลตต์ (1996). บทนำสู่ทฤษฎีสมัยใหม่ของระบบพลวัต . เคมบริดจ์. ISBN 978-0-521-57557-7.
- Stephen Lynch (2010). ระบบพลวัตพร้อมการประยุกต์ใช้โดยใช้ Maple (ฉบับที่ 2). Springer. ISBN 978-0-8176-4389-8.
- Stephen Lynch (2014). ระบบพลวัตพร้อมการประยุกต์ใช้ MATLAB (ฉบับที่ 2). สำนักพิมพ์ Springer International. ISBN 978-3319068190.
- Stephen Lynch (2017). ระบบพลวัตพร้อมการประยุกต์ใช้โดยใช้ Mathematica (ฉบับที่ 2). Springer. ISBN 978-3-319-61485-4.
- Stephen Lynch (2018). ระบบพลวัตพร้อมการประยุกต์ใช้ด้วย Python . สำนักพิมพ์ Springer International. ISBN 978-3-319-78145-7.
- เจมส์ ไมส์ (2007). ระบบพลวัตเชิงอนุพันธ์ . SIAM. ISBN 978-0-89871-635-1.
- David D. Nolte (2015). บทนำสู่พลวัตสมัยใหม่: ความโกลาหล เครือข่าย อวกาศ และเวลาสำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ดISBN 978-0199657032.
- จูเลียน คลินตัน สโปรตต์ (2003)ความโกลาหลและการวิเคราะห์อนุกรมเวลาสำนักพิมพ์มหาวิทยาลัยออกซ์ฟอร์ด ISBN 978-0-19-850839-7.
- Steven H. Strogatz (1994). พลวัตไม่เชิงเส้นและความโกลาหล: พร้อมการประยุกต์ใช้ในฟิสิกส์ ชีววิทยา เคมี และวิศวกรรม Addison Wesley. ISBN 978-0-201-54344-5.
- Teschl, Gerald (2012). สมการเชิงอนุพันธ์สามัญและระบบพลวัต . พรอวิเดนซ์ : สมาคมคณิตศาสตร์อเมริกัน . ISBN 978-0-8218-8328-0.
- Stephen Wiggins (2003). บทนำสู่ระบบพลวัตประยุกต์และความโกลาหล . Springer. ISBN 978-0-387-00177-7.
การเผยแพร่ให้เป็นที่นิยม:
- ฟลอริน ดิอาคูและฟิลิป โฮล์มส์ (1996). การเผชิญหน้าบนท้องฟ้า . พรินซ์ตัน. ISBN 978-0-691-02743-2.
- เจมส์ ไกลค์ (1988). ความวุ่นวาย: การสร้างวิทยาศาสตร์รูปแบบใหม่ . เพนกวิน. ISBN 978-0-14-009250-9.
- Ivar Ekeland (1990). คณิตศาสตร์และความไม่คาดคิด (ปกอ่อน) . สำนักพิมพ์มหาวิทยาลัยชิคาโก. ISBN 978-0-226-19990-0.
- เอียน สจ๊วต (1997). พระเจ้าเล่นลูกเต๋าหรือไม่? คณิตศาสตร์ใหม่แห่งความโกลาหล . เพนกวิน. ISBN 978-0-14-025602-4.
ลิงก์ภายนอก
- หลักสูตรระบบพลวัตที่เป็นสาธารณสมบัติของ มหาวิทยาลัยฮาร์วาร์ด
- เว็บไซต์ Arxiv ซึ่งเป็นเซิร์ฟเวอร์สำหรับเผยแพร่บทความวิจัยก่อนตีพิมพ์ มีการส่งบทความวิจัย (ที่ไม่ผ่านการตรวจสอบโดยผู้ทรงคุณวุฒิ) ในสาขาระบบพลวัตเข้ามาทุกวัน
- สารานุกรมระบบพลวัตส่วนหนึ่งของScholarpedia – ผ่านการตรวจสอบโดยผู้ทรงคุณวุฒิและเขียนโดยผู้เชี่ยวชาญที่ได้รับเชิญ
- พลวัตไม่เชิงเส้นแบบจำลองของการแตกแขนงและความโกลาหล โดย เอลเมอร์ จี. ไวนส์
- คำถามที่พบบ่อยเกี่ยวกับวิทยาศาสตร์ที่ไม่เป็น เชิงเส้น (Sci.Nonlinear FAQ 2.0) (กันยายน 2546)ให้คำจำกัดความ คำอธิบาย และแหล่งข้อมูลที่เกี่ยวข้องกับวิทยาศาสตร์ที่ไม่เป็นเชิงเส้น
หนังสือออนไลน์หรือเอกสารประกอบการบรรยาย
- ทฤษฎีทางเรขาคณิตของระบบพลวัต บันทึกการบรรยายของนิลส์ เบิร์กลุนด์ สำหรับหลักสูตรระดับปริญญาตรีขั้นสูง ที่ ETH
- ระบบพลวัตหนังสือของ George D. Birkhoff ในปี 1927 ได้นำเสนอแนวทางที่ทันสมัยเกี่ยวกับระบบพลวัตแล้ว
- ความโกลาหล: แบบคลาสสิกและแบบควอนตัมบทนำสู่ระบบพลวัตจากมุมมองของวงโคจรคาบ
- การเรียนรู้ระบบพลวัต บทช่วยสอนเกี่ยวกับการเรียนรู้ระบบพลวัต
- สมการเชิงอนุพันธ์สามัญและระบบพลวัต บันทึกการบรรยายโดยเจอรัลด์ เทสช์ล
กลุ่มวิจัย
- กลุ่มวิจัยระบบพลวัตแห่งโกรนิงเงน , IWI, มหาวิทยาลัยโกรนิงเงน
- โครงการ Chaos ที่ UMDมุ่งเน้นการประยุกต์ใช้ระบบพลวัต
- [2] , SUNY Stony Brook รายชื่อการประชุม นักวิจัย และปัญหาที่ยังเปิดอยู่บางส่วน
- ศูนย์พลศาสตร์และเรขาคณิตมหาวิทยาลัยเพนน์สเตท
- สาขาวิชาระบบควบคุมและพลวัต , สถาบันเทคโนโลยีแคลิฟอร์เนีย (Caltech)
- ห้องปฏิบัติการระบบไม่เชิงเส้น , Ecole Polytechnique Fédérale de Lausanne (EPFL)
- ศูนย์ระบบพลวัตมหาวิทยาลัยเบรเมน
- กลุ่มวิเคราะห์ระบบ การสร้างแบบจำลอง และการทำนายมหาวิทยาลัยออกซ์ฟอร์ด
- กลุ่มพลศาสตร์ไม่เชิงเส้น , Instituto Superior Técnico, มหาวิทยาลัยเทคนิคแห่งลิสบอน
- Dynamical Systems ถูกเก็บถาวรเมื่อ 2017-06-02 ที่Wayback Machine , IMPA, Instituto Nacional de Matemática Pura e Applicada
- กลุ่มงานพลศาสตร์ไม่เชิงเส้น (Nonlinear Dynamics Workgroup) เก็บถาวรเมื่อวันที่ 21 มกราคม 2015 ที่Wayback Machineสถาบันวิทยาการคอมพิวเตอร์ สถาบันวิทยาศาสตร์แห่งสาธารณรัฐเช็ก
- กลุ่มวิจัยระบบพลวัต UPC บาร์เซโลนามหาวิทยาลัยโพลีเทคนิคแห่งคาตาโลเนีย
- ศูนย์ควบคุม ระบบพลวัต และการคำนวณมหาวิทยาลัยแคลิฟอร์เนีย ซานตาบาร์บารา
สรุปเนื้อหา
ข้อมูลสำคัญจากบทความ
ข้อมูลสำคัญเกี่ยวกับ ระบบพลวัต
ใน คณิตศาสตร์ ฟิสิกส์ วิศวกรรม และ ทฤษฎีระบบ ระบบ พลวัต คือคำอธิบายว่าระบบเปลี่ยนแปลงไปอย่างไรเมื่อเวลา ผ่าน ไป
ภาพรวม
แนวคิดของระบบพลวัตมีต้นกำเนิดมาจาก กลศาสตร์ของนิวตัน และโดยเฉพาะอย่างยิ่งใน กลศาสตร์ดาราศาสตร์ ที่นั่น เช่นเดียวกับในวิทยาศาสตร์ธรรมชาติและสาขาวิศวกรรมอื่นๆ มีความจำเป็นต้องทำนายวิวัฒนาการของระบบ แต่บางทีอาจมีคำถามอื่นๆ เช่น เสถียรภาพ...
ตัวอย่าง
ตัวอย่างง่ายๆ ได้แก่ แบบจำลองทางคณิตศาสตร์ ที่อธิบายการแกว่งของ ลูกตุ้ม นาฬิกา การไหลของน้ำในท่อ การ เคลื่อนที่แบบสุ่มของอนุภาคในอากาศ และ จำนวนปลาในทะเลสาบในช่วงฤดูใบไม้ผลิแต่ละ ปี
ประวัติศาสตร์
หลายคนถือว่า อองรี ปวงกาเร นักคณิตศาสตร์ชาวฝรั่งเศส เป็นผู้ก่อตั้งระบบพลวัต [ 15 ] ปวงกาเรตีพิมพ์เอกสารทางวิชาการคลาสสิกสองฉบับ ได้แก่ "วิธีการใหม่ของกลศาสตร์ท้องฟ้า" (พ.ศ. 2435–2442) และ "การบรรยายเกี่ยวกับกลศาสตร์ท้องฟ้า" (พ.ศ.